Изобретение относится к области гидроакустики и предназначено для определения параметров объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования.
Задача одновременного секторного обзора пространства всегда ставилась разработчиками аппаратуры гидроакустического шумопеленгования [1]. При этом важно не только обнаруживать шумящие объекты и оценивать направление на них, но и определять другие параметры одновременно для всех наблюдаемых объектов, которые характеризовали бы их положение в пространстве. Наиболее ценным является разделение совокупности наблюдаемых шумящих объектов по расстоянию до них.
Известны способы обнаружения шумящих в море объектов [2, 3], в которых осуществляется одновременный секторный обзор шумового пространства в горизонтальной плоскости. Способы позволяют уверенно обнаруживать шумящие объекты и определять направление на них, но не позволяют определять другие координатные параметры.
Известны способы определения расстояния до шумящих объектов [4, 5], в которых используется явление частотного затухания сигнала при его распространении в среде. Способы не позволяют одновременно оценивать расстояние до всех наблюдаемых объектов.
Наиболее близким аналогом по решаемым задачам и используемым физическим закономерностям к предлагаемому изобретению является способ получения информации о шумящем в море объекте с помощью цветового кодирования [6], который принят за прототип.
В способе-прототипе выполняются следующие операции: прием гидроакустического шумового сигнала многоэлементной антенной,
формирование совокупности пространственных каналов в секторе обзора (горизонтального веера характеристик направленности),
частотно-временная обработка сигнала в каждом пространственном канале с формированием трех частотных диапазонов и определением отношения сигнал/помеха в каждом из сформированных частотных диапазонов,
кодировка интенсивностей цветовых компонент каждого из трех частотных диапазонов R (red), G (green), В (blue) в соответствии со значениями отношений сигнал/помеха в каждом из частотных диапазонов,
формирование цвета каждого пространственного канала путем смешения интенсивности цветовых компонент,
индикация полученной цветовой информации в каждом пространственном канале в зависимости от времени с образованием цветовых трасс,
прогнозный расчет акустического поля по расстоянию для заданных частотных диапазонов,
формирование на индикаторе эталонных цветовых шкал по расстоянию для объектов двух альтернативных классов путем решения уравнения гидроакустики для двух уровней шумоизлучения объектов и кодирования результатов цветом по правилу, общему с кодированием принятого сигнала,
определение расстояния до шумящего объекта и класса шумности объекта оператором на основании сравнения цвета трассы принятого сигнала с цветом эталонных цветовых шкал для двух классов.
Рассмотрим недостатки способа-прототипа.
В способе-прототипе используют систему из трех частотных фильтров, настроенных на прием сигнала с условно принятых близкого, среднего и дальнего расстояний таким образом, что каждый фильтр имеет параметры, обеспечивающие максимальное превышение сигнала над помехой для объекта строго на определенном расстоянии [7]. Для любого объекта на выходе системы будем иметь три значения отношения сигнал/помеха, которые будут определенным образом соотнесены между собой в зависимости от текущего расстояния до объекта. Далее в способе-прототипе производится кодировка значений отношения сигнал/помеха в каждом из трех частотных диапазонов интенсивностью своей цветовой компоненты R (red), G (green), В (blue), а на экране индикатора производится смешение цветовых компонент в единой точке пространственного канала.
В описании способа-прототипа заявлено, что результирующий цвет пространственного канала при соединении цветовых компонент будет определяться соотношением между отношениями сигнал/помеха в частотных диапазонах. Это действительно должно позволить оператору определить расстояние до шумящего объекта путем визуального анализа цвета трассы сигнала. В грубом приближении должно происходить изменение цвета трассы объекта, движущегося на удаление, от красного к желтому, зеленому, голубому и синему цветам, и в другой последовательности при сближении.
