Предлагаемый способ управления может быть использован в космической технике при сближении и последующей стыковке двух космических объектов, находящихся на орбитах различных небесных тел, например космического корабля (КК), находящегося на орбите вокруг Земли в качестве активного космического объекта (АКО) и орбитальной станции (ОС), находящейся на орбите вокруг любого небесного тела, например Луны (ЛОС) в качестве пассивного космического объекта (ПКО).
Известен способ управления, выбранный в качестве аналога, в котором для обеспечения сближения и последующей стыковки двух космических объектов, АКО выводится в плоскость орбиты ПКО. После выведения АКО переводится на так называемую орбиту фазирования, располагающуюся между начальной орбитой АКО и орбитой ПКО для ликвидации начального углового рассогласования между двумя объектами, т.к. находясь на разных орбитах, АКО и ПКО имеют разные угловые скорости вращения вокруг небесного тела. После нескольких витков (число определяется выбранной баллистической схемой сближения) АКО, с помощью двухимпульсного маневра, переводится в окрестность ПКО, где сближение завершается автоматической стыковкой. Такой способ управления активным кораблем применяется при сближении и стыковке КК с ОС [1. Р.Ф. Аппазов, О.Г. Сытин «Методы проектирования траекторий носителей и спутников Земли», Наука, Москва, 1987]. Основным недостатком такого способа управления является то, что для перехода АКО с орбиты выведения на орбиту ПКО и проведения сближения необходимо затратить дополнительное топливо на переход с орбиты фазирования на орбиту ПКО и время на проведение фазирования.
Известен способ управления, выбранный в качестве прототипа, включающий последовательное приложение к АКО, находящемуся на орбите одного небесного тела отлетного импульса Vотл и тормозного импульса Vторм для перехода на орбиту другого небесного тела с заданными параметрами по высоте и положению плоскости орбиты. Такой способ управления активным кораблем применялся при проведении лунных миссий по программе "Apollo" [2. В.И. Левантовский "Механика космического полета в элементарном изложении", Наука, Москва, 1970].
Первый отлетный импульс Vотл переводит АКО с орбиты искусственного спутника Земли (ИСЗ) на переходную орбиту по траектории отлета к Луне, обеспечивая по окончанию перелета заданное положение плоскости орбиты, определяемой наклонением i и долготой восходящего узла ΩВУ, а также требуемую высоту периселения. Второй тормозной импульс Vторм, выполняемый в периселении против вектора скорости, обеспечивает переход АКО на целевую орбиту искусственного спутника Луны (ИСЛ) с заданными параметрами по высоте.
Недостатком этого способа является малая вероятность попадания АКО сразу в окрестность ПКО, что потребует дополнительного времени и топлива на последующее фазирование для окончательного сближения объектов.
Техническим результатом изобретения являются сокращение продолжительности сближения с ПКО, находящемся на орбите другого небесного тела и снижение затрат топлива на сближение.
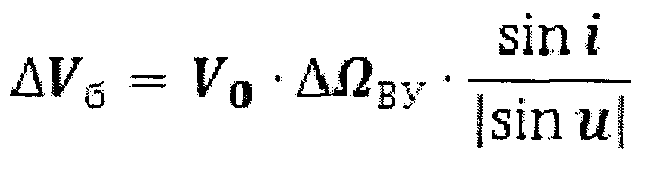
Технический результат достигается благодаря тому, что в способе управления движением АКО, стыкуемого с ПКО, включающем последовательное приложение к АКО, находящемуся на орбите одного небесного тела отлетного импульса Vотл и тормозного импульса Vторм для перехода на орбиту другого небесного тела с заданными параметрами по высоте и положению плоскости орбиты, в отличие от известного, перед переводом АКО на траекторию полета к другому небесному телу, величину и место приложения отлетного импульса Vотл определяют исходя из условия пересечения АКО орбиты ПКО при одновременном нахождении объектов в окрестности точки пересечения орбит, после чего АКО переводят на орбиту другого небесного тела путем одновременного приложения к нему тормозного импульса Vторм для обеспечения заданных параметров по высоте орбиты и бокового импульса ΔVб для совмещения плоскостей орбит стыкующихся объектов, рассчитываемого по формуле

где V0 - орбитальная скорость вращения ПКО вокруг другого небесного тела;
ΔΩВУ - разница долгот восходящих узлов орбит стыкующихся объектов;
i - наклонение орбиты ПКО;
u - аргумент широты ПКО в точке пересечения орбит стыкующихся объектов.
