Область техники, к которой относится изобретение
Настоящее изобретение относится к системе предупреждения согласно родовому понятию независимого пункта формулы изобретения. Изобретение относится, в частности, к системе предупреждения, выполненной с возможностью облегчения совершения обгона для водителей.
Уровень техники
В настоящее время для легковых и грузовых автомобилей существуют системы, выполненные с возможностью контроля полос движения на одной или обеих сторонах транспортного средства для проверки того, находятся ли транспортные средства около рассматриваемого транспортного средства, например в слепой зоне автомобиля. Эти системы указывают водителю, имеется ли транспортное средство на какой-либо соседней полосе движения, путем формирования некоторой формы визуального предупреждения рядом с зеркалом заднего вида или на передней стойке, то есть части кузова транспортного средства, расположенной впереди относительно передних дверей, служащей в качестве стойки крыши, и на сторонах которой закреплено ветровое стекло. Предупреждение может также принимать форму звукового предупреждения, которое может быть объединено с визуальным предупреждением. Если водитель начинает движение по полосе движения, в которой уже имеется транспортное средство, предупреждение будет усиливаться.
Патенты, ссылка на которые приведена ниже, являются примерами систем, выполненных с возможностью указания и предупреждения водителей транспортных средств об объектах окружающей обстановки.
US-2010/0020170 относится к системе обработки изображения для транспортного средства, которое выполнено в том числе с возможностью идентификации объекта сзади или около транспортного средства и затем показа на зеркале заднего вида или рядом с ним более четкой версии объекта. Например, это можно выполнить путем формирования картинки, которая накладывается на зеркала для более ясного представления объекта водителю.
EP-2073185 относится к способу и устройству для формирования и представления предупреждающих сигналов, если объект обнаружен за пределами транспортного средства, например, можно обнаружить скорость объекта. Например, предупреждения отображаются рядом со стойками транспортного средства.
US-7079017 относится к системе предупреждения для моторных транспортных средств. Система содержит датчик для обнаружения препятствий поблизости от транспортного средства, устройство для формирования сигнала в ответ на обнаруженное препятствие и устройство индикации, которое формирует сигнал тревоги для водителя. В частности, система предупреждения выполнена с возможностью побуждения водителя обращать внимание в ту сторону, где находится препятствие, например, это можно сделать путем размещения светоизлучающих диодов (LED) рядом с зеркалами заднего вида и обеспечения их мигания в случае, если внимание водителя должно быть обращено на препятствия, которые видны в конкретном зеркале заднего вида.
US-2009/0063053 относится к способу и системе для идентификации слепых зон и подачи предупреждений с помощью визуальных индикаторов, например, посредством LED или экранов. Например, визуальные индикаторы определяются на основании относительной скорости транспортного средства, приближающегося сзади, относительно рассматриваемого транспортного средства.
DE-102008003936 относится к устройству, выполненному с возможностью представления на зеркале заднего вида предупреждающих сообщений, касающихся грузового транспортного средства, которые предоставляют, между прочим, индикацию относительной скорости между рассматриваемым транспортным средством и соседним транспортным средством.
В случае обгона, особенно в случае грузовых автомобилей, которые имеют большое расстояние разгона, важно правильно оценивать скорость транспортных средств, приближающихся сзади в полосе движения, которая должна в дальнейшем использоваться для обгона. Скорость транспортных средств, приближающихся сзади, трудно оценить беглым взглядом на зеркало заднего вида.
В случае грузовых автомобилей недостаточно знать, что около рассматриваемого транспортного средства находится другое транспортное средство, поскольку рассматриваемое транспортное средство может быть очень длинным. Поэтому также важно знать местоположение в продольном направлении транспортного средства на соседней полосе движения относительно рассматриваемого транспортного средства. Существуют решения, которые направлены на эту проблему путем установки вокруг грузового автомобиля множества зеркал количеством вплоть до семи. Это означает, что когда необходимо убедиться, что транспортное средство может продолжать движение безопасным образом, водитель должен посмотреть на все эти зеркала, отвлекая внимание от других систем на приборной доске, что, в свою очередь, может отрицательно сказаться на управлении транспортным средством.
Таким образом, существует потребность в том, чтобы упростить для водителя контроль обстановки вокруг рассматриваемого транспортного средства при смене полосы движения, не внося вклад в еще большее усложнение окружающей обстановки для водителя.
Задача настоящего изобретения состоит в создании системы предупреждения, которая устраняет недостатки современных систем.
