Настоящее изобретение относится к задаче обнаружения и определения местоположения движущихся или неподвижных объектов, являющихся источниками сигналов вибрации или звуковых сигналов, которые регистрируются с помощью распределенных оптоволоконных интерферометрических датчиков. В частности, распределенными оптоволоконными интерферометрическими датчиками могут быть датчики, использующие технологию распределенных датчиков вибраций (distributed vibration sensing, сокр. DVS), распределенных акустических датчиков (distributed vibration sensing, сокр. DAS), квази-распределенных интерферометрических датчиков на основе встроенных брэгговских решеток (fiber Bragg grating sensing, FBGS).
Технология распределенных оптоволоконных интерферометрических датчиков предполагает использование протяженной оптоволоконной трассы в качестве чувствительного элемента регистрируемых сигналов, различаемых по времени и пространству. Для опроса оптоволоконной трассы используются различные рефлектометрические техники, такие как оптическая рефлектометрия во временной области (optical time domain reflectometry, сокр. OTDR), оптическая рефлектометрия в частотной области (optical frequency domain reflectometry, сокр. OFDR), а также гибридные техники. Принцип работы распределенных оптоволоконных интерферометрических датчиков заключается в создании динамических интерферометров, позволяющих регистрировать сигналы продольных вибраций оптического волокна вдоль всей протяженной оптоволоконной трассы.
Как и во всех интерферометрических датчиках, в распределенных оптоволоконных интерферометрических датчиках регистрируется интенсивность сложения когерентных оптических волн, зависящая от разности оптических фаз этих волн. По крайней мере одна из этих волн распространяется в оптоволоконной трассе. Существуют различные аппаратные и алгоритмические техники, применяемые для в распределенных оптоволоконных интерферометрических датчиков, которые позволяют непосредственно извлекать информацию о разности фаз из сигнала интерференции. Разность фаз интерферирующих волн прямо пропорциональна разности хода в динамическом интерферометре; для распределенных оптоволоконных интерферометрических датчиков это эквивалентно тому, что разность фаз прямо пропорциональна локальным продольным деформациям оптоволокна, вызванным внешним воздействием, например, звуковыми сигналами, сейсмическими сигналами или сигналами вибраций, распространяющимися в среде, в которой находится оптоволоконная трасса.
Динамические интерферометры могут быть образованы с помощью искусственных или естественных частичных отражателей или рассеивателей света для создания обратной оптической волны, выходящей из оптоволоконной трассы. В частности, для этого может использоваться эффект обратного рэлеевского рассеяния света в оптическом волокне или слабоотражающие брэгговские решетки, либо другие искусственные неоднородности в оптическом волокне.
Распределенные оптоволоконные интерферометрические датчики широко применяются для обнаружения источников сигналов вибраций, сейсмических сигналов и звуковых сигналов в различных областях техники: охрана протяженных периметров, сейсморазведка, мониторинг транспортных систем (железные дороги, автомобильные дороги, трубопроводы). Во многих применениях требуется обнаруживать источники сигналов вибраций, звуковых или сейсмических сигналов, определять их координаты. Однако, сравнительно немного методов обнаружения источников и определения их точного местоположения было предложено для мониторинга движущихся объектов в реальном времени и с минимальной задержкой. Тем не менее, данное свойство может быть ценным для ряда областей, особенно для мониторинга автотранспорта в реальном времени. Интеллектуальная транспортная система, созданная на основе системы оптоволоконного мониторинга, обладающая данным свойством, может осуществлять сопровождение и контроль беспилотных и подключенных транспортных средств, с минимальной задержкой прогнозировать и обнаруживать опасные события и сценарии дорожной обстановки, извещая об этом участников дорожного движения в реальном времени.
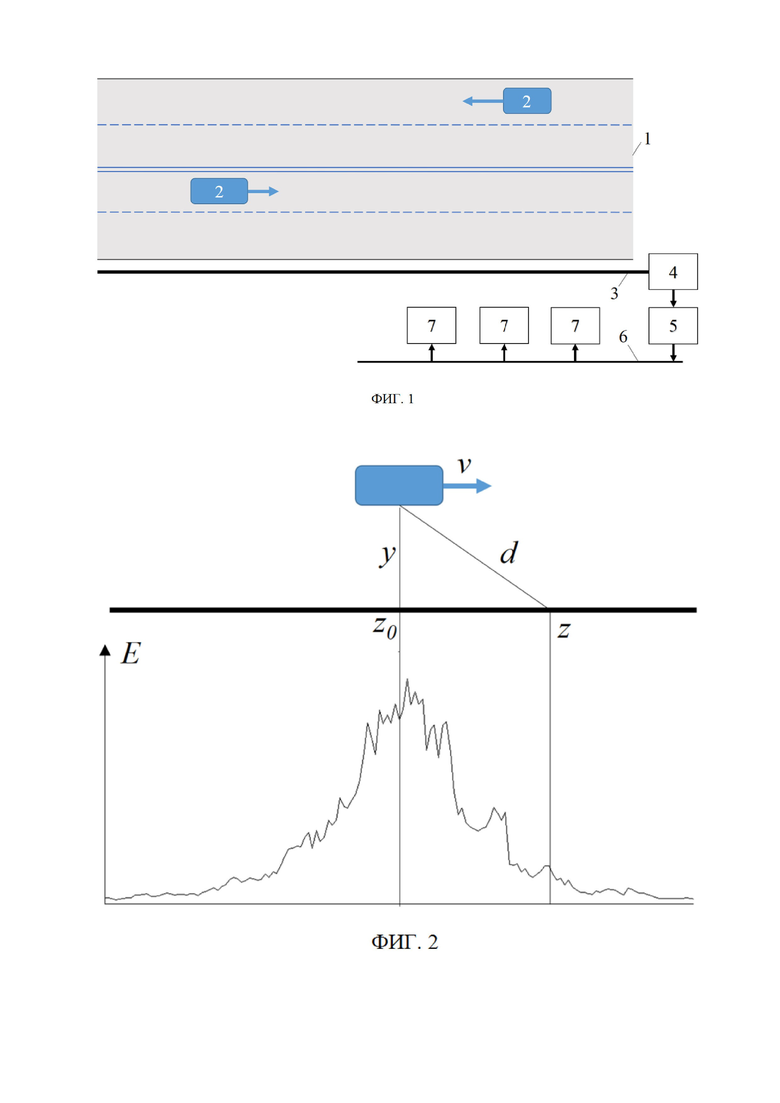