Технический результат в предлагаемом способе управления достигается тем, что отлетный импульс Vотл определяется исходя из условия, что АКО и ПКО, имея рассогласование между плоскостями орбит, одновременно приходят в окрестность точки пересечения орбит в момент выполнения тормозного импульса Vторм. После одновременного приложения тормозного импульса Vторм и бокового импульса ΔVб, угол между плоскостями орбит АКО и ПКО ликвидируется. В результате АКО оказывается в окрестности ПКО без дополнительных затрат топлива и времени на проведение фазирования и последующее сближение. Сущность изобретения поясняется фиг.1÷4 и табл.1÷2,
где на фиг.1 показана схема сближения КК, в качестве АКО с ОС, в качестве ПКО;
на фиг.2 показана схема выведения КК "Apollo-11" с околоземной орбиты на целевую окололунную орбиту;
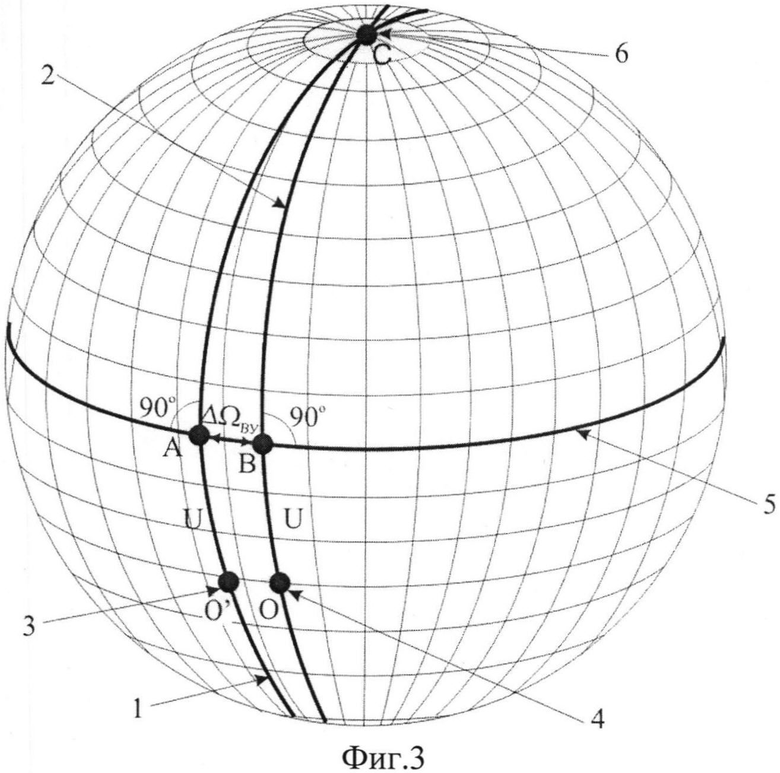
фиг.3 показывает взаимную геометрию орбит КК и ЛОС, находящихся на полярных орбитах (i=90°) с разницей по долготе восходящего узла орбиты ΔΩВУ,
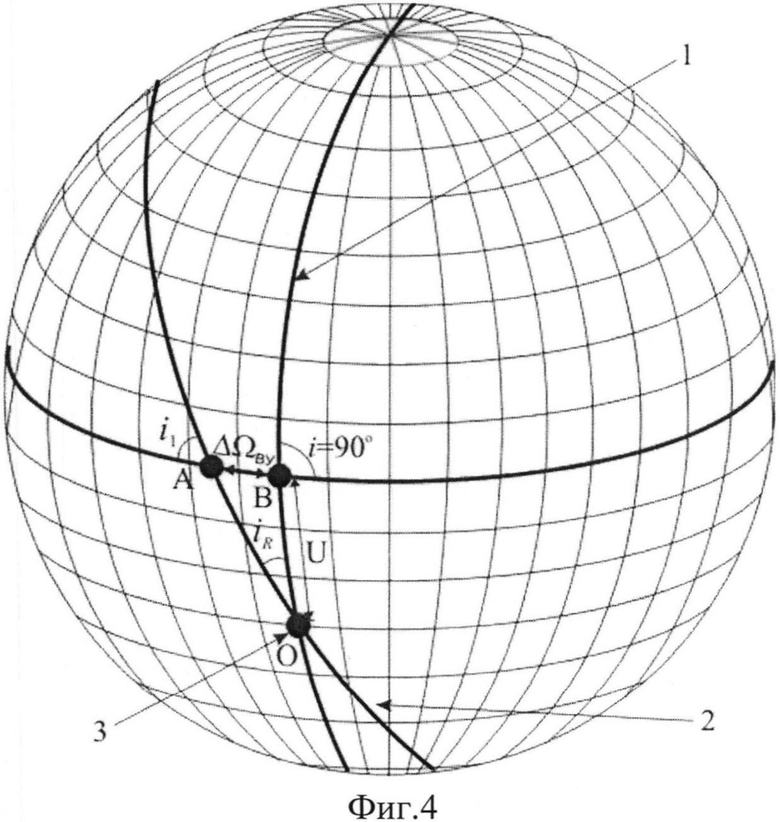
фиг.4 показывает взаимную геометрию пересекающихся орбит КК и ЛОС с различным наклонением и положением восходящих узлов орбиты;
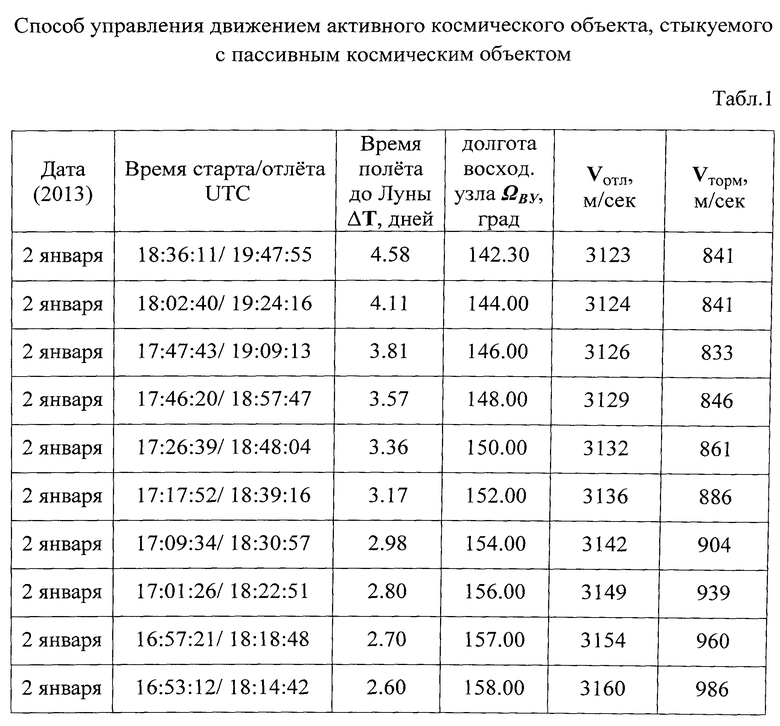
