Настоящее изобретение относится к области гидроакустики и предназначено для отображения результатов обработки сигналов шумоизлучения и распознаванию гидроакустических объектов.
Известны методы обнаружения и классификации целей по анализу особенностей их шумоизлучения, где используют признаки, основанные на особенностях спектрального состава сигнала, так называемого "портрета". (В.С. Бурдик "Анализ гидроакустических систем " Ленинград Судостроение 1988 г. стр. 322)
Более подробно акустические "портреты" рассмотрены в работе Л.Л. Мясников, Е.Н. Мясникова "Автоматическое распознавание звуковых образов". Ленинград. Энергия 1970 г., стр. 50. Классификация с использованием портретов основана на измерении спектра, отображении спектра на индикаторе и сравнении его с эталонным частотным спектром, принадлежащим известному источнику шумоизлучения. Недостатком такого способа является необходимость иметь эталонные спектры всех источников шумоизлучения, что практически невозможно. Кроме того, спектральные портреты зависят от скорости движения объекта шумоизлучения.
Известен способ классификации, описанный в работе (В.В. Деев и др. "Анализ информации оператором - гидроакустиком ", Ленинград Судостроение 1989 г. стр. 111), который содержит прием сигналов шумоизлучения шумящего объекта приемной антенной, вычисление оценки комплексного спектра принятых сигналов шумоизлучения, анализ спектрального состава, выделение дискретных составляющих, построение звукорядов, отображение спектров на индикаторе и принятие решения о классе шумящего объекта по особенностям спектрального состава принятых сигналов шумоизлучения.
Однако для современных подводных объектов характерно уменьшение числа дискретных составляющих, в результате чего дискретные структуры спектров становятся малоинформативными, что делает классификацию по дискретным составляющим неэффективной.
Известен патент РФ 2156984 на «Способ получения информации о шумящем в море объекте и способ получения цветовых шкал для него». В способе измеряются отношения сигнал/шум на выходах частотных фильтров, которые кодируются интенсивностью красных, зеленых и синих цветовых компонент на экране, где производится смешивание цветовых компонент в единой точке и образуется цвет, несущий информацию о расстоянии до шумящего объекта. Отображение цветовых образов в координатах угол-время позволяет получать на панорамном индикаторе трассы всех наблюдаемых одновременно объектов.
Недостатком данного способа является то, что при наличии кратковременных сигналов, которые обусловлены сигналами различных источников, принадлежащих морской биоакустике, весь панорамный индикатор оказывается забит случайными сигналами, образующими случайную засветку на всей плоскости пространственных характеристик и времени наблюдения. В этом случае основная трасса, которая принадлежит реальной цели, плохо отображается на фоне случайных выбросов сигнала шумоизлучения источников морской биоакустики. Под реальной целью понимается подвижный объект техногенного происхождения - подводная лодка, надводный корабль, подводный аппарат и т.д. Сигнал от реальной цели представляет собой постоянный стационарный процесс шумоизлучения.
В работе В.А. Антипов и др. «Консервация информации гидроакустического комплекса корабля и ее дальнейшее использование». Гидроакустика вып. 22(2) 2015 г. ОАО Концерн «Океанприбор». СПб стр. 93-98. представлены результаты адаптивной мультипликативной обработки сигналов шумоизлучения обнаруженных объектов, выводимой на панорамный индикатор. По оси абсцисс расположена шкала пеленгов и курсовых углов, ниже поле графики, в котором отображаются отметки сигналов от шумящей цели на фоне мешающих целей и отметок по времени. Хорошо видны трассы, принадлежащие целям различных классов, находящихся на различных направлениях и различных дальностях. Эта система отображения выходной информации системы шумопеленгования наиболее близко соответствует предлагаемому способу отображения и может быть взята за прототип.
Система отображения реализует следующие признаки способа отображения. Прием сигнала осуществляется статическим веером характеристик направленности. С выхода каждого пространственного канала производится набор дискретизированных отсчетов на фиксированном временном интервале. Производится спектральный анализ временного набора отсчетов с выхода каждого пространственного канала, который выполняется с использованием процедуры БПФ. С выхода каждого пространственного канала выделенный спектр разделяется на частотные диапазоны. Сумма амплитуд спектральных составляющих определяет уровень сигнала шумоизлучения, который подается на яркостной индикатор и последовательно во времени отображается информация в яркостном виде в нескольких частотных диапазонах, каждый из которых имеет свою цветовую окраску.
