Область техники
Изобретение относится к области разработки и применения мобильных беспилотных авиационных комплексов с беспилотными летательными аппаратами самолетного типа с парашютной посадкой, предназначенными для воздушного наблюдения, разведки, обнаружения, целеуказания и лазерной подсветки целей для наведения управляемых боеприпасов. Беспилотный летательный аппарат может быть использован в гражданских областях, например, при обнаружении чрезвычайных ситуаций и ликвидации их последствий.
Уровень техники
В беспилотной авиации парашютные системы посадки применяются как для штатного приземления беспилотных летательных аппаратов, так и для их аварийной посадки.
Известен беспилотный летательный аппарат с парашютной системой посадки по патенту на изобретение РФ RU 2456211, опубликованному 20.07.2012. Он содержит фюзеляж, две консоли крыла и парашютную систему посадки, включающую вытяжной парашют, основной парашют, стропы и подвесную систему. Парашютная система размещена внутри фюзеляжа. Стропы парашютной системы уложены в общем защитном чехле, а стропы подвесной системы прикреплены к концевым частям крыла с помощью трехстепенных шарниров и держателей. Части консоли крыла выполнены с возможностью их поворота относительно оси, параллельной хорде крыла, и снабжены замками-фиксаторами. В полете стропы подвесной системы уложены в канале, расположенном справа и слева вдоль фюзеляжа и вдоль консолей крыла. Для посадки после остановки двигателя по команде оператора наземного пункта управления осуществляют открытие створок вытяжного парашюта, освобождают фиксирующую оболочку, выталкивают купол вытяжного парашюта с помощь пружины в направлении, противоположном движению беспилотного летательного аппарата, вытягивают купол основного парашюта, который после раскрытия тормозит продольное движение до нулевой скорости. По команде автопилота электроприводы редуктора замков-фиксаторов поворачиваются и освобождают консоли крыла, которые, складываясь, обеспечивают плавное перемещение купола основного парашюта в вертикальное положение. Посадка беспилотного летательного аппарата с консолями крыла, сложенными в вертикальной плоскости, позволяет избежать их повреждение при сложных условиях посадки и снизить вероятность зацепления строп подвесной системы и строп основного парашюта за хвостовое оперение при переходе основного парашюта из горизонтального положения в вертикальное положение. Однако крепление строп подвесной системы не к фюзеляжу, а к консолям крыла вызывает необходимость значительного повышения их прочности, что вместе с трехстепенными шарнирами и держателями существенно усложняет конструкцию беспилотного летательного аппарата, повышает его массу и стоимость, приводит к снижению скорости и дальности полета, а также ограничивает массу полезной нагрузки.
Известен способ парашютной посадки беспилотного самолета и парашютная система посадки беспилотного самолета по патенту на изобретение РФ RU 2592961, опубликованному 27.07.2016. Беспилотный самолет с парашютной системой посадки содержит парашют со стропами и подвесной системой, две консоли крыла, стыкуемые посредством фиксируемых шарнирных узлов с возможностью поворота относительно параллельной хорде крыла оси и шарнирного складывания консолей при их расфиксации. Шарнирные узлы стыковки консолей крыла с самолетом выполнены легкоразъемными при разрушении одноразовых элементов фиксации от тарированной нагрузки после поворота консолей в сторону нижней поверхности самолета, к которой прикреплена подвесная система парашюта, на которой установлен замок отсоединения от нее строп парашюта или их части. Консоли снабжены гибкими тягами. Гибкая тяга одной консоли крыла соединена с узлом запирания замка. Способ парашютной посадки беспилотного самолета характеризуется тем, что при раскрытии посадочного парашюта самолет переворачивают и производят снижение верхней поверхностью вниз, приземляют его на одну из законцовок консолей крыла и амортизируют энергию удара работой на разрушение элемента фиксации шарнирного узла консоли при ее рычажном повороте от ударной нагрузки на законцовку и отделяют консоль от самолета. Группа изобретений направлена на обеспечение надежной посадки при эксплуатации. Основным недостатком этого технического решения является необходимость проведения ремонта после каждой посадки для замены разрушенных одноразовых элементов фиксации и поврежденных законцовок консолей крыла от удара при приземлении на неровную каменистую поверхность. Это усложняет и удорожает эксплуатацию.