в табл.1 для гипотетического случая представлены результаты численного интегрирования плоского перелета на полярную орбиту ИСЛ с наклонением i=90°, включающие время старта с Земли и время выдачи отлетного импульса Vотл к Луне в UTC (Universal Time Coordinated), время перелета ΔT, долготу восходящего узла орбиты ΩВУ, величины отлетного импульса Vотл и тормозного импульса Vторм;
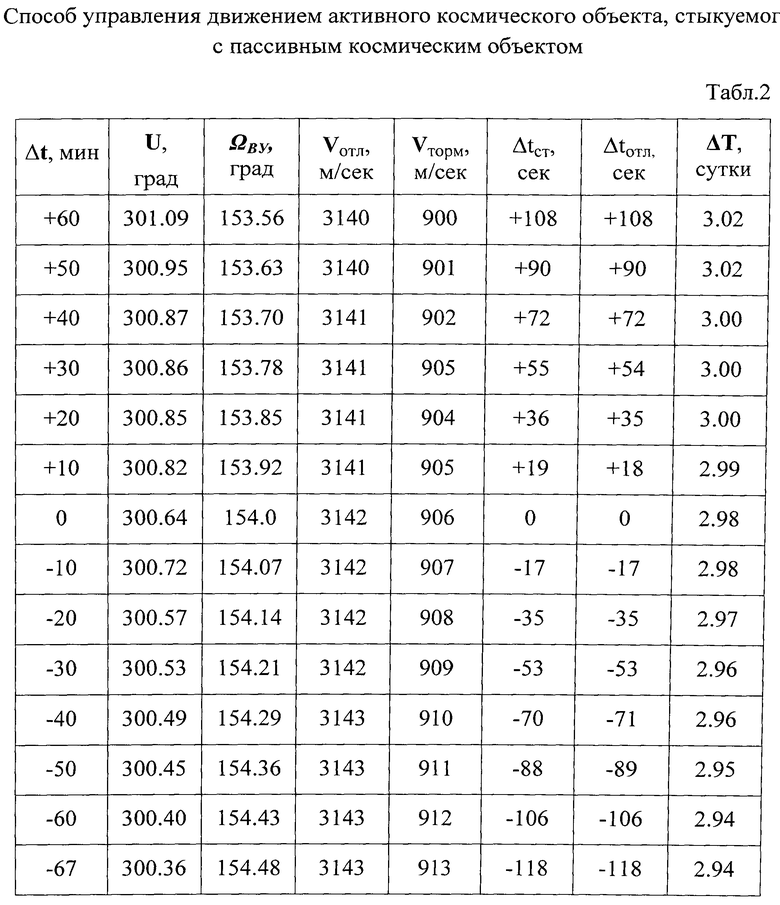
в табл.2 представлены характеристики перелетов с различным временем прихода на орбиту ИСЛ относительно номинального перелета на полярную орбиту ИСЛ с долготой восходящего узла ΩВУ=154°, представленного в табл.1, где Δt - относительное изменение времени прихода на орбиту ИСЛ, u - аргумент широты точки прилета, ΩВУ - долгота восходящего узла орбиты, величины отлетного импульса VOTJ1 и тормозного импульса Vторм, Δtст и Δtотл - изменение времени старта и времени выдачи отлетного импульса Vотл по сравнению с номинальным перелетом, ΔT - время перелета к Луне.
На фиг.1 показана известная схема сближения КК с ОС. КК выводится на орбиту (поз.1), совпадающую с плоскостью орбиты ОС (поз.2) с начальным фазовым углом Ф. После проведения первого