Предпосылки создания изобретения
1. Область техники, к которой относится изобретение
Настоящее изобретение относится к области радиографии, а более конкретно к системе и способу для реконструирования изображения путем использования сканирования по прямолинейной траектории для повышения скорости сканирования при трехмерной стереографии.
2. Описание предшествующего уровня техники
С развитием компьютерной томографической (КТ) технологии появилась возможность реконструкции томографического изображения с хорошим качеством в случае, когда спроецированные данные получают в ограниченном угле или данные являются усеченными. Поэтому становится удобно применять неполное сканирование и реконструировать приближенные изображения. Теоретически, в случае системы формирования изображения с прямолинейной траекторией, если длина траектории сканирования является бесконечной, может быть получена точная реконструкция. Если траектория имеет конечную длину, то это эквивалентно компьютерному томографическому сканированию с ограниченным углом. Поэтому путем использования компьютерных томографических реконструкций, осуществляемых при неполных данных, изображения в поперечных сечениях могут быть получены в системе формирования изображения с прямолинейной траекторией, и может быть осуществлена стереоскопическая радиография.
При практических проверках состояния безопасности быстрый таможенный досмотр и вращение больших объектов представляют собой две трудности. Это происходит потому, что в известных компьютерных томографических системах формирования изображения приходится вращать досматриваемый объект или вращать детектор и источник, в то время как объект остается неподвижным. Иначе говоря, трудно досматривать объект большого объема, такой как автопоезд или грузовой автомобиль. Кроме того, круговому сканированию коническим лучом присущ еще один недостаток, заключающийся в проблеме большого конического угла.
Что касается указанных выше проблем, то уже была предложена система формирования изображения, имеющая прямолинейную траекторию, компьютерная система послойного исследования. Она имеет небольшой диапазон углов проекции, и часто используются алгоритмы реконструкции типа томографического синтеза. В результате она является неудовлетворительной в части возможности формирования трехмерных стереоскопических изображений и поэтому не применяется при проверках состояния безопасности. Для реконструкции изображения при прямолинейной траектории обычно выбирают алгоритм ребининга (перегруппировки участков мгновенного снимка динамического изображения) в параллельный пучок, при котором осуществляют ребининг (перегруппировку) спроецированных данных от сканирования по прямолинейной траектории в данные при сканировании параллельным пучком, и затем осуществляют реконструкцию путем обратного проецирования отфильтрованных данных при параллельном пучке. Однако проблема этого алгоритма заключается в низком пространственном разрешении. Это потому, что, когда осуществляют ребининг данных, сканированных по прямолинейной траектории, в данные, сканированные параллельным пучком, необходимы интерполяции по угловому направлению и направлению детекторов, и пространственное разрешение в реконструированных изображениях может снижаться.
Сущность изобретения
Настоящее изобретение выполнено с учетом указанных выше проблем. Задача настоящего изобретения заключается в создании системы и способа для реконструкции изображения на основании сканирования по прямолинейной траектории. В этом способе необязательно осуществлять ребининг спроецированных данных в параллельный пучок, так что исключается снижение разрешения изображения вследствие интерполяций по угловому направлению и направлению детекторов во время ребининга данных. Поэтому качество реконструированного изображения повышается.
В соответствии с одним объектом настоящего изобретения предложена система реконструкции изображения на основании сканирования по прямолинейной траектории, которая содержит: секцию преобразования спроецированных данных для преобразования спроецированных данных при сканировании по прямолинейной траектории в спроецированные данные при сканировании квазипараллельным пучком; секцию фильтрации для получения отфильтрованных спроецированных данных путем свертки спроецированных данных при сканировании квазипараллельным пучком с предварительно определенным ядром свертки; и секцию обратного проецирования для реконструкции изображения путем обратного проецирования с весовым коэффициентом отфильтрованных спроецированных данных.
Кроме того, согласно варианту осуществления настоящего изобретения, система, связанная с реконструкцией изображения, дополнительно содержит детекторную матрицу, включающую в себя множество детекторных элементов, для приема проходящих сигналов, порожденных излучениями, которые испускаются от источника излучения и проникают сквозь досматриваемый объект, и для преобразования проходящих излучений в спроецированные данные.
Кроме того, согласно варианту осуществления настоящего изобретения множество детекторных элементов размещено в соответствии с одним и тем же интервалом размещения.
Кроме того, согласно варианту осуществления настоящего изобретения в секции преобразования спроецированных данных осуществляются обращение и сдвиг спроецированных данных p(l,t,z) для получения спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,t,z) обозначают спроецированное значение с координатой t в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии; в секции фильтрации осуществляется одномерная свертка спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',t,z); в секции обратного проецирования осуществляется обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',t,z) по направлению проекции излучения для получения реконструированного изображения.
Кроме того, согласно варианту осуществления настоящего изобретения множество детекторных элементов размещено вокруг источника излучения в соответствии с одним и тем же угловым интервалом.
Кроме того, согласно варианту осуществления настоящего изобретения в секции преобразования спроецированных данных осуществляются обращение и сдвиг спроецированных данных p(l,γ,z) для получения спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,γ,z) обозначают спроецированное значение при угловом положении γ в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии; в секции фильтрации осуществляется одномерная свертка спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',γ,z); в секции обратного проецирования осуществляется обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',γ,z) по направлению проекции излучения для получения реконструированного изображения.