На самом деле, при реализации способа-прототипа для «сильных» сигналов результирующий цвет трассы оказывается отличным от ожидаемого. Это связано с тем, что в способе-прототипе нарушается соотношение между отношениями сигнал/помеха в частотных диапазонах, когда на индикаторе секторного обзора с ограниченным динамическим диапазоном необходимо одновременно наблюдать объекты с различным уровнем шумоизлучения. При этом интенсивность каждой цветовой компоненты (R, G, В) кодируется значением отношения сигнал/помеха в соответствующем частотном диапазоне независимо от других частотных диапазонов. Тогда, в случае, когда значение отношения сигнал/помеха в каком-либо частотном диапазоне превышает динамический диапазон интенсивности цветовой компоненты, для нее возникает «эффект переусиления», при котором принятый сигнал кодируется максимальным уровнем интенсивности своей цветовой компоненты. Это приводит к тому, что результирующий цвет при соединении компонент в цветное представление при индикации не будет соответствовать исходному соотношению между отношениями сигнал/помеха в частотных диапазонах. Наблюдателем при анализе цвета трассы сигнала будет допущена ошибка в определении расстояния до шумящего объекта. В крайне неблагоприятном случае, когда все три значения отношения сигнал/помеха превысят динамический диапазон интенсивности цветовых компонент, принятый сигнал во всех трех частотных диапазонах будет закодирован максимальным уровнем интенсивности своих цветовых компонент. При соединении компонент в цветное представление будет получен белый цвет трассы, полностью исключающий возможность определения расстояния.
На практике такая ситуация возникает довольно часто. Это связано с сильным отличием (более 10 раз) значений динамического диапазона интенсивности цветовых компонент и динамического диапазона сигналов, принимаемых при шумопеленговании.
Для устранения этого недостатка в способ-прототип введены прогнозный расчет акустического поля и индикация эталонных цветовых шкал для объектов двух классов, отличающихся уровнем шумности сигнала в точке излучения. Однако это может позволить верно оценить расстояние только в том случае, когда выполняются два условия. Во-первых, шумность сигнала в точке излучения задана верно, то есть угадана. Во-вторых, все объекты разного уровня шума наблюдаются одновременно на предельных расстояниях, близких для пороговой чувствительности шумопеленгатора. В других случаях ошибка не только не устраняется, но усугубляется в связи с доверием оператора к заведомо ложным результатам.
Таким образом, способ-прототип, корректно обрабатывая «слабые» сигналы, не может безошибочно обрабатывать «сильные» сигналы шумовых объектов.
Задачей заявляемого способа является получение возможности цветового разделения по расстоянию всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, вне зависимости от динамического диапазона их сигналов.
Для решения поставленной задачи в способ цветового кодирования информации гидроакустического шумопеленгования, включающий прием гидроакустического шумового сигнала многоэлементной антенной, формирование совокупности пространственных каналов в секторе обзора в горизонтальной плоскости, частотно-временную обработку сигнала в каждом пространственном канале с формированием не менее двух частотных диапазонов и определением отношения сигнал/помеха в каждом из частотных диапазонов, формирование цвета каждого пространственного канала из цветовых компонент, назначенных для информации каждого частотного диапазона, индикацию цвета в зависимости от времени с образованием трасс объектов, определение расстояния до всех наблюдаемых объектов с использованием информации о цвете трасс,
введены новые признаки, а именно:
для формирования цвета каждого пространственного канала находят в каждом пространственном канале максимальное значение отношения сигнал/помеха,
определяют коэффициент значимости каждого частотного диапазона в каждом пространственном канале как соотношение между отношением сигнал/помеха в рассматриваемом частотном диапазоне и максимальным значением отношения сигнал/помеха в своем пространственном канале,
задают интенсивность цветовой компоненты каждого частотного диапазона в соответствии со значением его коэффициента значимости,
смешивают цветовые компоненты частотных диапазонов в каждом пространственном канале,
определяют коэффициент усиления каждого пространственного канала как равный максимальному значению отношения сигнал/помеха в этом пространственном канале в случаях, когда максимальное значение отношения сигнал/помеха не превышает максимального значения динамического диапазона интенсивности цветовых компонент, и равный максимальному значению динамического диапазона интенсивности цветовых компонент в других случаях,
формируют цвет каждого пространственного канала путем умножения смеси цветовых компонент на коэффициент усиления,
а определение расстояния до всех наблюдаемых объектов производят по цвету их трасс, полученных с учетом коэффициентов значимости частотных диапазонов.
Техническим результатом изобретения является возможность разделения по расстоянию всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, при любом динамическом диапазоне сигналов шумопеленгования. При этом достигается уменьшение общего количества и сложности арифметических операций.
Покажем возможность достижения указанного технического результата предложенным способом.
Основное различие между способом-прототипом и предлагаемым способом видно из следующих аналитических записей алгоритмов смешения цветовых компонент:
Алгоритм способа-прототипа:
Z1=B(Q1)+G(Q2)+R(Q3),
где Q1, Q2, Q3 - отношения сигнал/помеха в трех частотных диапазонах, B, G, R - интенсивность цветовых компонент, Z1 - результирующий цвет.