На фиг. 1 показана схема применения распределенного оптоволоконного интерферометрического датчика для задачи автодорожного мониторинга. На схеме упрощенно изображена проезжая часть с четырьмя полосами движения (по две в каждую сторону). Цифрами обозначено: 1 - автомобильная дорога, 2 - движущееся транспортное средство, 3 - оптоволоконная трасса, уложенная вдоль автодороги, 4 - оптоэлектронный блок опроса оптоволоконной трассы, 5 - вычислительный блок обработки данных, 6 - линия передачи данных, 7 - пользовательские станции. Оптоволоконный кабель, играющий роль линейной антенны для регистрируемых сигналов вибраций, уложен вдоль автодороги, обычно заглубляется в обочину или прокладывается в кабель-канале. В самом простом и распространенном случае оптоволоконная трасса параллельна краю дорожного полотна на всем протяжении оптоволоконной трассы. Оптоэлектронный блок, подключаемый к оптоволоконному кабелю, реализует выбранную оптическую схему реализации распределенного оптоволоконного датчика. Оптические сигналы оцифровываются и передаются в вычислительный блок, где проходят предварительную обработку, а затем высокоуровневую обработку. Высокоуровневое программное обеспечение реализует глубокую многоуровневую обработку в соответствии с предметной областью применения системы. В задаче автодорожного мониторинга метод обнаружения и определения координат транспортных средств входит в стек алгоритмов высокоуровневого программного обеспечения.
Ниже рассмотрены несколько методов определения местоположения источников сигналов с помощью распределенных оптоволоконных интерферометрических датчиков.
В патенте CN106448188 В, опубл. 16.11.2018, приоритет CN от 29.10.2016, раскрыт метод оценки средней скорости транспортного потока в двух направлениях при использовании данных комплекса автодорожного мониторинга на основе распределенного оптоволоконного интерферометрического датчика. Скорости и координаты транспортных средств определяются с помощью оптимизации параметров уравнения прямой к обнаруженным следам движения этих транспортных средств на пространственно-временной карте энергий сигналов. Метод имеет ограничения: задержка времени на несколько секунд для получения данных о линейном участке следа транспортного средства, поддержка только равномерно движущихся транспортных средств. Метод не предназначен для определения мгновенных координат источников сигналов.
Патент US20210312801A1, опубл. 07.10.2021, приоритет US от 07.04.2020, раскрывает еще один вариант системы мониторинга автотранспорта с использованием технологии распределенных оптоволоконных интерферометрических датчиков вибраций. Авторы патента предлагают применить специальную обработку двумерной пространственно-временной карты распределения энергий сигналов от движущихся транспортных средств для извлечения агрегированной информации о транспортных средствах. В частности, после предварительной обработки такой карты, предлагается применить пороговый алгоритм обнаружения прямых линий на карте для выделения из фона пространственно-временных следов равномерно движущихся транспортных средств, далее происходит оценка наклона этих следов с помощью набора двумерных сверточных фильтров для расчета средней скорости на отдельных пространственных участках. Информация о местоположении транспортного средства вдоль оптоволоконной трассы определяется по центру его следа. Очевидно, что обнаружение транспортного средства и информация о его координате вдоль трассы в данном методе определяется с задержкой в несколько секунд вследствие ограничения на минимально необходимую длину следа для его обнаружения на текущем временном сегменте пространственно-временной карты энергий. Ограничение на минимально допустимую длительность определяется пространственно-временными размерами двумерных сверточных фильтров, используемых для поиска следов движущихся источников. Такое ограничение может быть неприемлемым для сопровождения транспортных средств в реальном времени. Точно так же, как и в предыдущем случае, метод имеет ограничения на допустимое ускорение транспортных средств, т.к. их движение на текущем временном сегменте априорно предполагается равномерным.
Вышеупомянутые методы предполагают сбор только статистической информации о транспортном потоке. Точные пространственные координаты источников сигналов не определяются, информация о них не являются необходимой в рассматриваемом варианте задачи автодорожного мониторинга. Методы имеют ограничения на характер движения источников вибраций; они не способны обнаруживать резко ускоряющиеся или неподвижные источники. Также упомянутые методы работают с задержкой в несколько секунд, что неприемлемо для ряда применений, например, для слежения интеллектуальной транспортной системой за локальной транспортной обстановкой в реальном времени; данное свойство системы мониторинга необходимо для предоставления альтернативных источников данных подключенным или беспилотным транспортным средствам.