Согласно другому объекту настоящего изобретения предложен способ реконструкции изображения на основании сканирования по прямолинейной траектории, содержащий: этап преобразования спроецированных данных для преобразования спроецированных данных при сканировании по прямолинейной траектории в спроецированные данные при сканировании квазипараллельным пучком; этап фильтрации для получения отфильтрованных спроецированных данных путем свертки спроецированных данных при сканировании квазипараллельным пучком с предварительно определенным ядром свертки; и этап обратного проецирования для реконструкции изображения путем обратного проецирования с весовым коэффициентом отфильтрованных спроецированных данных.
Кроме того, согласно варианту осуществления настоящего изобретения способ реконструкции изображения дополнительно содержит этап, на котором принимают проходящие сигналы, порождаемые излучениями, которые испускаются от источника излучения и проникают сквозь досматриваемый объект, и преобразуют проходящие сигналы в спроецированные данные посредством детекторной матрицы, включающей в себя множество детекторных элементов.
Кроме того, согласно варианту осуществления настоящего изобретения множество детекторных элементов размещают в соответствии с одним и тем же интервалом размещения.
Кроме того, согласно варианту осуществления настоящего изобретения на этапе преобразования спроецированных данных осуществляют обращение и сдвиг спроецированных данных p(l,t,z) для получения спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,t,z) обозначают спроецированное значение с координатой t в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии; на этапе фильтрации осуществляют одномерную свертку спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',t,z); на этапе обратного проецирования осуществляют обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',t,z) по направлению проекции излучения для получения реконструированного изображения.
Кроме того, согласно варианту осуществления настоящего изобретения множество детекторных элементов размещают относительно источника излучения в соответствии с одним и тем же угловым интервалом.