Раскрытие изобретения
Вышеупомянутые задачи решаются настоящим изобретением, определенным независимым пунктом формулы изобретения.
Предпочтительные варианты осуществления определены в зависимых пунктах формулы изобретения.
Решение согласно настоящему изобретению содержит выполнение системы предупреждения, выполненной с возможностью показа того, откуда может возникать критическая ситуация путем привлечения внимания водителя в направлении конкретной визуальной области. Например, это можно достичь путем увеличения изображения в части зеркала заднего вида там, где существует опасная ситуация или путем освещении вокруг зеркала, например, его верхнего или нижнего участка, в зависимости от того, находится ли транспортное средство близко (нижняя часть зеркала) или далеко и приближается ли с высокой скоростью (верхняя часть зеркала).
Возникающие ситуации могут также относиться к объекту (транспортному средству), которое не видно в зеркалах, например, впереди справа рассматриваемого транспортного средства. В таких случаях внимание водителя должно быть обращено, соответственно, например, на формирование визуальных предупреждений в соответствующем направлении.
Согласно настоящему изобретению система индикации имеет ряд преимуществ. Одно из них состоит в том, что увеличивается участок изображения в зеркале, где находится критическое транспортное средство, позволяя водителю иметь лучший вид окружающей обстановки вокруг своего транспортного средства. В частности, это применяется при смене полосы движения.
Система индикации также выполнена с возможностью включения информации относительно того, что водитель видит на изображении, например, предупреждение о транспортном средстве, которое движется с высокой скоростью, тогда как отсутствие предупреждения формируется в случае транспортного средства, которое находится далеко и движется с низкой скоростью.
Краткое описание чертежей
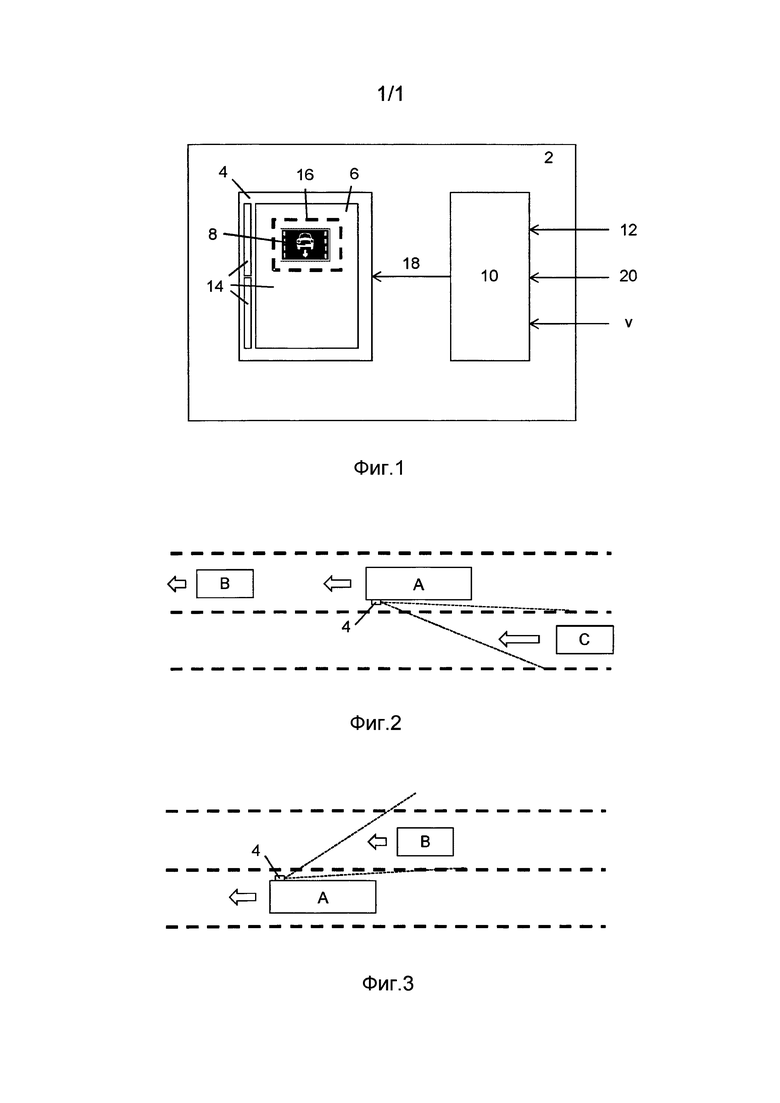
Фиг. 1 - блок-схема, иллюстрирующая ряд вариантов осуществления настоящего изобретения.
