Заявляемый вертолет относится к авиационной технике, а именно к вертолетам.
Наиболее близким по технической сущности является вертолет с контролируемым перемещением центра тяжести, который содержит корпус, несущий воздушный винт, выполненный с возможностью его продольного перемещения и поперечного наклона относительно корпуса вместе с двигателем и редуктором для его привода. Продольное перемещение винта используется для управления вертолетом по тангажу путем смещения вектора тяги относительно центра масс вертолета, а наклон - для управления креном путем наклона вектора тяги. Использование продольного перемещения винта позволяет расширить возможность балансировки вертолета и смягчить требования к распределению веса полезного груза внутри корпуса. Для управления по курсу предложено использовать дифференциальное изменение коллективного шага системы из двух соосных или перекрещивающихся противоположно вращающихся несущих винтов с помощью устройств, аналогичных автомату перекоса, в котором исключена функция управления циклическим шагом. (См. патент US №6182923, МПК В64С 27/04, В64С 27/32, В64С 27/52, B64D 35/04).
Недостатком данной конструкции является сложность механической конструкции привода соосных винтов и устройства управления коллективным шагом винтов, быстрый износ деталей, что приводит к высоким эксплуатационным расходам и резко снижают надежность конструкции. Также механизмы управления шагом винтов увеличивают трение в системе передачи
Задачей предлагаемого изобретения является создание надежного легкого вертолета с обеспечением возможности уменьшения трения в системе передачи вращающего момента на винты при максимальном снижении эксплуатационных расходов.
Для предлагаемого вертолета используют стандартные системы линейного перемещения, широко применяемые в промышленности. Это системы, в которых используют шарико-винтовую пару или зубчатую рейку с шестерней в комбинации с электрическим сервоприводом. Систему линейного перемещения монтируют на корпусе вертолета и закрепляют на перемещаемой платформе двигатель с редуктором и несущим винтом.
Поставленная задача решается за счет того, что вертолет содержит: корпус, несущие воздушные винты в передней и задней частях корпуса. Первый винт выполнен с обеспечением возможности продольного перемещения и поперечного наклона его оси относительно корпуса, а второй винт выполнен с обеспечение возможности поперечного наклона его оси относительно корпуса. Перемещение и наклон винтов происходит вместе с двигателями и редукторами. Винты имеют фиксированный шаг. Винты могут быть выполнены сдвоенными, соосными, противоположно вращающимися.
Вертолет содержит: корпус, несущие воздушные винты в передней и задней частияхкорпуса. Первый винт выполнен с обеспечением возможности продольного перемещения и поперечного наклона его оси относительно корпуса, а второй винт выполнен с обеспечением возможности поперечного перемещения. Перемещение и наклон винтов происходит вместе с двигателями и редукторами. Винты имеют фиксированный шаг. Винты могут быть выполнены сдвоенными, соосными, противоположно вращающимися.
Сущность изобретения поясняется чертежами, где
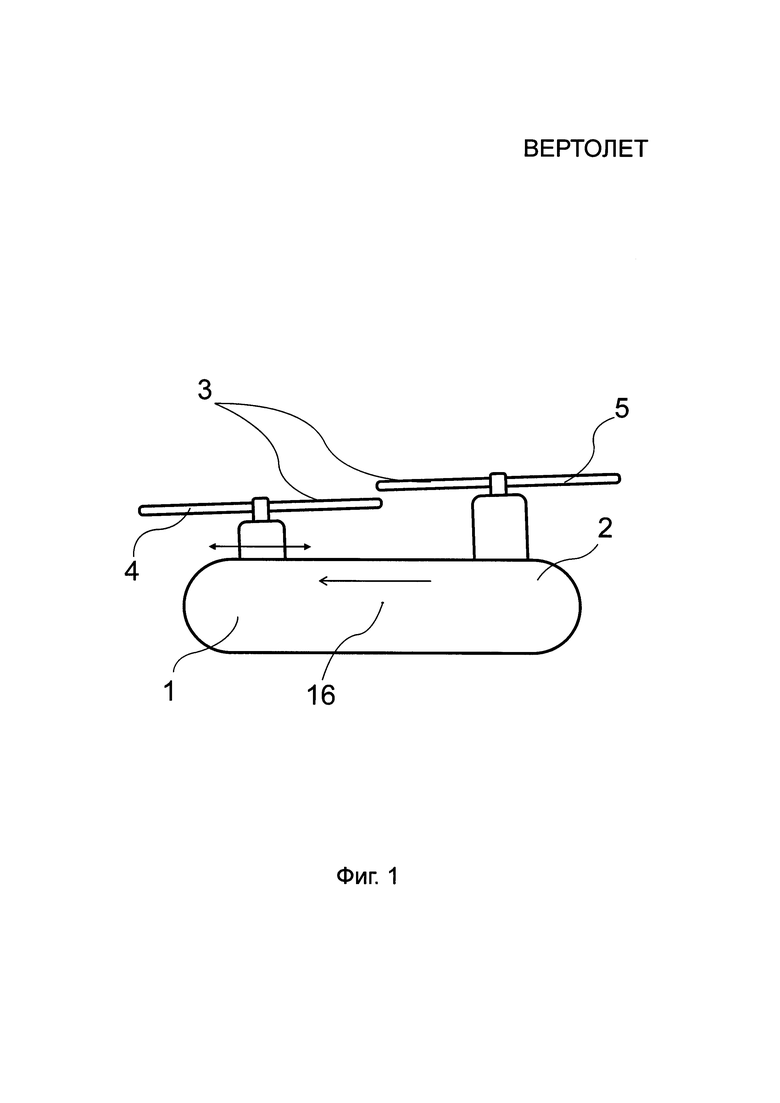
На фиг. 1 - вид вертолета сбоку.
