Изобретение относится к устройствам, предназначенным для распознания количества облачности по пространственно временной структуре излучения в видимой области, в частности, при морских наблюдениях общего балла облачности видимой полусферы неба.
Облачность - совокупность облаков, наблюдаемых в определенном месте (или территории) в определенный момент или период времени. Облачность - один из важных факторов, определяющих погоду и климат. Благодаря экранирующему эффекту она препятствует как охлаждению поверхности Земли за счет собственного теплового излучения, так и ее нагреву излучением Солнца, тем самым уменьшая сезонные и суточные колебания температуры воздуха.
При анализе телевизионных снимков не всегда удается точно определить формы морфологической классификации облаков из-за фотографического сходства большинства из них между собой. Поэтому при дешифрировании пользуются условной классификацией, составленной с учетом информативных возможностей фотографии. Выделяются следующие основные типы облачности, каждый из которых может включать в себя не только соответствующие формы морфологической классификации - кучевые, слоистые, перистые и др., но и всевозможные разновидности всех ярусов, создающих на снимках сходный зрительный эффект: перисто-образные, слоистообразные, кучево-образные, кучево-дождевые или мощные кучевые, слоисто-кучевообразные, различные сочетания указанных типов. Кроме основных типов облачности, при дешифрировании определяются границы однородных облачных полей и количество облачности. Границей (контуром) называется линия раздела между полями с различными характеристиками. Контурами очерчиваются районы (поля), однородные по яркости и структуре изображения облачности. Количество облачности характеризует степень (коэффициент) покрытия облаками того или иного участка земной поверхности и определяется отношением (в процентах) площади, занятой облачными элементами внутри контура, ко всей площади, ограниченной контуром.
Известны правила и условия проведения наблюдений за облачностью. При этом на всех основных метеорологических станциях наблюдения производятся вединые синхронные сроки наблюдений: 0, 3, 6, 9, 12, 15, 18 и 21 ч. московского времени. Существенный недостаток этой методики состоит в том, что все наблюдения производятся визуально и, следовательно, обладают низкой точностью, связанной с субъективной оценкой наблюдателем количества облаков. Также предложенная методика подразумевает ведение наблюдений между сроками в условиях быстрого изменения облачности, что или нереально при использовании визуального подхода, или предполагает использование очень больших человеческих ресурсов. Наконец, визуальные наблюдения не дают возможности накопления архивных данных. («Наставления гидрометеорологическим станциям и постам» (выпуск 3, часть 1, Гидрометеоиздат, Ленинград, 1985 г.), глава 16 «Наблюдение за облаками»).
Существенный недостаток этого технического решения состоит в том, что все наблюдения производятся визуально с субъективной оценкой наблюдателя. Также методика подразумевает ведение наблюдений с уменьшенным периодом в условиях быстрого изменения облачности, что подразумевает нерациональное использование трудовых ресурсов. Кроме того, практика визуальных наблюдений не подразумевает возможности накопления архивных данных в виде изображений видимой полусферы неба.
Известно устройство, предназначенное для распознавания форм и количества облачности по ее пространственно-временной структуре излучения в инфракрасной области. Техническим результатом от реализации данного изобретения является повышение быстродействия устройства и возможность регистрации полусферического с перестраиваемым разрешением изображения поля излучения облачности для ее распознавания по пространственной структуре. Устройство распознавания форм облачности содержит радиометр, сканирующую систему, систему регистрации и обработки данных (блок регистрации). Сканирующая система выполнена в виде вращающегося вокруг оптической оси по образующей конуса зеркала с изменяющимся углом между оптической осью и его плоскостью (зенитным углом) и проецирующее на приемное устройство радиометра полусферическое с перестраиваемым угловым разрешением изображение поля излучения облачности, при этом зеркало выполнено с возможностью работы в следующем режиме: осуществляют полное круговое сканирование по азимутальному углу при заданном значении зенитного угла, поэтапно изменяют значение зенитного угла и проводятполное круговое сканирование по азимутальному углу при каждом из вновь установленных значений зенитного угла (RU №2331853).
Недостатками известного устройства являются недостаточные достоверность результатов и надежность в связи с наличием сканирующего устройства, включающего механически вращающиеся детали, и узость функциональных возможностей, обусловленная отсутствием возможности работы в видимом диапазоне излучений при морских наблюдениях общего балла облачности видимой полусферы неба и невозможностью ведения архивной записи облачности в момент наблюдений.
Известно техническое решение (применяемое до настоящего времени на практике) AUTOMATIC TOTAL SKY IMAGER MODEL TSI-880 («Автоматическое устройство съемки небосвода»), http://yesinc.com/products/data/tsi880/tsi-880ds.pdf), описанный, в том числе, в работе S.V. Zuev, A.A. Tikhomirov "Cloudiness monitoring for database of local weather", Proc. SPIE 6160, Twelfth Joint International Symposium on Atmospheric and Ocean Optics/Atmospheric Physics, 61600U (April 21, 2006); doi:10.1117/12.675238.
Недостатками этого технического решения являются
- низкая степень автоматизации не позволяющая сократить периодичность наблюдения;
- сложность конструкции, предусматривающей наличие систем слежения за положением Солнца;
- значительная погрешность измерения, обусловленная влиянием солнечной засветки, погрешностями слежения за положением Солнца с помощью конструктивно вынесенных систем слежения за положением Солнца и затеняющих его систем, а также субъективной оценкой визуального наблюдения за баллом облачности;
- значительная, - до 25%, погрешность измерения, обусловленная недостаточной достоверностью определения тонкой облачности;
- невозможностью управления режимами съемки в зависимости от положения в пространстве: устройство предназначено для установки на стабилизированной поверхности и не имеет технических средств для отслеживания изменения своего положения в пространстве.
Наиболее близким является известное техническое решение устройство определения общего балла облачности, содержащее широкоугольный объектив с углом поля зрения 180°, приемник излучения и блок хранения регистрации в цифровом виде, причем приемник излучения размещен со стороны, противоположной излучению облачности и выполнен в виде цифрового фотоаппарата, а в фокусе широкоугольного объектива находится матрица цифрового фотоаппарата, подключенного к цифровым входам-выходам блока хранения регистрации, выполненного в виде компьютера. Устройство установлено на судне в месте максимально свободном от затенения надстройками судна. Устройство выполнено с возможностью работы с видимым диапазоном излучения. Компьютер выполнен с установкой времени регистрации меньшей, чем стандартные сроки наблюдений. Устройство выполнено с возможностью сохранения фотографий в графическом формате для хранения фотоизображений и программной обработки пикселей изображения с получением информации о цифровой плотности синего и красного каналов для каждого пикселя (RU 2012108434, прототип).
Недостатками этого решения является значительная погрешность определения общего балла облачности, обусловленная следующими особенностями:
- регистрацией только части информации о цветовых координатах пикселей: красного и синего;
- невозможностью определения местоположения солнечного диска на снимке какми-либо технических средствами, что ведет к ошибочному завышению значения общего балла облачности за счет учета солнечного диска в качестве области, покрытой облаками;
- невозможностью фильтрации солнечной засветки, которая приводит к значительному, до 25%, ложному завышению значения общего балла облачности;
- недостаточной достоверностью определения тонкой облачности, что приводит к ложному занижению значения общего балла облачности;
- невозможностью управления режимами съемки: в условиях использования на судне устройство ведет съемку без привязки к горизонтальному положению камеры, что на этапе анализа снимков приводит к ложному снижению значения общего балла облачности.
Технической задачей изобретения является создание эффективного устройства для определения общего балла облачности на основе прямых цифровых широкоугольных снимков видимой полусферы неба и расширение арсенала устройств для определения общего балла облачности, основанных на оптическом наблюдении пространственно-временной структуры облачности в видимой области спектра.
Техническим результатом изобретения является повышение достоверности, объективности и точности определения общего балла облачного покрытия видимой полусферы неба, и возможность регистрации видимой пространственной структуры облачности в цифровом формате. Полностью исключается влияние солнечной засветки по двум параметрам:
- в плане классификации солнечного диска как области, покрытой облаками;
- в плане классификации частей снимка, засвеченной солнцем, как области,
покрытой облаками.