Близким к предлагаемому решению является описание патента US20220196462A1, опубл. 23.06.2022, приоритет US от 22.12.2020. В патенте раскрывается метод определения поперечной координаты уединенного точечного источника сигнала вибраций относительно направления оптоволоконной трассы для применения в условиях автодорожного мониторинга. Для этого используется эффект затухания энергии сигналов вибраций в грунте. Сигналы вибраций, связанные с движением транспортных средств, предварительно вычитаются с помощью специального фильтра. Метод предназначен для обнаружения угроз для кабеля, связанных с активностью в непосредственной близости от него, и не предполагает движения обнаруживаемых источников сигналов. В методе предлагается регистрировать пространственное распределение энергии сигнала вибраций вдоль оптоволоконной трассы в окрестности точки минимального расстояния между трассой и источником сигналов. Обработка распределения заключается в построении байесовской вероятностной модели в виде эмпирической совместной плотности вероятности энергии регистрируемого сигнала вибраций от расстояния до источника. Для решения данной задачи проводятся предварительные эксперименты на полигоне по сбору пространственных распределений энергий как функции от поперечной координаты источника сигнала при нескольких различных поперечных расстояний источника сигнала от трассы. Результаты полевых экспериментов интерполируются для получения непрерывной зависимости совместной плотности вероятности для поперечной координаты источника и соответствующему этой координате пространственному распределению энергии. После завершения процесса обучения алгоритм позволяет определять наиболее правдоподобную величину поперечной координаты источника сигнала вибраций по полученному пространственному распределению энергий. Достоинством метода является его способность определять поперечную координату источника с минимальной задержкой. Очевидным недостатком данного метода является требование обучения алгоритма всякий раз при изменении условий окружающей среды, в частности, при изменении функции диссипации энергии сигналов, что может случиться, например, при изменении метеорологических или сезонных условий, при изменении свойств грунта. Описанный процесс обучения алгоритма - весьма трудоемкий и экономически затратный процесс. Кроме того, метод не использует всю доступную априорную информацию, на что указывают сами авторы патента.
Также близким к предложенному решению является метод определения координат точечного источника звука или вибраций с помощью распределенного оптоволоконного датчика акустических колебаний или вибраций, изложенный в патенте СА3055030С, опубл. 12.04.2022, приоритет GB от 06.06.2011. Метод основан на измерении фазовой задержки регистрируемых в нескольких приемных каналах сигналов вибраций от одного и того же точечного источника, при этом взаимное геометрическое расположение приемных каналов должно быть известно, если оно отличается от прямолинейного. Достоинством метода является его способность определять координаты источника не только в двухмерном, но и трехмерном пространстве, причем с минимальной задержкой и высокой точностью. К недостаткам метода можно отнести высокую вычислительную сложность алгоритма, поскольку приходится принимать во внимание эффекты дисперсии и диссипации энергии звуковых волн в среде их распространения, для чего необходимо анализировать каждую спектральную компоненту сигнала по-отдельности и рассматривать множество комбинаций пар сигналов в каналах для вычисления набора расстояний с последующим объединением. Также недостатком является требование к тому, чтобы дисперсионная зависимость и диссипация энергии для различных частот была заранее известна, для чего необходимы либо априорные сведения о свойствах среды, либо проведение процесса обучения (подгонки параметров) алгоритма с помощью контролируемых полевых экспериментов.
Наиболее близким решением к предложенному решению является метод определения координат движущихся источников звуковых сигналов с помощью распределенных оптоволоконных интерферометрических датчиков, раскрытый в патенте WO 2012022934A2, опубл. 23.02.2012, приоритет GB от 16.08.2010, принятый за прототип. Метод имеет ограничение: он применим только для звуковых сигналов, спектр которых является узкополосным или линейчатым. Метод использует эффект допплеровского сдвига частоты основного тона сигнала. Для пространственной области уверенной регистрации целевого сигнала строится распределение смещения частоты основного тона от пространственной координаты. Анализ данного распределения позволяет восстановить информацию о мгновенных пространственных координатах источника сигнала на плоскости (вдоль оптоволоконной трассы и поперек). Метод подходит для определения мгновенных координат источников в пределах короткого временного интервала длительностью 1 секунда и менее. Достоинством метода является то, что он не зависит от эффектов диссипации энергии и дисперсии сигналов в среде. Недостатком прототипа является необходимость движения объекта с некоторой минимальной скоростью в связи с ограниченным спектральным разрешением регистрируемого сигнала; обычно эта минимальная скорость составляет более 10 м/с. Вторым недостатком является ограничение на тип спектра сигнала объектов, который должен быть узкополосным или линейчатым с выраженной частотой основного тона. Применительно к задаче автодорожного мониторинга данный метод имеет существенные ограничения, поскольку современные легковые автомобили, особенно электромобили, имеют, как правило, широкополосный спектр со слабо выраженными дискретными компонентами.
Краткое описание чертежей
Фиг. 1 - схема применения распределенных оптоволоконных интерферометрических датчиков для мониторинга движущихся по автомобильной дороге транспортных средств: состав системы мониторинга и метод укладки оптоволоконной трассы относительно дорожного полотна.
Фиг. 2 - пример мгновенного эмпирического распределения энергии регистрируемых сигналов вибраций движущегося транспортного средства с координатами (z0, у) вдоль оптоволоконной трассы. Линейный масштаб по оси энергий.
Фиг. 3 - семейство расчетных зависимостей мгновенного пространственного распределения энергии сигналов вибраций движущегося источника сигналов при изменении ширины зондирующего импульса света в оптическом волокне. При этом длительность кадра Δt=1 с, скорость ν=0 м/с, поперечная координата у=0 м, продольная координата z0=0 м. Логарифмический масштаб по оси энергий.
Фиг. 4 - семейство расчетных зависимостей мгновенного пространственного распределения энергии сигналов вибраций движущегося источника сигналов при изменении поперечной координаты источника. При этом ширина импульса света Δz=5 м, длительность кадра Δt=1 с, скорость v=0 м/с, продольная координата z0=0 м. Логарифмический масштаб по оси энергий.