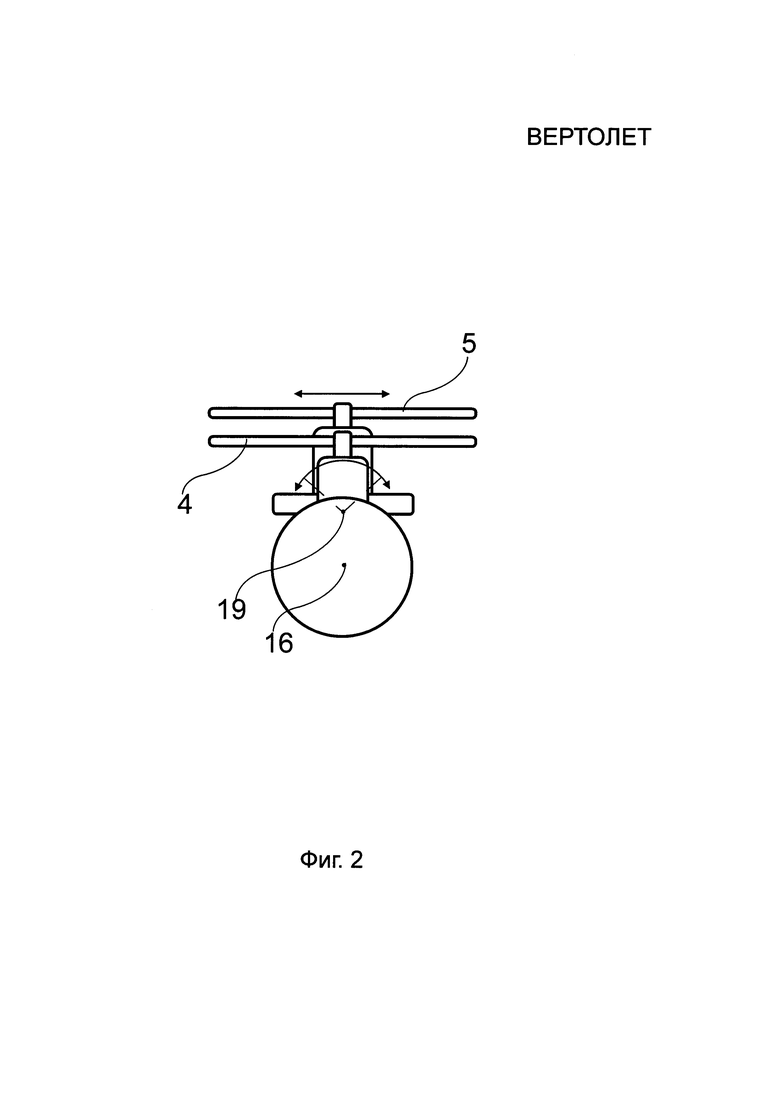
На фиг. 2 - вид вертолета спереди со вторым несущим винтом, выполненным с возможностью поперечного перемещения.
