Изобретение относится к области гидроакустики и предназначено для обнаружения объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования.
Задача панорамного обзора пространства в горизонтальной плоскости всегда ставилась разработчиками аппаратуры гидроакустического шумопеленгования [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука, 2004].
Известны способы обнаружения шумящих в море объектов [Антипов В.А., Величкин С.М., Обчинец О.Г., Пастор А.Ю., Подгайский Ю.П., Янпольская А.А. Патент РФ №2353946 от 27.04.2009. Способ получения информации о шумящих в море объектах. МПК G01S 3/80, Антипов В.А., Величкин С.М., Подгайский Ю.П. Патент РФ №2339050 от 20.11.2008. Способ обнаружения шумящих в море объектов. МПК G01S 3/80, G01S 15/04], в которых осуществляется одновременный секторный (панорамный) обзор шумового пространства в горизонтальной плоскости статическим веером характеристик направленности (ХН), где реализуется совокупность отдельных каналов частотно-временной обработки сигнала на выходе каждого лепестка ХН. Способы позволяют обнаруживать шумящие объекты и определять направление на них. Однако, в случае, если перемещение сигнала между лепестками характеристик направленности в горизонтальной плоскости происходит быстрее, чем выбранный интервал времени накопления, обнаружение объекта может быть затруднено.
Наиболее близким аналогом по решаемым задачам и выполняемым процедурам к предлагаемому изобретению является способ обнаружения шумящих в море объектов [Антипов В.А., Величкин С.М., Подгайский Ю.П., Янпольская А.А. Патент РФ №2300118 от 27.05.2007. Способ обнаружения шумящих в море объектов. МПК G01S 3/80], который принят за прототип.
В способе-прототипе выполняются следующие операции:
принимают гидроакустический шумовой сигнал многоэлементной антенной с развитой апертурой в горизонтальной плоскости,
формируют совокупность пространственных каналов в секторе обзора (горизонтальный веер характеристик направленности), в каждом из которых одновременно осуществляют частотно-временную обработку сигнала, для чего последовательно осуществляют квадратичное детектирование, частотную фильтрацию и накопление процесса во времени,
центрируют и нормируют сигналы к помехе по совокупности результата обработки в пространственных каналах с измерением совокупности отношений сигнал/помеха,
принимают первичное решение об обнаружении сигнала в тех пространственных каналах, в которых измеренное отношение сигнал/помеха превышает первичный порог,
осуществляют трассовое сопровождение объекта по углу при переходе обнаруженного сигнала между пространственными каналами,
осуществляют дополнительное накопление энергии сигнала в процессе сопровождения,
отбраковывают ложно обнаруженные сигналы и принимают окончательное решение об обнаружении объекта.
Недостаток способа-прототипа заключается в использовании при частотно-временной обработке одного фиксированного времени накопления. Чаще всего, при реализации способа используют малое время накопления. Это связано с тем, что в секторе обзора могут существовать объекты, которые обладают большой угловой скоростью. Обычно, это близкие объекты большой шумности. Такие объекты быстро перемещаются в горизонтальной плоскости, постоянно переходя по вееру характеристик направленности из одного лепестка в другой лепесток, задерживаясь в пределах одного пространственного канала непродолжительное время. Поэтому, при частотно-временной обработке, для возможности обнаружения таких объектов, выбирают малое время накопления, согласованное с интервалом времени нахождения объекта в одном пространственном канале.
Однако, в секторе обзора одновременно могут существовать и другие объекты, которые обладают малой угловой скоростью. Обычно, это дальние объекты малой шумности. Такие объекты медленно перемещаются в горизонтальной плоскости, находясь в одном пространственном канале длительное время. Малое время накопления, когда оно выбрано при реализации способа-прототипа, не позволяет достаточно накопить сигнал объекта малой шумности. Это приводит к тому, что некоторые объекты не могут быть обнаружены. Для возможности обнаружения таких объектов в способе прототипе выбирают малый первичный порог обнаружения, а затем осуществляют дополнительное накопление энергии сигнала в процессе сопровождения. Это приводит, с одной стороны, к первичному ложному обнаружению несуществующих объектов, а с другой стороны, к увеличению времени обработки.