Фиг. 2 - схема дороги с двумя полосами движения, иллюстрирующая первый аспект настоящего изобретения.
Фиг. 3 - схема дороги с двумя полосами движения, иллюстрирующая второй аспект настоящего изобретения.
Осуществление изобретения
Изобретение будет теперь описано более подробно со ссылкой на блок-схему, показанную на фиг. 1. Таким образом, изобретение относится к системе 2 предупреждения для транспортного средства, например грузового автомобиля, автобуса или легкового автомобиля. Система содержит по меньшей мере одно устройство 4 наблюдения с поверхностью 6 наблюдения, выполненной с возможностью представления объекта 8, который находится вблизи транспортного средства. В одном варианте осуществления устройство наблюдения принимает форму зеркала заднего вида, установленного на внешней стороне транспортного средства для представления водителю отраженного изображения поверхности наблюдения зеркала. Изобретение также применимо в случае зеркала заднего вида, установленного в транспортном средстве. Предпочтительно поверхность наблюдения является полупрозрачной отражающей поверхностью.
В другом варианте осуществления устройство наблюдения принимает форму устройства визуального отображения (VDU), например, типа жидкокристаллического дисплея (LCD). Система предупреждения дополнительно содержит блок 10 обработки, выполненный с возможностью приема одного или более сигналов 12 датчиков, поступающих от одного или более датчиков, выполненных с возможностью измерения по меньшей мере скорости объекта или расстояния до него, например, грузового автомобиля, легкового автомобиля, автобуса или мотоцикла, вблизи транспортного средства. Датчики принимают, например, форму датчиков скорости, например радарных датчиков, и в одном варианте осуществления они представляют собой датчики, расположенные рядом с устройством наблюдения. Блок обработки выполнен также с возможностью приема сигнала, который представляет собой скорость V рассматриваемого транспортного средства.
Блок 10 обработки выполнен с возможностью вычисления разности Δv, которая представляет собой разность между соответствующими скоростями упомянутого объекта и рассматриваемым транспортным средством, сравнивая ее по меньшей мере с одним пороговым значением vt.
Система предупреждения содержит по меньшей мере одно средство 14 индикации, расположенное рядом с упомянутым устройством 4 наблюдения и выполненное с возможностью формирования по меньшей мере одного предупреждающего указания 16 для представления на поверхности 6 наблюдения устройства наблюдения или рядом с ним.
В одном варианте осуществления средство 14 индикации находится позади упомянутой поверхности 6 наблюдения, которая принимает форму полупрозрачной отражающей поверхности. Средство индикации принимает, например, форму LED или некоторого другого средства, формирующего свет, которое таким образом располагается позади поверхности наблюдения. Средство индикации размещается таким образом, чтобы любая желательная часть или части поверхности наблюдения можно было отметить путем активации средства индикации.
Предупреждающая индикация 16 формируется для идентификации упомянутого объекта в ответ на сигнал 18 индикации, который формируется упомянутым блоком 10 обработки в случае, если Δv превышает vt.
Индикация наблюдения предназначена для формирования тогда, когда транспортное средство, быстро приближающееся сзади, находится на полосе движения, которую рассматриваемое транспортное средство должно использовать во время операции обгона, чтобы водитель обратил особое внимание на транспортное средство, приближающееся сзади. Если идентифицированы два или более транспортных средств, которые движутся с высокой скоростью, две или более предупреждающих индикаций могут быть сформированы и отображаться на экране наблюдения.
Пороговое значение vt может представлять собой, например, предварительно определенную пропорцию скорости рассматриваемого транспортного средства или точно определенное значение. Если рассматриваемое транспортное средство движется 90 км/час и определено, что транспортное средство, приближающееся сзади, движется со скоростью на 10% быстрее, то сигнал индикации будет формироваться тогда, когда приближающееся транспортное средство движется быстрее, чем 99 км/час. Если разность Δv между тем определена на уровне 10 км/час, то сигнал индикации будет формироваться тогда, когда транспортное средство, приближающееся сзади, движется быстрее, чем 100 км/час. В качестве другой альтернативы, Δv зависит от скорости V рассматриваемого транспортного средства таким образом, что она уменьшается с увеличением скорости.