Кроме того, согласно варианту осуществления настоящего изобретения на этапе преобразования спроецированных данных осуществляют обращение и сдвиг спроецированных данных p(l,γ,z) для получения спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,γ,z) обозначают спроецированное значение при угловом положении γ в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии; на этапе фильтрации осуществляют одномерную свертку спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',γ,z); на этапе обратного проецирования осуществляют обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',γ,z) по направлению проекции излучения для получения реконструированного изображения.
По сравнению с алгоритмом ребининга в параллельный пучок в настоящем изобретении повышается пространственное разрешение изображения, а влияние усечения данных уменьшается. В настоящем изобретении применен способ фильтрации и обратного проецирования, и поэтому оно имеет обычные преимущества фильтрации и обратного проецирования, такие как простота и эффективность. И оно без труда распараллеливается и ускоряется.
Следовательно, по сравнению с обычным радиоскопическим сканером, посредством системы согласно настоящему изобретению получаются как цифровое радиографическое (ЦР) изображение, так и томографическое изображение, решается проблема перекрывающихся объектов, существующая в радиоскопических системах, и может быть быстро получено стереоскопическое изображение в области проверки состояния безопасности. По сравнению с обычной компьютерной томографической системой формирования изображения система согласно настоящему изобретению имеет преимущества, заключающиеся в быстрой скорости контроля, отсутствии вращения и проблем, таких как проблема большого конического угла в круговом компьютерном томографическом сканере с коническим лучом.
Краткое описание чертежей
На чертежах:
фиг.1 - вид в плане сканирования по прямолинейной траектории, осуществляемого в системе формирования изображения согласно настоящему изобретению;
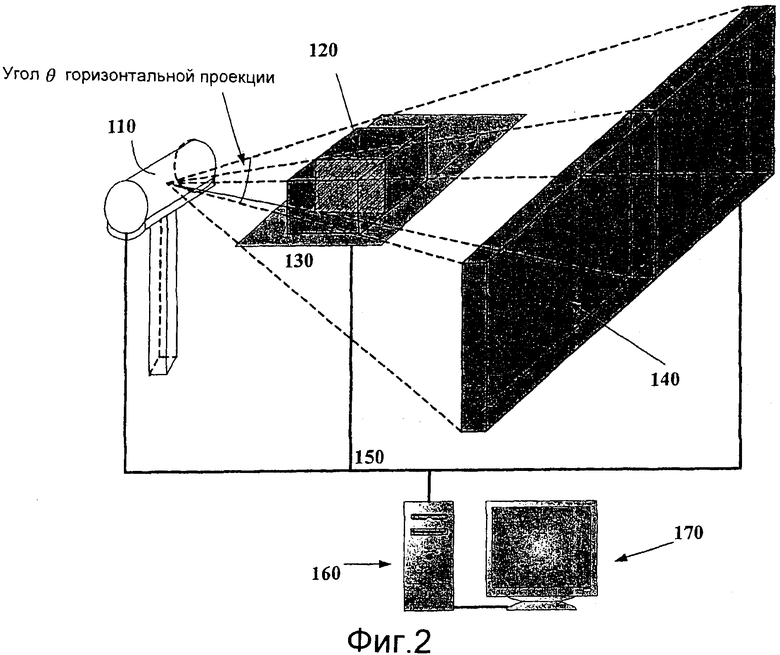