Кроме того, повышение достоверности, объективности и точности определения общего балла облачности обусловлено полным исключением субъективной оценка при визуальном наблюдении за баллом облачности.
Сущность изобретения состоит в том, что устройство для определения общего балла облачности на основе прямых цифровых широкоугольных снимков видимой полусферы неба содержит систему регистрации данных в виде цифровой камеры с широкоугольным объективом, выполненную с возможностью приема излучения оптического диапазона и блока контроля положения системы регистрации, включающий трехосевой датчик ускорения свободного падения, трехосевой датчик вращения и датчик географического положения, а также блок управления регистрацией и обработки данных, выполненный с возможностью обработки получаемых данных и хранения цифровых регистраций информации о закрытых и незакрытых облачностью участках видимой полусферы небосвода, при этом блок управления регистрацией данных связан цифровыми линиями связи с системой регистрации данных и с блоком контроля положения, которые жестко соединены между собой с образованием единой установки наружного монтажа.
Предпочтительно, система регистрации выполнена в виде цифровой камеры с разрешением 1920×1920рх, углом зрения около 180°, стандарта высокой четкости, с широкоугольным объективом типа «рыбий глаз», в фокусе широкоугольногообъектива размещена матрица цифровой камеры, подключенной цифровыми линиями к блоку управления регистрацией данных.
Причем установка наружного монтажа выполнена без выступающих и подвижных частей, при этом цифровая камера закреплена непосредственно на корпусе блока контроля положения системы регистрации, выполненном, например, в виде мини-компьютера в компактном ударопрочном пыле- влагозащищенном корпусе, а цифровые линии выполнены в виде единого кабеля.
Кроме того, установка наружного монтажа снабжена монтажной пластиной и средствами крепления к лееру верхней палубы морского судна в месте, максимально свободном от затенения надстройками судна.
Предпочтительно, блок управления регистрацией и обработки данных выполнен в виде персонального компьютера, содержащего систему хранения данных и систему управления регистрацией данных.
При этом блок управления регистрацией и обработки данных выполнен с возможностью приема данных положения и пространственной ориентации системы регистрации, управления режимами работы системы регистрации данных по результатам анализа ее положения и пространственной ориентации, приема снимков видимой полусферы неба с системы регистрации данных по цифровой линии связи и подавления солнечной засветки.
