Настоящее изобретение относится к электромагнитному датчику крутящего момента с передающей катушкой для генерирования магнитного поля в объекте, крутящий момент которого должен определяться, с по меньшей мере двумя приемными катушками, которые принимают ответный сигнал, индуцированный в объекте посредством магнитного поля передающей катушки.
Магнитоупругий датчик крутящего момента основывается на обратном магнитострикционном эффекте, то есть эффекте, состоящем в том, что ферромагнитные материалы испытывают изменение в магнитной восприимчивости, если возникают механические напряжения. Так как механические напряжения индуцируются, помимо растягивающих сил и сжимающих сил, также посредством кручения, обратный магнитострикционный эффект может использоваться для измерения крутящего момента, например, чтобы крутящий момент на валу измерять бесконтактным образом. Если магнитное поле индуцируется в ферромагнитном слое, например, вала, то в этом слое в зависимости от возникающих напряжений генерируется ответный сигнал, который может регистрироваться приемными катушками. Так как на ответный сигнал оказывают влияние напряжения, возникающие из-за кручения в ферромагнитном материале, которые в свою очередь обусловлены крутящим моментом, из ответного сигнала можно сделать вывод в отношении крутящего момента вала. Детектированный измеренный сигнал зависит от расстояния от датчика крутящего момента до ферромагнитного слоя и от температуры ферромагнитного слоя. Поэтому точность, с которой может определяться крутящий момент из ответного сигнала, зависит в том числе от того, насколько хорошо датчик крутящего момента может быть позиционирован по отношению к объекту, крутящий момент которого определяется.
Задачей настоящего изобретения является предоставить магнитоупругий датчик крутящего момента, который обеспечивает возможность предпочтительного позиционирования.
Эта задача решается посредством магнитоупругого датчика крутящего момента согласно пункту 1 формулы изобретения. Зависимые пункты содержат предпочтительные варианты осуществления изобретения.
Соответствующий изобретению магнитоупругий датчик крутящего момента содержит передающую катушку для индуцирования магнитного поля в объекте, крутящий момент которого должен определяться, а также по меньшей мере две приемные катушки, разнесенные относительно передающей катушки, которые принимают ответный сигнал, генерированный в объекте магнитным полем передающей катушки. Передающая катушка имеет осевое направление и торцевую плоскость передающей катушки, приводимую к объекту. Соответственно, приемные катушки имеют соответствующую торцевую плоскость, приводимую к объекту, причем по меньшей мере торцевая плоскость одной из приемных катушек выступает над торцевой плоскостью передающей катушки.
Объекты, крутящие моменты которых должны быть измерены, часто имеют симметричную цилиндрическую форму, как это имеет место в приводных валах и иных валах, передающих усилия. За счет того, что торцевая плоскость по меньшей мере одной приемной катушки выступает над торцевой плоскостью передающей катушки, геометрия приводимой к объекту торцевой плоскости датчика целенаправленным образом может быть согласована с криволинейной поверхностью объекта.
В частности, могут иметься, например, две пары приемных катушек, окружающих передающую катушку, из которых каждая пара имеет две приемные катушки, размещенные на противолежащих друг другу сторонах окружности передающей катушки. Приемные катушки пары приемных катушек имеют, соответственно, приводимую к объекту торцевую плоскость приемной катушки и принимают ответный сигнал, генерированный в объекте магнитным полем передающей катушки. При этом по меньшей мере торцевые плоскости приемных катушек пары приемных катушек выступают над торцевой плоскостью передающей катушки. При этом, например, возможно, что торцевые плоскости приемных катушек другой пары приемных катушек расположены на одной линии с торцевой плоскостью передающей катушки. Альтернативно, также возможно, что все торцевые плоскости приемных катушек выступают над торцевой плоскостью передающей катушки. При этом то, какая из двух альтернатив применяется, может определяться, в частности, с учетом ориентации торцевых плоскостей приемных катушек по отношению к объекту. Если, например, соединительная линия между приемными катушками пары приемных катушек должна проходить параллельно к оси вращения вала, торцевые плоскости приемных катушек могут находиться на одной линии с торцевой плоскостью передающей катушки. Если вторая пара приемных катушек размещена так, что ее соединительная линия пересекает перпендикулярно соединительную линию первой пары приемных катушек, то эта соединительная линия проходит параллельно касательной к окружности вала. Если теперь торцевые плоскости приемных катушек выступают над торцевой плоскостью передающей катушки, то торцевые плоскости приемных катушек второй пары приемных катушек имеют то же самое расстояние до поверхности вала, что и торцевая плоскость передающей катушки и расположенные на одной линии с ней торцевые плоскости приемных катушек первой пары приемных катушек. Если, напротив, описанная конфигурация из передающей катушки и пар приемных катушек должна располагаться с поворотом на 45° вокруг оси передающей катушки по отношению к валу, то является предпочтительным, если все торцевые плоскости приемных катушек расположены на одной линии и выступают над торцевой плоскостью передающей катушки.