С другой стороны, если при реализации способа-прототипа выбрать большое время накопления, то может быть затруднено обнаружение объектов, которые обладают большой угловой скоростью. Такие объекты, задерживаются в пределах одного пространственного канала непродолжительное время, в результате чего в пространственном канале с большим временем накопления начинает накапливаться не сигнал, а помеха. Это также приводит к тому, что некоторые объекты не могут быть обнаружены.
Задачей заявляемого способа является увеличение возможности обнаружения всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, вне зависимости от их угловой скорости.
Для решения поставленной задачи в способ панорамного обнаружения шумящих в море объектов, в котором принимают гидроакустический шумовой процесс многоэлементной антенной с развитой апертурой в горизонтальной плоскости, формируют совокупность пространственных каналов в секторе обзора (горизонтальный веер характеристик направленности), в каждом из которых одновременно осуществляют частотно-временную обработку шумового процесса, для чего последовательно осуществляют квадратичное детектирование, частотную фильтрацию и накопление процесса, центрируют и нормируют к помехе результаты частотно-временной обработки процесса в совокупности пространственных каналов с измерением совокупности отношений сигнал/помеха, принимают решение об обнаружении объекта по превышению измеренного отношения сигнал/помеха порогового значения,
введены новые признаки, а именно:
задают совокупность времен накопления τi=ϕ/Vi, где ϕ=const - угловое расстояние между осями соседних лепестков характеристик направленности, Vi - совокупность тангенциальных скоростей объекта, i - порядковый номер от 1 до n,
в каждом пространственном канале одновременно осуществляют n частотно-временных обработок процесса с временами накопления τi, соответственно,
отдельно центрируют и нормируют к помехе результаты каждой из частотно-временных обработок процесса по совокупности пространственных каналов с измерением отдельных совокупностей отношений сигнал/помеха Ri, соответственно,
решение об обнаружении объекта принимают для тех пространственных каналов, в которых хотя бы одно отношение сигнал/помеха из совокупностей Ri, превышает пороговое значение,
считают, что обнаружен объект с тангенциальной скоростью Vi, если отношение сигнал/помеха из совокупности Ri максимально.
Техническим результатом изобретения является увеличение отношения сигнал/помеха для всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, вне зависимости от скорости их углового перемещения, что увеличивает помехоустойчивость при обнаружении. А также дополнительно обеспечивается возможность разделения обнаруженных объектов по их тангенциальной скорости.
Покажем возможность достижения указанного технического результата предложенным способом.
Известно [Зарайский В.А., Тюрин A.M. Теория гидролокации. Л.: Военно-морская академия. 1975], что способность канала частотно-временной обработки обнаружить слабый сигнал увеличивается при увеличении времени накопления. Это связано с тем, что отношение сигнал/помеха Q на выходе канала увеличивается пропорционально времени накопления:

где q - отношение сигнал/помеха на входе канала обработки, Δf - общая ширина частотной полосы, τ - время накопления.
При этом необходимо, чтобы сигнал объекта присутствовал на входе канала втечение всего времени накопления.
Системы со статическим веером характеристик направленности в качестве отдельных входов каналов частотно-временной обработки имеют совокупность отдельных направлений в горизонтальной плоскости. А шумовой объект, являясь подвижным, перемещается в горизонтальной плоскости между разными входами частотно-временной обработки. Время t, втечение которого подвижный объект находится на входе одного фиксированного пространственного канала (входа одной частотно-временной обработки) зависит от угловой (тангенциальной) скорости объекта V и углового расстояния между осями соседних лепестков характеристик направленности ϕ:
t=ϕ/V
Выбор времени накопления в канале частотно-временной обработки, близкий к времени нахождения объекта на входе канала, позволит наиболее эффективно использовать способность канала обнаружить слабый сигнал.