Известен малоразмерный беспилотный летательный аппарат с автоматически выпускаемым парашютом по патенту США на изобретение US 6685140, опубликованному 03.02.2004. Планер выполнен по классической самолетной схеме, содержащей фюзеляж, крыло, хвостовое оперение, двигатель внутреннего сгорания, установленный в передней части фюзеляжа и снабженный тянущим пропеллером. Парашютный отсек размещен в задней части фюзеляжа между крылом и хвостовым оперением. Он снабжен сложенным парашютом и устройством выброса парашюта. При достижении определенных условий полета: траектории, высоты и скорости, а также количества оборотов двигателя микропроцессор системы управления полетом выдает команду на выброс парашюта вверх и назад под острым углом к направлению полета. Основными недостатками технического решения является возможность аварийной ситуации из-за зацепа строп парашюта за хвостовое оперение и необходимость усиления прочности конструкции фюзеляжа не только в продольном, но и в поперечном направлении для противодействия ударным нагрузкам при выбросе парашюта под острым углом.
Известен беспилотный летательный аппарат с устройством выпуска парашюта по патенту США на изобретение US 8191831, опубликованному 05.06.2012. По совокупности общих существенных признаков техническое решение по указанному патенту выбрано в качестве прототипа.
Беспилотный летательный аппарат, выполненный по самолетной схеме, содержащий фюзеляж, крыло, прикрепленное к фюзеляжу и выполненное в виде левой консоли крыла и правой консоли крыла, снабженное управляющими поверхностями, симметрично расположенными на задней кромке консолей крыла, двигательную установку, включающую двигатель с пропеллером толкающего типа, прикрепленный к фюзеляжу в задней части беспилотного летательного аппарата, систему навигации, систему управления полетом, средства двусторонней радиосвязи с наземным пунктом управления, полезную нагрузку в виде электронно-оптической системы, установленную в передней части фюзеляжа беспилотного летательного аппарата, систему парашютной посадки, включающую парашютный отсек, установленный в фюзеляже, размещенный в парашютном отсеке парашют, створку парашютного отсека, механизм открытия створки парашютного отсека и выброса парашюта, гибкий фал парашюта, уложенный по поверхности задней части фюзеляжа, один конец которого прикреплен к стропам парашюта, а другой конец прикреплен к трем стропам привязной системы для крепления фала к верхней части фюзеляжа в области расположения центра тяжести беспилотного летательного аппарата, механизм отцепления парашюта после посадки, воздушный амортизатор, выполненный в виде надувного мешка, размещенного со стороны нижней части фюзеляжа.
Основным недостатком беспилотного летательного аппарата прототипа является низкая надежность из-за относительно высокой вероятности аварийной ситуации при неблагоприятных условиях из-за зацепа строп привязной системы и строп выброшенного вниз парашюта за хвостовое оперение и пропеллер двигателя, которые расположены в хвостовой части фюзеляжа за парашютным отсеком.
Сущность изобретения
Заявленный беспилотный летательный аппарат с парашютной системой посадки позволяет повысить надежность и безопасность парашютной посадки, увеличить продолжительность и дальность полета.
Указанный положительный эффект достигается за счет того, что беспилотный летательный аппарат выполнен по аэродинамической схеме бесхвостка, в котором крыло снабжено центропланом крыла и управляющими поверхностями, выполненными в виде элевонов, двигательная установка снабжена двумя двигателями с пропеллерами толкающего типа, первый двигатель размещен на левой задней части центроплана крыла, к которому прикреплена левая консоль крыла, второй двигатель размещен на правой задней части центроплана крыла, к которому прикреплена правая консоль крыла, отношение расстояния между продольными осями первого двигателя и второго двигателя к длине фюзеляжа беспилотного летательного аппарата выбрано в диапазоне от 0,4 до 0.5, отношение расстояния между продольными осями первого двигателя и второго двигателя к размаху крыла беспилотного летательного аппарата выбрано в диапазоне от 0,1 до 0.2, парашютный отсек расположен в задней части фюзеляжа, створка парашютного отсека выполнена в форме усеченной сферы, примыкающей к задней части фюзеляжа и образующей с ним единую плавную обтекаемую поверхность, в парашютном отсеке в центральной части передней торцевой перегородки установлено устройство перецепа гибкого фала парашюта, гибкий фал парашюта прикреплен к устройству перецепа гибкого фала парашюта и в исходном положении уложен вдоль верхней части передней торцевой перегородки, верхней внутренней поверхности парашютного отсека и вдоль верхней наружной задней части фюзеляжа до узла крепления к трем стропам подвесной системы для крепления фала к верхней части фюзеляжа в области расположения центра тяжести беспилотного летательного аппарата.