Недостатком данного способа отображения информации является то, что при наличии сигналов излучения источников морской биоакустики возникают помехи, которые затрудняют обнаружения трасс от малошумящих реальных объектов на фоне мешающего шумоизлучения источников морской биоакустики.
Задачей изобретения является обеспечение эффективности отображения сигналов шумоизлучения реальных объектов.
Технический результат изобретения состоит в обеспечении возможности отображения реальных источников шумоизлучения, имеющих стационарные дискретные составляющие в спектре сигнала, при подавлении сигналов от объектов биоакустики, спектр которых является случайным, что позволяет исключить из отображения сигналы биологических шумов.
Для решения поставленной задачи в способ, содержащий прием сигнала статическим веером из S характеристик направленности, с выхода каждого пространственного канала производят набор дискретизированных отсчетов на фиксированным временном интервале Т, производят спектральный анализ временного набора отсчетов с выхода каждого пространственного канала, который выполняют с использованием процедуры БПФ, с выхода каждого пространственного канала выделенный спектр разделяют на k частотных диапазонов, определяют сумму амплитуд ∑Ajk спектральных составляющих каждого частотного диапазона в каждом канале, и отображают на индикаторе информацию в цветном яркостном виде введены новые признаки а именно: в качестве уровня помехи выбирают минимальное значение суммы ∑Ajmin амплитуд сигнала в пространственном канале, для выбора порога определяют среднее значение суммы амплитуд  по всем пространственным каналам S текущего временного интервала по каждому частотному диапазону, определяют порог Akпор по каждому частотному диапазону как
по всем пространственным каналам S текущего временного интервала по каждому частотному диапазону, определяют порог Akпор по каждому частотному диапазону как  определяют пространственные каналы, в которых
определяют пространственные каналы, в которых  в каждом частотном диапазоне и определяют из них соседние, запоминают те соседние пространственные каналы, в которых это условие соблюдается более чем для N соседних пространственных каналов, повторяют операции измерения и сравнения по V последовательным временным наборам и для отображения на индикаторе выводят те соседние пространственные каналы, в которых наблюдается превышение порога во всех V временных интервалах.
в каждом частотном диапазоне и определяют из них соседние, запоминают те соседние пространственные каналы, в которых это условие соблюдается более чем для N соседних пространственных каналов, повторяют операции измерения и сравнения по V последовательным временным наборам и для отображения на индикаторе выводят те соседние пространственные каналы, в которых наблюдается превышение порога во всех V временных интервалах.
Поясним сущность предлагаемого технического решения.
При работе системы шумопеленгования в реальных условиях возникают ситуации, когда одновременно с приемом сигнала шумоизлучения реальных объектов на вход антенны обнаружения поступают сигналы неизвестного происхождения, которые являются сигналами торошения льда в северных широтах, а так же звуковыми сигналами, вызванными различными обитателями морских глубин. В работе В.Н Таволга «Морская биоакустика». Судостроение. Л. 1969 г. представлен большой объем исследований по характеру сигналов шумоизлучения, принадлежащих морской биоакустике.
Как правило, частотные спектры шумоизлучения источников морской биоакустики совпадают с диапазоном частот работы станций шумопеленгования, что приводит к искажению достоверности обнаружения сигналов шумоизлучения реальных объектов. Поэтому при работе в таких условиях возникает задача автоматического устранения сигналов шумоизлучения, которые не принадлежат реальным объектам. Основная особенность, сигналов биоакустики состоит в том, что сигналы возникают случайно, в случайном направлении, имеют случайную продолжительность, случайный диапазон частот, а так же случайное время существования. Поэтому исходными параметрами для классификации таких источников шумоизлучения можно выбрать определенные свойства сигналов шумоизлучения, которые принадлежат реальным объектам. К таким параметрам относятся, прежде всего, частотные диапазоны формирования сигналов шумоизлучения, уровни сигналов, время их существования. Кроме того, к особенностям шумоизлучения морской биоакустики относится изменчивость уровня принимаемого суммарного сигнала, что связано, прежде всего, с различным положением шумов биологического происхождения по дистанции и по направлению. Как правило, достаточный мешающий уровень может быть создан при одновременном излучении большого числа морских биологических объектов, которые имеют некоторое случайное компактное положение и одновременное излучение. Поэтому уровень шумоизлучения этих сигналов имеет большой разброс по пространству и по дальности, что сказывается на их статистических характеристиках. Сигнал шумоизлучения реальных объектов более стабилен в конкретных частотных диапазонах, что объясняется стабильной работой механизмов и равномерным прямолинейным движением с постоянной скоростью.