Чтобы повысить индуктивность катушек и/или проводить магнитное поле, передающая катушка и/или приемные катушки могут иметь сердечник, такой как ферритовый сердечник. В особенности, передающая катушка и приемная катушка также могут размещаться на общем сердечнике, например на общем ферритовом сердечнике. В этом случае сердечник имеет участок сердечника передающей катушки и участки сердечника приемных катушек, причем участок сердечника передающей катушки и участки сердечника приемных катушек имеют торцевые плоскости сердечника, которые расположены на одной линии с торцевой плоскостью передающей катушки или торцевыми плоскостями приемных катушек. Посредством общего сердечника установленная таким образом геометрия чувствительной поверхности датчика крутящего момента может быть реализована за счет подходящего выполнения общего сердечника.
Соответствующий изобретению магнитоупругий датчик крутящего момента может, в частности, конструироваться с жесткой геометрией, то есть индивидуально по отношению к объекту, крутящий момент которого должен определяться с помощью датчика. Но также существует возможность выполнить магнитоупругий датчик крутящего момента переменным. Это достигается тем, что по меньшей мере положение торцевой плоскости передающей катушки по отношению к торцевым плоскостям приемных катушек может перемещаться вдоль осевого направления передающей катушки. Таким способом можно варьировать величину, на которую по меньшей мере одна торцевая плоскость приемной катушки выступает над торцевой плоскостью передающей катушки. Это обеспечивает возможность согласования датчика крутящего момента с различными объектами, например валами с различными диаметрами валов. В случае общего сердечника может, например, иметься механизм перемещения для перемещения участка сердечника передающей катушки с размещенной на нем передающей катушкой вдоль осевого направления передающей катушки. Например, механизм перемещения можно реализовать, если участок сердечника передающей катушки выполнен, в противоположность остальному сердечнику, как индивидуальная, например, цилиндрическая часть сердечника, которая на своем конце, противоположном передающей катушке, снабжена резьбой. Остальной сердечник имеет тогда сопряженную резьбу, взаимодействующую с резьбой цилиндрической части сердечника, в частности в центре сердечника между участками сердечника приемных катушек. Посредством проворачивания участка сердечника передающей катушки может осуществляться очень точная юстировка величины, на которую торцевые плоскости приемных катушек выступают над торцевой плоскостью передающей катушки.
Соответствующий изобретению датчик крутящего момента выполнен с возможностью определения крутящего момента объекта с незначительным расстоянием до него в боковом положении. При этом передающая катушка и приемные катушки могут все располагаться одинаково близко к объекту.
Другие признаки, свойства и преимущества предложенного изобретения вытекают из последующего описания примеров выполнения со ссылками на приложенные чертежи.