фиг.2 - структурная схема системы формирования изображения согласно настоящему изобретению;
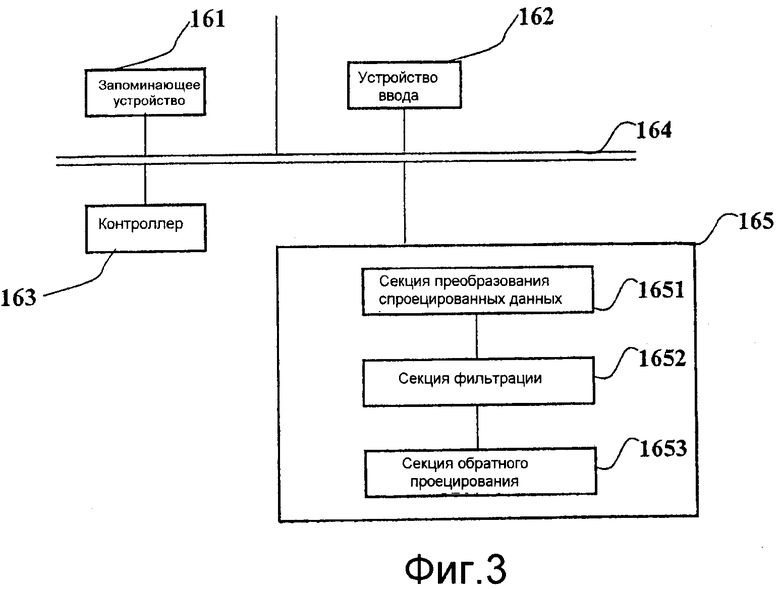
фиг.3 - функциональная схема блока управления и обработки изображения в системе формирования изображения, показанной на фиг.2;
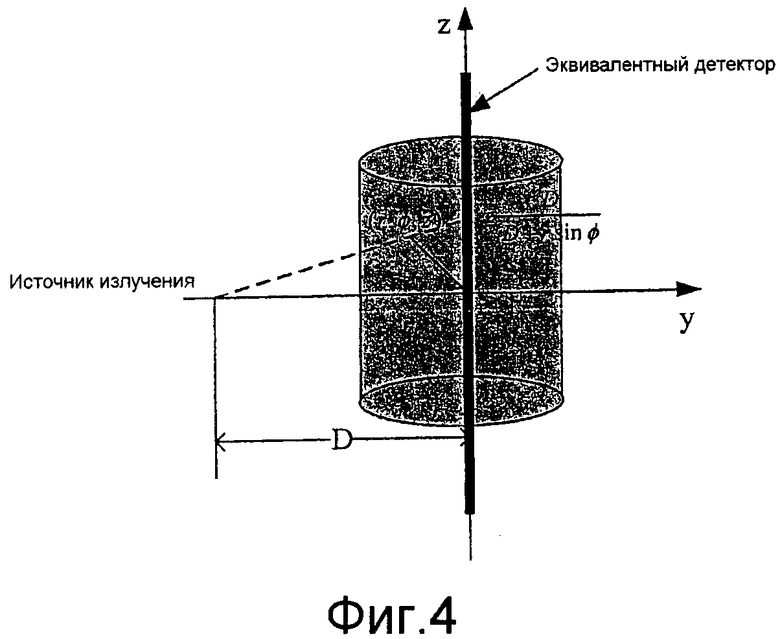
фиг.4 - схематическое графическое представление, иллюстрирующее геометрические отношения между эквивалентным детектором и точкой объекта, подлежащего реконструкции, в направлении Z;
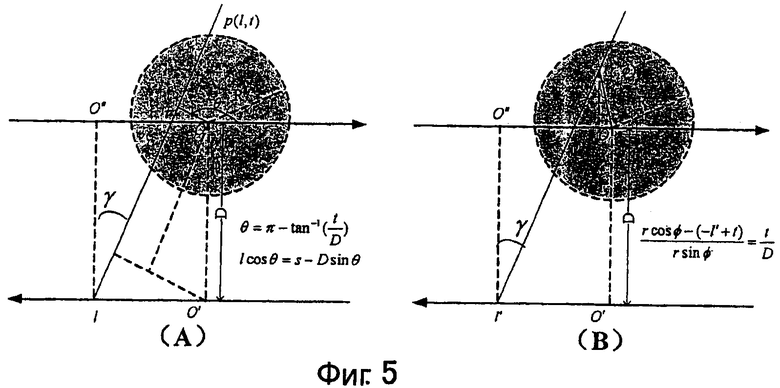
фиг.5 - схематическое графическое представление, предназначенное для пояснения геометрических соотношений процедуры линейного обратного проецирования отфильтрованных данных при прямолинейной траектории согласно настоящему изобретению;
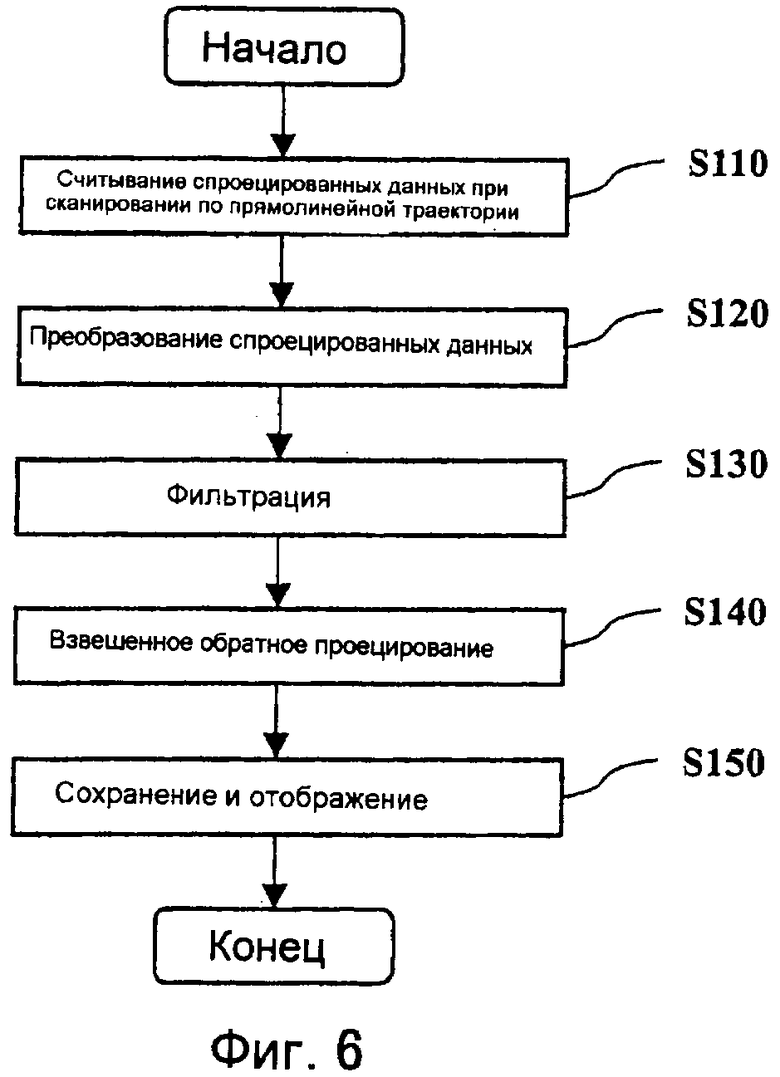
фиг.6 - схема последовательности операций способа обратного проецирования отфильтрованных данных при прямолинейной траектории; и
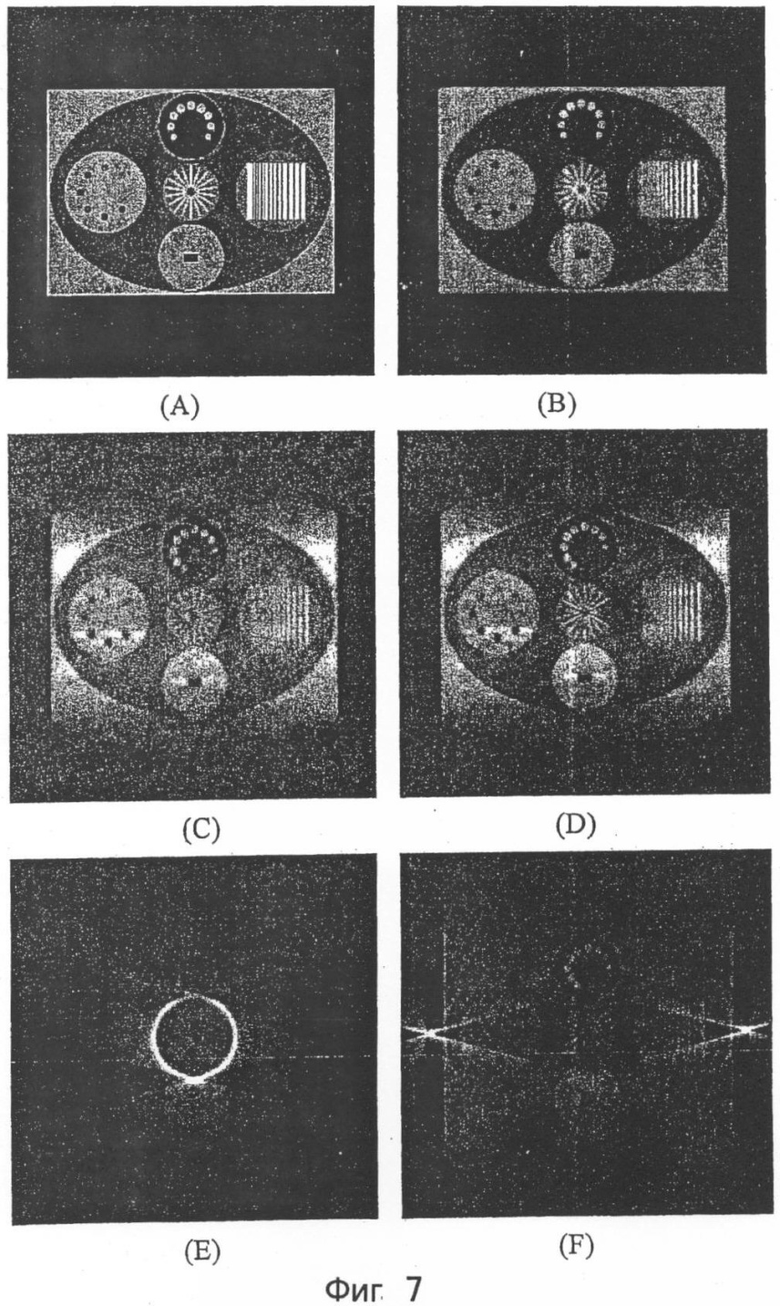
фиг.7 - сравнительные характеристики численно инициированных изображений (в плоскости X-Y), полученных путем реконструкции данных, собранных посредством системы формирования стереоскопического изображения с помощью изобретательского способа и способа ребининга в параллельный пучок.
Подробное описание предпочтительных вариантов осуществления
Ниже со ссылкой на сопровождающие чертежи будут описаны варианты осуществления настоящего изобретения.
На фиг.1 представлена в плане схема сканирования по прямолинейной траектории в системе формирования изображения согласно настоящему изобретению. На фиг.2 представлена структурная схема системы формирования изображения согласно настоящему изобретению.
Как показано на фиг.1, досматриваемый объект перемещается между источником А излучения и детектором по прямой линии. Во время перемещения источник А излучения в соответствии с командами с управляющей системы испускает излучения, которые проникают сквозь досматриваемый объект. Детектор принимает проходящие сигналы, собирает спроецированные данные под управлением управляющей системы и сохраняет спроецированные данные в запоминающем устройстве.