двухимпульсного маневра (V1 и V2) КК переходит на орбиту фазирования (поз.3), для ликвидации углового рассогласования, после чего, посредством проведения двухимпульсного маневра (V3 и V4), осуществляется переход КК в окрестность ОС (поз.4).
На фиг.2 показана известная схема перелета КК "Apollo-11" на орбиту ИСЛ. Вначале КК выводится (поз.1) на орбиту ИСЗ (поз.2). Первым отлетным импульсом Vотл КК переводится на переходную орбиту (поз.3) для перелета к Луне. Величина этого импульса ~3150 м/с. Длительность перелета ~3.5 дня. По достижении периселения орбиты вокруг Луны вторым тормозным импульсом Vторм (~900 м/с), направленным против скорости движения, КК переводится на орбиту ИСЛ (поз.4).
На фиг.3 представлено сферическое изображение пересекающихся полярных орбит КК (поз.1) и ЛОС (поз.2), отличающимися по долготе восходящего узла орбиты на угол ΔΩВУ. В момент приложения к КК тормозного импульса Vторм и перехода на целевую орбиту (точка О′) (поз.3) ЛОС находится в точке О (поз.4) с тем же угловым расстоянием U до экватора (поз.5). Точка пересечения орбит, в которой необходимо приложить импульс для совмещения плоскостей орбит КК и ЛОС, находится на полюсе (точка С) (поз.6).