В связи с тем, что тангенциальная скорость объектов, одновременно наблюдаемых в секторном обзоре, может быть разной, целесообразно использовать одновременно несколько каналов обработки с разными временами накопления, каждый из которых будет наиболее эффективен для своего диапазона угловых скоростей объектов. Например, для совокупности диапазонов скоростей [0,V1], [V1,V2], … [Vn-1>Vn] получаем совокупность диапазонов времени, втечение которого такие объекты находятся на входе одного фиксированного пространственного канала [∞,t1], [t1,t2], … [tn-1>tn], где t1=ϕ/Vi, ϕ=const. Тогда, для обеспечения наибольшего значения отношения сигнал/помеха для каждого диапазона скоростей, согласно (1) наиболее эффективно использовать совокупность времен накопления τ1=∞, τ2=t1, … τn=tn-1, для каждого из которых осуществлять свою частотно-временную обработку. В этом случае, в каждом канале частотно-временной обработки будет использовано наибольшее время накопления, возможное для оптимального обнаружения объекта с конкретной угловой скоростью и будет получено максимальное значения отношения сигнал/помеха для такого объекта. Здесь в качестве значения τi необходимо выбирать время, максимально возможное из практических соображений. Это позволит, во-первых, увеличить возможность обнаружения всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, вне зависимости от их угловой скорости, и во-вторых, разделить обнаруженные объекты по их угловой (тангенциальной) скорости.
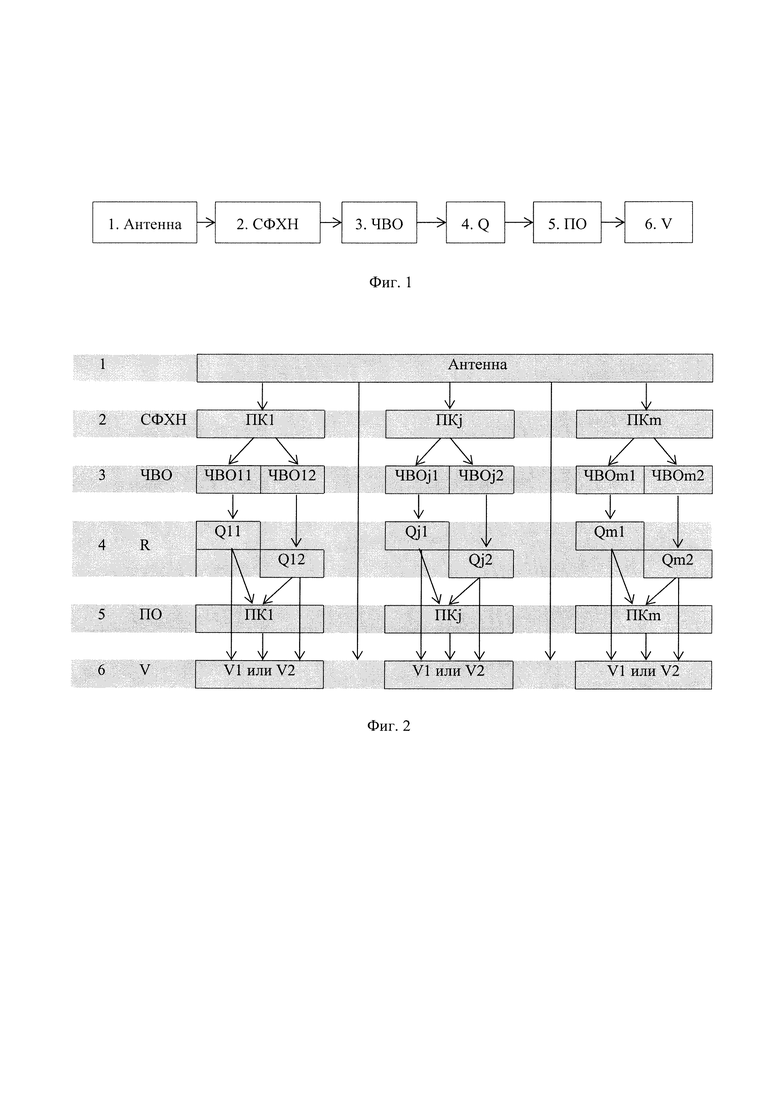
Сущность изобретения поясняется фиг. 1 и фиг. 2. На фиг. 1 изображена укрупненная блок-схема устройства, реализующего предлагаемый способ. На фиг. 2 приведена схема обработки сигнала внутри блоков устройства (фиг. 1).