Частотные диапазоны, как правило, являются принадлежностью конкретной гидроакустической системы, которая может использоваться в различных условиях. Может быть использован один частотный диапазон, может быть два частотных диапазона, может быть три и более, что определяется используемой антенной и решаемыми задачами в конкретных условиях.
Поскольку сигналы излучения морской биоакустики носят случайный характер и их энергетические и статистические характеристики неизвестны, то предлагается процедура искусственного сокращения числа мешающих отметок на индикаторе, которые обусловлены сигналами морской биоакустики с использованием признаков реальных сигналов. Как правило, уровень одиночного излучения сигнала морской биоакустике меньше, чем сигнал шумоизлучения цели и длительность его на экране панорамного индикатора ограничена и по времени и по пространству. Сигнал шумоизлучения реальной малошумной цели по пространству отображается на индикаторе не больше, чем в 4-5 пространственных каналах, а по времени длина трассы определяется временем сопровождения. Таким образом, имеются некоторые параметры, которые позволяют ограничить объем отображаемых сигналов морской биоакустики, выводимых на индикатор. По пространству эти сигналы формируются точечным источником шумоизлучения, поэтому на индикаторе трасса имеет случайную протяженность, определяемую протяженностью положения сигналов биоакустики, амплитуды которых случайно суммируются по пространству и по времени. Кроме того, протяженность по времени сигнала одиночного источника ограничена длительностью излучения не более 100 мс, которая определяется физическими возможностями биологического источника (В.Н Таволга «Морская биоакустика». Судостроение. Л. 1969 г). Это существенно меньше, чем протяженность по времени сигнала шумоизлучения реальной цели на трассе, которая отображается на индикаторе. Поскольку на одном направлении могут находиться достаточно много одиночных источников излучения (там же), то амплитуды этих сигналов могут суммироваться случайным образом, формируя случайный шумовой процесс по времени и по пространству. Это приводит к случайному отображению объекта биоакустики на экране индикатора по времени или появлению нестационарных трасс по пространству. Поскольку они суммируются не когерентно, то суммарная амплитуда таких трасс будет меньше, чем амплитуды трасс объектов, а сами трассы на индикаторе будут кратковременны по протяженности. В качестве исходного порога может быть выбрано минимальное значение отображаемого сигнала в одном из пространственных каналов ∑Ajmin, где нет сигнала шумоизлучения биоакустики и нет сигнала шумоизлучения реальной цели, что будет соответствовать уровню шумовой помехи, обусловленной уровнем внешнего пространственного шума на входе антенны, который зависит от скорости движения и внешних шумов судоходства. Этот подход исходит из того факта, что не на всех пространственных каналах статического веера характеристик направленности, выводимых в текущем временном интервале, наблюдается сигнал шумоизлучения биоакустики или сигнал шумоизлучения цели. В качестве энергии сигнала используется сумма спектральных составляющих каждого пространственного канала на текущем временном интервале для каждого частотного диапазона. В каждом пространственном канале и в каждом частотном диапазоне определяется энергия как сумма амплитуд спектральных составляющих на выходе процессора БПФ. Для выбора порога следует определить среднее значение суммы амплитуд по всем пространственным каналам текущего временного интервала по каждому частотному диапазону. Это значение должно быть больше, чем минимальное значение, измеренное в канале по каждому частотному диапазону. Выбирается порог Аkпор равный среднему значению плюс минимальный уровень, измеренный по каждому частотному диапазону, определяемый собственными шумами, то есть  Выбираются пространственные каналы, в которых сумма амплитуд превысила порог в каждом частотном диапазоне. Выбираются соседние пространственные каналы, в которых сумма амплитуд превысила порог в каждом частотном диапазоне. Запоминаются N и более соседних пространственных каналов, в которых сумма амплитуд превысила порог в каждом частотном диапазоне. Повторяют измерение и сравнение в V последовательных временных интервалах. На индикатор выводятся только те соседние пространственные каналы, в которых сумма амплитуд превысила порог в каждом частотном диапазоне по V последовательным временным наборам и N пространственным каналам. Поэтому кратковременные сигналы по времени и по пространству, принадлежащие сигналам морской биоакустики не будут отображаться. В процессе работы в реальных условиях, число пространственных каналов (порог по пространству) и число временных интервалов обработки (порог по времени) можно изменить, что позволит адаптировать алгоритм работы к конкретным источникам шумоизлучения не только морской биоакустики, но к источникам торошения льда в северных широтах, источникам шумоизлучения, связанным с шумом берегового прибоя и т.д.