В беспилотном летательном аппарате двигательная установка снабжена двумя электрическими двигателями с пропеллерами толкающего типа со складывающимися лопастями.
В беспилотном летательном аппарате механизм открытия крышки парашютного отсека и выброса парашюта снабжен управляемым электрическим запором.
В беспилотном летательном аппарате механизм отцепления парашюта после посадки снабжен управляемым электрическим запором.
В беспилотном летательном аппарате передняя торцевая перегородка парашютного отсека выполнена в виде диафрагмы конической формы с вершиной, направленной к центру фюзеляжа.
В беспилотном летательном аппарате воздушный амортизатор в надутом состоянии выполнен в виде двух надувных мешков цилиндрической формы, первый надувной мешок размещен со стороны нижней части фюзеляжа под левой частью центроплана крыла, второй надувной мешок размещен со стороны нижней части фюзеляжа под правой частью центроплана крыла.
Краткое описание чертежей
В дальнейшем изобретение поясняется конкретными примерами его выполнения со ссылками на прилагаемые рисунок (Фигура 1), на котором представлен общий вид беспилотного летательного аппарата, рисунок (Фигура 2), на котором изображен вид сверху на беспилотный летательный аппарат, рисунок (Фигура 3), на котором размещено продольное сечение задней части беспилотного летательного аппарата с парашютным отсеком, и рисунок (Фигура 4), на котором показан беспилотный летательный аппарат в момент приземления при парашютной посадке.
Осуществление изобретения
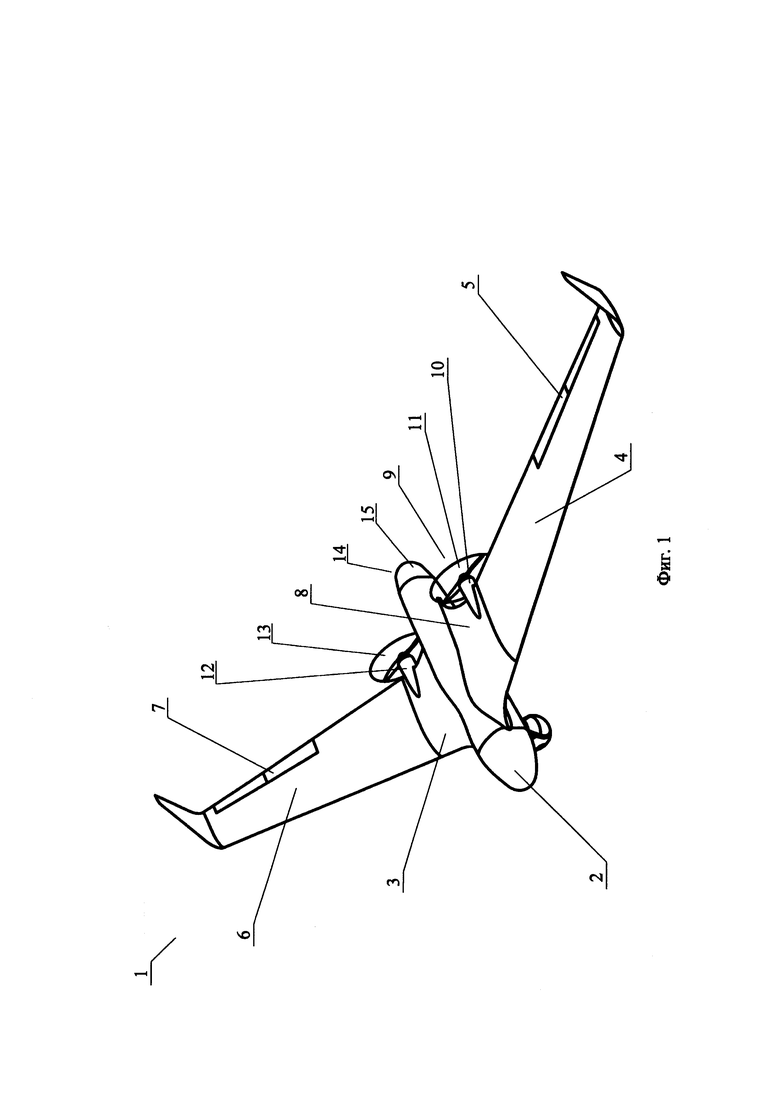
Беспилотный летательный аппарат 1 (Фигура 1), выполненный по аэродинамической самолетной схеме бесхвостка, содержит фюзеляж 2, крыло 3, прикрепленное к фюзеляжу 2, включающее левую консоль крыла 4, снабженную управляющими поверхностями, выполненными в виде элевонов 5, правую консоль крыла 6, снабженную управляющими поверхностями, выполненными в виде элевонов 7, и центроплан крыла 8. Двигательная установка 9 размещена в задней части