На фиг.4 представлено сферическое изображение двух пересекающихся орбит. Полярной орбите ЛОС (поз.1) с наклонением i=90° принадлежит дуга  с длиной U, а орбите КК (поз.2) дуга
с длиной U, а орбите КК (поз.2) дуга  (наклонение i1≠90°). За счет отличия в наклонении орбиты КК и варьирования времени прилета КК в точку перехода на целевую орбиту ИСЛ, можно обеспечить одновременный приход ЛОС и КК в окрестность точки О (поз.3).
(наклонение i1≠90°). За счет отличия в наклонении орбиты КК и варьирования времени прилета КК в точку перехода на целевую орбиту ИСЛ, можно обеспечить одновременный приход ЛОС и КК в окрестность точки О (поз.3).
В качестве примера представлена задача сближения КК с ЛОС, находящейся на полярной орбите ИСЛ с наклонением i=90°. КК начинает полет к Луне с круговой орбиты ИСЗ высотой Нкр=200 км и наклонением 51.6° по плоской траектории. Для определения импульсов перелета используется ограниченная круговая задача трех тел [3. "Основы теории полета космических аппаратов", под ред. Г.С. Нариманова и М.К. Тихонравова, Москва, «Машиностроение», 1972] с движением КК в поле тяготения Земли и Луны, решаемая численным интегрированием. Схема энергетически оптимального плоского перелета включает в себя два трансверсальных импульса. Первым отлетным импульсом Vотл КК переводится на переходную орбиту для перелета к Луне. Так как радиус орбиты Луны составляет около 384000 км, то для гомановского перехода на высокоэллиптическую орбиту, достигающую в апогее Луну, необходимо приложить отлетный импульс [1]
 ,
,
где µ - гравитационная постоянная Земли, rн - радиус начальной орбиты, rк - радиус конечной орбиты, который приблизительно равен радиусу лунной орбиты. При этом максимально возможное время перелета составляет половину периода Т орбиты перелета, где  и
и  - большая полуось орбиты перелета к Луне [1]. Через время перелета ΔT~5 суток, равное половине периода орбиты перелета, КК достигает окрестность Луны.
- большая полуось орбиты перелета к Луне [1]. Через время перелета ΔT~5 суток, равное половине периода орбиты перелета, КК достигает окрестность Луны.
Согласно задаче Ламберта [1] перелет может быть совершен и за меньшее время за счет небольшого увеличения отлетного импульса Vотл. Например, превышение отлетного импульса на 50 м/с, по сравнению с минимально необходимым для гомановского перехода, приводит к достижению КК окрестности Луны за 2.5 суток [3].
Скорость КК в апогее переходной высокоэллиптической орбиты составит  . При подлете к Луне основное влияние на движение КК начинает оказывать гравитационное поле Луны. Относительно Луны скорость КК Vα будет превышать местную параболическую скорость, т.е. 2-ую космическую скорость для Луны. Поэтому вторым тормозным импульсом Vторм КК переводится на орбиту ИСЛ. Величина этого импульса около 900 м/с и рассчитывается как Vторм=Vα-V0, где V0~1730 м/с - орбитальная скорость ИСЛ [3]. Плоский двухимпульсный перелет в любую дату обеспечивает переход на окололунную орбиту с заданным наклонением i и высотой, но при этом плоскость орбиты, определяемая долготой восходящего узла ΩВУ, может отличаться от плоскости целевой орбиты ЛОС. Каждый день, за счет естественного вращения Луны вокруг своей оси, достижимая долгота восходящего узла ΩВУ при перелете КК с Земли будет изменять свое значение на ~13.2° [3]. Таким образом, в течение лунного месяца (период 28.5 дня) появляется возможность решить задачу с плоским перелетом от Земли к Луне на орбиту ИСЛ с заданным наклонением i и временем перелета ΔT с точностью по долготе ΩВУ в 13-14°. Варьируя длительностью перелета ΔT в пределах ±1 день, за счет незначительного изменения величины отлетного импульса Vотл можно решить точную задачу выхода на окололунную орбиту с заданной долготой восходящего узла ΩВУ.