В одном варианте осуществления система 2 предупреждения выполнена с возможностью нахождения по меньшей мере в двух состояниях, то есть в основном состоянии и состоянии предупреждения. Это определяет блок 10 обработки на основании одного или более параметров 20, которые относятся к транспортному средству, при этом основное состояние устанавливается в случае, если отсутствует намерение сменить полосу движения, и состояние предупреждения в случае, если начинается смена полосы движения. Параметры, которые относятся к транспортному средству, содержат, например, состояние указателей поворота транспортного средства и/или близость транспортного средства к дорожной разметке полосы движения. Оповещение относительно близости транспортного средства к разметке полосы движения выполняется, например, посредством своей системы предупреждения при выезде за пределы полосы движения.
В другом варианте осуществления блок 10 обработки выполнен с возможностью дополнительного определения состояния системы предупреждения на основании одного или более параметров, которые относятся к транспортному средству, посредством чего переходное состояние устанавливается в случае, если обнаружено намерение сменить полосу движения, при этом при переходном состоянии основное состояние изменяется на состояние предупреждения.
В одном варианте осуществления изобретения характер предупреждающей индикации зависит от состояния системы предупреждения. Затем может возникнуть ряд различных ситуаций. Если обнаружено транспортное средство, приближающееся сзади, при Δv больше, чем vt, а система предупреждения находится в основном состоянии, то есть отсутствует намерение сменить полосу движения, которое обнаруживается путем отсутствия включения указателя поворота и/или путем нахождения транспортного средства на нормальных расстояниях от линии дорожной разметки, предупреждающая индикация не будет формироваться.
Наоборот, если транспортное средство, приближающееся сзади, обнаруживается при Δv больше, чем vt, и когда система предупреждения находится в состоянии предупреждения, то есть начинается перестроение на другую полосу движения, которое обнаруживается включением указателей поворота, и/или транспортное средство намеревается пересечь разметку полосы движения, будет формироваться предупреждающая индикация. Она может принимать форму красного прямоугольника вокруг транспортного средства, приближающегося сзади. Она может также изменяться динамическим образом, например, мигая все быстрее и быстрее, когда транспортное средство приближается все ближе и ближе.
Перед возникновением состояния предупреждения, система предупреждения может предпочтительно находиться в переходном состоянии, в котором было обнаружено намерение сменить полосу движения, например, с помощью транспортного средства, которое находится рядом с линией дорожной отметки. В этом состоянии предупреждающая индикация, например, формируется в форме желтого прямоугольника, окружающего транспортное средство, приближающееся сзади.
На Фиг. 1 предупреждающая индикация 16 изображена в виде пунктирного прямоугольника, но может иметь любую желательную геометрическую форму, подходящую для идентификации упомянутого объекта, например круг, квадрат или прямоугольник.
В одном варианте осуществления блок 10 обработки выполнен с возможностью наложения упомянутой предупреждающей индикация на изображение объекта таким образом, чтобы предупреждающая индикация окружала упомянутый объект. Это предпочтительно выполняют путем анализа изображения объекта для того, чтобы определить местоположение объекта на изображении. Это местоположение служит в качестве основы для идентификации того, где предупреждающая индикация должна располагаться таким образом, чтобы объект был окружен и четко обозначен.
Как упомянуто выше, предупреждающая индикация 16 выполнена с возможностью динамического изменения на основании упомянутой разности Δv и упомянутых параметров, которые относятся к транспортному средству как в отношении цвета и формы, так и представления, например, мигания.
В дополнительном варианте осуществления упомянутое средство 14 индикации находится на краю поверхности 6 наблюдения и выполнено с возможностью указания местоположения транспортного средства на соседней полосе движения. Затем можно применить средство индикации, например, в виде LED, которые можно разбить на две секции, то есть на верхнюю секцию, которая загорается в случае, если транспортное средство, приближающееся сзади, движется с высокой скоростью и находится на существенном расстоянии позади рассматриваемого транспортного средства, и на нижнюю секцию, которая загорается в случае, если транспортное средство, приближающееся быстро сзади, находится близко к рассматриваемому транспортному средству. В этом варианте осуществления средство индикации можно объединить, конечно, с предупреждающей индикацией, описанной выше, которая отображается на поверхности наблюдения и окружает транспортное средство, приближающееся сзади.