Одновременно блок управления регистрацией и обработки данных выполнен с возможностью хранения цифровых фотографий, программной обработки пикселей изображения с получением информации о цветовых координатах в цветовом пространстве RGB для каждого пикселя и разделением точек полученного поля индекса степени серости на три класса: «ОТКРЫТОЕ НЕБО», «ОБЛАКО» и «НЕ УЧАСТВУЕТ» для определения общего процента облачного покрытия и структуры облачности.
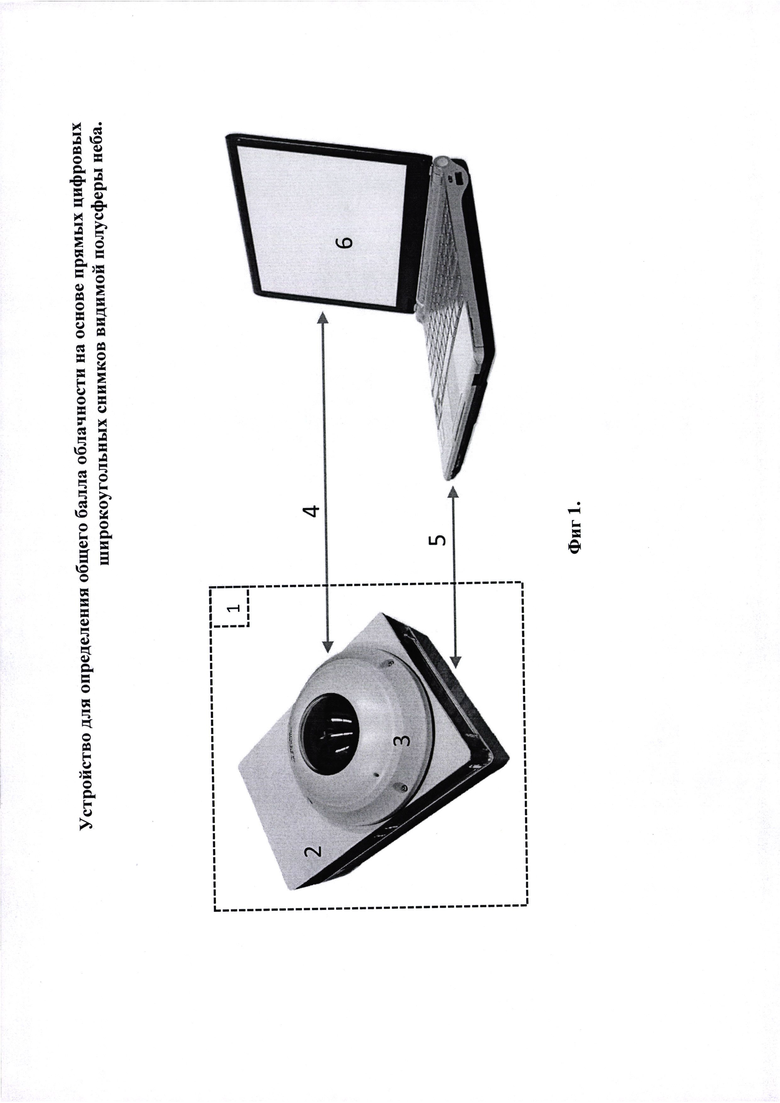
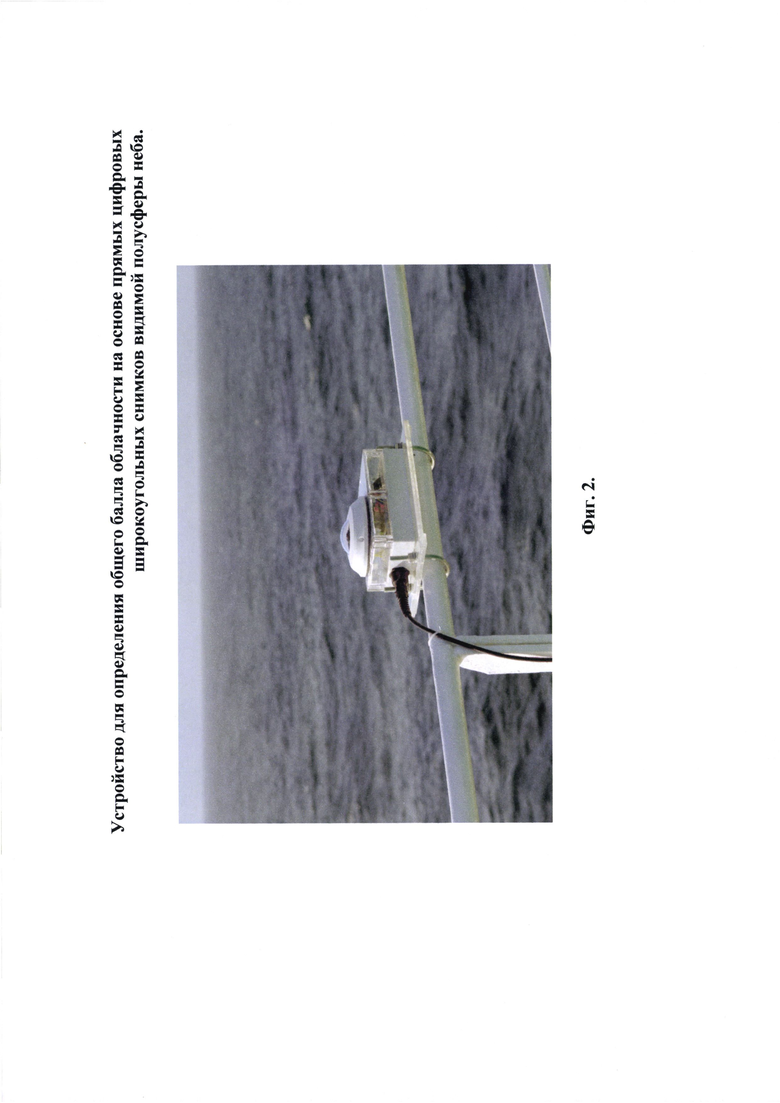
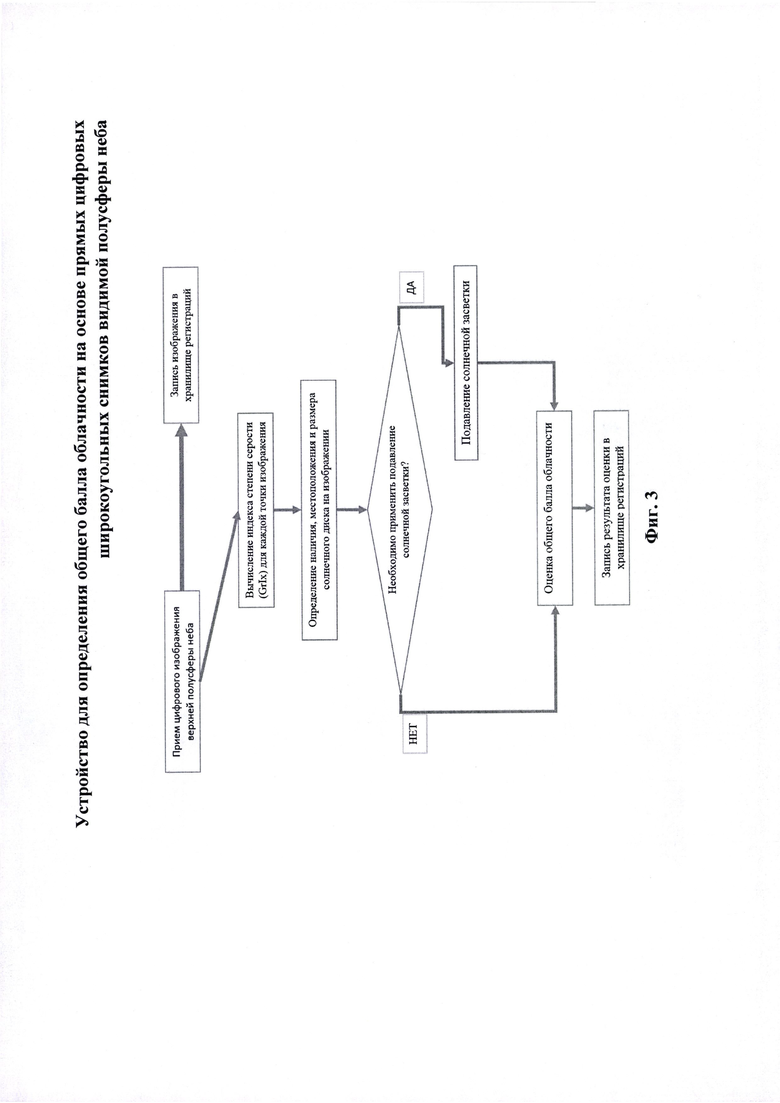
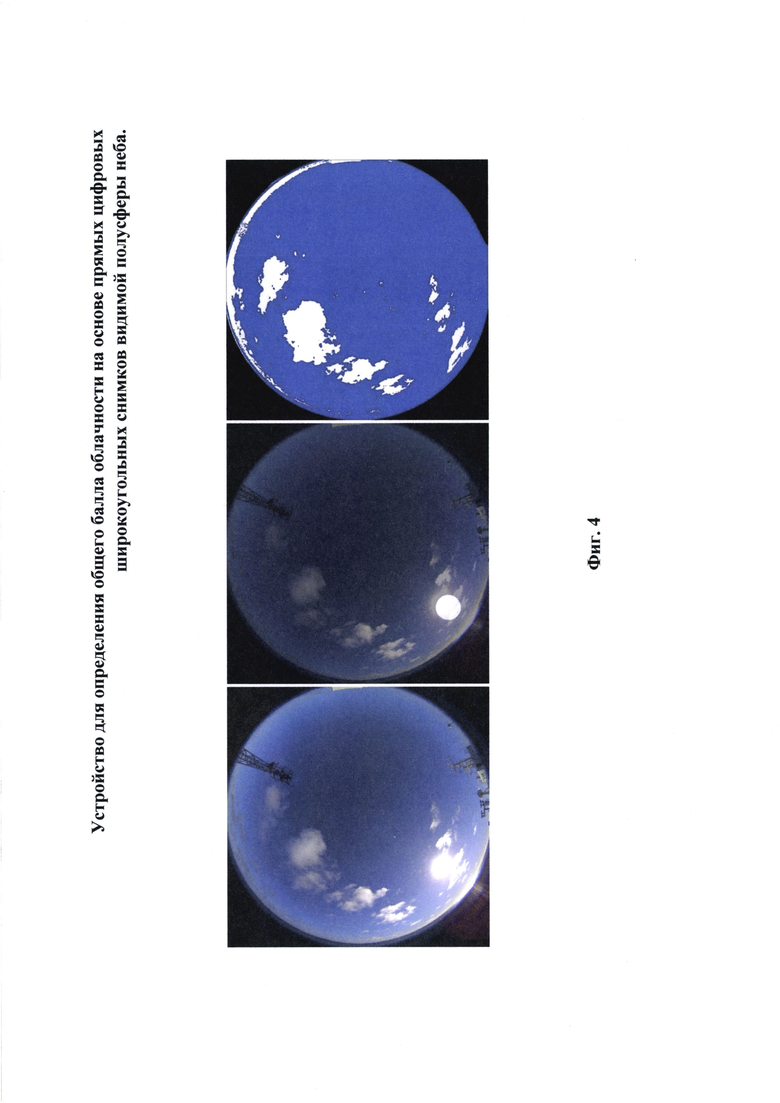
На чертеже фиг. 1 изображена принципиальная схема устройства для определения общего балла облачности на основе прямых цифровых широкоугольных снимков облачности, на фиг. 2 - внешний вид установки наружного монтажа, закрепленной на леере верхней палубы исследовательского судна, на фиг. 3 - общая блок-схема алгоритма оценки общего балла облачности по изображению верхней видимой полусферы неба, на фиг. 4 - пример регистрации структуры облачности, на фиг. 5 -примеры регистрации структуры облачности, в том числе в сложных метеоусловиях.
На чертежах обозначены блок 1 - установка наружного монтажа, блок 2 контроля положения системы 3 регистрации данных (цифровая камера 3 с широкоугольным объективом типа «рыбий глаз»), цифровые линии 4, 5 связи, блок 6 управления и обработки, выполненный в виде мини-компьютера в компактном ударопрочном пыле- влагозащищенном корпусе.
Конструктивно система 3 регистрации данных (цифровая камера) и блок 2 контроля положения системы регистрации выполнены заодно - в виде единой установки 1 - установки наружного монтажа (Фиг. 2). Установка 1 наружного монтажа выполнена без выступающих движущихся или статических частей, в ударопрочном корпусе. Цифровые линии 4, 5 связи конструктивно выполнены в виде единого кабеля. Установка 1 наружного монтажа, кабель цифровых линий 4, 5 связи и соединительные элементы выполнены с соблюдением стандарта пыле- и влагозащиты IP-67.
Устройство для определения общего балла облачности на основе прямых цифровых широкоугольных снимков видимой полусферы неба функционирует следующим образом.
Цифровой камерой 3 с широкоугольным объективом осуществляется прием излучения видимого оптического диапазона.
Широкоугольный объектив камеры 3 собирая излучение с видимой полусферы неба путем системы линз, находящихся в нем, проецирует видимую картину на поверхность (матрицу) приемника (цифровой камеры 3). Управление камерой 3 производится через цифровые входы-выходы блока 6, цифровые снимки видимой (верхней) полусферы неба поступают на блок 6. Камера 3 делает обычную цветную фотографию, которую сохраняет в один из популярных графических форматов, применяемый для хранения фотоизображений - JPEG. Структура файла формата JPEG позволяет легко программно работать по отдельности с каждым пикселем изображения и получать цветовые координаты в пространстве RGB (рекомендации Международного союза электросвязи №ITU-Rec.709) для каждого пикселя.
