Предлагаемое решение относится к способам улучшения обзора окружающей обстановки и наблюдательным устройствам транспортных средств (ТС), а именно к устройствам для улучшения обзора окружающей обстановки и помощи водителю при совершении маневра, и предназначено для установки и использования на легковых и грузовых автомобилях, а также автобусах.
Известна система зеркал заднего вида в автомобилях и других транспортных средствах (например, патент RU 2286267 C1, 09.11.2004), состоящая из внутрисалонного зеркала заднего вида (обычного, призматического, панорамного) и двух наружных боковых зеркал. Эта общепринятая система имеет ряд недостатков. Основной недостаток заключается в наличии у существующей системы эффекта «слепой зоны» - когда автомобиль, находящийся в соседнем ряду и чуть сзади, не виден ни в салонном, ни в боковом зеркалах заднего вида. Контроль такой «слепой зоны» крайне важен при перестроении ТС в потоке машин.
Для обеспечения безопасности движения, при прочих условиях, водителю необходима постоянная полная информация о быстро меняющейся окружающей обстановке не только позади его автомобиля, но и впереди с обеих сторон от движущейся машины.
Известны системы наружных видеокамер (например, патент RU 2096202 C1 от 26.08.96) или системы, использующие волоконную оптику, переносящую информацию на лобовое стекло, однако эти дорогостоящие и легко повреждаемые системы пока не нашли широкого применения ввиду неработоспособности при загрязнении оптических элементов.
Известны патенты, в которых изображение с наружного бокового зеркала переносится в кабину водителя, приближая изображение бокового пространства к водителю (например, патент RU 2127201 C1, 03.04.95). В этих патентах наружное боковое зеркало превращается в сложное оптическое устройство с применением комбинаций линз и призматических устройств. Существенным недостатком является необходимость устанавливать наружные боковые зеркала под острым углом к продольной оси машины. При таком положении зеркал значительно уменьшается зона бокового обзора.
Наиболее близким техническим решением к предлагаемому устройству является «Система контроля «мертвой зоны» боковых зеркал автомобиля» (Патент RU №96822, B60R 1/02, 20.04.10), состоящая из ультразвуковых датчиков, располагаемых на заднем бампере автомобиля, состояние которых опрашивается вычислительным ядром системы. Недостаток устройства - невозможность контроля состояния «слепой зоны» движущегося впереди ТС.
Задача, решаемая предлагаемым изобретением - информирование водителя о нахождении его ТС в области «слепой зоны» боковых зеркал едущего впереди автомобиля с целью помощи этому водителю при управлении им ТС.
Технический результат заключается в автоматическом контроле состояния «слепой зоны» движущегося впереди ТС и в помощи водителю при перестроениях этого ТС, который достигается за счет того, что водителю выдаются предупреждающие сигналы: если в просматриваемой системой «слепой зоне» обнаруживается ТС, то система оповещает водителя посредством индикаторов.
Поставленная задача решается применением ультразвуковых датчиков, располагаемых на переднем бампере ТС, а также видеокамеры, состояние которых опрашивается вычислительным ядром системы, что позволяет не только автоматически контролировать состояние «слепой зоны» движущегося впереди ТС даже в условиях плохой видимости, но и оказывать активное содействие водителю в процессе управления им ТС.
Поскольку каждая модель автомобиля имеет свои конструктивные особенности, в частности габаритные размеры, и заранее неизвестно, в «слепую зону» какого ТС (легкового автомобиля, грузового автомобиля или автобуса) может попасть автомобиль, то не представляется возможным заранее определить параметры этой «слепой зоны». Таким образом, возникает необходимость контроля не только расстояния до впереди идущего ТС, но и определения габаритных параметров этого ТС.
Использование видеокамер в системах контроля объектов позволяет не только наблюдать за обстановкой вокруг ТС, но и определять тип и размеры обгоняемых ТС. Значительную проблему при использовании видеокамер представляет определение расстояния до ТС. В разработанной системе данный вопрос решается путем применения измерителей расстояния, описанных выше.