. При подлете к Луне основное влияние на движение КК начинает оказывать гравитационное поле Луны. Относительно Луны скорость КК Vα будет превышать местную параболическую скорость, т.е. 2-ую космическую скорость для Луны. Поэтому вторым тормозным импульсом Vторм КК переводится на орбиту ИСЛ. Величина этого импульса около 900 м/с и рассчитывается как Vторм=Vα-V0, где V0~1730 м/с - орбитальная скорость ИСЛ [3]. Плоский двухимпульсный перелет в любую дату обеспечивает переход на окололунную орбиту с заданным наклонением i и высотой, но при этом плоскость орбиты, определяемая долготой восходящего узла ΩВУ, может отличаться от плоскости целевой орбиты ЛОС. Каждый день, за счет естественного вращения Луны вокруг своей оси, достижимая долгота восходящего узла ΩВУ при перелете КК с Земли будет изменять свое значение на ~13.2° [3]. Таким образом, в течение лунного месяца (период 28.5 дня) появляется возможность решить задачу с плоским перелетом от Земли к Луне на орбиту ИСЛ с заданным наклонением i и временем перелета ΔT с точностью по долготе ΩВУ в 13-14°. Варьируя длительностью перелета ΔT в пределах ±1 день, за счет незначительного изменения величины отлетного импульса Vотл можно решить точную задачу выхода на окололунную орбиту с заданной долготой восходящего узла ΩВУ.
Для демонстрации сказанного, в табл.1 представлены характеристики перелета на орбиту ИСЛ с орбиты ИСЗ. Рассматривалась задача выведения КК с космодрома Байконур на круговую орбиту ИСЗ с параметрами Нкр=200 км и наклонением i=51.6° с последующей выдачей отлетного импульса Vотл к Луне. По достижении периселения, на расстоянии 200 км от поверхности Луны к КК прикладывался тормозной импульс Vторм, переводящий КК на круговую полярную орбиту ИСЛ с наклонением i=90° и высотой орбиты Нкр=200 км. Время перелета к Луне AT варьировалось от 4.5 суток до 2.5 суток для того, чтобы обеспечить необходимое значение долготы восходящего узла ΩВУ, соответствующее плоскости целевой орбиты ЛОС. Все расчеты проводились с использованием программного комплекса Satellite Tool Kit 9.0. Будем в дальнейшем изложении предполагать, что орбита ЛОС располагается в момент прилета КК в плоскости ИСЛ с ΩВУ=154°, что соответствует длительности перелета ΔТ=2.98 суток.
После выполнения тормозного импульса Vторм и перехода КК на орбиту ПКО необходимо проведение дополнительного фазирования, аналогичное сближению КК с ОС, так как весьма мала вероятность попадания АКО в окрестность ПКО. Это потребует дополнительного времени и топлива на последующее сближение.
Можно избежать дополнительного фазирования КК, обеспечив приход ЛОС на аргумент широты u в момент выдачи тормозного импульса Vторм для перехода КК на целевую орбиту (т.О′ фиг.3). Этот результат можно достичь незначительным варьированием времени прилета КК в периселений. В табл.2 представлены характеристики перелета относительно номинального перелета на орбиту Луны 2 января 2013 года с долготой восходящего узла ΩВУ=154°. Так как длительность витка на круговой лунной орбите высотой Нкр=200 км составляет 127.5 мин, то для охвата всех возможных фазовых углов в диапазоне ±180° на момент прилета КК на целевую орбиту ЛОС в таблице представлены данные с дискретным сдвигом относительно номинального прилета КК в периселений ±10 минут.
Как видно из табл.2, максимальное значение расхождения по долготе восходящего узла орбиты КК ΩВУ от номинального значения ΩВУ для ЛОС составляет около 0.5° и может быть ликвидировано боковым импульсом ΔVб в точках пересечения орбит стыкующихся объектов, расположенных, в случае полярной орбиты ЛОС, над полюсами Луны - т.С (см. фиг.3), что потребует дополнительно полета от точки выдачи тормозного импульса Vторм до точки пересечения около полвитка. Предельные затраты характеристической скорости на боковой импульс ΔVб для ликвидации углового рассогласования ΔΩВУ~0.5° составляют 10-12 м/с.