Предлагаемый способ технически реализуется аппаратно-программными средствами по структурной схеме, приведенной на фиг. 1, на основе обобщенной структурной схемы типовой гидроакустической системы шумопеленгования [Корякин Ю.А., Смирнов С.А., Яковлев Г.В. Корабельная гидроакустическая техника: состояние и актуальные проблемы. СПб.: Наука, 2004]. Структурная схема включает последовательно соединенные блоки: антенна 1, блок 2 системы формирования характеристик направленности (СФХН), блок 3 частотно-временной обработки (ЧВО), блок 4 измерения отношения сигнал/помеха (R), блок 5 пороговый обнаружитель (ПО), блок 6 определения тангенциальной скорости (V).
С помощью аппаратуры (фиг. 1) заявленный способ реализуется следующим образом. Предварительно анализируют диапазон тангенциальных скоростей объектов, для обнаружения которых предназначена реализуемая аппаратура, и угловое расстояние между осями соседних лепестков характеристик направленности. Выбирают количество каналов частотно-временной обработки n и задают совокупность времен накопления τi для каждого канала согласно формуле изобретения. В процессе работы шумовой сигнал объекта, принятый антенной 1, поступает в блок 2 СФХН, где формируется совокупность пространственных каналов обработки в горизонтальной плоскости. На фиг. 2 пространственные каналы обозначены как ПКj, где j=l, m. Шумовой сигнал каждого пространственного канала одновременно поступает в блок 3 ЧВО, в котором для каждого пространственного канала формируется совокупность n каналов частотно-временной обработки. На фиг. 2 приведена схема для двух каналов частотно-временной обработки n=2, которые обозначены как ЧBOj1 (первый канал частотно-временной обработки для nKj) и ЧBOj2 (второй канал частотно-временной обработки для ПКj). В каждом канале частотно-временной обработки одновременно осуществляется квадратичное детектирование, частотная фильтрация и накопление процесса. В первом канале ЧBOj1 осуществляется накопление за время τ1. Во втором канале ЧBOj2 осуществляется накопление за время τ2. Результаты обработки всех пространственных каналов для обоих каналов частотно-временной обработки одновременно поступают в блок 4 R. В блоке 4 центрируют и нормируют к помехе результаты частотно-временной обработки процесса в совокупности пространственных каналов отдельно для двух частотно-временных обработок. В результате образуется две совокупности отношений сигнал помеха: R1 - совокупность отношений сигнал/помеха Qj1, полученная в результате первой частотно-временной обработки ЧBOj1, и R2 - совокупность отношений сигнал/помеха Qj2, полученная в результате второй частотно-временной обработки ЧBOj2. Обе совокупности отношений сигнал/помеха одновременно поступают в блок 5 ПО. В блоке 5 в каждом пространственном канале осуществляется сравнение с порогом двух отношений сигнал/помеха. Если какое-либо из отношений сигнал/помеха превышает порог, то принимается решение об обнаружении объекта в этом пространственном канале. Одновременно обе совокупности отношений сигнал/помеха поступают в блок 6 V, куда одновременно из блока 5 поступает решение об обнаружении объекта. Если Qj1>Qj2, то считают, что обнаруженный объект имеет тангенциальную скорость, соответствующую времени накопления в первом канале частотно-временной обработки. В противном случае, считают, что объект имеет тангенциальную скорость, соответствующую времени накопления во втором канале частотно-временной обработки. Количество каналов частотно-временной обработки может быть два (как показано в схеме фиг. 2) и более. Большее количество каналов позволит осуществить более точную настройку способа для оптимального обнаружения объектов с различными угловыми скоростями.