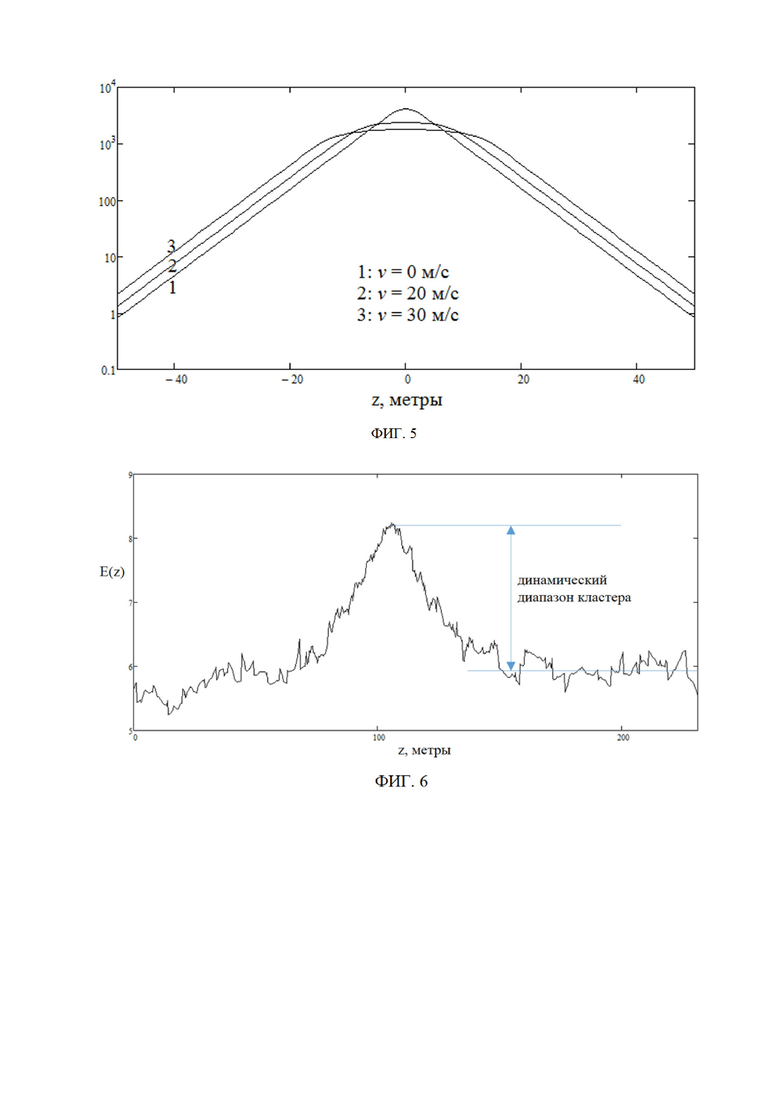
Фиг. 5 - семейство расчетных зависимостей мгновенного пространственного распределения энергии сигналов вибраций движущегося источника сигналов при изменении скорости v движения источника сигнала. При этом ширина импульса света Δz=5 м, длительность кадра Δt=1 с, поперечная координата у=0 м, продольная координата z0=0 м. Логарифмический масштаб по оси энергий.
Фиг. 6 - пояснение к введению величины динамического диапазона пространственного кластера энергии сигналов вибраций, относящегося к уединенному источнику сигналов. В логарифмическом масштабе для шкалы энергий величина равна разности максимальной величины распределения и уровня фонового шума.
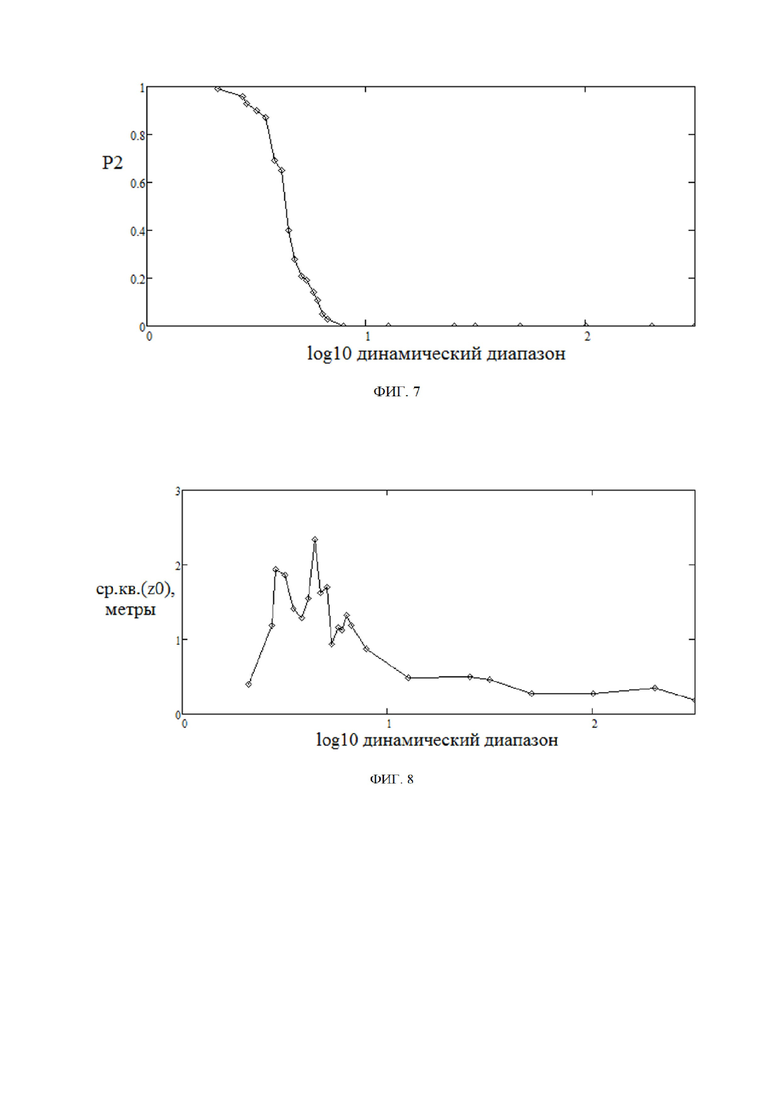
Фиг. 7 - зависимость вероятности пропуска от логарифма динамического диапазона для способа обнаружения источников сигналов вибраций, основанного на поиске экспоненциальных хвостов мгновенного распределения энергии сигналов вибраций.