Чтобы сократить затраты топлива КК на проведение бокового импульса ΔVб и время полета до стыковки предлагается совместить выполнение бокового импульса ΔVб одновременно с тормозным импульсом Vторм. Для этого необходимо обеспечить два условия. Во-первых, точка пересечения орбиты ЛОС и переходной орбиты КК должна находиться на аргументе широты точки прилета КК в периселений, во-вторых, время прихода КК в периселений должно совпасть с временем прохождения ЛОС точки пересечения орбит (поз.4 фиг.4).
Как следует из табл.2, аргумент широты точки прилета КК соответствует u~300°, характерный для «южных» траекторий полета к Луне [3]. Первое условие предлагается выполнить за счет незначительного изменения наклонения переходной орбиты КК. В этом случае ближайшая точка пересечения орбит КК и ЛОС, в которой производится приложение тормозного импульса Vторм, переместится с полюса (поз.6 фиг.3) в поз.3 (фиг.4). Второе условие, характеризующее фазовое рассогласование, можно выполнить выбором из табл.2 соответствующего варианта сдвига по времени прилета КК в окрестность Луны.
Определим потребное значение наклонения i1 переходной орбиты КК и предельные затраты характеристической скорости на боковой импульс ΔV.
Для этого воспользуемся вариантом орбиты с прилетом КК в периселений с максимальным отклонением по долготе восходящего узла QBy от долготы восходящего узла ЛОС, т.е. с Δt=-67 мин и u~300° (табл.2). На фиг.4 представлена точка пересечения двух орбит (ЛОС и КК) на заданном аргументе широты (т.О). Рассмотрим сферический треугольник ΔАОВ. Дуга принадлежит орбите КК с наклонением i1. Дуга  принадлежит орбите ЛОС с наклонением i=90°. По условию задачи длины этих дуг U практически одинаковы (КК и ЛОС находятся на одном аргументе широты u~300°). Дуга
принадлежит орбите ЛОС с наклонением i=90°. По условию задачи длины этих дуг U практически одинаковы (КК и ЛОС находятся на одном аргументе широты u~300°). Дуга  определяется разностью между долготами восходящих узлов ΔΩВУ обеих орбит (в нашем примере ΔΩВУ~0.5°). Угол iR - угол между плоскостями.
определяется разностью между долготами восходящих узлов ΔΩВУ обеих орбит (в нашем примере ΔΩВУ~0.5°). Угол iR - угол между плоскостями.
Из решения узких сферических треугольников [4. К.А. Куликов «Курс сферической астрономии» изд. Физ-мат литературы, Москва, 1961]
siniR·sinU=sinΔΩВУ·sini
и, ввиду малости iR и ΔΩВУ
т.к. u=360°-U, то sinu=-sinU и
Так как варианту с Δt=-67 мин соответствует ΔΩВУ=0.48°, то угол между плоскостями орбит КК и ЛОС составит iR=0.55° или ~0.01 радиан.
Наклонение КК i1 определяем, используя уравнение косинусов для сферического треугольника ΔАОВ.
cosi1=-cosiR·cosi+siniR·sini·cosU
или, с учетом малости iR
i1=arccos(-cosi+iR·sini·cosU).
Таким образом, потребное наклонение i1 орбиты прилета КК в случае ЛОС на полярной орбите составит 89.73°, а величина бокового импульса

Формирование наклонения лунной орбиты и восходящего узла орбиты обеспечивается моментом выдачи и величиной отлетного импульса Vотл. Переход на окололунную орбиту обеспечивается тормозным импульсом Vторм. На фоне большого (~900 м/с) тормозного импульса Vторм [3] боковой импульс ΔVб~17 м/с увеличит суммарный импульс на величину

Таким образом, использование предложенного способа позволяет отказаться от фазирования на орбите другого небесного тела, за счет прямого перехода в окрестность орбитальной станции и существенно сэкономит топливо КК на сближение.