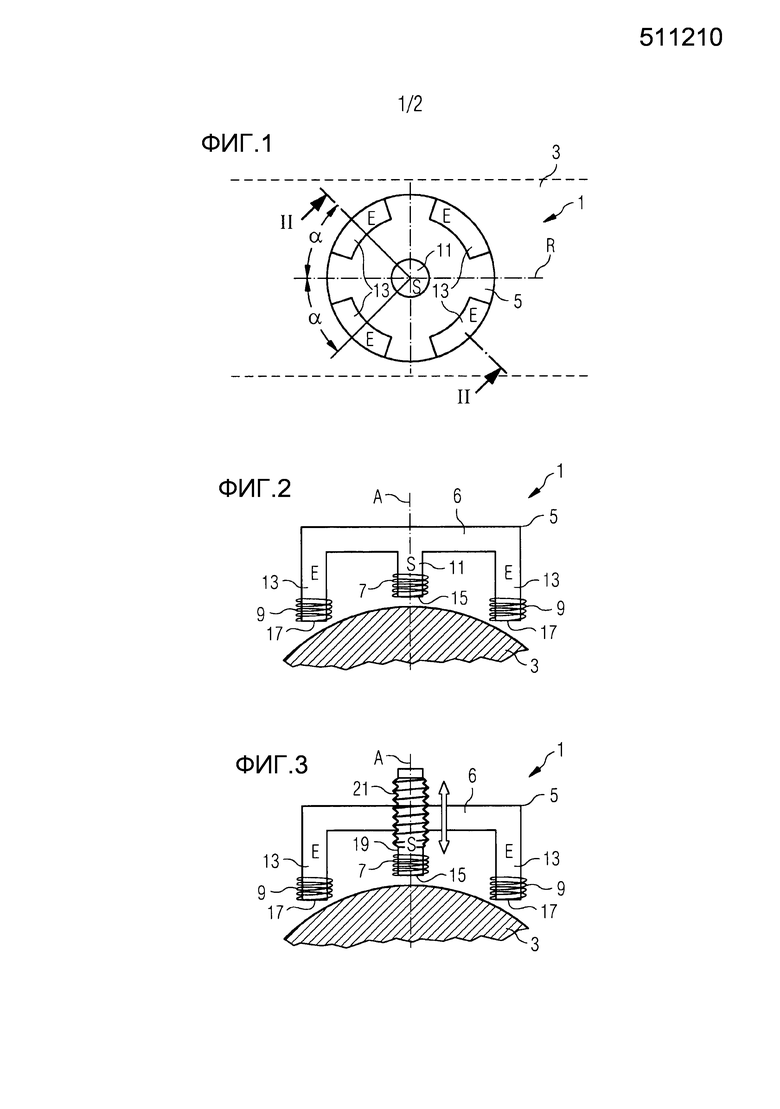
Фиг. 1 - схематичное представление примера выполнения соответствующего изобретению датчика крутящего момента на виде на той стороне, которая должна быть обращена к объекту, крутящий момент которого должен определяться,
Фиг. 2 - датчик крутящего момента по фиг. 1 в сечении вдоль линии II-II.
Фиг. 3 - модификация примера выполнения по фиг. 1 и 2.
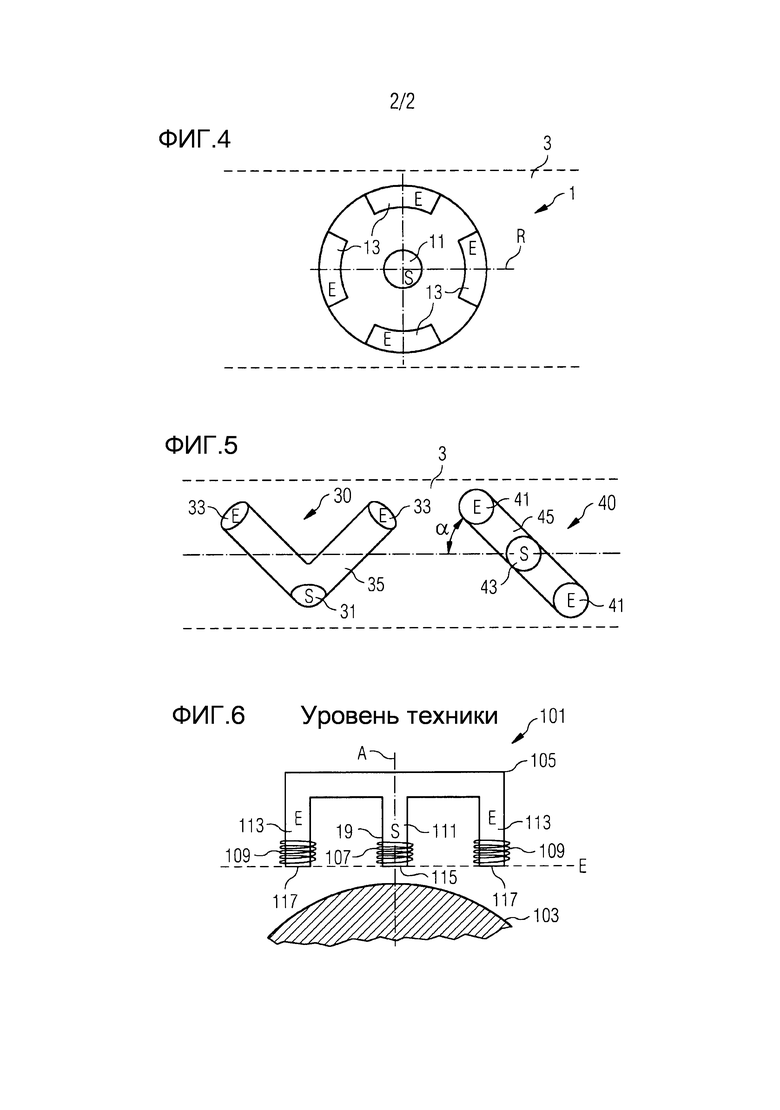
Фиг. 4 - другая модификация примера выполнения по фиг. 1 и 2.
Фиг. 5 - еще одна модификация примера выполнения по фиг. 1 и 2.
Фиг. 6 - датчик крутящего момента согласно уровню техники.
Прежде чем со ссылками на фиг. 1 и 2 будет описан пример выполнения соответствующего изобретению датчика крутящего момента, сначала со ссылкой на фиг. 6 представлено описание магнитоупругого датчика крутящего момента согласно уровню техники. При этом фиг. 6 показывает датчик 101 крутящего момента согласно уровню техники вместе с валом 103, вращающий момент которого должен быть определен, в схематичном представлении.
Датчик 101 крутящего момента согласно уровню техники содержит ферритовый сердечник 105, передающую катушку 107, а также четыре приемные катушки 109, из которых на фиг. 6 можно видеть только две. Передающая катушка 107 и приемные катушки 109 навиты на участок 111 сердечника передающей катушки или участки 109 сердечника приемных катушек, соответственно, ферритового сердечника 105. Катушки имеют, соответственно, осевое направление А, которое обозначено только для передающей катушки 107. Передающая катушка 107 и