Все изложенное позволяет считать задачу изобретения решенной. Предложен способ панорамного обнаружения шумящих в море объектов, предназначенный для обнаружения объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ панорамной классификации шумящих объектов | 2017 |
|
RU2684439C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ПОЛУЧЕНИЯ ИНФОРМАЦИИ О ШУМЯЩИХ В МОРЕ ОБЪЕКТАХ | 2007 |
|
RU2353946C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| Способ панорамного обнаружения звука в море | 2021 |
|
RU2776957C1 |
| Способ обнаружения шумящих в море объектов | 2021 |
|
RU2780408C1 |
| СПОСОБ ЦВЕТОВОГО КОДИРОВАНИЯ ИНФОРМАЦИИ ГИДРОАКУСТИЧЕСКОГО ШУМОПЕЛЕНГОВАНИЯ | 2015 |
|
RU2593621C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2007 |
|
RU2339050C1 |
| Способ обнаружения шумящих в море объектов | 2018 |
|
RU2694782C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА | 2017 |
|
RU2654335C1 |
Использование: изобретение относится к области гидроакустики и предназначено для обнаружения объектов, одновременно наблюдаемых в секторном обзоре шумопеленгования. Сущность: способ основан на приеме гидроакустического шумового процесса многоэлементной антенной с развитой апертурой в горизонтальной плоскости и формировании совокупности пространственных каналов в секторе обзора, в каждом из которых одновременно осуществляют частотно-временную обработку шумового процесса. Центрируют и нормируют к помехе результаты частотно-временной обработки процесса в совокупности пространственных каналов с измерением совокупности отношений сигнал/помеха в пространственных каналах, после чего принимают решение об обнаружении объекта в тех пространственных каналах, в которых измеренное отношение сигнал/помеха превышает порог. При реализации способа задают совокупность времен накопления τi, где i - порядковый номер от 1 до n, каждое из которых оптимально для конкретной тангенциальной скорости объекта, в каждом пространственном канале одновременно осуществляют n частотно-временных обработок процесса с временами накопления τi, соответственно, а по результатам центрирования, нормирования и сравнения отношения сигнал/помеха с порогом принимают решение об обнаружении объекта с конкретной тангенциальной скоростью. Технический результат: увеличение отношения сигнал/помеха для всех шумящих объектов, одновременно наблюдаемых в секторном обзоре, вне зависимости от скорости их углового перемещения. 2 ил.
Способ панорамного обнаружения шумящих в море объектов, в котором принимают гидроакустический шумовой процесс многоэлементной антенной с развитой апертурой в горизонтальной плоскости, формируют совокупность пространственных каналов в секторе обзора (горизонтальный веер характеристик направленности), в каждом из которых одновременно осуществляют частотно-временную обработку шумового процесса, для чего последовательно осуществляют квадратичное детектирование, частотную фильтрацию и накопление процесса, центрируют и нормируют к помехе результаты частотно-временной обработки процесса в совокупности пространственных каналов с измерением совокупности отношений сигнал/помеха, принимают решение об обнаружении объекта по превышению измеренного отношения сигнал/помеха порогового значения, отличающийся тем, что: задают совокупность времен накопления τi=ϕ/Vi, где ϕ=const - угловое расстояние между осями соседних лепестков характеристик направленности, Vi - совокупность тангенциальных скоростей объекта, i - порядковый номер от 1 до n, в каждом пространственном канале одновременно осуществляют n частотно-временных обработок процесса с временами накопления τi, соответственно, отдельно центрируют и нормируют к помехе результаты каждой из частотно-временных обработок процесса по совокупности пространственных каналов с измерением отдельных совокупностей отношений сигнал/помеха Ri, соответственно, решение об обнаружении объекта принимают для тех пространственных каналов, в которых хотя бы одно отношение сигнал/помеха из совокупностей Ri, превышает пороговое значение, считают, что обнаружен объект с тангенциальной скоростью Vi, если отношение сигнал/помеха из совокупности Ri максимально.
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2300118C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
| Устройство получения информации о шумящем в море объекте | 2017 |
|
RU2654365C1 |
| CN 104765039 B, 13.06.2017. | |||