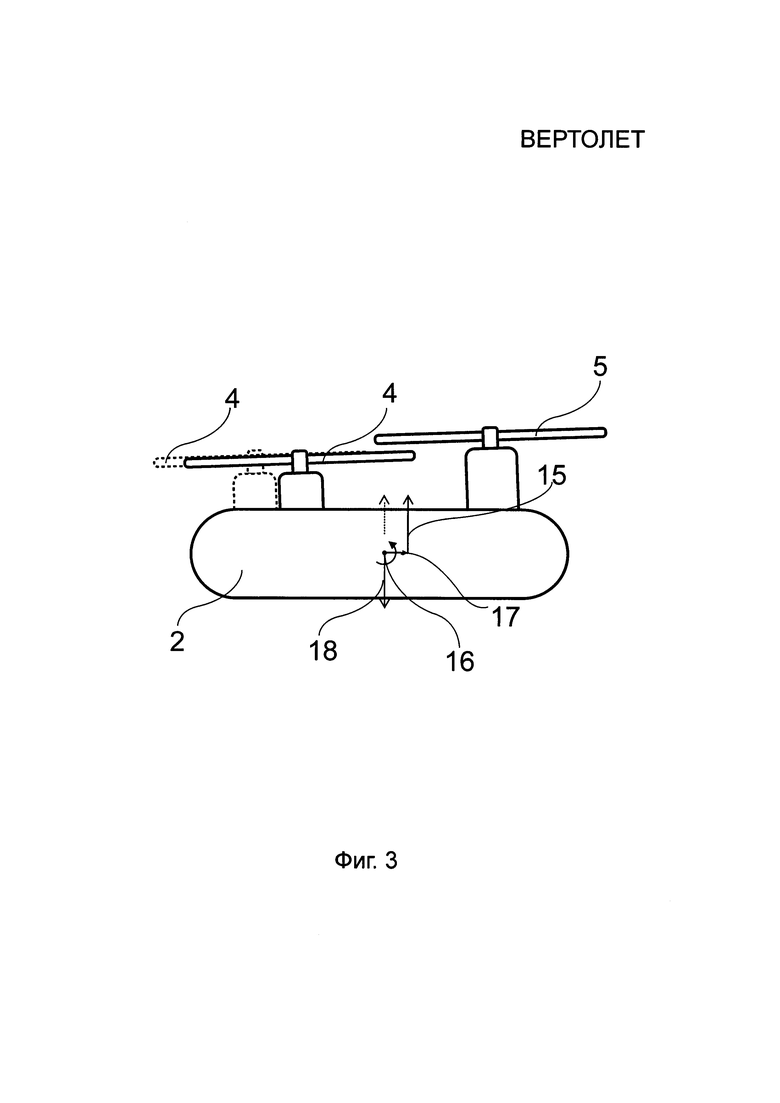
На фиг. 3 - вид вертолета сбоку со схемой действия сил, изменяющих тангаж при продольном перемещении несущего винта.
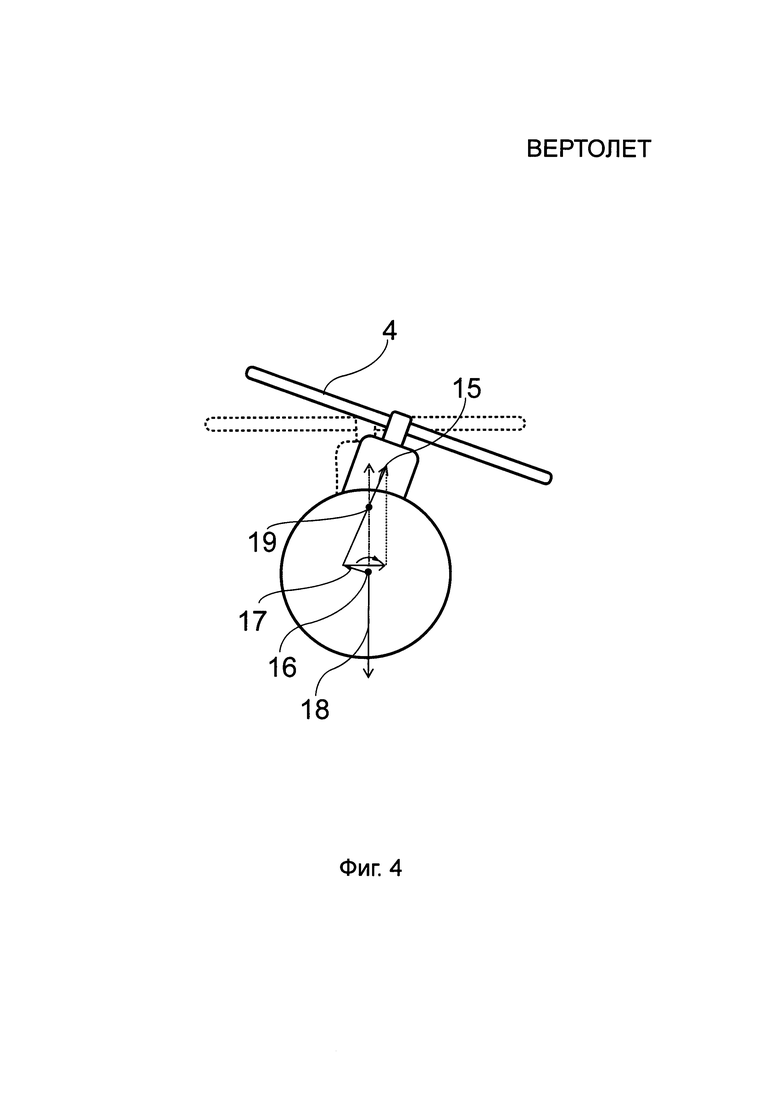
На фиг. 4 - вид вертолета спереди со схемой действия сил, изменяющих крен и курс при поперечном наклоне несущего винта.