беспилотного летательного аппарата 1 и снабжена двумя двигателями с пропеллерами толкающего типа. Первый двигатель 10 с пропеллером 11 размещен на левой задней части центроплана крыла 8, к которому прикреплена левая консоль крыла 4. Второй двигатель 12 с пропеллером 13 размещен на правой задней части центроплана крыла 8, к которому прикреплена правая консоль крыла 6. Парашютный отсек 14 расположен в задней части фюзеляжа 2. Створка парашютного отсека 15 выполнена в форме усеченной сферы, примыкающей к задней части фюзеляжа 2 и образующей с ним единую плавную обтекаемую поверхность. Полезная нагрузка 16, выполненная в виде электронно-оптической системы, установлена в передней части фюзеляжа 2 беспилотного летательного аппарата. Такая конструкция беспилотного летательного аппарата 1 с парашютным отсеком в задней части его фюзеляжа 2 обеспечивает при посадке надежный и безопасный выброс парашюта в направлении, противоположном направлению полета, раскрытие и наполнение парашюта, а также беспрепятственный перевод его из тормозящего горизонтального положения в вертикальное положение для плавного приземления.
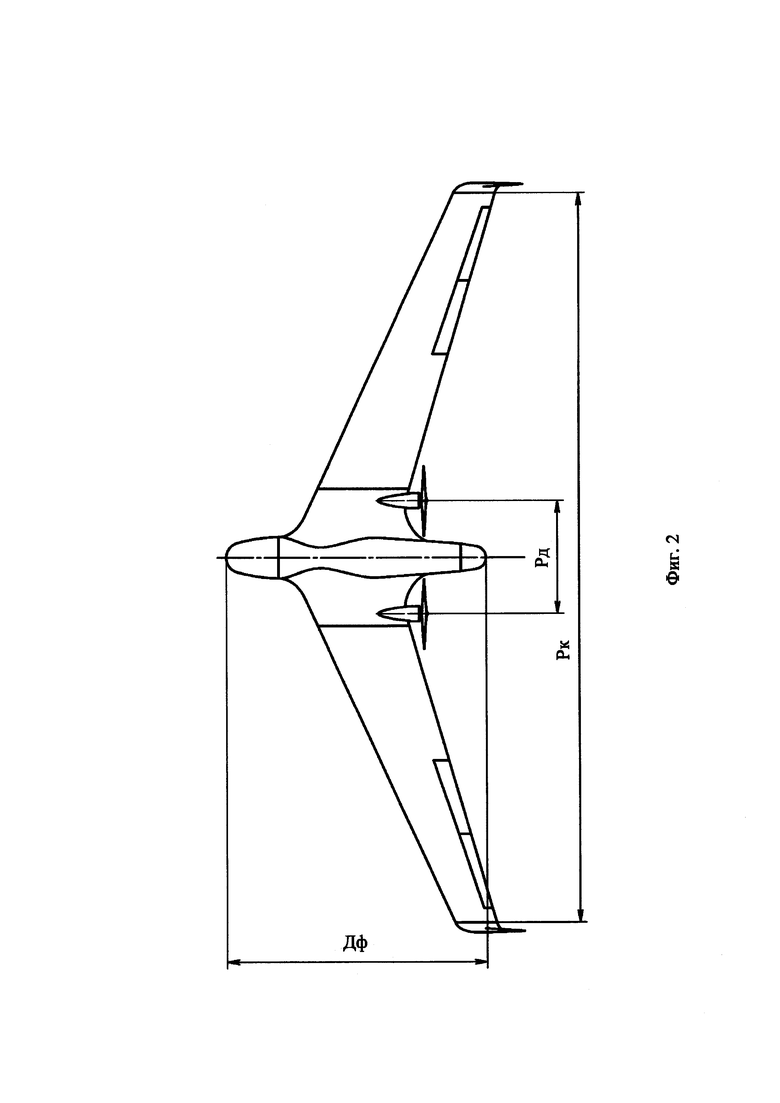
Для достижения высоких летных характеристик беспилотного летательного аппарата 1 (грузоподъемности, скорости, управляемости, высоты, дальности и продолжительности полета) при условии обеспечения необходимой прочности конструкции и ограниченных масса-габаритных характеристик, (Фигура 1 и Фигура 2), а также для оптимального размещения самолетных систем и самолетного оборудования беспилотного летательного аппарата и средств полезной нагрузки отношение расстояния между продольными осями первого двигателя 10 и второго двигателя 12 - Рд к длине фюзеляжа 2 - Дф беспилотного летательного аппарата 1 выбрано в диапазоне от 0,4 до 0.5, а отношение расстояния между продольными осями первого двигателя 10 и второго двигателя 12 - Рд к размаху крыла 3 - Рк беспилотного летательного аппарата 1 выбрано в диапазоне от 0,1 до 0.2.