Алгоритм заявляемого способа (для случая трех частотных диапазонов):
Z2=k(Qmax)·[B(Q1/Qmax)+G(Q2/2max)+R(Q3/Qmax)],
где Qmax - максимальное значение отношения сигнал/помеха в пространственном канале, Z2 - результирующий цвет, k - коэффициент усиления пространственного канала, определяемый согласно правилу:
где Jmax - максимальное значение динамического диапазона интенсивности цветовых компонент.
Видно, что заявляемый способ, в отличие от способа-прототипа, содержит более сложный алгоритм смешения цветовых компонент. Сначала определяют коэффициенты значимости каждого частотного диапазона как соотношение между отношением сигнал/помеха в частотном диапазоне и максимальным значением отношения сигнал/помеха. Понятно, что полученные коэффициенты значимости не могут принимать значения больше единицы. Следовательно, даже для «сильных» сигналов не будет наблюдаться «эффект переусиления», и кодировка интенсивностей цветовых компонент будет произведена безошибочно, в соответствии с соотношением между отношениями сигнал/помеха в частотных диапазонах. Это позволяет при дальнейшем формировании результирующего цвета получать цветовую кодировку «сильных» сигналов такой, что она соответствует исходному соотношению между отношениями сигнал/помеха для объекта на текущем расстоянии. Только после этого осуществляется смешение цветовых компонент.
Далее производится формирование результирующего цвета. При этом алгоритм автоматически разделяет «слабые» и «сильные» сигналы с помощью переменного коэффициента усиления. Для «слабых» сигналов, для которых максимальное значение отношения сигнал/помеха не превышает максимального значения динамического диапазона интенсивности цветовых компонент, результирующий цвет формируется на уровне максимального значения отношения сигнал/помеха. Для «сильных» сигналов, для которых максимальное значение отношения сигнал/помеха превышает максимальное значение динамического диапазона интенсивности цветовых компонент, результирующий цвет формируется на уровне максимального значения динамического диапазона интенсивности цветовых компонент. Это позволяет способу корректно обрабатывать как «сильные», так и «слабые» сигналы шумопеленгования, одновременно наблюдаемые в секторном обзоре.
Таким образом, заявляемый способ, оперирующий в каждом пространственном канале одновременно двумя параметрами (абсолютным значением максимального отношения сигнал/помеха и относительными значениями коэффициентов значимости частотных диапазонов), позволяет получать истинную цветовую кодировку для разделения по расстоянию всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, при любом динамическом диапазоне сигналов шумопеленгования.
Заявляемый способ позволяет определять расстояние до всех наблюдаемых объектов без сложных арифметических операций расчета акустического поля и формирования эталонных цветовых шкал, выполняемых в динамике работы способа. Цветовая палитра по расстоянию может быть сформирована при проектировании способа на основании анализа частотных диапазонов и выбранных для них цветовых компонент. Наиболее удачным представляется выбор трех смежных частотных диапазонов. Это позволит, с одной стороны, разделить полный диапазон широкополосного шумопеленгования на полосы октавной ширины, для которых обеспечивается хорошая помехоустойчивость. С другой стороны - использовать стандартные цветовые компоненты B, G, R, применяемые в индикаторах с электронно-лучевыми трубками. В этом случае цветовая палитра трассы объекта любого уровня шумности будет состоять в плавном переходе цвета от красного к желтому, зеленому, голубому и синему при изменении расстояния от минимального до максимального по всей шкале шумопеленгатора.
