ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к системе предупреждения согласно родовому понятию независимого пункта формулы изобретения. Изобретение относится, в частности, к системе предупреждения, выполненной с возможностью упрощения водителям выполнения обгона.
Настоящее изобретение относится, в частности, к системе индикации, выполненной с возможностью предпочтительно постоянно информировать водителя грузового транспортного средства при обгоне другого транспортного средства относительно того, когда обгон был завершен, для безопасного возвращения на полосу движения впереди обогнанного транспортного средства.
УРОВЕНЬ ТЕХНИКИ
Сейчас обычным для водителей грузовиков является оказание содействия обгону водителем обгоняемого транспортного средства, мигая фарами в качестве сигнала обгоняющему транспортному средству, когда для него имеется пространство, чтобы вернуться на полосу движения впереди обгоняемого транспортного средства.
Обгон одним грузовиком другого может занимать относительно длительное время среди прочего ввиду того, что транспортные средства могут быть длинными и тяжелонагруженными. Важно, что обгоняющее транспортное средство не должно оставаться слишком долго на полосе обгона, поскольку оно будет блокировать другое дорожное движение в течение излишне длительного времени. Как упомянуто выше, водители грузовиков часто помогают друг другу для облегчения обгона, но не все из них делают это. Также существует проблема, когда грузовики обгоняют другие транспортные средства, водители которых не привыкли сигнализировать, когда обгон был завершен.
В настоящее время для легковых автомобилей и грузовиков существуют системы, выполненные с возможностью отслеживания полос движения с одной или обеих сторон транспортного средства, чтобы проверять, имеются ли какие-либо транспортные средства вдоль борта рассматриваемого транспортного средства, например, под углами «мертвой зоны». Эти системы указывают водителю, имеется ли транспортное средство на какой-либо соседней полосе движения, формируя некоторую форму визуального предупреждения близко к зеркалу заднего вида или на передней стойке, т.е. части кузова транспортного средства, которая находится перед передними дверьми, служит в качестве опоры крыши и к сторонам которой прикреплено ветровое стекло. Предупреждение может также принимать форму звукового предупреждения, которое может быть объединено с визуальным предупреждением. Если водитель начинает двигаться на полосу, на которой уже находится транспортное средство, предупреждение будет нарастать.
Патентные документы, на которые ниже приведена ссылка, являются примерами систем, выполненных с возможностью указания и предупреждения водителей об объектах в окружении их транспортных средств.
US-2010/0020170 относится к системе обработки изображений для транспортного средства, которая выполнена с возможностью, среди прочего, идентифицировать объект сзади или вдоль борта рассматриваемого транспортного средства и затем представлять в зеркале заднего вида или близко к нему выделенную версию объекта. Это может быть выполнено, например, посредством формирования картинки, которая накладывается на зеркало, чтобы более ясно представлять объект водителю.
EP-2073185 относится к способу и устройству для формирования и представления предупреждающих сигналов, если объект обнаружен снаружи транспортного средства, например может быть обнаружена скорость объекта. Предупреждения представляются, например, близко к передней стойке транспортного средства.
US-7079017 относится к системе предупреждения для моторных транспортных средств. Система содержит датчик для обнаружения препятствия рядом с транспортным средством, устройство для формирования сигнала в ответ на обнаруженное препятствие и устройство индикации, которое формирует предупреждение для водителя. Система предупреждения, в частности, выполнена с возможностью побуждать водителя направить внимание в сторону, где находится препятствие. Это выполняется, например, посредством размещения светодиодов (LED) близко к зеркалам заднего вида и вызова их мигания, если внимание водителя должно быть привлечено к препятствиям, которые видны в конкретном зеркале заднего вида.
US-2009/0063053 относится к способу и системе для идентификации углов «мертвой зоны» и выдачи предупреждений посредством визуальных индикаторов, например через LED или экраны. Визуальные индикаторы определяются, например, на основании относительной скорости транспортного средства, приближающегося сзади, относительно скорости рассматриваемого транспортного средства.
DE-102008003936 относится к устройству, выполненному с возможностью представления на зеркале заднего вида грузового транспортного средства предупреждающих сообщений, которые обеспечивают, среди прочего, индикацию относительной скорости между рассматриваемым транспортным средством и близким транспортным средством.