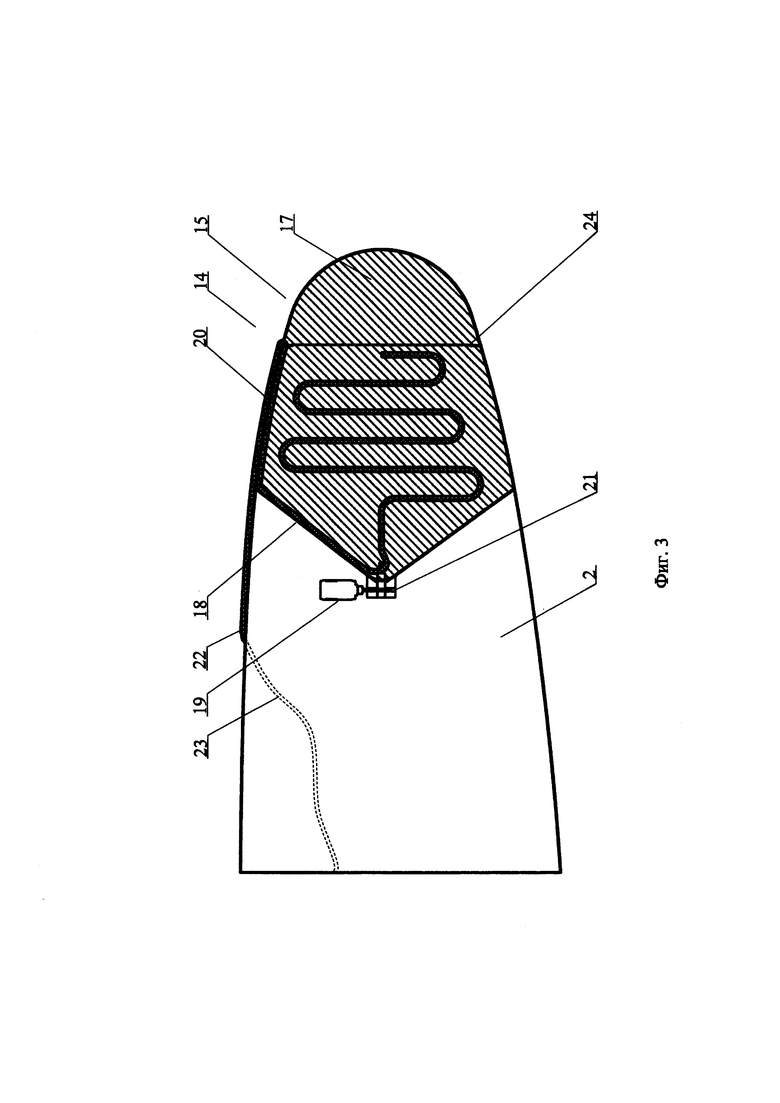
В парашютном отсеке 14 (Фигура 3), расположенном в задней части фюзеляжа 2 и прикрытом сзади створкой 15, размещены купол и стропы парашюта 17 в сложенном состоянии, а также установлена передняя торцевая перегородка 18, в центральной части которой смонтировано устройство перецепа 19 гибкого фала 20 парашюта 17, снабженное электромеханическим замком 21. В первоначальном положении гибкий фал 20 парашюта 17 прикреплен к устройству перецепа 19 гибкого фала парашюта и уложен вдоль верхней части передней торцевой перегородки 18, верхней внутренней поверхности парашютного отсека 14 и вдоль верхней наружной поверхности задней части фюзеляжа 2 до узла крепления 22 к трем стропам 23 подвесной системы для крепления гибкого фала к верхней части фюзеляжа 2 в области расположения центра тяжести беспилотного летательного аппарата, на равноудаленном расстоянии от него. При выпуске парашюта 17 отделяемая створка 15, прикрепленная стропой к сложенному парашюту 17, выполняет функцию вытяжного парашюта. После открытия электромеханического замка 24 она отделяется от фюзеляжа 2 принудительно с помощью трех пружин и вытягивает за собой парашют 17. Беспилотный летательный аппарат 1 продолжает горизонтальный полет с остановленными двигателями и сложенными лопастями пропеллеров. Парашют 17 под воздействием набегающего воздушного потока постепенно раскрывается и натягивает гибкий фал 20, прикрепленный к устройству перецепа 19 с электромеханическим замком 21. При полном открытии купола парашюта 17 максимальная перегрузка действует вдоль продольной оси и нормально воспринимается конструкцией беспилотного летательного