Использование широкоугольного объектива камеры 3 позволяет отказаться от механических перемещений камеры 3, как приемника излучения, и выполнить жесткую привязку полусферической пространственной структуры к линии горизонта. Это повышает надежность устройства в плавании, в полевых условиях, так как в ней нет подвижных элементов конструкции. Используется камера 3, выдающая снимки существенно более высокого разрешения: 1920×1920рх впредлагаемом изобретении против 512×582рх и 640×480рх в различных известных аналогах. Такое существенно повышенное разрешение снимков позволяет достигнуть достаточной точности определения расположения солнечного диска на снимке.
Блок 2 контроля положения системы 3 регистрации с помощью датчиков (трехосевой датчик ускорения свободного падения, трехосевой датчик вращения и датчик географического положения) обеспечивает получение реальных данных о местоположении (данные геолокации, точное время) и ориентации в пространстве системы 3 регистрации данных и установки 1 наружного монтажа в целом.
Поскольку конструктивно блок 2 контроля положения системы регистрации и цифровая камера 3 представляют собой единую установку 1 наружного монтажа, это позволяет принимать данные о местоположении и ориентации в пространстве блока 2 контроля положения системы регистрации за данные о местоположении и ориентации в пространстве всей установки 1 в целом.
Блок 6 управления и обработки работает в соответствии с блок-схемой, приведенной на фиг. 3 и выполняет функции:
- приема данных положения и пространственной ориентации системы регистрации;
- управления режимами работы системы регистрации данных по результатам анализа ее географического положения и пространственной ориентации;
- приема снимков видимой полусферы неба с системы регистрации данных по цифровой линии связи;
- обработки полученных снимков для определения общего процента облачного покрытия и структуры облачности;
- организации хранения полученных данных: цифровых снимков и результатов анализа снимков.
Оценка общего балла облачности осуществляется блоком 6 управления и обработки автоматически по набору статистических характеристик приходящего видимого излучения. Для проведения оценки разработан новый алгоритм обработки снимков верхней полусферы неба, обладающий точностью, значительно превышающей точность известных и распространенных алгоритмов.
В алгоритме оценки общего балла облачности используется индекс степени серости точки, определяемый по формуле:

где R,G,B - компоненты цифрового представления цвета точки в цветовом пространстве стандарта RGB (рекомендации Международного союза электросвязи №ITU-Rec.709), Y - общая яркость точки, а выражение StdDev(a,b,c,d,...) означает вычисление стандартного отклонения для ряда величин, передаваемых этой функции в качестве аргументов.
Блок алгоритма, определяющий наличие, местоположение и размер солнечного диска на изображении, выполнен в двух вариациях, которые выбираются автоматически:
- при наличии данных о географическом положении и ориентации системы регистрации данных;
- при отсутствии данных о географическом положении и ориентации системы регистрации данных.
Такая вариативность обеспечивает бесперебойную работу алгоритма оценки балла облачности в том числе при сбоях блока контроля положения системы регистрации.
Использование индекса степени серости позволяет повысить надежность детектирования структуры облачности, особенно в условиях тонкой облачности и низкой освещенности. Это, в свою очередь, позволяет увеличить точность оценки общего балла облачности в наиболее широком диапазоне освещенности и погодных условий как на суше, так и при применении изобретения в условиях метеостанции на борту судна.
Оценка необходимости применения подавления солнечной засветки производится исходя из наличия солнечного диска на полученном снимке и оценки искажений, вносимых влиянием солнечной засветки в поле индекса степени серости. Сама процедура подавления солнечной засветки предполагает:
- определение положения и размера солнечного диска на изображении;
- определение численных параметров влияния солнечной засветки на поле индекса степени серости;
- вычитание аддитивной составляющей искажений, вносимых солнечной засветкой в поле индекса степени серости и компенсация искажений, внесенных в значения индекса степени серости.
Применение, в случае необходимости, схемы подавления солнечной засветки позволяет увеличить точность оценки общего балла облачности как за счет исключения области расположения самого солнечного диска из числа классифицируемых как «ОБЛАКО», так и за счет компенсации влияния засветки на остальных участках снимка.
Кроме того, применение в блоке 6 схемы подавления солнечной засветки позволяет избежать использования конструктивно вынесенных систем слежения за положением Солнца и затеняющих его систем. Это позволяет значительно уменьшить габариты установки 1 наружного монтажа, а также избежать наличия выступающих и подвижных частей.
Данные, которые в режиме реального времени регистрируются блоком 2 контроля положения, передаются для обработки по цифровой линии 4 связи в блок 6 управления и обработки; управление регистрирующей системой производится по цифровой линии 5 связи с блока 6 управления и обработки.
Оценка общего балла облачности производится разделением точек полученного поля индекса степени серости на три класса: «ОТКРЫТОЕ НЕБО», «ОБЛАКО» и «НЕ УЧАСТВУЕТ». Точки, не принимаемые во внимание при оценке балла облачности, лежат за пределами области проекции видимой области на матрицу камеры и определяются геометрически на первоначальном этапе анализа изображения. Для каждого типа цифровой камеры, используемой в системе регистрации данных, проводятся предварительные исследования, которые позволяют определить значение GrIxm, используемое для классификации точек поля индекса степени серости на классы «ОТКРЫТОЕ НЕБО» и «ОБЛАКО». Значением по умолчанию, дающим наиболее точную оценку общего балла облачности для любых типов цифровых камер, является GrIxm=0.1
Точки поля, подчиняющиеся условию GrIx≥GrIxm, классифицируются как «ОБЛАКО», остальные участвующие в классификации точки классифицируются как «ОТКРЫТОЕ НЕБО». Общий балл облачности вычисляется целой частью отношения количества точек, классифицированных как «ОБЛАКО» к общему количеству точек, участвующих в оценке, умноженного на 10:
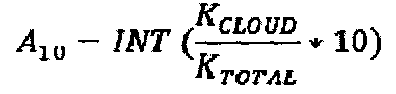
Приведение к целочисленному результату по шкале от 0 до 10 используется, поскольку согласно методике наблюдения за облаками «Количество облаков (облачность) оценивается в баллах; 1 балл составляет 0,1 часть всего небосвода».
Использование блока 2 контроля положения системы регистрации позволяет выполнить жесткую привязку регистрируемой полусферической пространственной структуры к линии горизонта, что повышает надежность системы в полевых условиях, особенно в условиях наблюдений на борту судна.
В примере регистрации структуры облачности на фиг. 4 представлен цифровой снимок верхней полусферы неба в видимой области спектра (слева).
Фиг. 4 представляет собой цветной снимок верхней видимой полусферы неба в оптическом диапазоне. Основная полезная часть снимка представляет собой цветной круг, вписанный в квадрат видимой области изображения. Область изображения, лежащая за пределами этого круга, не содержит полезной информации и заполнена черным цветом. Полезная область снимка изображает состояние небосвода на момент съемки, представляет собой голубой круг с белыми и серыми различной яркости облаками, белым пятном, представляющим солнечный диск, и некоторыми различных цветов объектами, являющимися отображением корабельных надстроек, попавших в поле зрения камеры. Изображение соответствует визуальному восприятию видимой полусферы неба наблюдателем;
- иллюстрация определения расположения и размера солнечного диска (в центре) - представляет собой затемненную копию оригинального снимка с ярко выделенным небольшим белым кругом, отмечающим положение и размер автоматически определенного диска солнца;
- иллюстрация классификации точек снимка. Представляет собой трехцветное изображение, по размеру полностью соответствующее оригинальному снимку. Основная область, содержащая полезную информацию, представляет собой круг, вписанный в квадрат видимой области изображения. Области изображения, лежащие за пределами этого круга, не имеют практического применения при анализе изображения, и обозначены черным цветом. Полезная часть изображения заполнена синим цветом в местах, идентифицированных как открытое небо, и белым цветом в местах, соответствующих наличию облаков на оригинальном изображении.