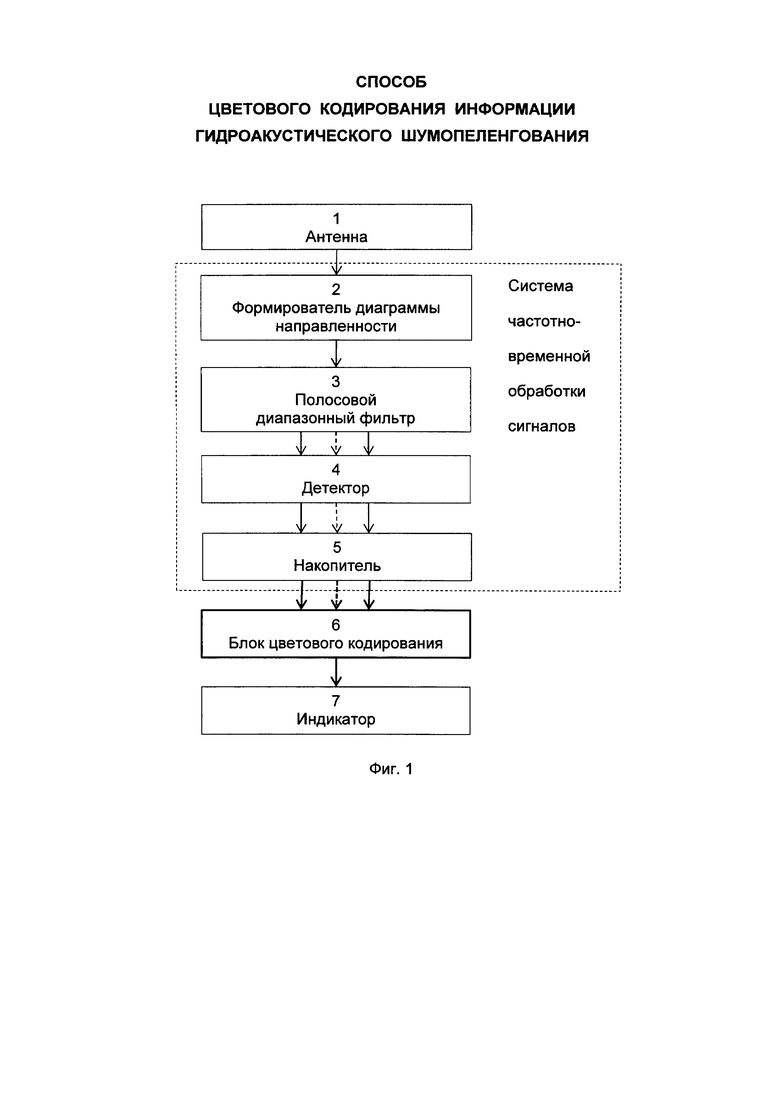
Сущность изобретения поясняется фиг. 1, на которой изображена блок-схема устройства, реализующего предлагаемый способ разделения по расстоянию совокупности наблюдаемых шумящих объектов.
Предлагаемый способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1, на основе обобщенной структурной схемы типовой гидроакустической системы шумопеленгования [1]. Структурная схема включает последовательно соединенные блоки: антенна 1, блок 2 формирования диаграммы направленности, трехполосовой диапазонный фильтр 3, детектор 4, накопитель 5, блок 6 цветового кодирования, индикатор 7.
С помощью аппаратуры (фиг. 1) заявленный способ реализуется следующим образом: шумовой сигнал объекта, принятый антенной 1, поступает в систему частотно-временной обработки, содержащую формирователь диаграммы направленности 2, полосовой диапазонный фильтр, формирующий как минимум два частотных диапазона, детектор 4 и накопитель 5, производящий определение отношения сигнал/помеха в каждом частотном диапазоне. Далее отношения сигнал/помеха в сформированных частотных диапазонах поступают в блок 6 для цветового кодирования информации. Из блока 6 в индикатор 7 поступает значение результирующего цвета.
В блоке 6 осуществляется формирование цвета с учетом как соотношения между отношениями сигнал/помеха в частотных диапазонах, так и максимального значения отношения сигнал/помеха. Принципиальным моментом является то, что в блок цветового кодирования поступают несколько (не менее двух) независимых значений отношения сигнал/помеха в частотных диапазонах, а из блока цветового кодирования в индикатор поступает уже одно значение результирующего цвета. Это обеспечивает корректировку «эффекта переусиления», и, как следствие, истинную кодировку трассы цели в зависимости от расстояния при любом соотношении между динамическим диапазоном интенсивности цветовых компонент и динамическим диапазоном сигналов объектов в тракте шумопеленгования.
Процедуры, реализуемые в блоках 2-6, выполняются параллельно для всех пространственных каналов сектора обзора. В индикаторе 7 осуществляется отображение цвета совокупности пространственных каналов в зависимости от времени с образованием трасс объектов. Это позволяет оператору определять расстояние до всех одновременно наблюдаемых объектов.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ цветового кодирования информации гидроакустического шумопеленгования, который может быть использован для судовых гидроакустических средств подводного наблюдения с целью разделения по расстоянию совокупности одновременно наблюдаемых в секторном обзоре шумящих объектов вне зависимости от динамического диапазона их сигналов.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука, 2004.