Система формирования изображения, показанная на фиг.2, содержит: источник 110 излучения, который представляет собой, например, ускоритель рентгеновского излучения, рентгеновскую трубку или источник радиоизотопов и т.д. и выбирается в соответствии с размером досматриваемого объекта 120 и условий применения; устройство 130 транспортировки для устойчивой поддержки и транспортировки досматриваемого объекта 120 и осуществления перемещения досматриваемого объекта по прямой линии; детекторную матрицу 140, которая содержит множество детекторных элементов и размещена напротив источника 110 излучения и является вертикальной по отношению к устройству 130 транспортировки, и имеет горизонтальный диапазон углов проекции, составляющий больше, чем 90°, относительно источника 110 излучения, например, от 90 до 180°, и охватывает объект в вертикальном направлении, может быть планарным детектором или коллинеарным детектором; шину 150 сигналов управления и данных, предназначенную для передачи сигналов управления и данных; и блок 160 управления и обработки изображения, соединенный с источником 110 излучения, устройством 130 транспортировки и детекторной матрицей 140, который управляет устройством 130 транспортировки с целью перемещения по прямой линии и посылает команды источнику 110 излучения на испускание излучений, управляет детекторной матрицей 140 с целью приема проходящих сигналов и формирования спроецированных данных и осуществляет вторичную обработку спроецированных данных.
Поэтому досматриваемый объект 120 равномерно перемещается в соответствии с прямолинейной траекторией сканирования, показанной на фиг.1, и для получения спроецированных данных посредством детекторной матрицы 140 синхронно и с постоянным временным интервалом берутся выборки.
На фиг.3 представлена функциональная схема блока 160 управления обработки изображения в системе формирования изображения, показанной на фиг.2. Как показано на фиг.3, блок 160 управления и обработки изображения включает в себя запоминающее устройство 161, которое представляет собой запоминающую среду, такую как жесткий диск и т.п., предназначенную для сохранения данных; устройство 162 ввода, которое представляет собой средство ввода, такое как клавиатура, для содействия пользователю в вводе входных параметров или команд; контроллер 163, предназначенный для того, чтобы после того, как пользователь ввел команду с помощью устройства 162 ввода, осуществлять подачу команд устройству 130 транспортировки на осуществление равномерного перемещения досматриваемого объекта 120 по прямой линии и блоку 110 формирования излучения, и детекторной матрице 140 (блоку сбора данных) на начало работы для получения спроецированных данных; внутреннюю шину 164 для соединения всех блоков и передачи управляющих сигналов и данных; и блок 165 реконструкции изображения для осуществления реконструкции относительно спроецированных данных, полученных блоком 140 сбора данных.
Процесс реконструкции изображения будет описан подробно со ссылкой на фиг.4. На фиг.4 представлен схематический чертеж, иллюстрирующий геометрические отношения между эквивалентным детектором (реальный детектор воображается на центральной линии линейного перемещения объекта) и точкой реконструируемого объекта в направлении Z.
В предположении, что приближенная оценка функции  досматриваемого объекта обозначена как
досматриваемого объекта обозначена как  является верным следующее уравнение:
является верным следующее уравнение:





В данном случае детекторные элементы в детекторной матрице размещены с постоянным интервалом размещения, и данные p(l,t,z) обозначают спроецированное значение с координатой t в срезе z детекторной матрицы, когда досматриваемый объект 120 перемещается к координате l на линии. Следует отметить, что t и z представляют собой эквивалентные значения каждого детекторного элемента детекторной матрицы на центральной линии линейного перемещения объекта.
Кроме того, в уравнениях (1)-(4) D обозначает расстояние от источника излучения в блоке 110 формирования излучения до центральной линии линейного перемещения. ±tm характеризует минимальное и максимальное положения детекторной матрицы по направлению оси X; h представляет собой ядро свертки, а его теоретическое значение равно  обычно используют ядро S-L-типа, при этом дискретная форма этого ядра имеет вид:
обычно используют ядро S-L-типа, при этом дискретная форма этого ядра имеет вид:
 ,
,
Поэтому в секции 1651 преобразования спроецированных данных блока 165 реконструкции изображения осуществляются обращение и сдвиг спроецированных данных p(l,t,z) для получения q(l,t,z), где q(l,t,z) обозначает спроецированные данные при сканировании квазипараллельным пучком. Значение термина «сканирование квазипараллельным пучком» заключается в том, что для соответствующих углов эквивалентные выборочные интервалы детекторных элементов являются различными, и сканируемые угловые выборки также могут не быть равномерными.
Далее, для получения отфильтрованных спроецированных данных Q(l',t,z) в секции 1652 фильтрации осуществляется одномерная свертка спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком с ядром h свертки по направлению l.
Затем для получения реконструированного изображения в секции 1653 обратного проецирования осуществляется обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',t,z) по направлению проекции излучения.
Здесь необходимо отметить, что задача обращения и сдвига заключается в преобразовании спроецированных данных от сканирования по прямолинейной траектории в спроецированные данные при сканировании квазипараллельным пучком. Сканирование квазипараллельным пучком не является сканированием параллельным пучком в типовой компьютерной томографии, поскольку для каждого из соответствующих углов эквивалентные выборочные интервалы детекторных элементов являются различными, и угловые выборки также могут не быть равномерными.
Кроме того, задача фильтрации в случае ядра h свертки является такой же, как в типовом алгоритме реконструкции с обратным проецированием отфильтрованных данных, при этом реконструированное изображение может быть получено по отфильтрованным спроецированным данным Q(l',t,z) после взвешенного обратного проецирования.
Поэтому в настоящем изобретении фильтрация осуществляется по направлению l сбора данных, а обратное проецирование осуществляется по направлению излучения. По сравнению с алгоритмом ребининга (перегруппировки участков мгновенного снимка динамического изображения) в параллельный пучок и стандартным алгоритмом обратного проецирования отфильтрованных данных при параллельном пучке в настоящем изобретении можно полностью использовать все достоверные данные, повысить пространственное разрешение изображения, и имеется меньшая чувствительность к усечению данных, чем в случае алгоритма ребининга в параллельный пучок.