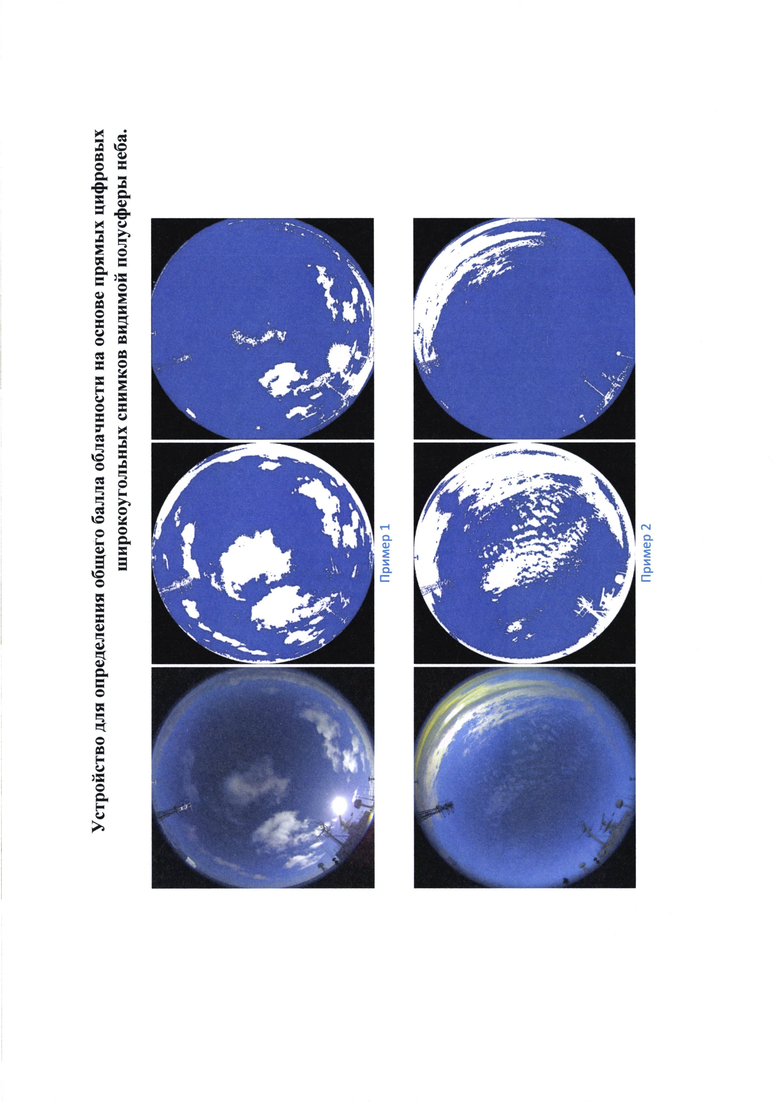
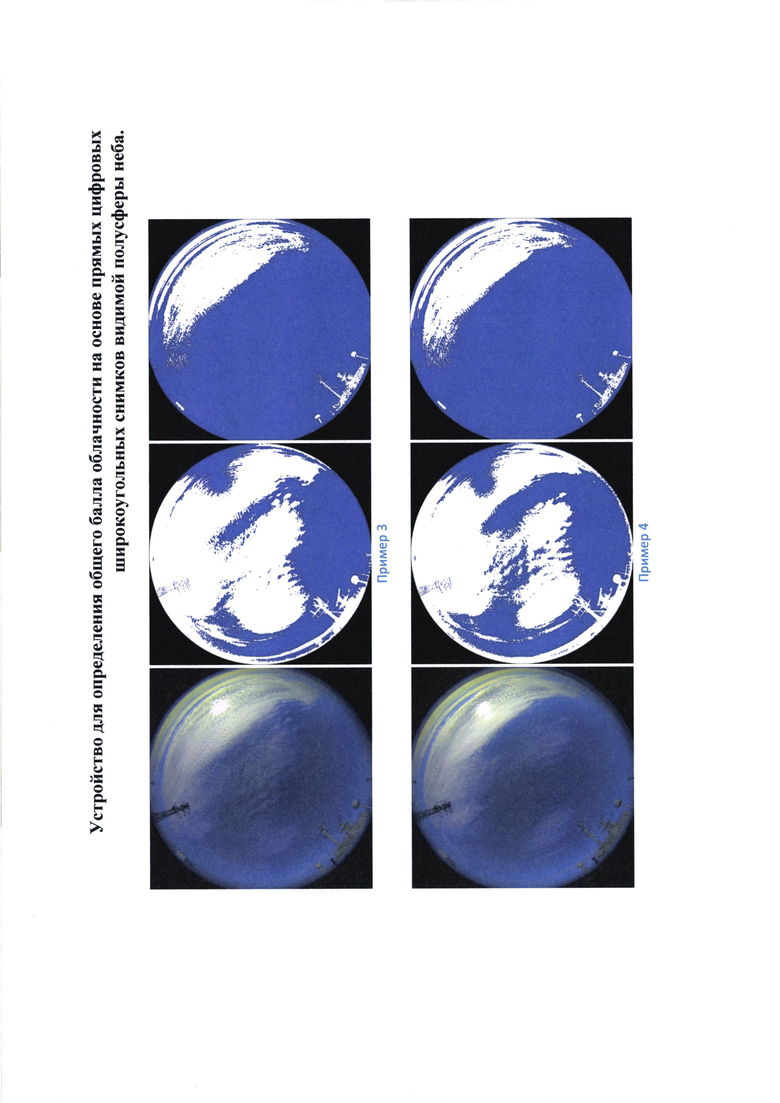
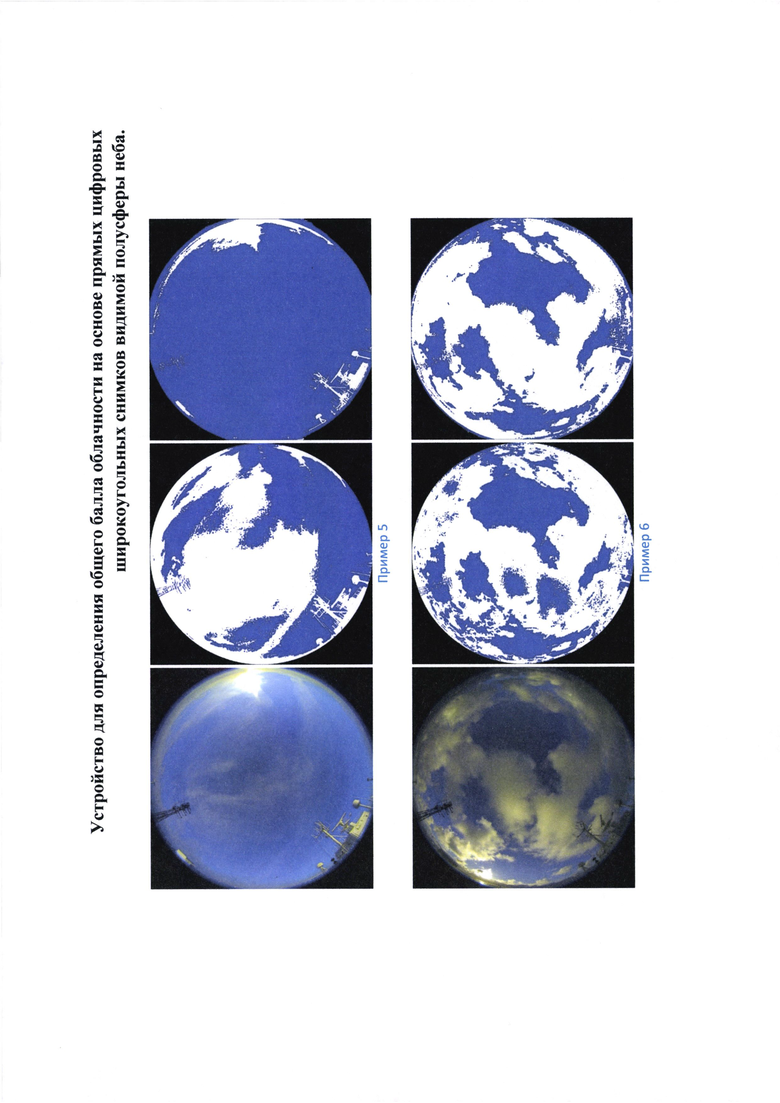
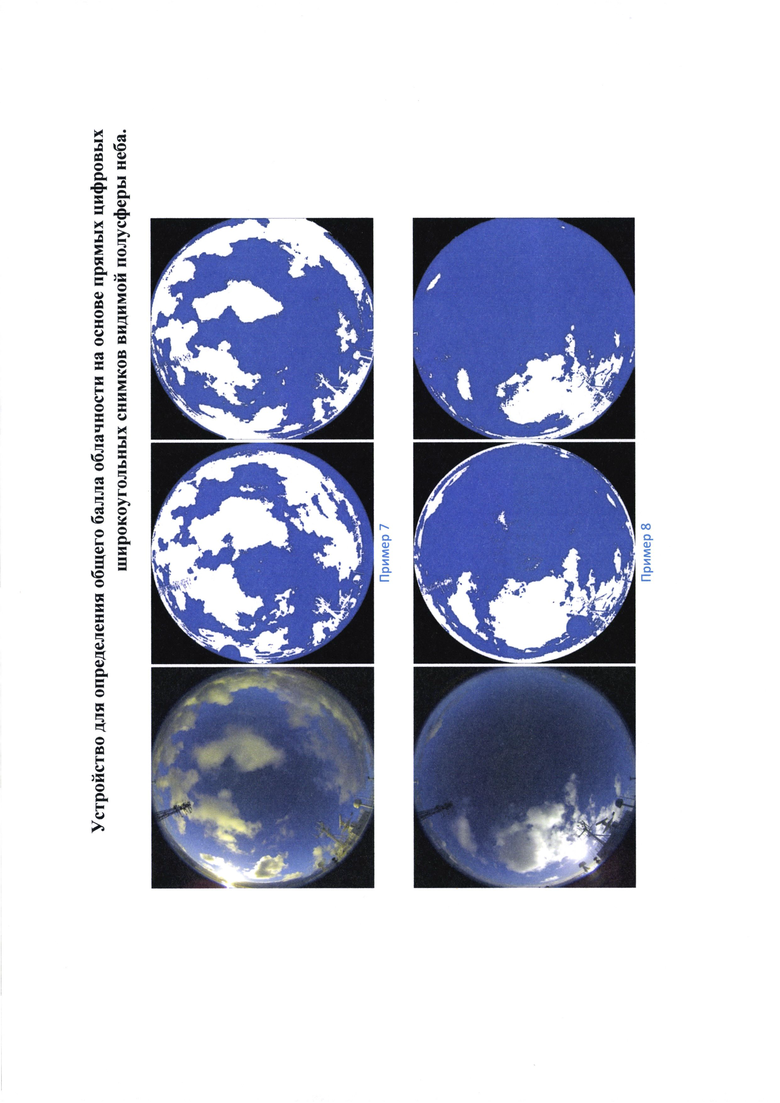
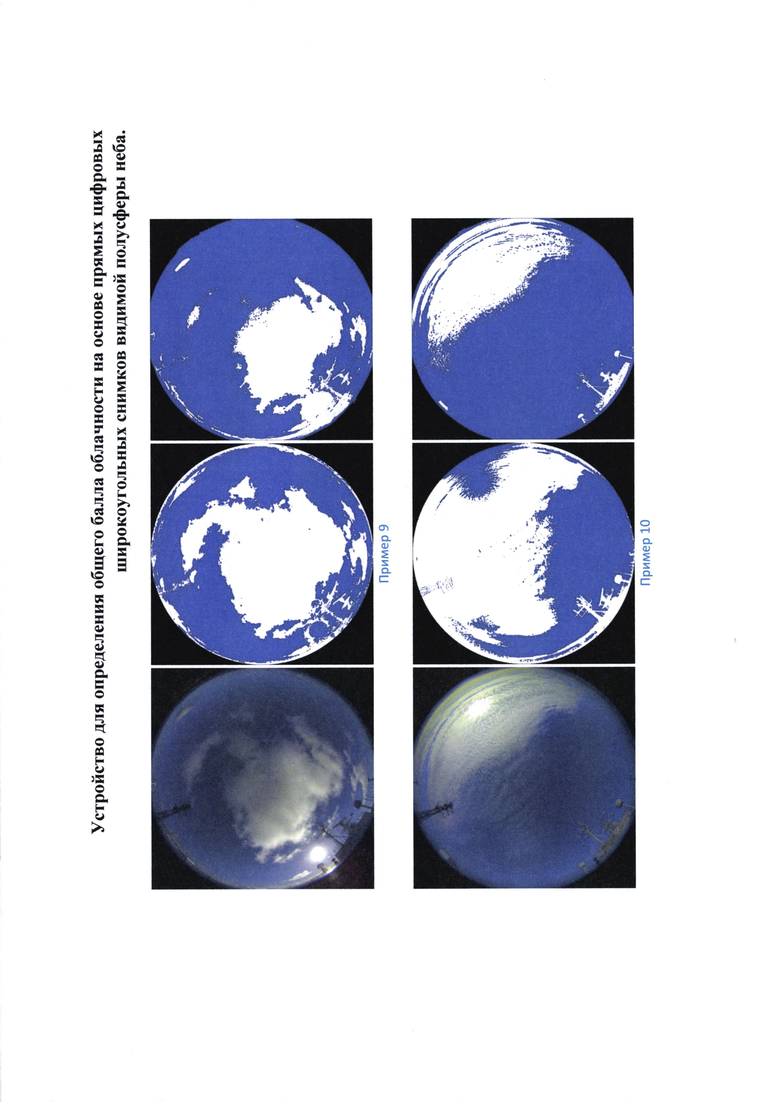
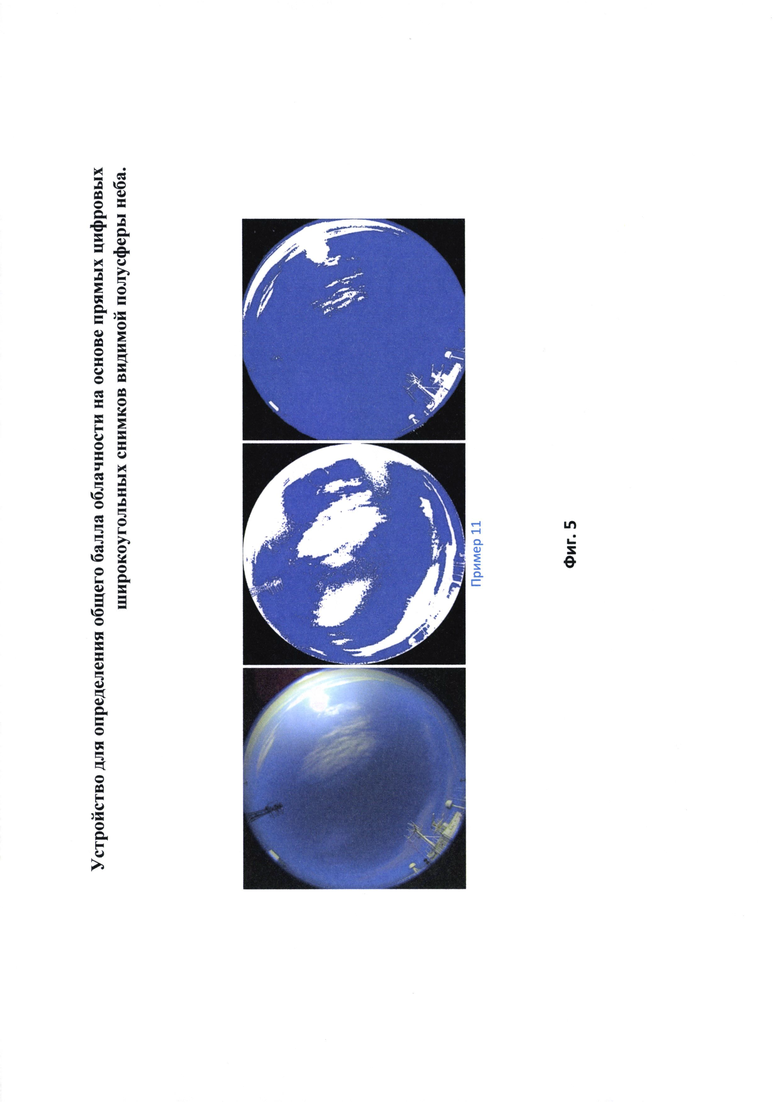
На фиг. 5 представлены изображения: оригинальное (цифровой снимок верхней полусферы неба в видимой области спектра) - слева, иллюстрация классификации точек снимка по алгоритму, используемому в предлагаемом изобретении (в центре), иллюстрация классификации точек снимка по алгоритму, используемому в применяемом до настоящего времени на практике известном устройстве AUTOMATIC TOTAL SKY IMAGER (справа). Условные цветовые обозначения классифицированных точек: черный - «НЕ УЧАСТВУЕТ», синий - «ОТКРЫТОЕ НЕБО», белый - «ОБЛАКО».