приемные катушки 109 имеют торцевую плоскость 115 передающей катушки и, соответственно, торцевые плоскости 117 приемных катушек, которые с торцевыми плоскостями соответствующих участков 111, 113 сердечника расположены на одной линии. В датчике крутящего момента согласно уровню техники как торцевая плоскость 115 передающей катушки, так и торцевые плоскости 117 приемных катушек лежат в общей плоскости, которая представлена на фиг. 6 пунктирной линией Е. Тем самым по меньшей мере некоторые торцевые плоскости 117 приемных катушек имеют заметно большее расстояние от вала 103, чем торцевая плоскость 115 передающей катушки. Так как детектированный измеренный сигнал зависит от расстояния и, в частности, с увеличением расстояния ослабляется, выровненная геометрия датчика крутящего момента согласно уровню техники имеет недостаток, состоящий в том, что детектируется более слабый сигнал, чем это было бы возможно при оптимизированной геометрии. Это соответствует тем больше, чем меньше диаметр вала 103 по сравнению с расстоянием передающей катушки от приемных катушек.
Пример выполнения для соответствующего изобретению датчика крутящего момента, при котором только что описанная проблематика не проявляется, далее описывается со ссылками на фиг. 1 и 2, которые показывают датчик 1 крутящего момента вместе с валом 3, крутящий момент которого должен быть измерен. В то время как фиг. 1 показывает датчик 1 крутящего момента при рассмотрении с положения вала 3, фиг. 2 показывает датчик 1 крутящего момента в сечении вдоль линии II-II на фиг. 1.