аппарата 1. При снижении скорости беспилотного летательного аппарата траектория его полета плавно переходит из горизонтальной в наклонную баллистическую, а затем в вертикальную под влияние силы притяжения. Через определенное время снижения скорости полета происходит перецеп гибкого фала 20 парашюта 17 от электромеханического замка 21 к передней торцевой перегородке 18 внутри фюзеляжа к креплению на внешней поверхности фюзеляжа для придания беспилотному летательному аппарату горизонтального положения при приземлении.
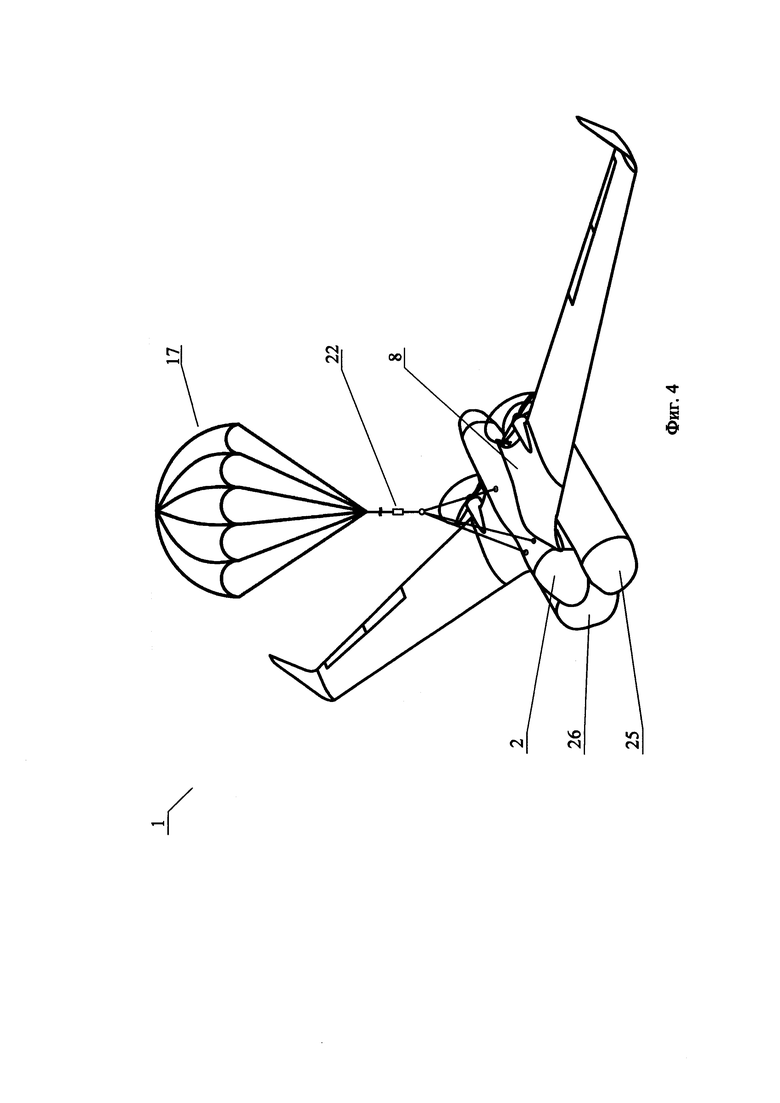
Для снижения ударных нагрузок, действующих на беспилотный летательный аппарат 1 и на средства его полезной нагрузки 16 при касании земной поверхности, установлен воздушный амортизатор, в надутом состоянии выполненный в виде двух надувных мешков цилиндрической формы (Фигура 4). Первый надувной мешок 25 в надутом состоянии размещен со стороны нижней части фюзеляжа 2 под левой частью центроплана крыла 8. Второй надувной мешок 26 в надутом состоянии размещен со стороны нижней части фюзеляжа 2 под правой частью центроплана крыла 8. Надувные мешки перед посадкой по команде системы автоматического управления или оператора наполняются воздухом из небольшого баллона, в котором он находится под давлением. При касании земной поверхности происходит плавное стравливание воздуха через специальные отверстия в надувных мешках. Это исключает удар беспилотного летательного аппарата о земную поверхность и отскок от нее. Таким образом осуществляется смягчение посадки и значительного снижения ударных нагрузок для сохранения конструкции беспилотного летательного аппарата и средств полезной нагрузки.