Каждый из примеров 1-11 представлен на фиг. 5 тремя изображениями:
- (слева) цветной снимок верхней видимой полусферы неба в оптическом диапазоне. Основная полезная часть снимка представляет собой цветной круг, вписанный в квадрат видимой области изображения. Область изображения, лежащая за пределами этого круга, не содержит полезной информации и заполнена черным цветом. Полезная область снимка изображает состояние небосвода на момент съемки, представляет собой голубой круг с белыми и серыми различной яркости облаками, белым пятном, представляющим солнечный диск, и некоторыми различных цветов объектами, являющимися отображением корабельных надстроек, попавших в поле зрения камеры. Изображение соответствует визуальному восприятию видимой полусферы неба наблюдателем;
- (в центре) объективная картина результата классификации точек оригинального изображения на классы: «ОБЛАКО», «ОТКРЫТОЕ НЕБО» и «НЕ УЧАСТВУЕТ», с использованием заявленного устройства. Представляет собой синий круг полезной области снимка, вписанный в черный квадрат видимой области изображения. На полезной области снимка белым цветом отмечены различного размера и формы пространственные структуры, определенные как облака;
- (справа) объективная картина результата классификации точек оригинального изображения на классы: «ОБЛАКО», «ОТКРЫТОЕ НЕБО» и «НЕ УЧАСТВУЕТ», с использованием устройства-аналога TSI-880. Представляет собой синий круг полезной области снимка, вписанный в черный квадрат видимой области изображения. На полезной области снимка белым цветом отмечены различного размера и формы пространственные структуры, определенные как облака.
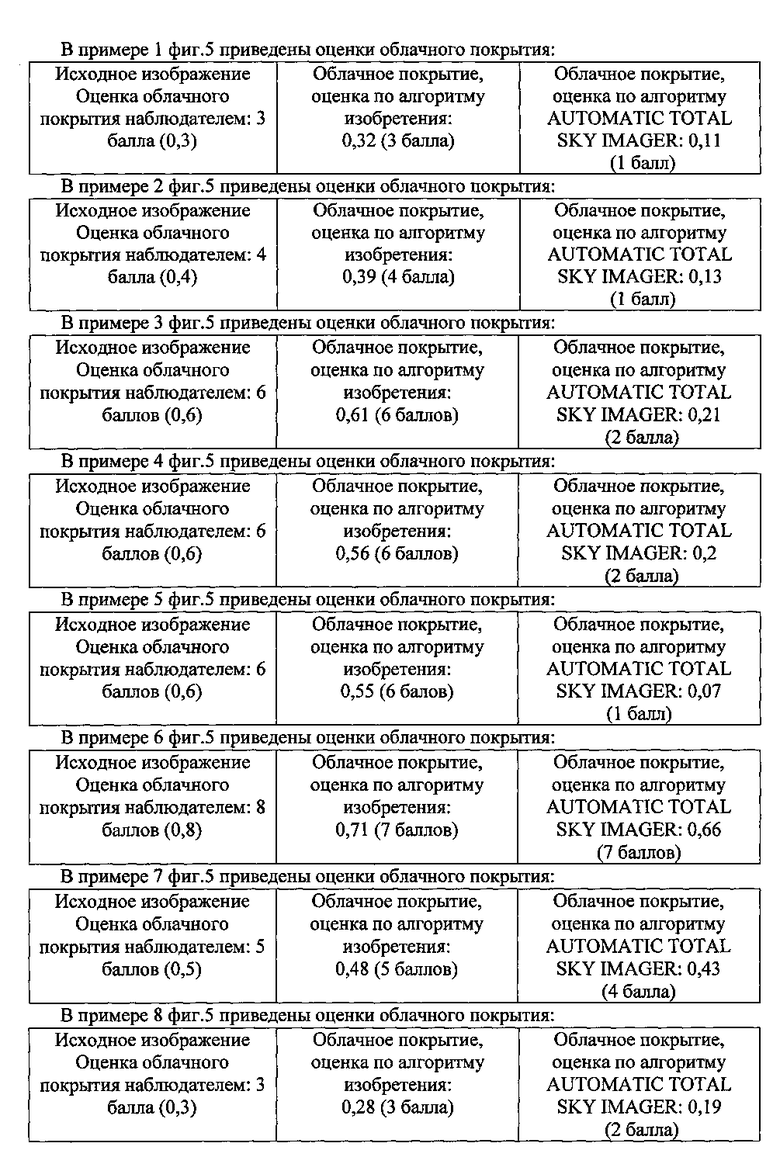
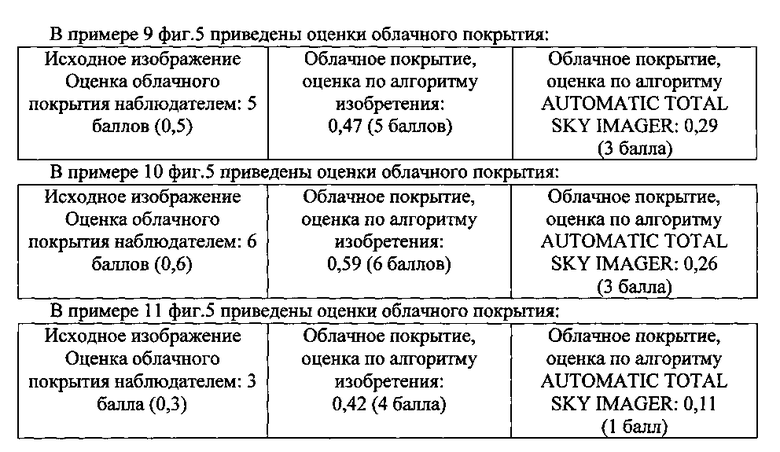
Приведенные на Фиг. 5 результаты показывают очевидное превосходство предлагаемого в изобретении алгоритма оценки общего балла облачности по сравнению с используемыми в существующих системах. Для наглядности можно привести среднюю величину отклонения а также среднеквадратичное отклонение результата каждого из алгоритмов от визуальной оценки наблюдателем.
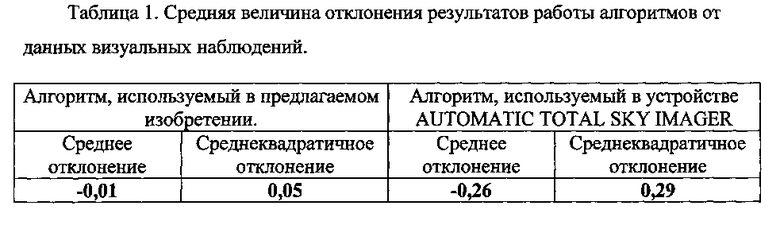
Исходя из приведенных результатов, можно установить, что:
- алгоритм, разработанный для использования в предлагаемом изобретении, представляет результаты, в подавляющем большинстве случаев отличающиеся от оценки наблюдателя не более чем на 5%;
- при этом повсеместно внедряемые алгоритмы, в базе своей имеющие аналоги используемому в AUTOMATIC TOTAL SKY IMAGER, дают оценку, статистически отличающуюся от оценки наблюдателя почти на 30%.
Исполнение установки 1 наружного монтажа в виде единого элемента без выступающих и подвижных частей позволяет значительно повысить безопасность эксплуатации изобретения в условиях наблюдений на борту судна и в полевых условиях любого типа.
В совокупности эти конструктивные особенности позволяют получать данные, необходимые для определения расположения диска солнца на снимке без использования устройства затенения солнца. Устранение влияния засветки в дальнейшем производится блоком 6 в процессе обработки изображения, с использованием данных о местоположении и ориентации в пространстве системы регистрации данных.