Выбираются пространственные каналы, в которых сумма амплитуд превысила порог в каждом частотном диапазоне. Выбираются соседние пространственные каналы, в которых сумма амплитуд превысила порог в каждом частотном диапазоне. Запоминаются N и более соседних пространственных каналов, в которых сумма амплитуд превысила порог в каждом частотном диапазоне. Повторяют измерение и сравнение в V последовательных временных интервалах. На индикатор выводятся только те соседние пространственные каналы, в которых сумма амплитуд превысила порог в каждом частотном диапазоне по V последовательным временным наборам и N пространственным каналам. Поэтому кратковременные сигналы по времени и по пространству, принадлежащие сигналам морской биоакустики не будут отображаться. В процессе работы в реальных условиях, число пространственных каналов (порог по пространству) и число временных интервалов обработки (порог по времени) можно изменить, что позволит адаптировать алгоритм работы к конкретным источникам шумоизлучения не только морской биоакустики, но к источникам торошения льда в северных широтах, источникам шумоизлучения, связанным с шумом берегового прибоя и т.д.
Таким образом, решается задача исключения из отображаемой информации на индикаторе сигналов шумоизлучения морских биологических объектов за счет предварительной селекции выводимой информации по уровню шумоизлучения, по пространственному положению источника шумоизлучения, по наличию стабильной трассы источника шумоизлучения во времени.
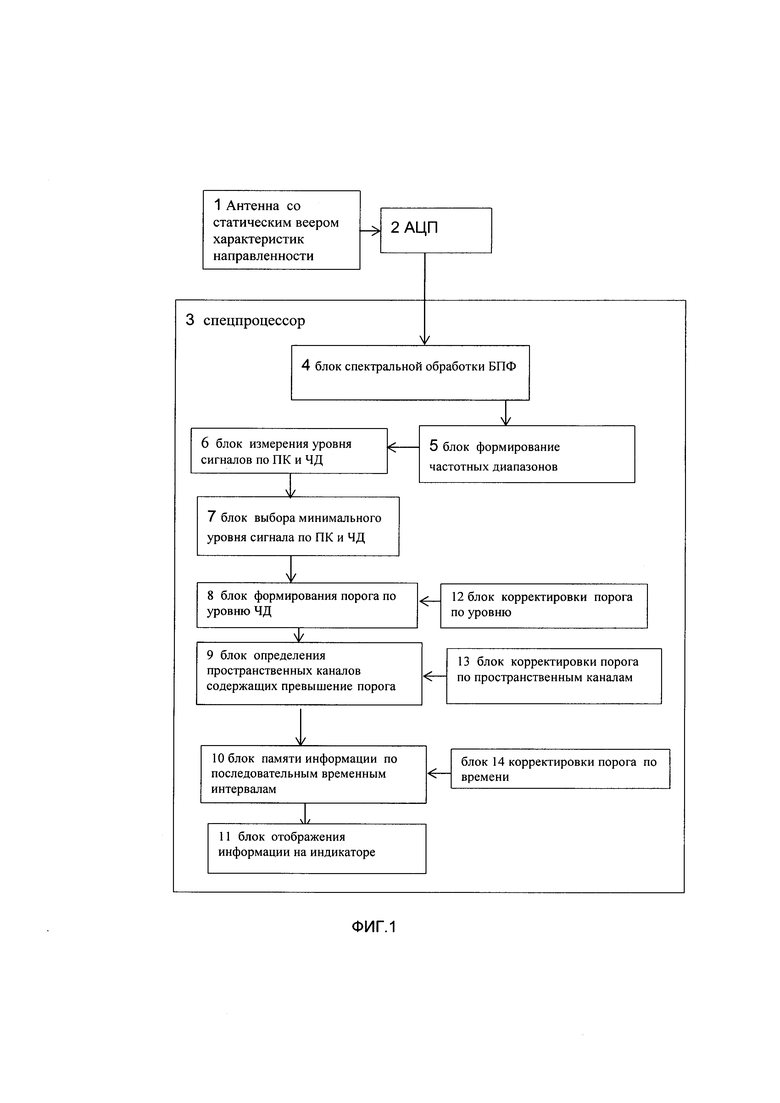
Сущность изобретения поясняется фиг. 1, на которой представлена блок-схема системы, реализующей предлагаемый способ.