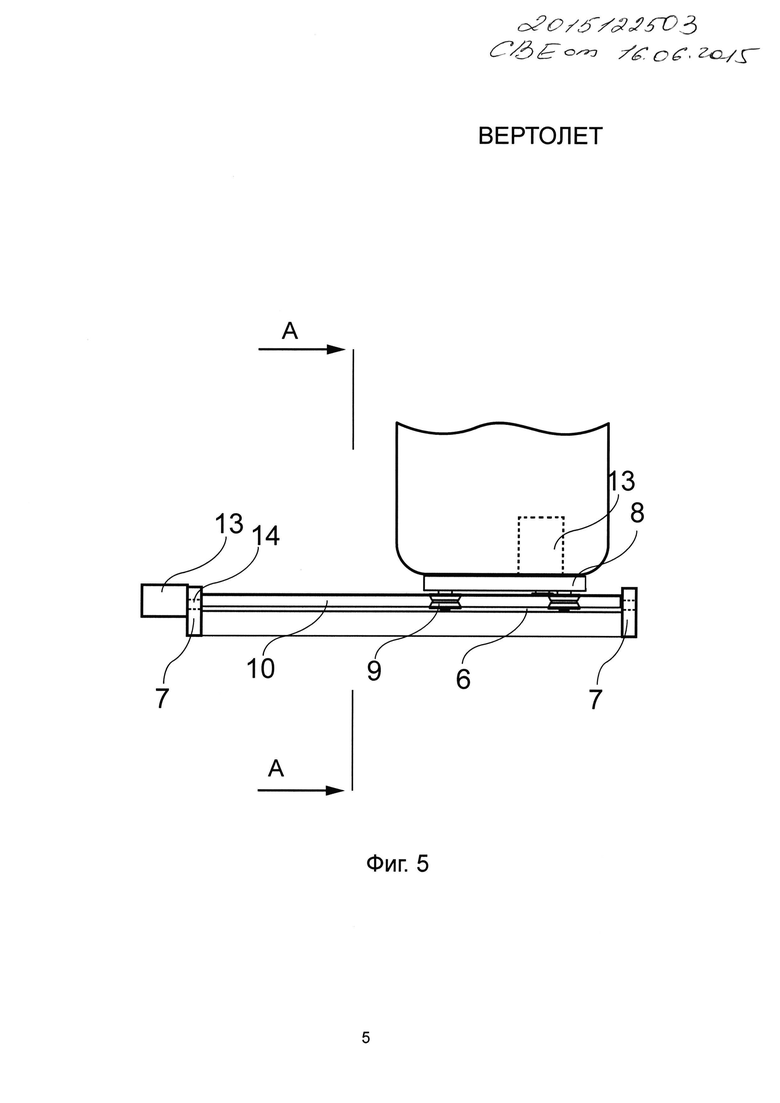
На фиг. 5 - вид спереди механизма продольного перемещения и поперечного наклона несущего винта.