2. Антипов В.А., Величкин С.М., Обчинец О.Г., Пастор А.Ю., Подгайский Ю.П., Янпольская А.А. Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S 3/80.
3. Антипов В.А., Величкин С.М., Подгайский Ю.П. Патент РФ №2339050. Способ обнаружения шумящих в море объектов. МПК G01S 3/80, G01S 15/04.
4. Демиденко В.А. Частотный метод оценки расстояния и его эффективность при работе ГАС в пассивном режиме // Гидроакустика. 1993. Вып. 1. С. 3-16.
5. Голубев А.Г., Мисюченко И.Л. Патент РФ №2128848 от 10.04.1999. Способ измерения дальности до источника шумоизлучения. МПК G01S.
6. Величкин С.М., Миронов Д.Д., Антипов В.А., Зеленкова И.Д., Перельмутер Ю.С Патент РФ №2156984 от 27.09.2000. Способ получения информации о шумящем в море объекте и способ получения цветовых шкал для него. МПК G01S 3/84.
7. Волкова А.А., Консон А.Д. Потенциальные возможности двухчастотного метода оценки расстояния // Гидроакустика. 2009. Вып. 9. С. 43-51.
8. Смарышев М.Д. Направленность гидроакустических антенн. Л.: Судостроение. 1973.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| Способ панорамного обнаружения шумящих в море объектов | 2020 |
|
RU2754200C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2736188C1 |
| Способ классификации морских объектов по уровню шума в источнике | 2021 |
|
RU2767001C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2007 |
|
RU2353946C1 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ классификации морских объектов на основе весовых коэффициентов их классификационных признаков | 2018 |
|
RU2687994C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
Изобретение относится к области гидроакустики и предназначено для определения расстояния до всех объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования, путем анализа цвета их трасс. Производят прием гидроакустического шумового сигнала многоэлементной антенной, формируют совокупность пространственных каналов в секторе обзора (горизонтального веера характеристик направленности) и осуществляют частотно-временную обработку сигнала в каждом пространственном канале независимо с формированием не менее двух частотных диапазонов и определением отношения сигнал/помеха в каждом из сформированных частотных диапазонов. Для разделения совокупности наблюдаемых объектов по расстоянию определяют в каждом пространственном канале максимальное значение отношения сигнал/помеха и коэффициенты значимости частотных диапазонов как соотношение между отношением сигнал/помеха в рассматриваемом частотном диапазоне и максимальным значением отношения сигнал/помеха. Задают интенсивность цветовой компоненты каждого частотного диапазона в соответствии со значением его коэффициента значимости, смешивают цветовые компоненты частотных диапазонов в каждом пространственном канале. Определяют переменный коэффициент усиления каждого пространственного канала на основе анализа максимального значения отношения сигнал/помеха, формируют цвет каждого пространственного канала путем умножения смеси цветовых компонент на коэффициент усиления. Индицируют полученную цветовую информацию в каждом пространственном канале в зависимости от времени с образованием цветовых трасс объектов во всем секторе обзора. Определяют расстояние до всех наблюдаемых объектов по цвету их трасс. Техническим результатом изобретения является возможность разделения по расстоянию всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, при любом динамическом диапазоне сигналов шумопеленгования. 1 ил.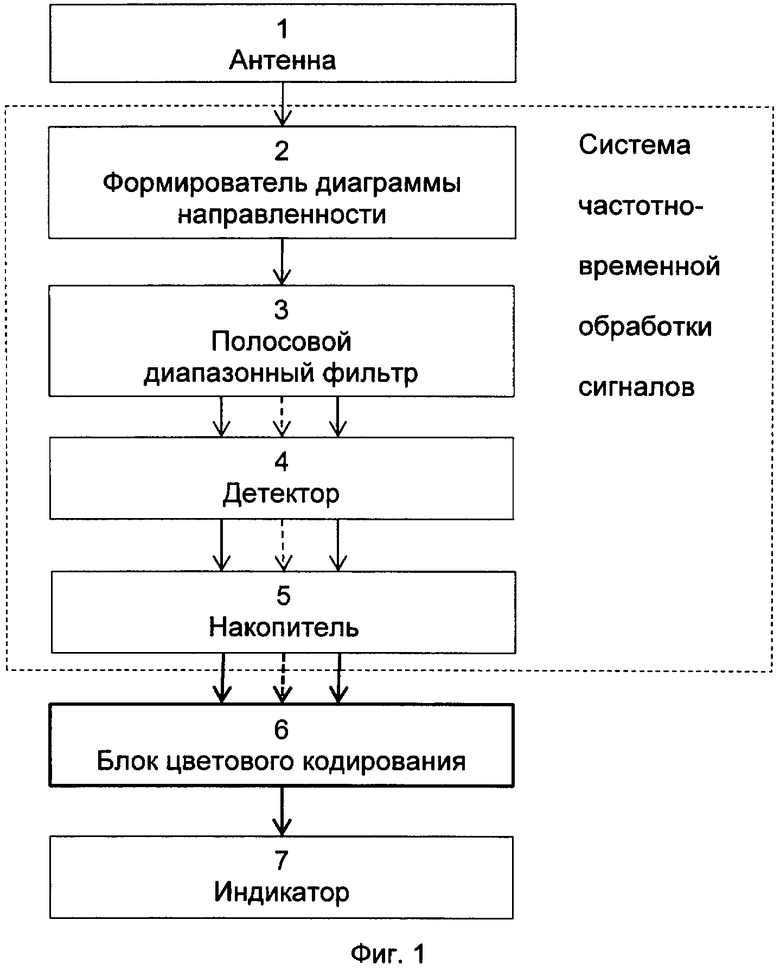