Система шумопеленгования (фиг 1) содержит последовательно соединенные антенну 1 со статическим веером характеристик направленности, аналогово-цифровой преобразователь 2 АЦП и спецпроцессор 3. Спецпроцессор 3 содержит последовательно соединенные блок 4 спектральной обработки БПФ, блок 5 формирования частотных диапазонов, блок 6 измерения уровня сигналов по каждому пространственному каналу и каждому частотному диапазону, блок 7 выбора минимального уровня сигнала по пространственному каналу в каждом частотном диапазоне, блок 8 формирования порога, блок 9 определения пространственных каналов содержащих превышение порога, блок 10 памяти информации по последовательным временным интервалам, блок 11 отображения информации на индикаторе. Выход блока 12 корректировки порога соединен со вторым входом блока 9, выход блока 13 корректировки по пространственным каналам соединен со вторым входом блока 9,выход блока 14 корректировки по времени соединен со вторым входом блоком 10.
Сигнал шумозлучения объекта принимается статическим веером характеристик направленности системы шумопеленгования 1 и передается на многоканальный аналогово-цифровой преобразователь, который формирует временную последовательность по всем пространственным каналам. Эта последовательность временных отсчетов поступает в блок 4 спецпроцессора 3 спектральной обработки БПФ.
Система шумопеленгования со статическим веером характеристик направленности является известным устройством, которое используется в современной гидроакустической технике. (Корякин Ю.А. Смирнов С.А. Яковлев Г.В. «Корабельная гидроакустическая техника» Санкт Петербург. Изд. Наука 2004 г. на стр. 46)
Цифровые спецпроцессоры являются известными устройствами, которые предназначены для осуществления конкретных алгоритмов обработки с использованием аппаратных решений и жесткой логикой вычислений. Их применение повышает быстродействие цифровых вычислительных систем в несколько раз, и в большинстве случаев сокращает аппаратные затраты. Описания спецпроцессоров приведены в книге Корякин Ю.А. Смирнов С.А. Яковлев Г.В. «Корабельная гидроакустическая техника» Санкт Петербург. Изд. Наука 2004 г. на стр. 281. Там же приведено описание гидроакустических комплексов, построенных на основе спецпроцессоров стр. 296., стр. 328.
Реализацию заявленного способа целесообразно рассмотреть на примере работы устройства (фиг. 1).