Изобретение относится к космической технике и может быть использовано при сближении и последующей стыковке двух космических объектов. Способ включает определение величины и места приложения отлетного импульса перед переводом активного космического аппарата (АКО) на траекторию полета к другому небесному телу, исходя из условия пересечения АКО орбиты пассивного космического аппарата (ПКО). Затем АКО переводят на орбиту другого небесного тела путем одновременного приложения к нему тормозного импульса (для обеспечения заданных параметров по высоте орбиты) и бокового импульса (для совмещения плоскостей орбит стыкующихся объектов). На фоне большого тормозного импульса незначительный боковой импульс практически не приведет к увеличению затрат топлива АКО, но существенно сократит время полета АКО до стыковки с ПКО. Техническим результатом изобретения является сокращение продолжительности сближения с ПКО и снижение затрат топлива. 4 ил., 2 табл.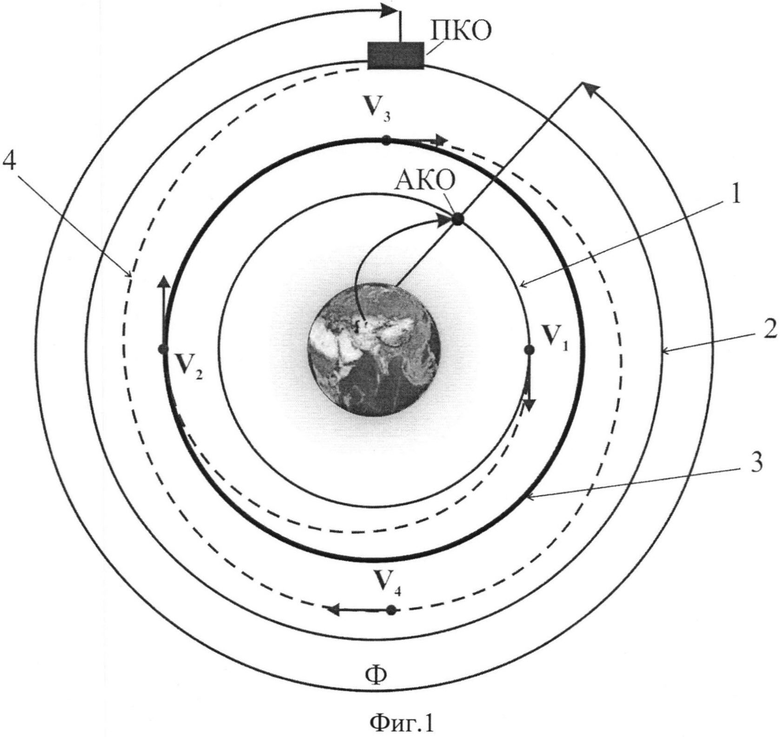
Способ управления движением активного космического объекта, стыкуемого с пассивным космическим объектом, включающий последовательное приложение к активному космическому объекту, находящемуся на орбите одного небесного тела отлетного импульса Vотл и тормозного импульса Vторм для перехода на орбиту другого небесного тела с заданными параметрами по высоте и положению плоскости орбиты, отличающийся тем, что перед переводом активного космического объекта на траекторию полета к другому небесному телу, величину и место приложения отлетного импульса Vотл определяют исходя из условия пересечения активным космическим объектом орбиты пассивного космического объекта при одновременном нахождении объектов в окрестности точки пересечения орбит, после чего активный космический объект переводят на орбиту другого небесного тела путем одновременного приложения к нему тормозного импульса Vторм для обеспечения заданных параметров по высоте орбиты и бокового импульса ΔVб для совмещения плоскостей орбит стыкующихся объектов, рассчитываемого по формуле
где V0 - орбитальная скорость вращения пассивного космического объекта вокруг другого небесного тела;
ΔΩВУ - разница долгот восходящих узлов орбит стыкующихся объектов;
i - наклонение орбиты пассивного космического объекта;
u - аргумент широты пассивного космического объекта в точке пересечения орбит стыкующихся объектов.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ АКТИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА, СТЫКУЕМОГО С ПАССИВНЫМ КОСМИЧЕСКИМ ОБЪЕКТОМ | 2010 |
|
RU2440281C1 |
| US 20130140403 A1, 06.06.2013 | |||
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ ОЧИСТКИ КОСМОСА ОТ ПАССИВНЫХ КА И ИХ ФРАГМЕНТОВ | 1998 |
|
RU2141436C1 |
| US 5421540 A, 06.06.1995 | |||