Способ цветового кодирования информации гидроакустического шумопеленгования, включающий прием гидроакустического шумового сигнала многоэлементной антенной, формирование совокупности пространственных каналов в секторе обзора в горизонтальной плоскости, частотно-временную обработку сигнала в каждом пространственном канале с формированием не менее двух частотных диапазонов и определением отношения сигнал/помеха в каждом из частотных диапазонов, формирование цвета каждого пространственного канала из цветовых компонент, назначенных для информации каждого частотного диапазона, индикацию цвета в зависимости от времени с образованием трасс объектов, определение расстояния до всех наблюдаемых объектов с использованием информации о цвете трасс, отличающийся тем, что для формирования цвета каждого пространственного канала находят в каждом пространственном канале максимальное значение отношения сигнал/помеха, определяют коэффициент значимости каждого частотного диапазона в каждом пространственном канале как соотношение между отношением сигнал/помеха в рассматриваемом частотном диапазоне и максимальным значением отношения сигнал/помеха в своем пространственном канале, задают интенсивность цветовой компоненты каждого частотного диапазона в соответствии со значением его коэффициента значимости, смешивают цветовые компоненты частотных диапазонов в каждом пространственном канале, определяют коэффициент усиления каждого пространственного канала как равный максимальному значению отношения сигнал/помеха в этом пространственном канале в случаях, когда максимальное значение отношения сигнал/помеха не превышает максимального значения динамического диапазона интенсивности цветовых компонент, и равный максимальному значению динамического диапазона интенсивности цветовых компонент в других случаях, формируют цвет каждого пространственного канала путем умножения смеси цветовых компонент на коэффициент усиления, а определение расстояния до всех наблюдаемых объектов производят по цвету их трасс, полученных с учетом коэффициентов значимости частотных диапазонов.
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩЕМ В МОРЕ ОБЪЕКТЕ И СПОСОБ ПОЛУЧЕНИЯ ЦВЕТОВЫХ ШКАЛ ДЛЯ НЕГО | 1999 |
|
RU2156984C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ УЗКОПОЛОСНЫХ ШУМОВЫХ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ НА ОСНОВЕ ВЫЧИСЛЕНИЯ ИНТЕГРАЛЬНОГО ВЕЙВЛЕТ-СПЕКТРА | 2007 |
|
RU2367970C2 |
| СПОСОБ СОВМЕСТНОЙ ОЦЕНКИ ДИСТАНЦИИ ДО ШУМЯЩЕГО В МОРЕ ОБЪЕКТА И ЕГО ШУМНОСТИ | 2014 |
|
RU2548400C1 |
| ОДНОКООРДИНАТНОЕ ГИДРАВЛИЧЕСКОЕ КОПИРОВАЛЬНОЕУСТРОЙСТВО | 0 |
|
SU213520A1 |