Соответствующий изобретению датчик 1 крутящего момента, как и датчик крутящего момента согласно уровню техники, содержит ферритовый сердечник 5 с центральным участком 11 сердечника передающей катушки и четырьмя участками 13 сердечника приемных катушек, окружающими участок 11 сердечника передающей катушки, которые в данном примере выполнения имеют форму круговых кольцевых сегментов, но также могут быть выполнены иначе, например в цилиндрической форме. На участке 11 сердечника передающей катушки навита передающая катушка 7, на участки 13 сердечника приемных катушек навиты, соответственно, приемные катушки 9. Все участки сердечника выступают над плоским круговым участком 6 держателя.
В соответствующем изобретению датчике 1 крутящего момента участок 11 сердечника передающей катушки в осевом направлении А передающей катушки 7 короче, чем участки 13 сердечника приемных катушек. За счет этого торцевые плоскости 17 приемных катушек выступают над торцевой плоскостью 15 передающей катушки. Величина, на которую участок 11 сердечника передающей катушки короче, чем участки 13 сердечника приемных катушек, определяется при этом согласно радиусу вала 3, крутящий момент которого должен измеряться. Таким способом можно достичь того, что торцевые плоскости 17 приемных катушек заметно ближе приведены к валу 3, чем это имеет место в датчике 101 крутящего момента согласно уровню техники. Иными словами, за счет осевого смещения передающей катушки 7 относительно приемных катушек 9 при соответственно одинаковом осевом направлении катушек становится возможным согласовать датчик 1 крутящего момента с геометрией объекта измерения, в данном примере выполнения вала 3, таким образом, что передающая катушка 7 и приемные катушки 9 при соответственно одинаковой осевой ориентации катушек оптимально позиционированы на объекте. При этом все катушки находятся по существу на одинаковом расстоянии от объекта.
За счет предварительно изготовленной формы ферритового стержня представленная на фиг. 2 геометрия датчика 1 крутящего момента жестко согласована с геометрией объекта 3, крутящий момент которого должен измеряться. Если желательна более высокая гибкость датчика 1 крутящего момента в отношении применения для различных объектов, крутящие моменты которых должны измеряться, также можно выполнить датчик крутящего момента таким образом, что по меньшей мере передающая катушка 7 может смещаться в своем положении вдоль осевого направления А.
Модификация представленного на фиг. 1 и 2 примера выполнения, которая позволяет смещать передающую катушку 7 вдоль осевого направления А, показана на фиг. 3. На фиг. 3 показан видоизмененный датчик 1 крутящего момента в сечении вдоль линии II-II на фиг. 1. Далее описываются только отличия от датчика крутящего момента, представленного на фиг. 1 и 2. Элементы, которые не отличаются или несущественно отличаются от элементов представленного на фиг. 1 и 2 датчика крутящего момента, на фиг. 3 обозначены теми же ссылочными позициями и повторно не поясняются.
Датчик 1 крутящего момента по фиг. 3 отличается от датчика крутящего момента по фиг. 1 и 2 в первую очередь выполнением ферритового сердечника 5. Последний имеет согласно представленной модификации индивидуальную часть 19 сердечника передающей катушки вместо участка 11 сердечника передающей катушки. На своем конце, противоположном передающей катушке 7, часть 19 сердечника передающей катушки оснащена внешней резьбой 21. Несущий участок 6 ферритового сердечника 5 имеет там, где на представленном на фиг. 1 и 2 примере выполнения размещен участок 11 сердечника передающей катушки, отверстие с внутренней резьбой, в которое ввинчивается часть 19 сердечника передающей катушки. За счет проворачивания части 19 сердечника передающей катушки можно выполнять смещение передающей катушки 7 вдоль осевого направления А. Применение резьбы позволяет осуществлять особо точное позиционирование передающей катушки 7 вдоль осевого направления А. Кроме резьбы также могут использоваться и другие приспособления, с помощью которых часть 19 сердечника передающей катушки можно смещать в осевом направлении А, например каретка, которая может входить в зацепление в нескольких осевых положениях. Также возможна часть сердечника передающей катушки в форме просто штифта, то есть без резьбы, причем эта часть сердечника размещается тогда в не имеющем резьбы отверстии сердечника 5 с возможностью сдвига. Фиксация в желательном положении может осуществляться, например, с помощью одного или нескольких фиксирующих болтов.