Фиг. 8 - зависимость среднеквадратичного отклонения ошибки в оценке продольной координаты z0 от логарифма динамического диапазона для способа обнаружения источников сигналов вибраций, основанного на поиске экспоненциальных хвостов мгновенного распределения энергии сигналов вибраций.
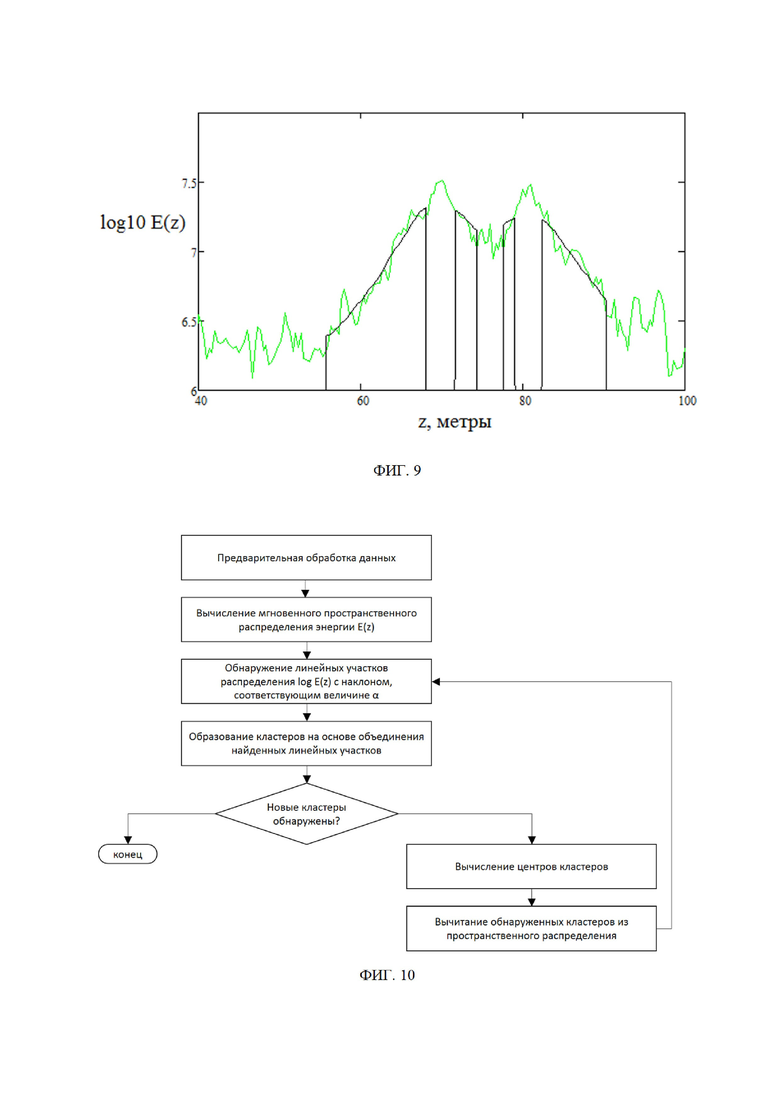
Фиг. 9 - пример обнаружения перекрывающихся в пространстве кластеров, соответствующих двум источникам сигналов вибраций по мгновенному эмпирическому распределению энергии вибраций. Показаны найденные пространственные диапазоны, соответствующие линейным участкам (для логарифмического масштаба по оси энергий).
Фиг. 10 - Схема предложенного способа обнаружения источников сигналов вибраций и оценки их параметров.
Предлагаемое решение раскрывает альтернативный раскрытому в прототипе способ определения точного местоположения объектов движущихся и неподвижных объектов и способ их обнаружения, если эти объекты являются источниками сигналов (звуковых, сейсмических, сигналов вибраций), регистрируемых распределенным оптоволоконным интерферометрическим датчиком, оптоволоконная трасса которого уложена вдоль направления движения объектов. В частном случае решение применимо для обнаружения и определения точного местоположения транспортных средств на автомобильной дороге, если оптоволоконная трасса уложена вдоль дороги. Решение свободно от вышеперечисленных ограничений других методов. В частности, оно предполагает минимальную временную задержку, не более 1 с, для задач обнаружения и определения местоположения объектов. При этом на качество определения местоположения не влияют вид спектра сигнала вибраций и ограничения на минимальную скорость источника сигнала, поскольку решение основано не на частотных, а на энергетических свойствах регистрируемых сигналов. Решение не требует априорного знания дисперсионной и диссипационной зависимостей среды распространения регистрируемых сигналов. Величина единственного используемого физического параметра - декремента затухания энергии сигнала в среде - определяется апостериорно в рамках предложенного метода. Ошибка определения продольной координаты вдоль оптоволоконной трассы обычно менее 1 м. Таким образом, техническим результатом решения является обнаружение источников сигналов вибраций или звуковых колебаний, в том числе движущихся источников, и определение их местоположения с точностью около 1 м в реальном времени и с временной задержкой не более 1 с без ограничений на характеристики спектра сигнала.