Ниже со ссылками на фигуры 1, 4 и 5 будет получено приведенное выше уравнение (1). До получения его сначала будет описана процедура ребининга данных линейного сканирования в данные сканирования параллельным пучком.
В соответствии с режимом сканирования, показанным на фиг.1, каждый детектор соответствует одному углу проекции, и перемещение объекта f(x,y) эквивалентно сканированию параллельным пучком при этом угле. С учетом схематического графического представления проецирования из фиг.5 применительно к матрице детекторов, расположенных с постоянным интервалом разнесения, формула для ребининга данных линейного сканирования в данные сканирования параллельным пучком имеет вид:
 .
.
Здесь  отображает спроецированные данные с углом θ проекции и расстоянием s от центра вращения при сканировании параллельным пучком. p(l,t) обозначает спроецированные данные на детекторной матрице, когда досматриваемый объект совершает относительное перемещение к координате l на линии.
отображает спроецированные данные с углом θ проекции и расстоянием s от центра вращения при сканировании параллельным пучком. p(l,t) обозначает спроецированные данные на детекторной матрице, когда досматриваемый объект совершает относительное перемещение к координате l на линии.
С помощью уравнения (6) может быть осуществлен ребининг спроецированных данных сканирования по прямолинейной траектории в спроецированные данные сканирования параллельным пучком. Однако, поскольку в практических системах бесконечная прямая линия невозможна, подвергнутые ребинингу данные не являются данными сканирования параллельным пучком из 180° углов проекции. Иначе говоря, данных недостаточно для точной реконструкции.
Что касается сканирования по прямолинейной траектории, то, хотя выборки l и t могут быть равномерными, выборки угла θ проекции и местоположения s детектора при соответствующем сканировании параллельным пучком не являются равномерными. Поэтому для процедуры ребининга необходимы интерполяции по угловому направлению и направлению детектора, которые приводят к ухудшению пространственного разрешения при реконструкции.
Далее будет описан процесс реконструкции согласно настоящему изобретению, состоящий из непосредственной фильтрации и обратного проецирования данных линейного сканирования.
Формула для реконструкции путем обратного проецирования отфильтрованных данных при сканировании параллельным пучком имеет вид:

С учетом бесконечной прямолинейной траектории и разнесенных на равные расстояния детекторов при использовании уравнения (7) (θ,s) заменяется на (l,t), так что:

Здесь 
Можно доказать следующее:

Здесь 
При сканировании с прямолинейной траекторией  заменяется на p(l,t). Кроме того, в соответствии с геометрическим построением из фиг.5 может быть получен следующий результат:
заменяется на p(l,t). Кроме того, в соответствии с геометрическим построением из фиг.5 может быть получен следующий результат:
Здесь  , и оно отражает местоположение пространственных выборок спроецированных данных, пересекающее точку (r, φ) и элемент t детектора при линейном сканировании.
, и оно отражает местоположение пространственных выборок спроецированных данных, пересекающее точку (r, φ) и элемент t детектора при линейном сканировании.
При подстановке уравнения (10) в уравнение (9), использовании уравнения  и замене l=l-t, l'=l'-t получается формула (8) реконструкции.
и замене l=l-t, l'=l'-t получается формула (8) реконструкции.
В случае уравнения (8) при подстановке q(l,t)=p(-l+t,t) в уравнение (8) получаем
 .
. (11)
(11)
Здесь Q(l',t)=∫q(l,t)h(l'-l)dl.
На самом деле, если диапазон прямолинейной траектории составляет [-L, L], а охват детектора составляет [-tm, tm], то изображение, реконструированное в соответствии с уравнением (8), не является точно f(x,y), а только приближением этой функции. Кроме того, при рассмотрении трехмерной ситуации приближенная оценка  досматриваемого объекта f(x,y,z) может быть выражена уравнением (1).
досматриваемого объекта f(x,y,z) может быть выражена уравнением (1).
На фиг.6 показана схема последовательности операций способа обратного проецирования отфильтрованных данных при прямолинейной траектории согласно настоящему изобретению. Как показано на фиг.6, после того, как детекторной матрицей 140 получены спроецированные данные и эти данные сохранены в запоминающем устройстве 161, то, когда изображение подлежит реконструкции, на этапе S110 спроецированные данные p(l,t,z), сканированные по прямолинейной траектории, считывают из запоминающего устройства.
Затем на этапе S120 посредством секции 1651 преобразования спроецированных данных осуществляют обращение и сдвиг спроецированных данных p(l,t,z) для получения q(l,t,z), где q(l,t,z) обозначают спроецированные данные при сканировании квазипараллельным пучком.
После этого на этапе S130 посредством секции 1652 фильтрации осуществляют одномерную свертку спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком с ядром h свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',t,z).
Далее на этапе S140 посредством секции 1653 обратного проецирования осуществляют обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',t,z) по направлению проекции излучения для получения реконструированного изображения.
На этапе S150 реконструированное изображение сохраняют в запоминающем устройстве 161 или отображают на экране дисплея 170.