Изобретение иллюстрируется следующими фигурами:
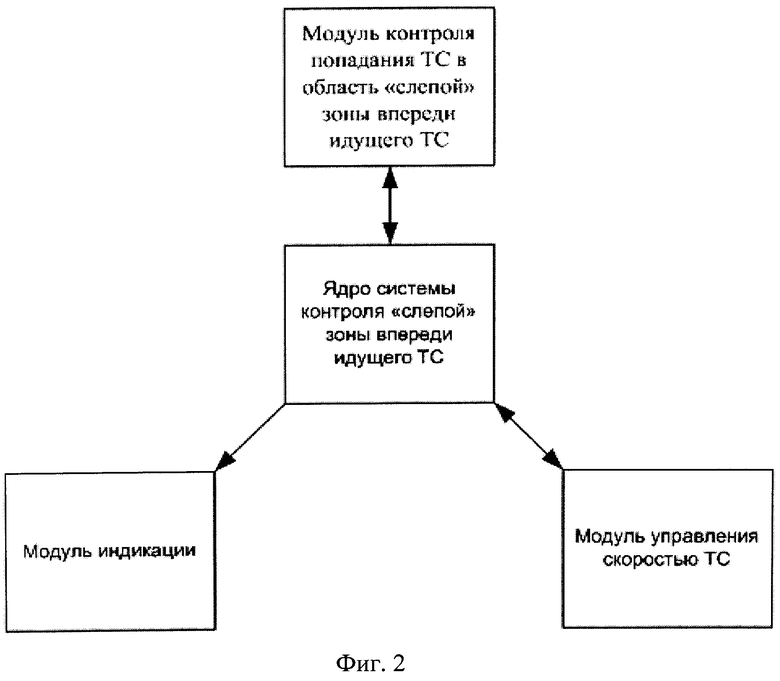
на фиг.1 схематично показан принцип работы предлагаемой системы контроля «слепой зоны» впереди идущего ТС;
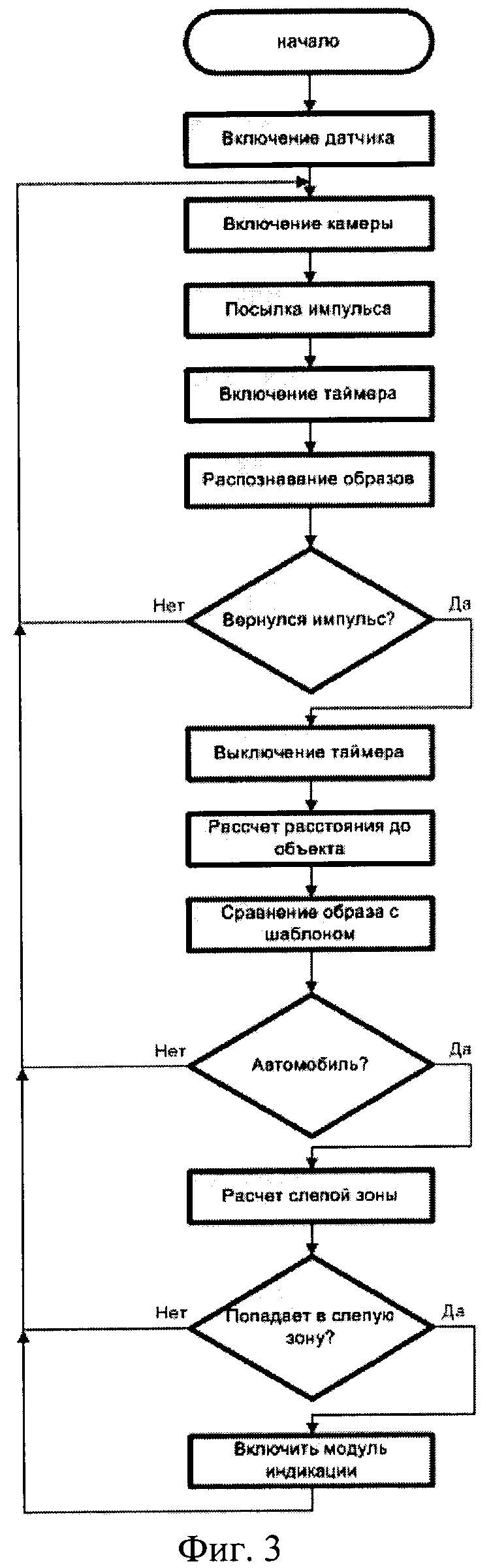
на фиг.2 представлена структура системы контроля «слепой зоны» впереди идущего ТС;
на фиг.3 приведен упрощенный алгоритм работы системы контроля «слепой зоны».
Структуру системы контроля «слепой зоны» можно представить в виде одного вычислительного модуля - ядра системы, в качестве которого выступает микроконтроллер, и 2-х либо 3-х (в зависимости от варианта исполнения) взаимодействующих с ним рабочих модулей (фиг.2):
- модуль контроля попадания ТС в область «слепой зоны» впереди идущего ТС;
- модуль световой индикации;
- дополнительный модуль управления скоростью ТС.
Само ядро системы контроля «слепой зоны» представляет собой простое схемное решение, в центре которого находится микроконтроллер. Данная схема располагается в небольшом пластиковом корпусе (140×110×35 мм), который может быть расположен, например, под панелью приборов ТС, либо в его подкапотном пространстве.