Для применения решения необходимо осуществить предобработку (т.е. подготовку) данных для получения очищенных сигналов продольных вибраций оптического волокна. Минимально необходимый набор операций стека алгоритмов предобработки данных включает следующие операции:
1. Формирование пространственных приемных каналов;
2. Разбиение данных на временные кадры;
3. Цифровая обработка фазы (зависит от выбранной оптической схемы);
4. Фильтрация сигналов вибраций в полосе регистрации.
Результатом предобработки в течение одного временного кадра является набор векторов сигналов для последующей высокоуровневой обработки, где количество векторов определяется количеством пространственных приемных каналов, а длина каждого вектора определяется длительностью временного кадра и частотой посылки зондирующих оптических импульсов. Расстояние между пространственными приемными каналами определяется скоростью работы подсистемы оцифровки сигналов. Длительность временного кадра, определяющего мгновенное окно наблюдения, выбирается в зависимости от свойств сигналов вибраций и источников этих сигналов для выбранной предметной области. Для каждого вектора сигналов, соответствующих одному из приемных каналов, реализуется одна из трех альтернатив:
1. Вектор не содержит сигнала вибраций от некоторого источника сигналов;
2. Вектор содержит сигнал вибраций от одного источника сигналов;
3. Вектор содержит сумму сигналов вибраций от нескольких источников сигналов.
Кроме того, каждый вектор данных содержит белый шум, энергия которого является случайной величиной.
Предлагаемое решение применяется к полученным в результате предобработки векторам сигналов. Оно основано на анализе дискретного пространственного распределения энергии регистрируемых сигналов вибраций и состоит из следующих последовательно применяемых стадий обработки:
1. Вычисление пространственного распределения энергии векторов сигналов;
2. Обнаружение уединенных или слабо перекрывающихся кластеров пространственного распределения энергии;
3. Подгонка параметров для каждого найденного кластера, определение мгновенных координат центра кластера и энергии соответствующего источника сигнала.
Вычисляемое на первой стадии одномерное пространственное распределение энергии векторов сигналов представлено в дискретном виде, т.е. представляет собой набор энергий суммы сигналов вибраций и шума в каждом приемном канале на длительности текущего кадра времени. Простейшим способом оценки энергии векторов является вычисление эмпирической дисперсии для каждого вектора сигналов в наборе. При этом рекомендуется оценивать энергию шума в каждом векторе и вычитать ее из общей энергии вектора сигналов. Анализ пространственного распределения энергий сигналов основан на свойствах затухания энергии колебаний.
Известно, что энергия сигнала вибраций экспоненциально затухает в однородной среде, которой является, например, грунт или воздушная среда. Скорость экспоненциального затухания описывается скалярной величиной, декрементом α, величина которого определяется свойствами среды распространения сигнала. В связи с этим, пространственное распределение энергии сигналов от уединенного источника сигналов представляет собой распределение, близкое по форме к симметричному экспоненциальному распределению, которое далее будем называть кластером. Кластер описывается четырьмя скалярными параметрами: координатой центра, амплитудой, минимальным расстоянием между источником сигналов и оптоволоконной трассой, а также упомянутой ранее величиной декремента затухания. Положение центра кластера (z0) вдоль трассы соответствует одномерной координате точки минимального расстояния между оптоволоконной трассой и источником сигналов, как показано на фиг. 2. Минимальное расстояние (у) между источником сигналов и оптоволоконной трассой определяется в направлении, поперечном по отношению к направлению трассы. Пример пространственного распределения энергии регистрируемых сигналов E(z) вдоль оптоволоконной трассы показано на том же рисунке. Обозначим энергию источника сигналов в точке с координатами (z0, у) как Е0. Энергия регистрируемых вдоль трассы сигналов E(z) меньше, чем Е0 вследствие затухания энергии с увеличением расстояния до источника; она максимальна в центре кластера z0.
Обозначим расстояние d от источника сигналов с координатами (z0, у) до некоторого приемного канала с координатами (z, 0):
На достаточно большом удалении от центра кластера вклад поперечной координаты у источника сигнала в функцию d(z) становится пренебрежимо малым, и «хвосты» пространственного распределения энергии E(z) становятся экспоненциальными. Вблизи от источника сигналов вклад у является существенным, поэтому распределение энергии приобретает сглаженный вид.
Также на вид распределения E(z) оказывают влияние следующие параметры: скорость движения источника сигнала ν, длительность временного кадра, на котором оценивается энергия Δt, и ширина зондирующих световых импульсов Δz (для схемы опроса типа «рефлектометрия во временной области», в общем случае Δz - это удвоенный радиус пространственной корреляции, т.е. параметр, учитывающий разрешающую способность оптоволоконного датчика по пространству). Конечная величина пространственной разрешающей способности распределенного оптоволоконного датчика приводит к сглаживанию фактического распределения энергии сигнала с некоторым ядром, форма которого зависит от пространственной автокорреляционной функции системы.
Учет всех параметров, включая энергию источника сигнала Е0, позволяет выразить E(z) в виде двойного интеграла по длительности кадра и ширине пространственного канала:

В случае z>>у, что верно для хвостов кластера, распределение E(z) прямо пропорционально величинам Е0 и Δt. В логарифмическом масштабе распределение E(z) имеет наклон, пропорциональный α/2.