Определенные в блоке 4 спектры сигналов шумоизлучения поступают в блок 5 формирования частотных диапазонов, в которых производится выделение энергетических и спектральных параметров сигнала. В каждом пространственном канале производится идентичная полосовая обработка принятых сигналов с целью отображения уровня сигналов обнаруженных целей по пространству и по времени. Что бы не забивать на экране отображения ненужной информацией, которая ухудшает наблюдение и принятие решения оператором, производится предварительная селекция. Селекция производится по уровню принятых сигналов в частотных диапазонах, по пространственному отображению и по времени существования сигнала. Предварительно выбирается порог, который формируется по минимальному уровню сигнала в частотных диапазонах в одном из пространственных каналов в блоке 7. Как уже говорилось, уровень этого сигнала соответствует уровню внешнего пространственного шума на входе антенны, который зависит от скорости движения и внешних шумов судоходства. Для снижения вероятности ложной тревоги пороговый уровень должен быть выше этого уровня. Для этого определятся средний уровень принимаемых сигналов по всем пространственным каналам и средний уровень минимального сигнала, и устанавливается порог равный  Определение порога производится в блоке 8 по каждому частотному диапазону. Это связано с тем, что сигнал от реальной цели существует во всех частотных диапазонах, а сигнал шумов биоакустики не может существовать во всех частотных диапазонах в силу специфики формирования, которая ограничена физическими возможностями биологического источника. В блоке 9 производится выбор пространственных каналов, в которых уровень сигнала превысил порог в N и более соседних пространственных каналах одновременно в выбранных частотных диапазонах. В блоке 10 определяется временная протяженность сигнала шумоизлучения, для чего запоминаются информация по пространственным каналам на протяжении, по крайней мере, V последовательных временных интервалов. Таким образом, отсеиваются сигналы, ограниченные порогами по уровню, по частотным диапазонам, по времени и по пространству. В известных условиях наблюдались 3 соседних пространственных канала и 3 последовательных временных интервала, что позволяло исключить конкретный вид биоакустики. После выполнения этих условий принимается решение о наличии сигнала от реальной цели и выдается команда на отображении сигнала на индикаторе. В процессе работы могут встречаться неизвестные источники шумоизлучения, которые будут затруднять процедуру обнаружения и слежения за сигналом от реального объекта. Для корректировки решения об отображении предусмотрены дополнительные блоки 12 корректировки порога по уровню, блок 13 корректировки порога по пространству и блок 14 корректировки порога по времени. Вопросы, связанные с цифровой обработкой сигналов, которая обеспечивает последовательную процедуру использования разрабатываемых алгоритмов, рассмотрены в пособии А.Б. Сергиенко «Цифровая обработка сигналов» Санкт Петербург 2011 г.
Определение порога производится в блоке 8 по каждому частотному диапазону. Это связано с тем, что сигнал от реальной цели существует во всех частотных диапазонах, а сигнал шумов биоакустики не может существовать во всех частотных диапазонах в силу специфики формирования, которая ограничена физическими возможностями биологического источника. В блоке 9 производится выбор пространственных каналов, в которых уровень сигнала превысил порог в N и более соседних пространственных каналах одновременно в выбранных частотных диапазонах. В блоке 10 определяется временная протяженность сигнала шумоизлучения, для чего запоминаются информация по пространственным каналам на протяжении, по крайней мере, V последовательных временных интервалов. Таким образом, отсеиваются сигналы, ограниченные порогами по уровню, по частотным диапазонам, по времени и по пространству. В известных условиях наблюдались 3 соседних пространственных канала и 3 последовательных временных интервала, что позволяло исключить конкретный вид биоакустики. После выполнения этих условий принимается решение о наличии сигнала от реальной цели и выдается команда на отображении сигнала на индикаторе. В процессе работы могут встречаться неизвестные источники шумоизлучения, которые будут затруднять процедуру обнаружения и слежения за сигналом от реального объекта. Для корректировки решения об отображении предусмотрены дополнительные блоки 12 корректировки порога по уровню, блок 13 корректировки порога по пространству и блок 14 корректировки порога по времени. Вопросы, связанные с цифровой обработкой сигналов, которая обеспечивает последовательную процедуру использования разрабатываемых алгоритмов, рассмотрены в пособии А.Б. Сергиенко «Цифровая обработка сигналов» Санкт Петербург 2011 г.