Модуль контроля ТС в области «слепой зоны» состоит из двух либо четырех (в зависимости от варианта исполнения) ультразвуковых датчиков, располагаемых на переднем бампере, и видеокамеры. Два датчика устанавливаются под углом около 30° к продольной оси ТС, два дополнительных датчика устанавливаются по направлению движения ТС и контролируют перестроение впереди идущего ТС. Информация с датчиков поступает в микроконтроллер. Для изображения, получаемого с видеокамеры, применяется метод распознавания образов. Распознавание в системе основывается на методе перебора, т.е. производится сравнение с базой данных, где для каждого вида объектов представлены всевозможные модификации отображения. Если образ при сравнении с элементами базы данных окажется ТС, система начнет расчет, попадает ли оснащенный предлагаемой системой ТС в данную «слепую зону» движущегося впереди ТС. В случае попадания система предупреждает об опасном сближении с помощью индикаторов, расположенных на панели приборов.
Модуль световой индикации состоит из двух светодиодов, располагаемых на приборной панели ТС. Когда ТС попадает в «слепую зону», сигнал с датчиков поступает в микроконтроллер, который анализирует расстояние до этого ТС и информирует посредством светодиодных индикаторов о попадании его ТС в «слепую зону» ТС, движущегося по соседней полосе и немного впереди. Тем самым водитель узнает, что его ТС попало в «слепую зону» другого ТС. Система не реагирует на припаркованные ТС, дорожные ограждения, столбы и другие неподвижные предметы, что позволяет избежать ложных срабатываний. Сама система активируется на скорости свыше 10 км/ч.
Применение подобной конструкции системы контроля «слепой зоны» позволяет значительно снизить вероятность возникновения дорожно-транспортного происшествия при сравнительно небольшой себестоимости самой системы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАБЛЮДЕНИЯ ЗА ДОРОЖНОЙ СИТУАЦИЕЙ С ДВИЖУЩЕГОСЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2010 |
|
RU2432276C1 |
| БЕСПИЛОТНОЕ ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ ЕГО ДВИЖЕНИЕМ | 2022 |
|
RU2809334C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОТСЛЕЖИВАНИЯ ОБЪЕКТОВ | 2022 |
|
RU2814813C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ОБЪЕКТОВ | 2022 |
|
RU2806452C1 |
| Способ помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831037C1 |
| Система помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831762C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| СИСТЕМА ПОМОЩИ ВОДИТЕЛЮ | 2022 |
|
RU2793009C1 |
| УСТРОЙСТВО ЗАЩИТЫ АВТОМОБИЛЯ ПРИ СТОЛКНОВЕНИИ (ВАРИАНТЫ) | 2014 |
|
RU2600174C2 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ О СТОЛКНОВЕНИИ | 2019 |
|
RU2724044C1 |
Группа изобретений относится к наблюдательным устройствам транспортных средств, а именно к способу контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля. Согласно первому варианту способ включает определение наличия движущегося впереди по соседней полосе в попутном направлении транспортного средства с помощью видеокамеры, измерение расстояния до транспортного средства с расчетом положения «слепой зоны» его боковых зеркал и положения заднего транспортного средства относительно «слепой зоны», а также определение его типа и размеров, предупреждение об опасном сближении с помощью индикаторов, располагающихся на панели приборов, содействие в процессе управления транспортным средством путем снижения скорости автомобиля в случае, если водитель транспортного средства, движущегося впереди по соседней полосе, начинает выполнять опасный маневр. Согласно второму варианту система контроля включает видеокамеру, ультразвуковые датчики и микроконтроллер. Ультразвуковые датчики, расположенные на переднем бампере автомобиля, определяют положение «слепой зоны» боковых зеркал движущегося впереди транспортного средства. Микроконтроллер выдает предупреждающие сигналы водителю о попадании транспортного средства в область «слепой зоны» впереди идущего транспортного средства. Достигается повышение безопасности дорожного движения за счет автоматического контроля состояния «слепой зоны» движущегося впереди транспортного средства. 2 н. и 5 з.п. ф-лы, 3 ил.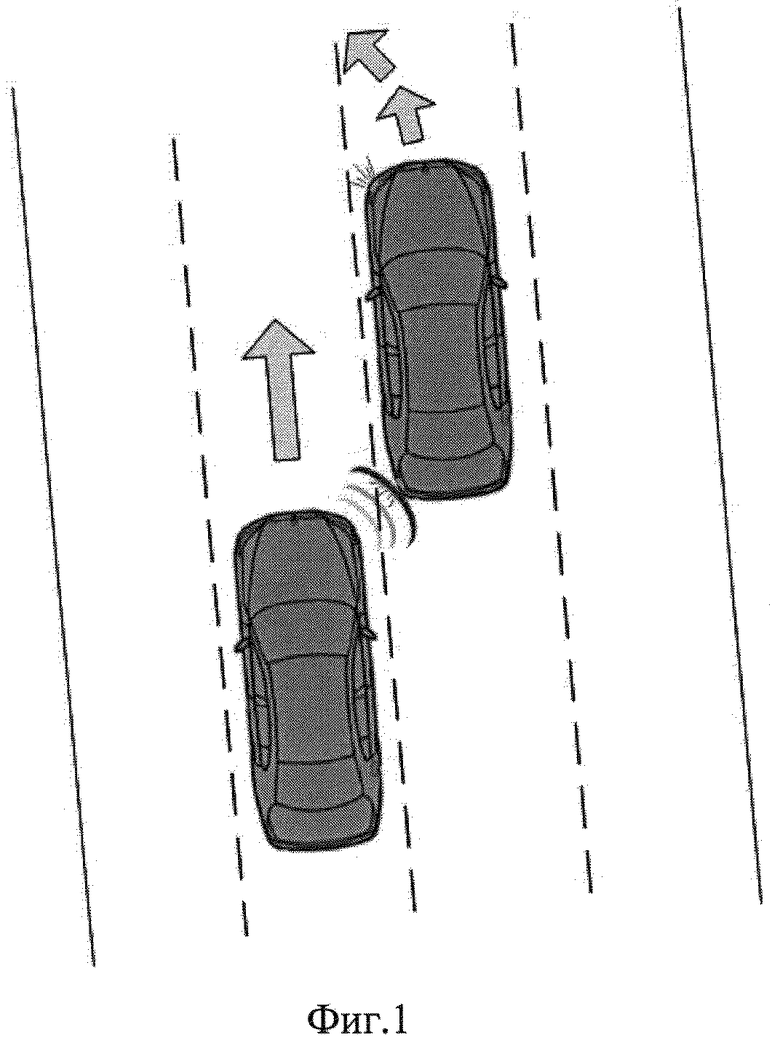