На фиг. 3-5 приведены примеры расчета распределения E(z) при некоторых комбинациях параметров. Во всех случаях источник сигнала имеет координату z0=0 м, энергия источника Е0=1000, декремент затухания энергии сигнала α=0.175 м-1. На графиках масштаб по оси энергий логарифмический. На фиг. 3 приведено семейство зависимостей E(z) при изменении ширины импульсов Δz, при этом длительность кадра Δt=1 с, скорость ν=0 м/с, поперечная координата y=0 м. На фиг. 4 приведено семейство зависимостей E(z) при изменении поперечной координаты у до источника сигнала, при этом ширина импульса света Δz=5 м, длительность кадра Δt=1 с, скорость ν=0 м/с. На фиг. 5 приведено семейство зависимостей E(z) при изменении скорости ν движения источника сигнала, при этом ширина импульса света Δz=5 м, длительность кадра Δt=1 с, поперечная координата у=0 м.
Предлагаемое решение позволяет осуществить обнаружение уединенного источника сигнала и точно определить продольную координату z по форме мгновенного пространственного распределения энергии E(z). Решение также применимо для перекрывающихся кластеров энергии от нескольких источников, если степень перекрытия менее 30%. В основе решения используется линейный вид зависимости хвостов распределения энергии при рассмотрении этого распределения в логарифмическом масштабе. Наклон этой линейной зависимости позволяет непосредственно определить декремент затухания энергии из измеренного мгновенного распределения энергии. Центр кластера, его пространственная координата z0, определяется по месту пересечения двух прямых, соответствующих хвостам распределения. Обнаружение источника сигнала производится выделением соответствующего кластера из измеренного распределения энергии E(z), причем для этого используется линейность хвостов кластера и известный декремент затухания.
Пороговый алгоритм обнаружения кластеров, основанный на поиске линейных участков с известным наклоном, был испытан на виртуальном стенде, при этом оценки параметров случайных распределений были взяты из эмпирических распределений в реальных ситуациях (движение транспортных средств). Порог алгоритма обнаружения имеет смысл отклонения участка эмпирического распределения E(z) от прямой линии с известным наклоном. Характеристики алгоритма были определены по отношению к динамическому диапазону кластера - это отношение максимальной энергии кластера, соответствующей координате его центра z0, к энергии фоновых шумов. На фиг. 6 показано, как определяется динамический диапазон кластера, шкала энергий логарифмическая. На фиг. 7 показана зависимость эмпирической вероятности пропуска алгоритма обнаружения от динамического диапазона в логарифмическом масштабе. Вероятность пропуска (ошибка второго рода) Р2 равна 0 при динамическом диапазоне более 10 дБ. Эмпирическая вероятность ложного срабатывания равна 0 во всем исследуемом диапазоне.
Поскольку координата центра кластера z0 в предложенном решении определяется по набору точек, соответствующих линейным участкам логарифмического распределения, точность оценки z0 высока и превышает пространственную разрешающую способность оптоволоконного датчика. За счет такого «субпиксельного» разрешения возможно определять координату z0 с ошибкой менее 1 м при достаточно большом динамическом диапазоне регистрируемых энергий. На фиг. 8 показана эмпирически найденная зависимость среднеквадратичной ошибки определения центра кластера z0 в метрах в зависимости от динамического диапазона кластера в логарифмическом масштабе. Ширина оптического импульса Δz здесь равна 5 м. Видно, что при динамическом диапазоне более 10 дБ ошибка определения координаты z0 существенно меньше 1 м.
Предложенный алгоритм обнаружения кластеров энергий способен различить кластеры с небольшой степенью перекрытия, не превышающей 30% площади в линейном масштабе энергий. На фиг. 9 показан пример двух перекрывающихся кластеров и найденные алгоритмом линейные участки эмпирического распределения E(z).
После обнаружения кластеров в пространственном распределении энергии E(z) рекомендуется проверить наличие остаточных кластеров, которые могли быть закрыты большими кластерами. Для этого распределение найденных на данном шаге кластеров вычитается из E(z), после чего осуществляется повторный поиск кластеров для разностного распределения.
На фиг. 10 показана схема обработки сигналов для одной из реализаций предлагаемого решения по обнаружению источников сигналов и их местоположения. После обнаружения всех кластеров и оценки их параметров рекомендуется внести поправку в величину декремента затухания на основе апостериорной информации об этой величине, полученной непосредственно из параметров кластеров.
Реализации алгоритма обнаружения и определения местоположения источников сигналов могут отличаться от предложенной. Они могут быть основаны, например, на подгонке параметров кластеров к эмпирическому распределению, методах кластеризации типа expectation-maximization, адаптированных для кластеров рассмотренного вида, на альтернативных пороговых методах. Общим для таких алгоритмов является использование информации об ожидаемой форме кластеров энергии, имеющих симметричные экспоненциальные хвосты, и обработка мгновенного пространственного распределения энергии.
Необходимо отметить, что качество алгоритма обнаружения кластеров с экспоненциальными хвостами и метода определения координат центра кластера в общем случае зависит от качества входных данных, предоставляемых аппаратной частью распределенного оптоволоконного интерферометрического датчика. На качество данных существенно влияет выбранная оптическая схема, метод фазовой демодуляции, подсистема оцифровки, а также алгоритмы цифровой обработки сигналов. Основными параметрами, влияющими на качество входных данных, являются нелинейные искажения, динамический диапазон, пространственное разрешение и скорость дискретизации. Для применения предлагаемого решения рекомендуется, чтобы оборудование системы мониторинга, реализующее распределенный оптоволоконный интерферометрический датчик вибраций, обладало высокой линейностью передаточной характеристики для регистрируемых сигналов вибраций (коэффициент нелинейных искажений не более -10 дБ), высоким пространственным разрешением (длительность зондирующего оптического импульса не более 100 мкс), высокой скоростью работы подсистемы оцифровки (не менее 4 отсчетов на длительность зондирующего импульса), большим динамическим диапазоном (не менее 40 дБ). Для изложенного метода не подходят оптические схемы с прямым детектированием интерферометрического сигнала в связи с недостаточным динамическим диапазоном и высоким уровнем нелинейных искажений. Применимы только схемы приема с демодуляцией оптической фазы аналоговыми или цифровыми методами.