В еще одном варианте осуществления средство 14 индикации выполнено с возможностью указания того, когда транспортное средство, находящееся в соседней полосе движения, совершило обгон. Это включает в себя использование средства индикации, которое находится на краю устройства наблюдения, предпочтительно путем загорания нижней секции, когда транспортное средство совершило обгон, и существует пространство для рассматриваемого транспортного средства для движения по той же самой полосе, как и транспортное средство, совершившее обгон, и продолжает двигаться впереди него. Это является преимущественным в тех случаях, когда рассматриваемое транспортное средство является длинным, трудно оценить, когда завершается обгон. Этот случай включает в себя, например, использование радарных датчиков для оценки расстояния от транспортного средства, совершившего обгон, и так как длина рассматриваемого транспортного средства известна, загорается нижняя секция, когда расстояние от транспортного средства, совершившего обгон, больше, чем длина рассматриваемого транспортного средства.
На фиг. 2 показана схема дороги с двумя полосами движения, иллюстрирующая первый аспект настоящего изобретения. Рассматриваемое транспортное средство A находится позади транспортного средства B, которое движется медленнее, чем рассматриваемое транспортное средство. На соседней полосе движения транспортное средство C приближается сзади на более высокой скорости, чем транспортное средство A. Используя настоящее изобретение, водитель транспортного средства A будет воспринимать предупреждающую индикацию в случае, если он намеревается начать обгон. На фиг. 2 изображено устройство 4 наблюдения с датчиками, выполненными с возможностью измерения скорости транспортных средств на соседних полосах движения, как схематично иллюстрировано пунктирными линиями.
На фиг. 3 показана схема дороги с двумя полосами движения, иллюстрирующая второй аспект настоящего изобретения. В данной ситуации рассматриваемое транспортное средство А совершило обгон транспортного средства B и имеет намерение перейти на полосу движения впереди транспортного средства B. Предупреждающая индикация, которая загорается в нижней секции устройства 4 наблюдения, показывает водителю, что он может продолжать смену полосы движения. На фиг. 3 аналогичным образом изображено устройство наблюдения, в которое включены датчики для определения расстояния от транспортного средства на соседней полосе движения.
Настоящее изобретение не ограничено предпочтительными вариантами осуществления, описанными выше. Можно использовать прочие альтернативы, модификации и эквиваленты. Поэтому приведенные выше варианты осуществления не следует рассматривать как ограничивающие объем правовой охраны изобретения, который определен прилагаемой формулой изобретения.
Предложена система предупреждения для транспортного средства. Система содержит по меньшей мере одно устройство наблюдения с поверхностью наблюдения, выполненной с возможностью представления объектов, которые находятся вблизи транспортного средства. Блок обработки выполнен с возможностью приема одного или более сигналов датчиков, поступающих от одного или более датчиков. Датчики выполнены с возможностью измерения по меньшей мере скорости объекта вблизи транспортного средства. Блок обработки выполняет вычисление разности Δv, которая представляет собой разность между соответствующими скоростями упомянутого объекта и рассматриваемым транспортным средством, и сравнение разности Δv по меньшей мере с одним пороговым значением vt. Система предупреждения содержит по меньшей мере одно средство индикации, расположенное рядом с упомянутым устройством наблюдения. Средство индикации выполнено с возможностью формирования по меньшей мере одной предупреждающей индикации для представления на поверхности наблюдения устройства наблюдения или рядом с ней. Достигается создание системы предупреждения, которая устраняет недостатки существующих систем. 15 з.п. ф-лы, 3 ил.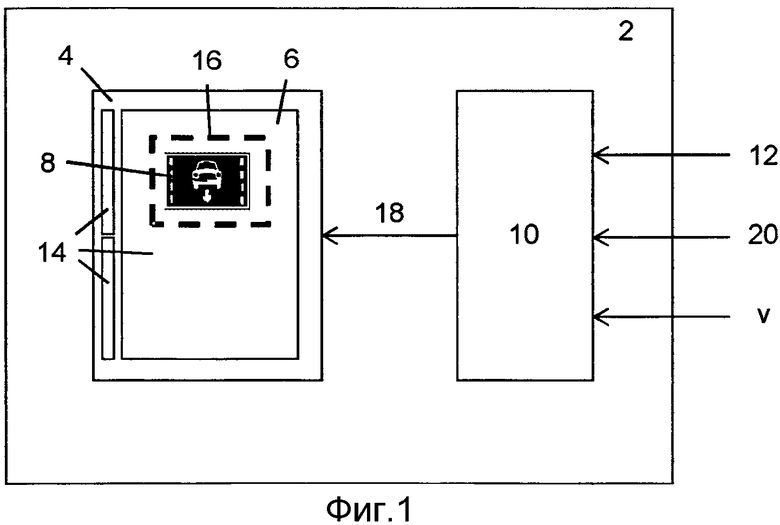
1. Система (2) предупреждения для транспортного средства, причем система содержит
по меньшей мере одно устройство (4) наблюдения с поверхностью (6) наблюдения, выполненное с возможностью представления объектов (8), которые находятся вблизи транспортного средства,