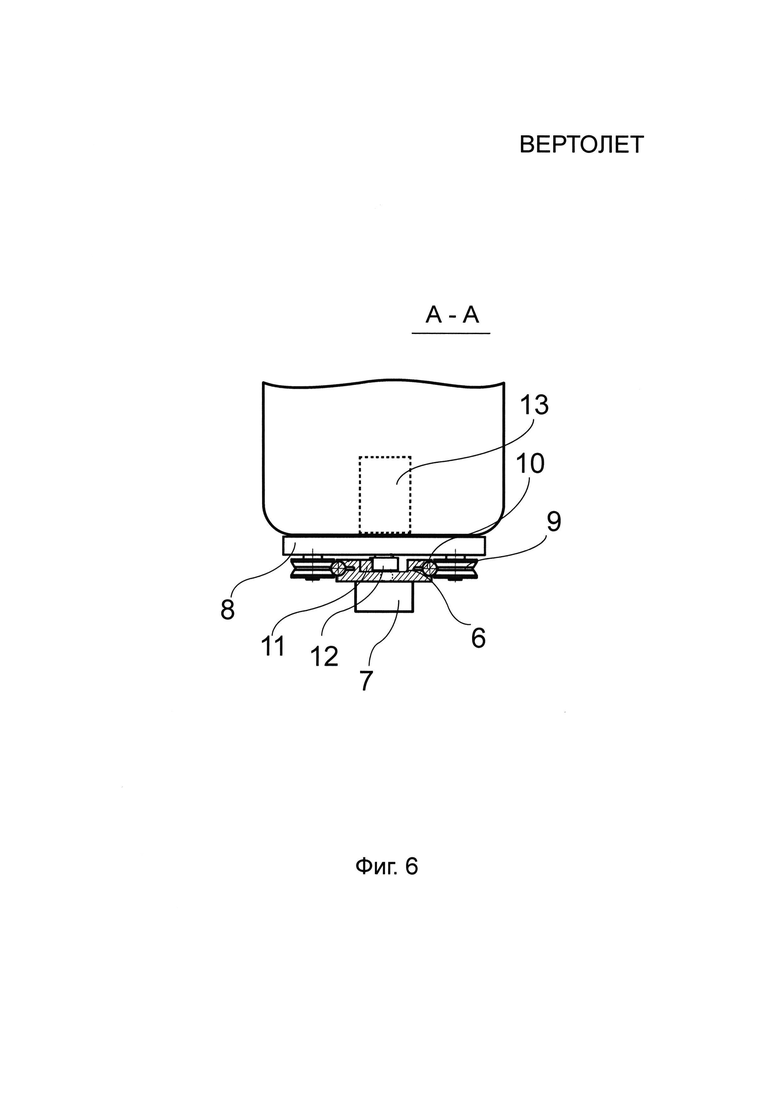
На фиг. 6 - вид сбоку механизма продольного перемещения и поперечного наклона несущего винта.
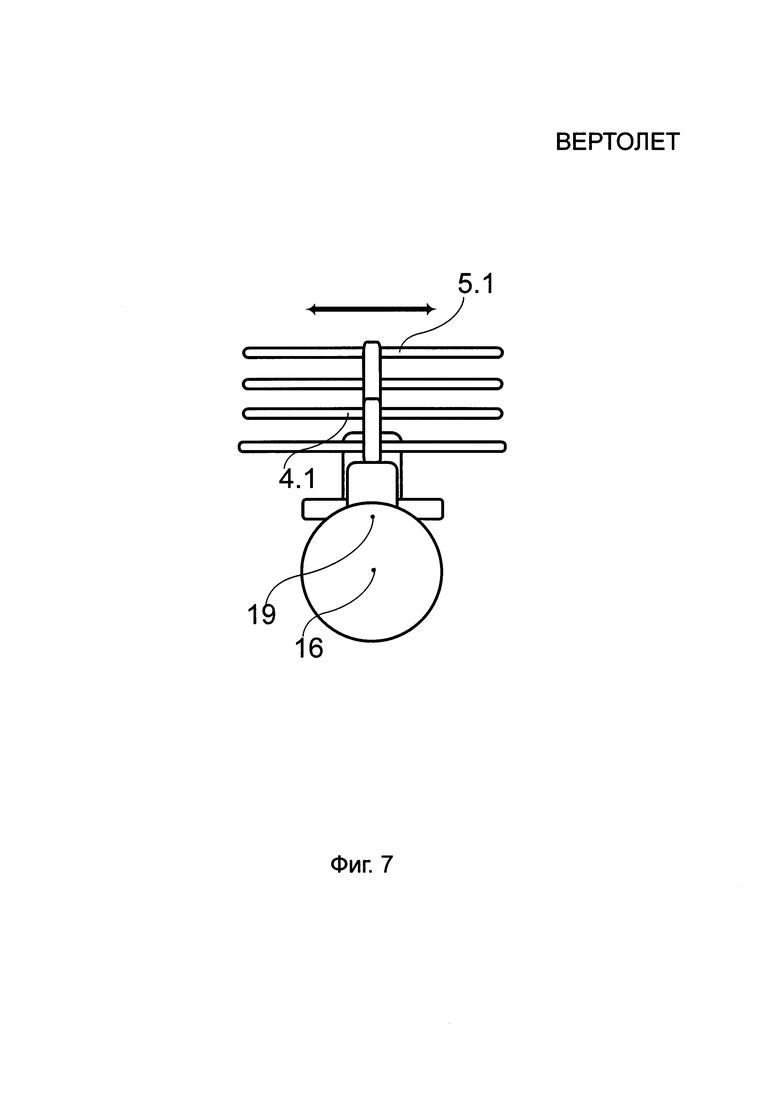
На фиг. 7 - вид вертолета со сдвоенными, соосными противоположно вращающимися винтами спереди.