Изложенный способ обнаружения транспортных средств и определения их координат не зависит от спектра сигналов транспортных средств и является быстрым, т.к. работает с одномерным распределением энергий. Метод пригоден работы в реальном времени с минимальной задержкой, поскольку для сбора входных данных достаточно короткого интервала времени длительностью не более 1 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ИСТОЧНИКА ЗВУКА | 2012 |
|
RU2593620C2 |
| Способ дифференциальной оценки стадий поврежденности изделия, выполненного из композитного материала | 2023 |
|
RU2816129C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2698106C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ Ж/Д | 2017 |
|
RU2676176C1 |
| Способ акустического обнаружения и локализации свищей в магистральных газовых трубопроводах и контроля состояния изоляторов и разъединителей воздушной линии катодной защиты трубопроводов и система для его осуществления | 2017 |
|
RU2639927C1 |
| СПОСОБ СЕЙСМИЧЕСКОГО МОНИТОРИНГА ПРИ ПОМОЩИ КОМБИНИРОВАННОЙ СИСТЕМЫ НАБЛЮДЕНИЙ | 2024 |
|
RU2839553C1 |
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ ДЛИННОМЕРНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2670570C1 |
| Способ и устройство для автономного дистанционного определения концентрации атмосферных газовых составляющих | 2020 |
|
RU2736178C1 |
| УСТРОЙСТВО ОБРАБОТКИ ВИДЕОИНФОРМАЦИИ СИСТЕМЫ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2484531C2 |
| ОПТОВОЛОКОННЫЙ АКУСТИКО-ЭМИССИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАСТИЧЕСКИХ ДЕФОРМАЦИЙ БОЛЬШИХ ИНЖЕНЕРНЫХ СООРУЖЕНИЙ | 2016 |
|
RU2650799C2 |

Изобретение относится к методу обнаружения объектов и определения их местоположения с помощью распределённого оптоволоконного интерферометрического датчика вибраций, чувствительным элементом которого является протяжённый оптоволоконный кабель, уложенный вдоль траектории движения объектов. Техническим результатом предлагаемого решения является автоматическое обнаружение и определение точного местоположения объектов, движущихся вдоль оптоволоконной трассы, в реальном времени и с временной задержкой не более 1 с. Результат достигается тем, что после регистрации и извлечения сигналов вибраций вычисляют пространственное распределение энергии регистрируемых сигналов вибраций, затем обнаружение объектов осуществляют по характерной форме экспоненциальных хвостов распределений соответствующих им пространственных кластеров энергии вибраций, а определение продольной пространственной координаты объектов относительно оптоволоконной трассы осуществляют на основании расчёта величин параметров пространственного распределения соответствующих этим объектам кластеров энергий вибраций. 4 з.п. ф-лы, 10 ил.
1. Метод обнаружения объектов и определения их местоположения в реальном времени, включающий:
- применение распределённых оптоволоконных интерферометрических датчиков вибраций, использующих рассеиватели света или частичные отражатели в оптическом волокне;
- укладку оптоволоконного кабеля, являющегося чувствительным элементом распределённого оптоволоконного интерферометрического датчика, вдоль направления движения объектов;
- регистрацию сигнала оптической интерференции и извлечение информации о разности интерферирующих оптических волн как функции расстояния от источника света;
- извлечение сигналов вибраций, создаваемых движущимися объектами, в каждом пространственном измерительном пространственном канале как функций времени;
и отличающийся тем, что:
- вычисляют пространственное распределение энергии регистрируемых сигналов вибраций;
- обнаружение объектов осуществляют по характерной форме экспоненциальных хвостов распределений соответствующих им пространственных кластеров энергии вибраций;
- определение продольной пространственной координаты объектов относительно оптоволоконной трассы осуществляют на основании расчёта величин параметров пространственного распределения соответствующих этим объектам кластеров энергий вибраций.
2. Метод обнаружения объектов и определения их местоположения по п. 1, отличающийся тем, что мгновенное пространственное распределение энергии сигналов вибраций объектов осуществляют на коротком текущем временном интервале длительностью не более 1 секунды.
3. Метод обнаружения объектов и определения их местоположения по п. 1, отличающийся тем, что среди вычисляемых величин параметров вычисляют координаты вдоль оптоволоконной трассы соответствующих объектам центров кластеров.
4. Метод обнаружения объектов и определения их местоположения по п. 1, отличающийся тем, что для обнаружения транспортных средств применяют оптимизационный или пороговый алгоритм, основанный на обнаружении экспоненциальных хвостов распределения соответствующих кластеров энергии при известной оценке декремента затухания сигналов вибраций.
5. Метод обнаружения объектов и определения их местоположения по п. 1, отличающийся тем, что после определения параметров кластеров энергии, соответствующих этим объектам, проводят апостериорное уточнение величины декремента затухания энергии сигналов вибраций.
| СИСТЕМА И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2569051C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ ПОДВОДНЫХ И НАДВОДНЫХ ОБЪЕКТОВ | 2017 |
|
RU2670176C1 |
| KR 1020060029043 A, 04.04.2006 | |||
| WO 2012022934 A2, 23.02.2012. | |||