Хотя на фиг. 3 только передающая катушка 7 может смещаться вдоль осевого направления А, также существует возможность выполнить одну или несколько приемных катушек 9 с возможностью смещения в осевом направлении. Это может, например, быть предпочтительным, когда датчик крутящего момента должен применяться не только в показанной на фиг. 1 ориентации по отношению к объекту 3 измерения.
Как можно видеть на фиг. 1, приемные катушки 13 размещены попарно, причем каждая пара приемных катушек состоит из двух приемных катушек 13, противолежащих друг другу по отношению к передающей катушке 11. На фиг. 1 соединительные линии обеих пар приемных катушек пересекаются под прямым углом и повернуты на угол α, равный 45°, относительно направления R вращения вала 3. Следствием этого является то, что каждая приемная катушка 13 имеет то же самое расстояние от вала 3, если торцевые плоскости 17 приемных катушек все лежат в той же самой плоскости.
Однако если датчик 1 крутящего момента размещен в ориентации, повернутой относительно ориентации по фиг. 1 на 45° относительно направления R вращения вала 3, как это представлено на фиг. 4, то торцевые плоскости 17 приемных катушек той пары приемных катушек, соединительная линия которых проходит параллельно оси R вращения вала 3, должны лежать в той же плоскости, что и торцевая плоскость 15 передающей катушки. Торцевые плоскости 17 приемных катушек той пары приемных катушек, соединительная линия которых проходит перпендикулярно оси R вращения вала 3, должны, напротив, выступать над торцевой плоскостью 15 передающей катушки и тем самым также над торцевыми плоскостями 17 приемных катушек другой пары приемных катушек, чтобы добиться того, чтобы все торцевые плоскости катушек имели одинаковое расстояние от вала 3.
Хотя вышеописанные магнитоупругие датчики крутящего момента имеют соответственно две пары приемных катушек, у которых соединительная линия между приемными катушками пары пересекает соединительную линию между приемными катушками другой пары под прямым углом, также существует возможность того, что эти соединительные линии пересекаются под другим углом, чем прямой угол. Кроме того, возможны магнитоупругие датчики крутящего момента с менее или более чем четырьмя приемными катушками. Примеры подобных модификаций представлены на фиг. 5. Фиг. 5 показывает две возможные модификации, которые имеют соответственно только две приемные катушки.
В варианте, показанном на фиг. 3 слева, приемные катушки 33 вместе с передающей катушкой 31 размещены на ферритовом сердечнике 35, сконфигурированном, при наблюдении от вала 3, в V-образной форме. При этом, по аналогии с фиг. 1 и 4, обе торцевые плоскости приемных катушек могут лежать в общей плоскости, которая выступает над торцевой плоскостью передающей катушки (если имеет место ориентация по фиг. 5), либо торцевая плоскость передающей катушки и одна из торцевых плоскостей 17 приемных катушек могут лежать в общей плоскости, причем тогда торцевая плоскость другой приемной катушки выступает над этой плоскостью. Эта конфигурация особенно тогда целесообразна, когда датчик 30 крутящего момента повернут относительно показанной на фиг. 5 конфигурации на 45° вокруг оси передающей катушки.
Другой возможный вариант магнитоупругого датчика крутящего момента показан на фиг. 5 справа. Этот датчик крутящего момента имеет линейную конфигурацию, причем приемные катушки размещены на концах линейного несущего участка сердечника 45, в середине которого находится передающая катушка 43. При показанной на фиг. 5 ориентации торцевые плоскости приемных катушек выступают над торцевой плоскостью передающей катушки. При этом величина выступания зависит от того, какой угол α образует соединительная линия между торцевыми плоскостями приемных катушек с осью вращения вала 3.
Магнитоупругий датчик крутящего момента, описанный в качестве примера со ссылками на фиг. 1-5, обеспечивает повышенную точность измерения крутящего момента посредством оптимального согласования расстояния всех катушек относительно объекта измерения, в особенности при одинаковой осевой ориентации катушек, и тем самым может применяться в особенности для малых диаметров вала или конструкции больших геометрий головок датчиков.