За счет модульного выполнения конструкции беспилотного летательного аппарата обеспечена возможность применения полезной нагрузки и силовой установки с различными массогабаритными характеристиками в рамках одной конструктивной основы.
Толкающие пропеллеры при работе не оказывает негативного влияния на работоспособность датчиков полезной нагрузки в передней полусфере.
Конструкция планера беспилотного летательного аппарата в основном выполнена из полимерных композитных материалов, позволяющих получать в процессе изготовления хорошо обтекаемые поверхности двойной кривизны. В одном из вариантов исполнения длина беспилотного летательного аппарата составляет 1.85 м, размах крыла - 5 м, а взлетная масса - 75 кг.
Конструкция беспилотного летательного аппарата обладает необходимой жесткостью и прочностью для осуществления катапультного запуска и парашютной посадки в процессе длительной безаварийной эксплуатации. Существенно снизить ударные нагрузки на сам беспилотный летательный аппарат и его полезную нагрузку позволяет применение надуваемой воздушной подушки в момент приземления.
Беспилотный летательный аппарат по сравнению с прототипом обладает высокой надежностью и безопасностью осуществления парашютной посадки при наличии высоких летных характеристик относительно продолжительности, дальности и управляемости полета. Для взлета и посадки ему не требуется аэродромная инфраструктура.
По своим летным и эксплуатационным характеристикам, а также по составу полезной нагрузки беспилотный летательный аппарат может быть эффективно использован в системе прицеливания оружия для поиска, обнаружения, сопровождения, определения координат и лазерной подсветки одиночных и групповых целей для осуществления стрельбы оружия, использующего как неуправляемые боеприпасы, так и управляемые боеприпасы с полуактивным лазерным наведением.
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2754277C1 |
| Беспилотный летательный аппарат | 1990 |
|
SU1804414A3 |
| МАЛОГАБАРИТНАЯ БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2009 |
|
RU2473455C2 |
| Мобильная беспилотная система для воздушного наблюдения и разведки | 2022 |
|
RU2793711C1 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ЭЛЕКТРОДВИЖИТЕЛЕМ И ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2014 |
|
RU2592963C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2010 |
|
RU2456211C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2008 |
|
RU2380286C1 |
| Способ парашютной посадки беспилотных самолетов и беспилотный самолет с системой парашютной посадки | 2023 |
|
RU2834660C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
| ТРАНСПОРТНЫЙ ГРУЗОВОЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2021 |
|
RU2776617C1 |
Изобретение относится к области беспилотных летательных аппаратов самолетного типа. Беспилотный летательный аппарат выполнен по аэродинамической самолетной схеме бесхвостка, снабжен двумя двигателями толкающего типа, парашютным отсеком, размещенным в хвостовой части фюзеляжа, и воздушным амортизатором в виде двух надувных мешков. В одном из примеров исполнения длина беспилотного летательного аппарата составляет 1.85 м, размах крыла - 5 м, а взлетная масса - 75 кг. Изобретение направлено на повышение надежности и безопасности парашютной посадки при наличии высоких летных характеристик. 7 з.п. ф-лы, 4 ил.