Формула (1) для фильтрации обратного проецирования и реконструкции прямолинейной траектории получена выше для изобретательского способа реконструкции изображения применительно к случаю компоновки с разнесенными на одинаковые расстояния детекторными элементами. На самом деле детекторные элементы в детекторной матрице также могут быть размещены через равные углы. Если детекторные элементы размещены через равные углы, то по аналогии с приведенным выше выводом формула для фильтрации обратного проецирования и реконструкции может быть изменена и будет:

где



В данном случае детекторные элементы в детекторной матрице размещены через равные углы, а данные p(l,γ,z) обозначают спроецированное значение при угловом положении γ на срезе z детекторной матрицы, когда досматриваемый объект 120 перемещается к координате l на линии. Следует отметить, что γ и z представляют собой эквивалентные значения детекторной матрицы на центральной линии линейного перемещения объекта. Обозначение ±γm отражает минимальный и максимальный углы детекторной матрицы по направлению оси X.
Поэтому в случае детекторных элементов, разнесенных на одинаковые углы, процедура прямолинейной фильтрации, обратного проецирования и реконструкции является такой же, как указанная выше, в которой операция обращения и сдвига осуществляется в соответствии с уравнением (14), при этом значение оператора свертки является тем же самым, как и в случае разнесения на одинаковые расстояния.
Иначе говоря, в секции 1651 преобразования спроецированных данных спроецированные данные p(l,γ,z) обращаются и сдвигаются для получения q(l,γ,z), при этом спроецированные данные p(l,γ,z) обозначают спроецированное значение при угловом положении γ в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии.
Для получения отфильтрованных спроецированных данных Q(l',γ,z) в секции 1652 фильтрации осуществляется одномерная свертка спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком с ядром h свертки по направлению l.
Для получения реконструированного изображения в секции 1653 обратного проецирования осуществляется обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',γ,z) по направлению проекции излучения.
Для точной реконструкции изображений в радиографической системе должно обеспечиваться точное измерение или масштабирование следующих системных параметров: расстояния Т от источника излучения до детекторной матрицы; расстояния D от источника излучения до центральной линии линейного перемещения; скорости v линейного перемещения устройства транспортировки; выборочного временного интервала Δt детекторной матрицы; физических размеров детектора, в том числе физических размеров одного детекторного элемента и физических размеров детекторной матрицы и т.п.
На фиг.7 представлены сравнительные характеристики инициированных томографических изображений (в плоскости X-Y), полученных путем реконструкции данных, собранных посредством системы формирования изображения, с помощью изобретательского способа и алгоритма ребининга в параллельный пучок, при этом выбран диапазон углов горизонтальной проекции, составляющий 150°. Детекторный элемент имеет ширину 6 мм, при этом они размещены с равными промежутками. Эквивалентный пространственный выборочный интервал детекторной матрицы составляет 3 мм.
Реконструированное изображение имеет 300×300 пикселов, а размеры каждого пиксела 3 мм × 3 мм. На этой фигуре представлены результаты, инициированные с использованием модели багажа, в которой реконструирован центральный срез, при этом на (А) представлено оригинальное изображение модели, на (В) представлено точное реконструированное изображение при сканировании параллельным пучком, на (С) представлено изображение, реконструированное по спроецированным данным, сканированным по прямолинейной траектории, с помощью способа перекомпоновки в параллельный пучок, на (D) представлено изображение, реконструированное с помощью изобретательского способа, на (Е) представлено еще одно изображение, реконструированное с помощью способа ребининга в параллельный пучок в случае усечения данных по направлению детектора, и на (F) представлено еще одно изображение, реконструированное изобретательским способом, для случая усечения данных по направлению детектора. Как видно на фиг.7, по сравнению со способом ребининга в параллельный пучок изобретательский способ существенно повышает пространственное разрешение и уменьшает влияние усечения данных.
Ранее настоящее изобретение было описано применительно к его предпочтительным вариантам осуществления. Специалистам в данной области техники должно быть понятно, что многочисленные изменения, замены и дополнения возможны без отступления от сущности и объема настоящего изобретения. Поэтому объем изобретения не должен толковаться ограничительно в связи с приведенными выше конкретными вариантами осуществления, а должен быть ограничен прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ФОРМИРОВАНИЯ ИЗОБРАЖЕНИЯ | 2006 |
|
RU2343458C2 |
| УСТАНОВКА ДЛЯ ДОСМОТРА ГРУЗОВ | 2007 |
|
RU2386954C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ ПРОСВЕЧИВАНИЯ ИЗЛУЧЕНИЕМ ПОД РАЗНЫМИ УГЛАМИ | 2007 |
|
RU2400735C2 |
| СИСТЕМЫ СПИРАЛЬНОЙ КТ И СПОСОБЫ РЕКОНСТРУКЦИИ | 2015 |
|
RU2595312C1 |
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЙ, УСТРОЙСТВО ОБРАБОТКИ ИЗОБРАЖЕНИЙ И НОСИТЕЛЬ ДАННЫХ | 2018 |
|
RU2709437C1 |
| СПОСОБ КАЛИБРОВКИ НА ОСНОВЕ АЛГОРИТМА НАХОЖДЕНИЯ ЦЕНТРА ВРАЩЕНИЯ ДЛЯ КОРРЕКЦИИ КОЛЬЦЕВЫХ АРТЕФАКТОВ В НЕИДЕАЛЬНЫХ ИЗОЦЕНТРИЧЕСКИХ ТРЕХМЕРНЫХ ВРАЩАТЕЛЬНЫХ РЕНТГЕНОВСКИХ СКАНИРУЮЩИХ СИСТЕМАХ С ИСПОЛЬЗОВАНИЕМ КАЛИБРОВОЧНОГО ФАНТОМА | 2009 |
|
RU2526877C2 |