блок (10) обработки, выполненный с возможностью приема одного или более сигналов (12) датчиков от одного или более датчиков, которые выполнены с возможностью измерения по меньшей мере скорости объекта вблизи транспортного средства, вычисления разности Δv, которая представляет собой разность между соответствующими скоростями упомянутого объекта и рассматриваемого транспортного средства, и сравнения разности Δv по меньшей мере с одним пороговым значением vt,
отличающаяся тем, что
система предупреждения содержит по меньшей мере одно средство (14) индикации, расположенное рядом с упомянутым устройством (4) наблюдения и выполненное с возможностью формирования по меньшей мере одной предупреждающей индикации (16) для представления на поверхности (6) наблюдения устройства наблюдения или рядом с ней, причем предупреждающая индикация (16) идентифицирует упомянутый объект и выполнена с возможностью формирования в ответ на сигнал (18) отображения, формируемый упомянутым блоком (10) обработки в случае, если Δv превышает vt, причем средство (14) индикации дополнительно выполнено с возможностью индикации местоположения упомянутого объекта в соответствующих частях поверхности (6) наблюдения.
2. Система (2) предупреждения по п. 1, в которой блок (10) обработки дополнительно выполнен с возможностью определения состояния для системы предупреждения на основании одного или более параметров (20), которые относятся к транспортному средству, причем основное состояние устанавливается в случае, если отсутствует намерение сменить полосу движения, и состояние
предупреждения устанавливается в случае, если началась смена полосы движения.
3. Система предупреждения по п. 2, в которой блок (10) обработки дополнительно выполнен с возможностью определения дополнительного состояния для системы предупреждения на основании одного или более параметров (20), которые относятся к транспортному средству, причем переходное состояние устанавливается в случае, если обнаружено намерение сменить полосу движения, причем через переходное состояние основное состояние изменяется на состояние предупреждения.
4. Система предупреждения по п. 2 или 3, в которой характер индикации предупреждения зависит от состояния системы предупреждения.
5. Система предупреждения по п. 1, в которой упомянутое устройство наблюдения принимает форму по меньшей мере одного зеркала заднего вида.
6. Система предупреждения по п. 1, в которой упомянутые параметры (20), которые относятся к транспортному средству, содержат состояние указателей поворота транспортного средства и/или его близость к дорожной разметке для полос движения.
7. Система предупреждения по п. 1, в которой упомянутый объект представляет собой транспортное средство, приближающееся сзади на соседней полосе движения.
8. Система предупреждения по п. 1, в которой упомянутая предупреждающая индикация (16) принимает вид геометрической формы, выполненной с возможностью идентификации упомянутого объекта.
9. Система предупреждения по п. 8, в которой упомянутая геометрическая форма представляет собой прямоугольник.
10. Система предупреждения по п. 1, в которой упомянутый блок обработки выполнен с возможностью наложения упомянутой индикации (16) предупреждения на изображение объекта таким образом, что предупреждающая индикация окружает упомянутый объект.
11. Система предупреждения по п. 1, в которой предупреждающая индикация (16) выполнена с возможностью
динамического изменения на основании упомянутой разности Δv и упомянутых параметров, которые относятся к транспортному средству.
12. Система предупреждения по п. 1, в которой упомянутое средство (14) индикации находится сзади упомянутой поверхности (6) наблюдения, которая принимает форму полупрозрачной отражающей поверхности.
13. Система предупреждения по п. 1, в которой упомянутое средство (14) индикации размещено вдоль края поверхности (6) наблюдения и выполнено с возможностью индикации местоположения транспортного средства на соседней полосе движения.
14. Система предупреждения по п. 1, в которой упомянутое средство (14) индикации выполнено с возможностью индикации, когда был завершен обгон транспортного средства на соседней полосе движения.
15. Система предупреждения по п. 1, в которой упомянутое средство (14) индикации принимает форму светоизлучающих диодов (LED).
16. Система предупреждения по п. 1, в которой упомянутое устройство (4) наблюдения принимает форму устройства визуального отображения (VDU).
| JP 2008191781 A, 21.08.2008 | |||
| US 2009284361 A1, 19.11.2009 | |||
| ТЕЛЕМАТИЧЕСКАЯ СИСТЕМА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2207262C1 |