1. Беспилотный летательный аппарат, выполненный по самолетной схеме, содержащий
- фюзеляж,
- крыло, прикрепленное к фюзеляжу и выполненное в виде левой консоли крыла и правой консоли крыла, снабженное управляющими поверхностями, симметрично расположенными на задней кромке консолей крыла,
- двигательную установку, включающую двигатель с пропеллером толкающего типа, прикрепленный к фюзеляжу в задней части беспилотного летательного аппарата,
- систему навигации,
- систему управления полетом,
- средства двусторонней радиосвязи с наземным пунктом управления,
- полезную нагрузку в виде электронно-оптической системы, установленную в передней части фюзеляжа беспилотного летательного аппарата,
- систему парашютной посадки, включающую
-- парашютный отсек, установленный в фюзеляже,
-- размещенный в парашютном отсеке парашют,
-- створку парашютного отсека,
-- механизм открытия створки парашютного отсека и выброса парашюта,
-- гибкий фал парашюта, уложенный по поверхности задней части фюзеляжа, один конец которого прикреплен к стропам парашюта, а другой конец прикреплен к трем стропам крепления фала к верхней части фюзеляжа в области расположения центра тяжести беспилотного летательного аппарата,
-- механизм отцепления парашюта после посадки,
-- воздушный амортизатор, выполненный в виде надувного мешка, размещенного со стороны нижней части фюзеляжа,
отличающийся тем, что с целью повышения надежности парашютной посадки
- беспилотный летательный аппарат выполнен по аэродинамической схеме бесхвостка, в котором крыло снабжено центропланом крыла и управляющими поверхностями, выполненными в виде элевонов,
- двигательная установка снабжена двумя двигателями с пропеллерами толкающего типа,
- первый двигатель размещен на левой задней части центроплана крыла, к которому прикреплена левая консоль крыла,
- второй двигатель размещен на правой задней части центроплана крыла, к которому прикреплена правая консоль крыла,
- парашютный отсек расположен в задней части фюзеляжа,
- створка парашютного отсека выполнена в форме усеченной сферы, примыкающей к задней части фюзеляжа и образующей с ним единую плавную обтекаемую поверхность,
- в парашютном отсеке в центральной части передней торцевой перегородки установлено устройство перецепа гибкого фала парашюта,
- гибкий фал парашюта прикреплен к устройству перецепа гибкого фала парашюта и в исходном положении уложен вдоль верхней части передней торцевой перегородки, верхней внутренней поверхности парашютного отсека и вдоль верхней наружной задней части фюзеляжа до узла крепления к трем стропам подвесной системы для крепления фала к верхней части фюзеляжа в области расположения центра тяжести беспилотного летательного аппарата.
2. Беспилотный летательный аппарат по п. 1, в котором отношение расстояния между продольными осями первого двигателя и второго двигателя к длине фюзеляжа беспилотного летательного аппарата выбрано в диапазоне от 0,4 до 0.5.
3. Беспилотный летательный аппарат по п. 1, в котором отношение расстояния между продольными осями первого двигателя и второго двигателя к размаху крыла беспилотного летательного аппарата выбрано в диапазоне от 0,1 до 0.2.
4. Беспилотный летательный аппарат по п. 1, в котором двигательная установка снабжена двумя электрическими двигателями с пропеллерами толкающего типа со складывающимися лопастями.
5. Беспилотный летательный аппарат по п. 1, в котором механизм открытия крышки парашютного отсека и выброса парашюта снабжен управляемым электрическим запором.
6. Беспилотный летательный аппарат по п. 1, в котором механизм отцепления парашюта после посадки снабжен управляемым электрическим запором.
7. Беспилотный летательный аппарат по п. 1, в котором передняя торцевая перегородка парашютного отсека выполнена в виде диафрагмы конической формы с вершиной, направленной к центру фюзеляжа.
8. Беспилотный летательный аппарат по п. 1, в котором воздушный амортизатор в надутом состоянии выполнен в виде двух надувных мешков цилиндрической формы, первый надувной мешок размещен со стороны нижней части фюзеляжа под левой частью центроплана крыла, второй надувной мешок размещен со стороны нижней части фюзеляжа под правой частью центроплана крыла.
| US 8191831 B2, 05.06.2012 | |||
| УСТРОЙСТВО ДЛЯ СПАСЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2191140C1 |
| CN 110015430 A, 16.07.2019. | |||