Устройство способно вести полностью автоматическое наблюдение и расчет общего балла облачности. В условиях быстроизменяющейся облачности устройство способно вести наблюдения с минимальными периодами (значительно меньшими, чем предписано в программе работы метеостанции). Устройство способно вести архив наблюдений пространственно-временной структуры облачности для повышения достоверности и точности определения общего балла облачности, в том числе для последующего анализа истории наблюдений. Устройство характеризуется повышенной точностью за счет гарантированного распознавания тонкой облачности как в условиях представленного на снимке солнечного диска, так и в его отсутствие; а также за счет использования схемы подавления влияния солнечной засветки.
В целом имеет место:
- автоматизация метеорологических измерений общего балла облачности по пространственно-временным и частотным характеристикам рассеяния излучения в видимой области спектра;
- повышение объективности и точности результатов измерений общего балла облачности;
- повышение уровня надежности и безопасности процедуры проведения наблюдений в полевых условиях повышенной опасности, какими является, например, наблюдения на борту исследовательского судна;
- использование полностью автоматического устройства для определения общего балла облачности.
Предлагаемое изобретение создано в действующем макете, апробировано в натурных условиях. Получены результаты, подтверждающие получение указанного технического результата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения балла общей облачности по цветным цифровым широкоугольным снимкам видимой полусферы неба на основе статистических методов обработки данных | 2020 |
|
RU2777493C2 |
| СПОСОБ ОЦЕНКИ ОБЛАЧНОСТИ НОЧНОЙ АТМОСФЕРЫ И ДАТЧИК НОЧНОЙ ОБЛАЧНОСТИ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2678950C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НАД ВОДНОЙ ПОВЕРХНОСТЬЮ | 2016 |
|
RU2627016C1 |
| СПОСОБ И СИСТЕМА ДАЛЬНЕГО ОПТИЧЕСКОГО ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЛЕТЯЩЕГО В СТРАТОСФЕРЕ ИЛИ НА БОЛЬШОЙ ВЫСОТЕ СО СВЕРХЗВУКОВОЙ СКОРОСТЬЮ ОБЪЕКТА ПО КРИТЕРИЯМ КОНДЕНСАЦИОННОГО СЛЕДА ЕГО СИЛОВОЙ УСТАНОВКИ В АТМОСФЕРЕ | 2012 |
|
RU2536769C2 |
| СПОСОБ ПРОГНОЗА ЗЕМЛЕТРЯСЕНИЙ | 2006 |
|
RU2298818C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ БАЛЛА ОБЛАЧНОСТИ | 2012 |
|
RU2525625C2 |
| Способ определения скорости ветра над водной поверхностью | 2015 |
|
RU2616354C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗЕМЛЕТРЯСЕНИЯ | 2005 |
|
RU2302020C2 |
| Способ обнаружения опасных небесных тел, приближающихся к Земле с дневного неба, и космическая система для его реализации СОДА-2 | 2017 |
|
RU2675205C1 |
| СПОСОБ ТИПИЗАЦИИ ЗАДАЧ ОБРАБОТКИ ДАННЫХ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ | 2012 |
|
RU2602339C2 |
Изобретение относится к устройствам для распознавания количества облачности по пространственно-временной структуре излучения в видимой области и может быть использовано при морских наблюдениях общего балла облачности видимой полусферы неба. Устройство для определения общего балла облачности содержит систему регистрации данных в виде цифровой камеры с широкоугольным объективом, блока контроля положения системы регистрации, включающий трехосевой датчик ускорения свободного падения, трехосевой датчик вращения и датчик географического положения, блок управления регистрацией и обработки данных. Блок управления регистрацией данных связан цифровыми линиями связи с системой регистрации данных и с блоком контроля положения, последние жестко соединены между собой с образованием единой установки наружного монтажа. Цифровая камера закреплена на корпусе блока контроля положения системы регистрации, который выполнен в виде мини-компьютера в компактном ударопрочном пыле-влагозащищенном корпусе, а цифровые линии выполнены в виде единого кабеля. Технический результат - повышение достоверности, объективности и точности определения общего балла облачности, и возможность регистрации видимой пространственной структуры облачности в цифровом формате. 7 з.п. ф-лы, 15 ил.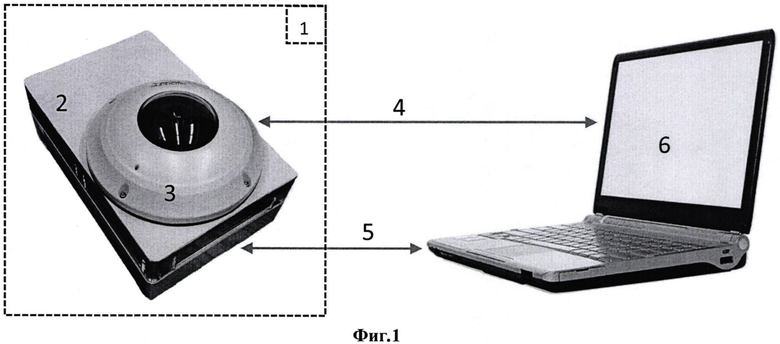
1. Устройство для определения общего балла облачного покрытия, содержащее систему регистрации данных в виде цифровой камеры с широкоугольным объективом, выполненную с возможностью приема излучения оптического диапазона и блока контроля положения системы регистрации, включающего трехосевой датчик ускорения свободного падения, трехосевой датчик вращения и датчик географического положения, а также блок управления регистрацией и обработкой данных, выполненный с возможностью обработки получаемых данных и хранения цифровых регистрации информации о закрытых и незакрытых облачностью участках видимой полусферы небосвода, при этом блок управления регистрацией данных связан цифровыми линиями связи с системой регистрации данных и с блоком контроля положения последней, выполненным в виде мини-компьютера в ударопрочном, пыле-влагозащищенном корпусе, на котором жестко закреплена система регистрации данных с образованием тем самым единой установки наружного монтажа, снабженной средствами крепления.
2. Устройство по п. 1, отличающееся тем, что система регистрации выполнена в виде цифровой камеры с разрешением 1920×1920 рх, стандарта высокой четкости, с широкоугольным объективом типа «рыбий глаз».
3. Устройство по п. 2, отличающееся тем, что в фокусе широкоугольного объектива размещена матрица цифровой камеры, подключенной цифровыми линиями к блоку управления регистрацией данных.
4. Устройство по любому из пп. 1-3, отличающееся тем, что установка наружного монтажа выполнена без выступающих и подвижных частей, а цифровые линии выполнены в виде единого кабеля.
5. Устройство по п. 4, отличающееся тем, что установка наружного монтажа снабжена монтажной пластиной и выполнена со средствами крепления к лееру верхней палубы морского судна в месте, максимально свободном от затенения надстройками судна.
6. Устройство по любому из пп. 1-3, 5, отличающееся тем, что блок управления регистрацией и обработкой данных выполнен в виде персонального компьютера.
7. Устройство по п. 6, отличающееся тем, что блок управления регистрацией и обработки данных выполнен с возможностью приема данных положения и пространственной ориентации системы регистрации, управления режимами работы системы регистрации данных по результатам анализа ее положения и пространственной ориентации, приема снимков видимой полусферы неба с системы регистрации данных по цифровой линии связи и подавления солнечной засветки.
8. Устройство по п. 7, отличающееся тем, что блок управления регистрацией и обработки данных выполнен с возможностью хранения цифровых фотографий, программной обработки пикселей изображения с получением информации о цветовых координатах в цветовом пространстве RGB для каждого пикселя и разделением точек полученного поля на три класса: «ОТКРЫТОЕ НЕБО», «ОБЛАКО» и «НЕ УЧАСТВУЕТ» для определения общего процента облачного покрытия и структуры облачности.
| S.V | |||
| Zuev, A.A | |||
| Tikhomirov "CLOUDINESS MONITORING FOR DATABASE OF LOCAL WEATHER", Twelfth Joint International Symposium on Atmospheric and Ocean Optics/Atmospheric Physics, edited by G | |||
| A | |||
| Zherebtsov, G | |||
| G | |||
| Matvienko, Proc | |||
| of SPIE Vol | |||
| Ветряный двигатель | 1926 |
|
SU6160A1 |
| US 8351773 B1, 08.01.2013 | |||
| WO 2014150166 A1, 25.09.2014 | |||
| RU 2012108434 A, 20.09.2013. | |||