Таким образом, обеспечивается уменьшение ложных трасс и случайных сигналов на экране индикатора. Полученные данные дают повышенную вероятность того, что последующие оценки выводимых спектров будут принадлежать реальной цели, а не источнику биологического шума.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ отображения гидроакустической информации | 2019 |
|
RU2733938C1 |
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ обработки кратковременного нестационарного случайного процесса шумоизлучения | 2023 |
|
RU2808947C1 |
| Способ пассивного определения пространственного положения обнаруженного шумящего в море подводного объекта позиционным стационарным гидроакустическим комплексом | 2023 |
|
RU2810698C1 |
| Гидроакустический способ управления торпедой | 2017 |
|
RU2649675C1 |
| Способ обнаружения зондирующих сигналов | 2022 |
|
RU2791163C1 |
| Способ обработки сигнала шумоизлучения цели | 2022 |
|
RU2776442C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ ДО ШУМЯЩЕГО ОБЪЕКТА | 2014 |
|
RU2550576C1 |
| ГИДРОАКУСТИЧЕСКИЙ СПОСОБ ИЗМЕРЕНИЯ ДИСТАНЦИИ С ПОМОЩЬЮ ВЗРЫВНОГО ИСТОЧНИКА | 2013 |
|
RU2541699C1 |
| Способ измерения скорости движения цели гидролокатором | 2017 |
|
RU2658528C1 |
Настоящее изобретение относится к области гидроакустики и предназначено для отображения результатов обработки сигналов шумоизлучения и распознавания гидроакустических объектов. Предложен способ отображения гидроакустической информации, содержащий прием сигнала статическим веером из S характеристик направленности, при котором с выхода каждого пространственного канала производят набор дискретизированных отсчетов на фиксированном временном интервале Т, производят спектральный анализ временного набора отсчетов с выхода каждого пространственного канала, который выполняют с использованием процедуры БПФ, с выхода каждого пространственного канала выделенный спектр разделяют на k частотных диапазонов, определяют сумму ∑Ajk амплитуд Аj спектральных составляющих каждого частотного диапазона в каждом канале и отображают на индикаторе информацию в цветном яркостном виде, в котором в качестве уровня помехи выбирают минимальное значение суммы ∑Ajmin амплитуд сигнала в пространственном канале, а для выбора порога определяют среднее значение суммы амплитуд  по всем S пространственным каналам текущего временного интервала, по каждому частотному диапазону определяют порог Аkпор по каждому частотному диапазону как
по всем S пространственным каналам текущего временного интервала, по каждому частотному диапазону определяют порог Аkпор по каждому частотному диапазону как  определяют соседние пространственные каналы, в которых ∑Аjk > Аkпор в каждом частотном диапазоне, те соседние пространственные каналы, в которых это условие соблюдается более чем для N соседних пространственных каналов, повторяют операции измерения и сравнения по V последовательным временным наборам. 1 ил.