| ТОМОГРАФИЧЕСКИЙ АППАРАТ И СПОСОБ РЕКОНСТРУКЦИИ ЕГО ТОМОГРАФИЧЕСКОГО ИЗОБРАЖЕНИЯ | 2015 |
|
RU2655091C2 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ СПИРАЛЬНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2396551C1 |
| СИСТЕМА МНОГОКАДРОВОЙ МАГНИТНО-РЕЗОНАНСНОЙ (МР) ТОМОГРАФИИ И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 2015 |
|
RU2697994C2 |
| СТАЦИОНАРНОЕ УСТРОЙСТВО КОМПЬЮТЕРНОЙ ТОМОГРАФИИ | 2013 |
|
RU2566525C2 |
Использование: для реконструирования трехмерного изображения посредством сканирования по прямолинейной траектории. Сущность: заключается в том, что реконструирование изображения при трехмерной стереографии производится путем использования сканирования по прямолинейной траектории, осуществляя преобразование спроецированных данных от сканирования по прямолинейной траектории в спроецированные данные при сканировании квазипараллельным пучком, а также осуществляя фильтрацию с получением отфильтрованных спроецированных данных путем свертки спроецированных данных при сканировании квазипараллельным пучком с предварительно определенным ядром свертки, после чего выполняется обратное проецирование для реконструкции изображения путем обратного проецирования с весовым коэффициентом отфильтрованных спроецированных данных. Технический результат: повышение скорости сканирования при трехмерной стереографии. 2 н. и 10 з.п. ф-лы, 7 ил.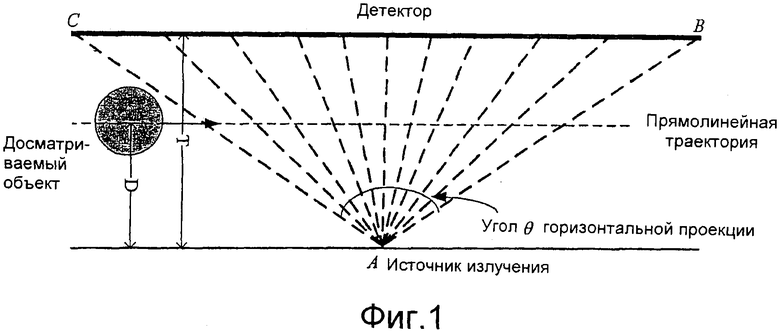
секцию преобразования спроецированных данных для преобразования спроецированных данных от сканирования по прямолинейной траектории в спроецированные данные при сканировании квазипараллельным пучком;
секцию фильтрации для получения отфильтрованных спроецированных данных путем свертки спроецированных данных при сканировании квазипараллельным пучком с предварительно определенным ядром свертки; и
секцию обратного проецирования для реконструирования изображения путем обратного проецирования с весовым коэффициентом отфильтрованных спроецированных данных.
в секции преобразования спроецированных данных осуществляются обращение и сдвиг спроецированных данных p(l,t,z) для получения спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,t,z) обозначают спроецированное значение с координатой t в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии;
в секции фильтрации осуществляется одномерная свертка спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',t,z);
в секции обратного проецирования осуществляется обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',t,z) по направлению проекции излучения для получения реконструированного изображения.
в секции преобразования спроецированных данных осуществляются обращение и сдвиг спроецированных данных р(l,γ,z) для получения спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,γ,z) обозначают спроецированное значение при угловом положении γ в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии;
в секции фильтрации осуществляется одномерная свертка спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',γ,z);
в секции обратного проецирования осуществляется обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',γ,z) по направлению проекции излучения для получения реконструированного изображения.
этап преобразования спроецированных данных для преобразования спроецированных данных от сканирования по прямолинейной траектории в спроецированные данные при сканировании квазипараллельным пучком;
этап фильтрации для получения отфильтрованных спроецированных данных путем свертки спроецированных данных при сканировании квазипараллельным пучком с предварительно определенным ядром свертки; и
этап обратного проецирования для реконструкции изображения путем обратного проецирования с весовым коэффициентом отфильтрованных спроецированных данных.
на этапе преобразования спроецированных данных осуществляют обращение и сдвиг спроецированных данных p(l,t,z) для получения спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,t,z) обозначают спроецированное значение с координатой t в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии;
на этапе фильтрации осуществляют одномерную свертку спроецированных данных q(l,t,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',t,z);
на этапе обратного проецирования осуществляют обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',t,z) по направлению проекции излучения для получения реконструированного изображения.
на этапе преобразования спроецированных данных осуществляют обращение и сдвиг спроецированных данных p(l,γ,z) для получения спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком, при этом спроецированные данные p(l,γ,z) обозначают спроецированное значение при угловом положении γ в срезе z детекторной матрицы, когда досматриваемый объект относительно перемещается к координате l на линии;
на этапе фильтрации осуществляют одномерную свертку спроецированных данных q(l,γ,z) при сканировании квазипараллельным пучком с предварительно определенным ядром свертки по направлению l для получения отфильтрованных спроецированных данных Q(l',γ,z);
на этапе обратного проецирования осуществляют обратное проецирование с весовым коэффициентом отфильтрованных спроецированных данных Q(l',γ,z) по направлению проекции излучения для получения реконструированного изображения.
| Вычислительный томограф | 1980 |
|
SU972346A1 |
| Томографическое вычислительное устройство | 1980 |
|
SU950204A3 |
| ЦИФРОВОЙ СКАНИРУЮЩИЙ РЕНТГЕНОДИАГНОСТИЧЕСКИЙ АППАРАТ | 2002 |
|
RU2217055C1 |
| US 2003219093 A1, 27.11.2003 | |||
| US 6560308 B1, 06.05.2003 | |||
| US 2004258194 A1, 23.12.2004 | |||
| US 4894775 A, 16.01.1990. | |||