1. Способ контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля, включающий определение наличия движущегося впереди по соседней полосе в попутном направлении транспортного средства с помощью видеокамеры, измерение расстояния до транспортного средства с расчетом положения «слепой зоны» его боковых зеркал и положения заднего транспортного средства относительно «слепой зоны», а также определение его типа и размеров, предупреждение об опасном сближении с помощью индикаторов, располагающихся на панели приборов, содействие в процессе управления транспортным средством путем снижения скорости автомобиля в случае, если водитель ТС, движущегося впереди по соседней полосе, начинает выполнять опасный маневр.
2. Система контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля, включающая ультразвуковые датчики, состояние которых опрашивается вычислительным ядром системы, отличающаяся тем, что система содержит видеокамеру и ультразвуковые датчики, располагающиеся на переднем бампере автомобиля, состояние которых опрашивается вычислительным ядром системы, состоящим из ядра системы, в качестве которого выступает микроконтроллер, который выдает предупреждающие сигналы водителю, модуля контроля попадания транспортного средства в область «слепой зоны» впереди идущего транспортного средства и модуля световой индикации, состоящего из двух светодиодов, располагаемых на приборной панели транспортного средства.
3. Система контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля по п.2, отличающаяся тем, что для контроля состояния «слепой зоны» используются два ультразвуковых датчика, устанавливаемых на переднем бампере автомобиля под углом около 30° к продольной оси транспортного средства.
4. Система контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля по п.2, отличающаяся тем, что для контроля состояния «слепой зоны» используются четыре ультразвуковых датчика, устанавливаемые на переднем бампере автомобиля, при этом два из них располагаются под углом около 30° к продольной оси транспортного средства, а два других устанавливаются по направлению движения транспортного средства и контролируют перестроение впереди идущего транспортного средства.
5. Система контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля по п.2, отличающаяся тем, что вычислительное ядро системы дополнительно содержит модуль управления скоростью ТС.
6. Система контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля по п.2, отличающаяся тем, что вычислительное ядро системы представляет собой схему, в центре которой находится микроконтроллер, располагающуюся в небольшом пластиковом корпусе размером 140×110×35 мм, которая может устанавливаться либо под панелью приборов транспортного средства, либо в его подкапотном пространстве.
7. Система контроля «слепой зоны» боковых зеркал движущегося впереди автомобиля по любому из пп.2-6, отличающаяся тем, что в случае, если водитель транспортного средства, движущегося впереди по соседней полосе, начинает выполнять опасный маневр, система немного снижает скорость транспортного средства.
| US 2011251768 A1, 13.10.2011 | |||
| КРЕПЕЖНЫЙ УЗЕЛ ВЫДВИЖНОГО ЯЩИКА | 2007 |
|
RU2423901C2 |
| НОВЫЕ ПОВЕРХНОСТНО-АКТИВНЫЕ ВЕЩЕСТВА И ИХ ПРИМЕНЕНИЕ | 2004 |
|
RU2395493C2 |
| US 7613568 B2, 03.11.2009 | |||
| DE 3322528 A1, 10.01.1985 | |||