При применении больших головок датчиков по отношению к диаметру объекта измерения предпочтительным является позиционирование катушек на вогнутой поверхности, чтобы иметь возможность привести все катушки по возможности близко к поверхности объекта измерения. Тем самым достигается повышение чувствительности сигнала измеренного сигнала.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСКОНТАКТНЫЙ ПРЕЦИЗИОННЫЙ ДИНАМИЧЕСКИЙ ДАТЧИК КРУТЯЩЕГО МОМЕНТА | 2024 |
|
RU2831515C1 |
| СИСТЕМА ДАТЧИКОВ ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА И ВАЛ С СИСТЕМОЙ ДАТЧИКОВ ДЛЯ ИЗМЕРЕНИЯ КРУТЯЩЕГО МОМЕНТА | 2012 |
|
RU2563604C2 |
| РЕАКТИВНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ И СПОСОБ НАМОТКИ РЕАКТИВНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2004 |
|
RU2347311C2 |
| МЕХАНИЧЕСКОЕ ОПОРНОЕ УСТРОЙСТВО И СОДЕРЖАЩИЙ ЕГО ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2006 |
|
RU2404492C2 |
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| МАГНИТОУПРУГИЙ ДАТЧИК КРУТЯЩЕГО МОМЕНТА ВАЛА | 2006 |
|
RU2357219C2 |
| СПОСОБ ИЗМЕРЕНИЙ УГЛОВЫХ ОТКЛОНЕНИЙ ВРАЩАЮЩЕГОСЯ РОТОРА ТРЕХСТЕПЕННОГО ГИРОСКОПА ОТНОСИТЕЛЬНО ЕГО КОРПУСА И СКОРОСТИ ВРАЩЕНИЯ РОТОРА | 2017 |
|
RU2698493C2 |
| СТИРАЛЬНАЯ МАШИНА | 2012 |
|
RU2575860C2 |
| Способ измерения сложных механических деформаций с помощью аморфной металлической ленты и устройство для калибровки чувствительного элемента | 2018 |
|
RU2708695C1 |
| МАГНИТНАЯ МУФТА, СЦЕПНОЕ УСТРОЙСТВО И СПОСОБ | 2015 |
|
RU2666771C2 |
Предложен магнитоупругий датчик (1) крутящего момента. Отличительной особенностью изобретения является то, что торцевые плоскости 17 приемных катушек той пары приемных катушек, соединительная линия которых проходит параллельно оси R вращения вала 3, должны лежать в той же плоскости, что и торцевая плоскость 15 передающей катушки. Торцевые плоскости 17 приемных катушек той пары приемных катушек, соединительная линия которых проходит перпендикулярно оси R вращения вала 3, должны, напротив, выступать над торцевой плоскостью 15 передающей катушки и тем самым также над торцевыми плоскостями 17 приемных катушек другой пары приемных катушек, чтобы добиться того, чтобы все торцевые плоскости катушек имели одинаковое расстояние от вала 3. Технический результат - оптимизация геометрии и соответственно возможность предпочтительного позиционирования и ориентирования магнитоупругого датчика крутящего момента для осуществления более точного измерения. 6 з.п. ф-лы, 6 ил.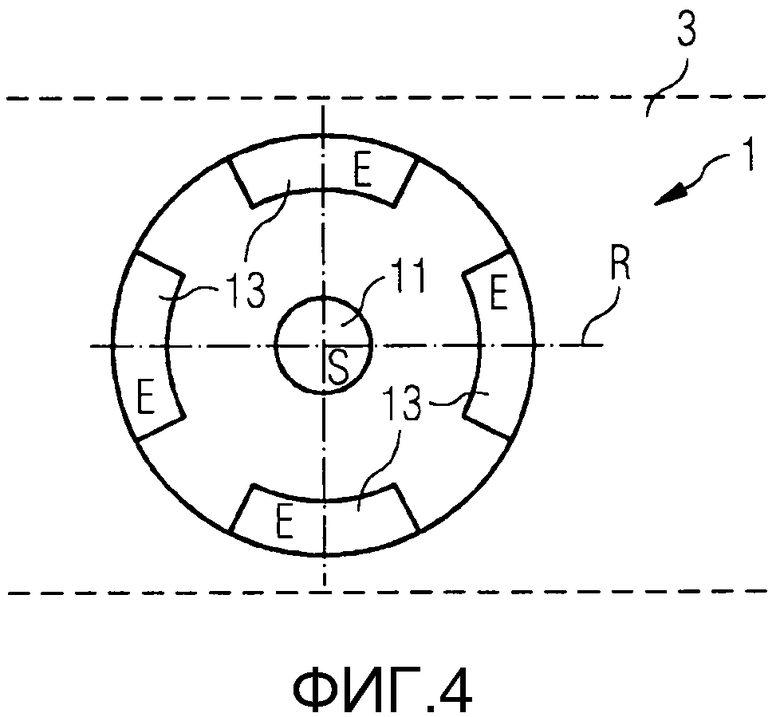
1. Магнитоупругий датчик (1, 30, 40) крутящего момента, содержащий
передающую катушку (7, 31, 41) для генерирования магнитного поля в объекте (3), крутящий момент которого должен определяться, причем передающая катушка (7, 31, 41) имеет осевое направление (А) и осевую торцевую плоскость (15) передающей катушки, подводимую к объекту (3), и