Вертолет 1 содержит: корпус 2, несущие воздушные винты 3 в передней и задней частях корпуса. Первый винт 4 выполнен с обеспечением возможности продольного перемещения и поперечного наклона его оси относительно корпуса 2. А второй винт 5 выполнен с обеспечением возможности поперечного наклона его оси относительно корпуса 2. Перемещение и наклон винтов 3 происходит вместе с двигателями и редукторами. Винты 3 имеют фиксированный шаг. Винты 3 могут быть выполнены сдвоенными, соосными, противоположно вращающимися 4.1 и 5.1 соответственно. (см. фиг. 1, 2, 3, 4, 5, 6, 7)
Вертолет 1 содержит: корпус 2, несущие воздушные винты 3 в передней и задней части корпуса. Первый винт 4 выполнен с обеспечением возможности продольного перемещения и поперечного наклона его оси относительно корпуса 2. А второй винт 5 выполнен с обеспечением возможности поперечного перемещения его оси относительно корпуса 2. Перемещение и наклон винтов 3 происходит вместе с двигателями и редукторами. Винты 3 имеют фиксированный шаг. Винты 3 могут быть выполнены сдвоенными, соосными, противоположно вращающимися 4.1 и 5.1 соответственно. (см. фиг. 1, 2, 3, 4, 5, 6, 7)
Реализация линейного перемещения несущих винтов 3, 4, 5, 4.1 и 5.1 показана на фиг. 5, 6. Несущий алюминиевый профиль 6 закрепляют на корпусе 2 с помощью опор 7. Подвижная платформа 8 перемещается по профилю 6 с помощью роликов 9, опирающихся на стальные направляющие 10, закрепленные в профиле 6. На профиле 6 монтируют также зубчатую рейку 11, с ней в сцеплении устанавливают зубчатое колесо 12, закрепленное на платформе 8 и приводимое во вращение электрическим сервоприводом 13. При вращении колеса 12 платформа 8 линейно перемещается вдоль профиля 6. Наклон винтов 3, 4, 5, 4.1 и 5.1 осуществляют с помощью электрического сервопривода 13, поворачивая профиль 6 на осях 14, закрепленных на подшипниках в опорах 7. (см. фиг. 5, 6)
Вертолет работает следующим образом.