определяют соседние пространственные каналы, в которых ∑Аjk > Аkпор в каждом частотном диапазоне, те соседние пространственные каналы, в которых это условие соблюдается более чем для N соседних пространственных каналов, повторяют операции измерения и сравнения по V последовательным временным наборам. 1 ил.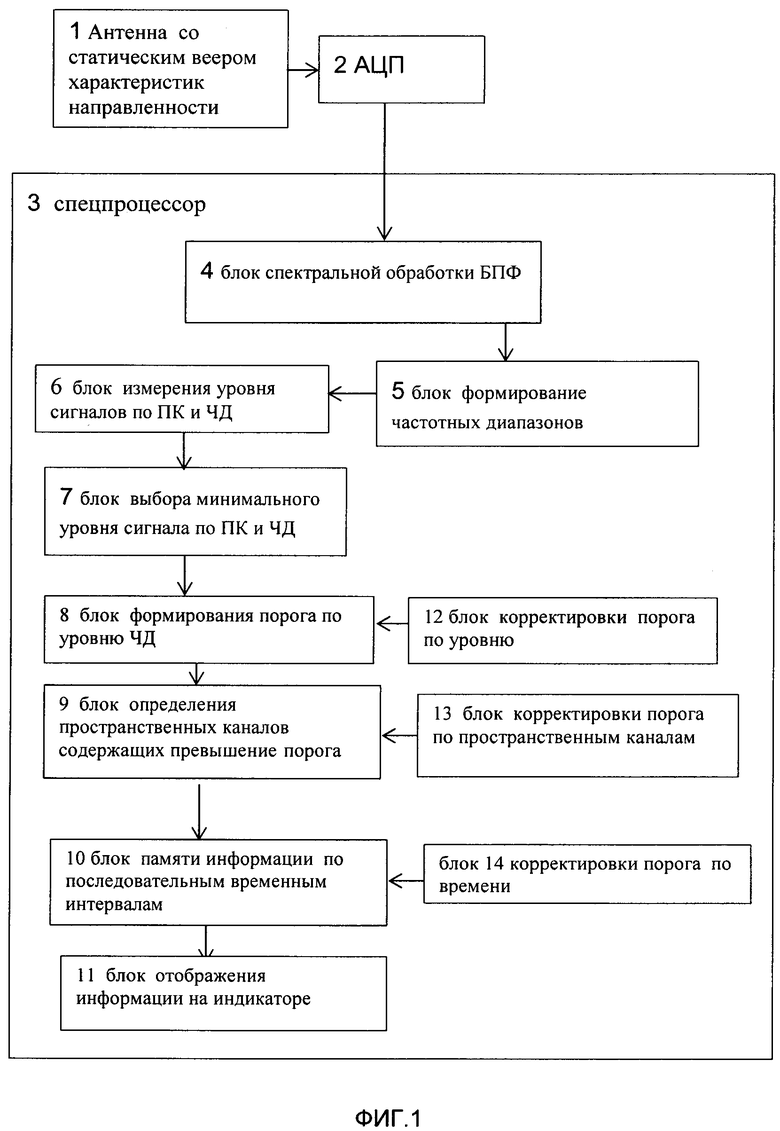
Способ отображения гидроакустической информации, содержащий прием сигнала статическим веером из S характеристик направленности, при котором с выхода каждого пространственного канала производят набор дискретизированных отсчетов на фиксированном временном интервале Т, производят спектральный анализ временного набора отсчетов с выхода каждого пространственного канала, который выполняют с использованием процедуры БПФ, с выхода каждого пространственного канала выделенный спектр разделяют на k частотных диапазонов, определяют сумму амплитуд ∑Аjk спектральных составляющих каждого частотного диапазона в каждом канале и отображают на индикаторе информацию в цветном яркостном виде, отличающийся тем, что в качестве уровня помехи выбирают минимальное значение суммы ∑Ajmin амплитуд сигнала в пространственном канале, для выбора порога определяют среднее значение суммы амплитуд  по всем пространственным каналам S текущего временного интервала по каждому частотному диапазону, определяют порог Аkпор по каждому частотному диапазону как
по всем пространственным каналам S текущего временного интервала по каждому частотному диапазону, определяют порог Аkпор по каждому частотному диапазону как  определяют пространственные каналы, в которых ∑Аjk > Аkпор в каждом частотном диапазоне, и определяют из них соседние, запоминают те соседние пространственные каналы, в которых это условие соблюдается более чем для N соседних пространственных каналов, повторяют операции измерения и сравнения по V последовательным временным интервалам и для отображения на индикаторе выводят те соседние пространственные каналы, в которых наблюдается превышение порога во всех V временных интервалах.
определяют пространственные каналы, в которых ∑Аjk > Аkпор в каждом частотном диапазоне, и определяют из них соседние, запоминают те соседние пространственные каналы, в которых это условие соблюдается более чем для N соседних пространственных каналов, повторяют операции измерения и сравнения по V последовательным временным интервалам и для отображения на индикаторе выводят те соседние пространственные каналы, в которых наблюдается превышение порога во всех V временных интервалах.
| Способ классификации гидроакустических сигналов шумоизлучения морских объектов | 2018 |
|
RU2711406C1 |
| Способ классификации эхо-сигнала гидролокатора | 2017 |
|
RU2660219C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2015 |
|
RU2603886C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ ОБЪЕКТА В ВОДНОЙ СРЕДЕ | 2015 |
|
RU2602759C1 |
| СПОСОБ КЛАССИФИКАЦИИ ГИДРОАКУСТИЧЕСКИХ СИГНАЛОВ ШУМОИЗЛУЧЕНИЯ МОРСКОГО ОБЪЕКТА | 2013 |
|
RU2546851C1 |
| US 20110128820 A1, 02.06.2011. | |||