по меньшей мере две приемные катушки (9, 33, 43), разнесенные относительно передающей катушки, которые имеют, соответственно, торцевую плоскость (17) приемной катушки, подводимую к объекту (3), и принимают ответный сигнал, индуцированный в объекте (3) магнитным полем передающей катушки (7, 31, 41),
причем по меньшей мере торцевая плоскость (17) одной из приемных катушек выступает над торцевой плоскостью (15) передающей катушки,
причем имеются две пары приемных катушек, окружающих передающую катушку (7), из которых каждая пара имеет две приемные катушки (9), размещенные на противолежащих друг другу сторонах окружности передающей катушки (17), которые имеют, соответственно, приводимую к объекту (3) торцевую плоскость (17) приемной катушки и принимают ответный сигнал, индуцированный в объекте (3) магнитным полем передающей катушки (7), причем по меньшей мере торцевые плоскости (17) приемных катушек (9) пары приемных катушек выступают над торцевой плоскостью (15) передающей катушки, отличающийся тем, что торцевые плоскости (17) приемных катушек пары приемных катушек расположены на одной линии с торцевой плоскостью (15) передающей катушки.
2. Датчик (1) крутящего момента по п. 1, в котором пары приемных катушек размещены под прямым углом друг к другу.
3. Датчик (1, 30, 40) крутящего момента по п. 1, в котором передающая катушка (7, 31, 41) и/или приемные катушки (9, 33, 43) имеют сердечник (5, 35, 45).
4. Датчик (1, 30, 40) крутящего момента по п. 3, в котором передающая катушка (7, 31, 41) и приемная катушка (1, 30, 40) размещены на общем сердечнике (5, 35, 45), который имеет участок (11) сердечника передающей катушки и участки (13) сердечника приемных катушек, причем участок сердечника передающей катушки и участки (13) сердечника приемных катушек имеют торцевые плоскости сердечника, которые расположены на одной линии с торцевой плоскостью (15) передающей катушки или торцевыми плоскостями (17) приемных катушек.
5. Датчик (1) крутящего момента по п. 1, в котором по меньшей мере положение торцевой плоскости (15) передающей катушки по отношению к торцевым плоскостям (17) приемных катушек может перемещаться вдоль осевого направления (А) передающей катушки (7).
6. Датчик (1) крутящего момента по пп. 4 и 5, в котором имеется механизм (21) перемещения для перемещения участка (11) сердечника передающей катушки с размещенной на нем передающей катушкой (7) вдоль осевого направления (А) передающей катушки (7).
7. Датчик (1) крутящего момента по п. 6, в котором
участок (11) сердечника передающей катушки выполнен, в противоположность остальному сердечнику (5), как индивидуальная часть (19) сердечника, которая на своем конце, противоположном передающей катушке (7), снабжена резьбой (21), и
остальной сердечник (5) имеет тогда сопряженную резьбу, взаимодействующую с резьбой (21) упомянутой части (19) сердечника.
| Устройство для контроля целостности изделий | 1960 |
|
SU136086A1 |
| DE 102006017727 A1, 25.10.2007; | |||
| 0 |
|
SU168692A1 | |
| US 6422095 B1, 23.07.2002. | |||