Взлет и набор высоты осуществляется путем увеличения мощности двигателей, приложенной к несущим винтам 3, 4, 5, 4.1 и 5.1. Это приводит к увеличению скорости вращения и тяги винтов 3, 4, 5, 4.1 и 5.1, которая становится больше веса вертолета 1, что вызывает его подъем. Соответственно, снижение производится путем уменьшения мощности двигателей. Движение вперед или назад осуществляется путем смещения несущего переднего винта 4 (или обоих винтов) назад или вперед относительно корпуса 2, соответственно. На фиг. 3 показан пример действия сил при смещении несущего винта 4 назад. Такое смещение вызывает смещение линии силы тяги 15 относительно центра масс вертолета 16. В результате возникает плечо 17 пары силы тяги 15 и силы тяжести 18 и соответствующий момент сил, который вызывает наклон корпуса 2 вперед, что в свою очередь приводит к появлению горизонтальной составляющей силы тяги винтов. Движение влево и вправо осуществляется с помощью наклона обоих несущих винтов в соответствующую сторону. При этом важно, что центр 19, относительно которого осуществляется наклон, находится выше центра масс вертолета 16, так что сила тяги 15 винтов создает вращающий момент, стремящийся повернуть корпус 2 в направлении наклона винтов 3, 4, 5, 4.1 и 5.1. На фиг. 4 показан пример действия сил при поперечном наклоне винта. Такой наклон вызывает поворот линии действия силы тяги 15 вокруг центра 19. В результате возникает плечо 17 пары силы тяги 15 и силы тяжести 18 и соответствующий момент сил, который вызывает поперечный наклон корпуса 2. Одновременно возникает горизонтальная поперечная компонента силы тяги 15, которая вызывает поперечное движение корпуса 2 при наклоне винтов 3, 4, 5, 4.1 и 5.1 в одну сторону или вращение корпуса 2 вокруг вертикальной оси (изменение курса) при наклоне переднего и заднего винтов в противоположные стороны. В варианте с поперечно смещаемым задним несущим винтом 5 (фиг. 2) его смещение в левую или правую сторону вдоль направляющей вызывает смещение линии действия силы тяги 15 относительно центра масс вертолета 16. Это приводит к появлению вращающего момента сил и наклону корпуса 2 в противоположную сторону, аналогично действию сил, показанному на фиг. 3. Поворот вокруг вертикальной оси в этом варианте выполняется путем поперечного наклона переднего несущего винта 4. Управление высотой полета осуществляется с помощью изменения мощности двигателей также без использования механизмов изменения шага. Перемещение и наклон винтов 3, 4, 5, 4.1 и 5.1 осуществляют вместе с двигателями и редукторами, приводящими винт во вращение (на фиг. не показано). Для спасения вертолета 1 при отказе двигателя используют баллистическую парашютную систему, которая обеспечивает вытягивание и раскрытие парашюта с помощью твердотопливной ракеты (на фиг. не показано). Такую парашютную систему размещают на корпусе 2 в центре между передним 4 и задним 5 винтами. Прямое соединение несущего винта 3, 4, 5, 4.1 и 5.1 с редуктором и двигателем обеспечивает быструю остановку винта 3, 4, 5, 4.1 и 5.1 за счет компрессии воздуха в заглушенном двигателе, что позволяет быстро привести парашют в действие. Дополнительно ускоряют остановку винта 3, 4, 5, 4.1 и 5.1 с помощью тормоза.
Для реализации изобретения была построена модель вертолета, в которой использованы два несущих винта с фиксированным шагом. Один из винтов выполнен с возможностью продольного линейного перемещения и поперечного наклона, а второй - с возможностью поперечного наклона. В качестве управляющих приводов использованы стандартные рулевые сервомашинки. Преобразование вращательного движения рулевой машинки в возвратно-поступательное движение мотора с закрепленным на его оси воздушным винтом осуществлено с помощью кулисного механизма. Модель прошла успешные летные испытания. В ходе испытаний продемонстрирована управляемость вертолета по всем трем осям управления.
Достигнутые предлагаемым изобретением результаты в наибольшей степени целесообразны для вертолетов малого размера, расширяя возможности их использования. А использование в качестве несущих винтов сдвоенных противоположно вращающихся соосных винтов позволяет увеличить грузоподъемность вертолета, не увеличивая диаметр несущих винтов и мощность двигателей.
Конструкция предлагаемого вертолета проста, экономична и пригодна для массового использования. В вертолете используют простые и доступные детали, что упрощает сборку, эксплуатацию и обслуживание, а в результате приводит к уменьшению эксплуатационных расходов.
Отказ от механизма управления шагом несущих винтов в предлагаемом вертолете позволяет решить задачу уменьшения трения в системе передачи вращающего момента на винты. Использование двух пространственно разнесенных несущих винтов, выполненных с возможностью продольного и поперечного перемещения и поперечного наклона в противоположные стороны, позволяет отказаться от использования механизмов управления шагом винтов, так как предлагаемая конструкция позволяет создать управляющие моменты сил по трем осям за счет изменения положения вектора тяги относительно центра масс вертолета.
Таким образом, поставленная задача выполнена.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИНТОКРЫЛ | 2012 |
|
RU2500578C1 |
| Конвертоплан | 2017 |
|
RU2657706C1 |
| СИСТЕМА ДВУХ СООСНЫХ НЕСУЩИХ ВИНТОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2709081C1 |
| БЕСПИЛОТНЫЙ КОНВЕРТОВИНТОКРЫЛ | 2009 |
|
RU2432300C2 |
| МНОГОЦЕЛЕВОЙ ДВУХФЮЗЕЛЯЖНЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2650258C1 |
| МНОГОВИНТОВОЙ БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2598105C1 |
| БЕСПИЛОТНЫЙ ПРЕОБРАЗУЕМЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ | 2015 |
|
RU2601470C1 |
| СКОРОСТНОЙ СИНХРОКОПТЕР-АМФИБИЯ | 2016 |
|
RU2645515C2 |
| БЕСПИЛОТНЫЙ ТЯЖЕЛЫЙ ВЕРТОЛЕТ-САМОЛЕТ | 2017 |
|
RU2667433C2 |
| СКОРОСТНОЙ ПРЕОБРАЗУЕМЫЙ ВИНТОКРЫЛ | 2015 |
|
RU2609856C1 |
Изобретение относится к области авиации, в частности к конструкциям вертолетов. Вертолет содержит корпус, несущие воздушные винты в передней и задней частях корпуса. Первый винт выполнен с обеспечением возможности продольного перемещения и поперечного наклона его оси относительно корпуса, а второй винт выполнен с обеспечением возможности поперечного перемещения. Перемещение и наклон винтов происходит вместе с двигателями и редукторами. Винты имеют фиксированный шаг. Винты могут быть выполнены соосными противоположно вращающимися. Достигается возможность создания легкого вертолета, обеспечивающего максимальное снижение эксплуатационных расходов. 2 н.п. ф-лы, 7 ил.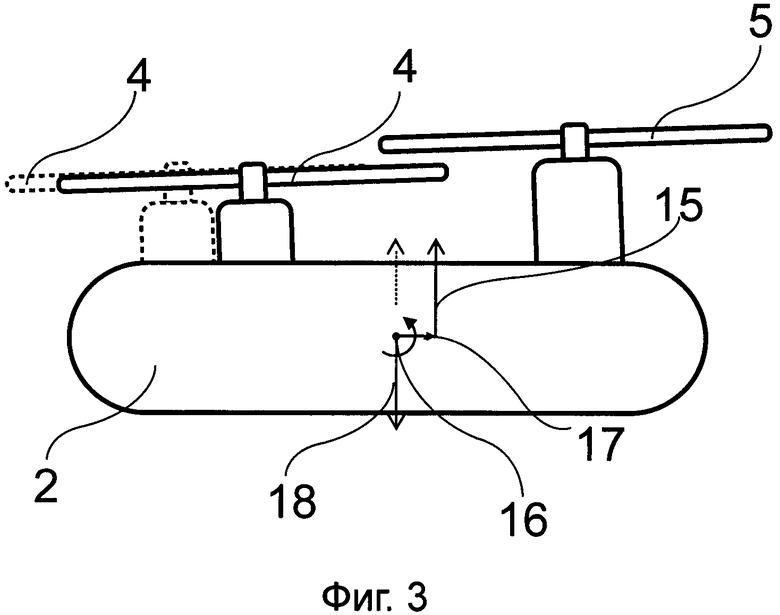
1. Вертолет, содержащий корпус, несущий воздушный винт, выполненный с обеспечением возможности продольного перемещения и поперечного наклона его оси относительно корпуса, причем винт выполнен с обеспечением возможности перемещения и наклона вместе с двигателем и редуктором, отличающийся тем, что вертолет дополнительно снабжен вторым несущим винтом, выполненным с обеспечением возможности поперечного перемещения его оси относительно корпуса, причем винты разнесены первый в переднюю, а второй в заднюю части корпуса, оба винта имеют фиксированный шаг.
2. Вертолет, содержащий корпус, несущий воздушный винт, выполненный с обеспечением возможности продольного перемещения и поперечного наклона его оси относительно корпуса, причем винт выполнен с обеспечением возможности перемещения и наклона вместе с двигателем и редуктором, отличающийся тем, что вертолет дополнительно снабжен вторым несущим винтом, выполненным с обеспечением возможности поперечного перемещения его оси относительно корпуса, причем винты разнесены первый в переднюю, а второй в заднюю части корпуса, оба винта имеют фиксированный шаг, при этом винты выполнены сдвоенными соосными противоположно вращающимися.
| US 2002100835 A1, 01.08.2002 | |||
| US 6182923 B1, 06.02.2001 | |||
| US 3905565 A, 16.09.1975 | |||
| МНОГОВИНТОВОЙ ВЕРТОЛЕТ | 2012 |
|
RU2500577C1 |
| АДАПТЕР МУЛЬТИПЛЕКСНЫХ КАНАЛОВ ИНФОРМАЦИОННОГО ОБМЕНА | 2000 |
|
RU2163728C1 |