В случае грузовиков недостаточно знать, что вдоль борта рассматриваемого транспортного средства имеется транспортное средство, поскольку последнее может быть очень длинным. Поэтому также важно знать местоположение в продольном направлении транспортного средства на соседней полосе движения относительно рассматриваемого транспортного средства. Существуют решения, которые устраняют эту проблему посредством установки вокруг грузовика множества зеркал, числом до семи. Это означает при желании, чтобы убедиться, что транспортное средство может продолжать двигаться безопасно, водитель должен взглянуть во все зеркала, отвлекая внимание от других бортовых систем, с вытекающей отсюда возможностью отрицательного влияния на управление транспортным средством.
Таким образом, существует необходимость упрощения для водителя отслеживания окружения рассматриваемого транспортного средства при изменении полос движения без еще большего увеличения сложности условий работы водителя.
Задача настоящего изобретения состоит в создании системы предупреждения, которая устраняет недостатки существующих систем.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Вышеописанные задачи решаются изобретением, определенным независимыми пунктами формулы изобретения.
Предпочтительные варианты осуществления определяются зависимыми пунктами формулы изобретения.
Система согласно изобретению выполнена с возможностью отслеживания полосы движения, ближайшей к рассматриваемому транспортному средству, а также формирования указания, которое выражает местоположение транспортного средства на соседней полосе и указывает, когда вдоль борта рассматриваемого транспортного средства не имеется транспортное средство, т.е. когда полоса не занята.
Длина рассматриваемого транспортного средства известна системе предупреждения согласно изобретению. Когда вдоль борта рассматриваемого транспортного средства находится транспортное средство, т.е. вдоль борта рассматриваемого транспортного средства и какого-либо прицепа, согласно изобретению водитель транспортного средства будет информирован об этом.
Один вариант осуществления относится к индикации обгона на боковых зеркалах заднего вида транспортного средства или близко к ним.
Например, транспортное средство представляется в зеркале или посредством схематичной индикации на зеркале заднего вида или близко к нему.
Когда обгоняемое транспортное средство пройдено и имеется пространство, чтобы рассматриваемое транспортное средство переместилось на полосу движения впереди обгоняемого транспортного средства, предупреждающая индикация изменяется таким образом, что водитель принимает ясную информацию о том, что можно безопасно перейти на полосу впереди обгоняемого транспортного средства.
Индикация обгона может быть обеспечена множеством различных способов.
Она может, например, быть обеспечена посредством обведения кругом изображения обгоняемого транспортного средства, в зеркале заднего вида на протяжении всего периода обгона. Она может также быть отображена в отдельной части устройства визуального наблюдения, например в верхней части поверхности визуального наблюдения.
Когда транспортное средство было обогнано, индикация обгона больше не отображается, тем самым указывая водителю, что можно безопасно возвращаться впереди обогнанного транспортного средства.
В другом варианте осуществления свойство индикации обгона изменяется, когда можно безопасно возвращаться, например красная индикация может изменяться на зеленую индикацию.
В одном варианте осуществления, когда можно безопасно возвращаться, индикация обгона формируется в форме одной или более мигающих ламп на поверхности визуального наблюдения или близко к ней, которая похожа на мигание фарами, иногда используемое сегодняшними водителями для указания, что обгоняющее транспортное средство может теперь возвращаться на полосу впереди.
В другом варианте осуществления система предупреждения выполнена с возможностью измерения скорости обгоняемого транспортного средства. Если измерение показывает, что транспортное средство ускоряется, индикация того, что можно безопасно возвращаться впереди него, не выдается.
В одном варианте осуществления предупреждающая индикация будет лишь указывать, что обгон разрешен, т.е. что можно безопасно возвращаться на полосу впереди обгоняемого транспортного средства, если разность между скоростью рассматриваемого транспортного средства и скоростью обгоняемого транспортного средства равна нулю или больше нуля. Другими словами, обгон может быть разрешен, только если скорость рассматриваемого транспортного средства равна или больше скорости обгоняемого транспортного средства.
Система предупреждения согласно настоящему изобретению имеет множество преимуществ.
Во-первых, водитель будет принимать индикацию, когда можно безопасно возвращаться на полосу движения после операции обгона независимо от типа обгоняемого транспортного средства.
Во-вторых, система предупреждения в одном варианте осуществления будет указывать на разрешенный обгон, только когда имеется пространство для возвращения на полосу движения, если обгоняемое транспортное средство движется с той же скоростью или более медленно, чем рассматриваемое транспортное средство.
В-третьих, водитель будет принимать достоверную индикацию, когда обгон разрешен и когда можно возвращаться на полосу движения. В настоящее время не все водители мигают, когда они были обогнаны, или они мигают в неподходящее время.
В-четвертых, система предупреждения согласно настоящему изобретению подразумевает, что водитель, который был обогнан, больше не должен мигать каждому обгоняющему транспортному средству.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
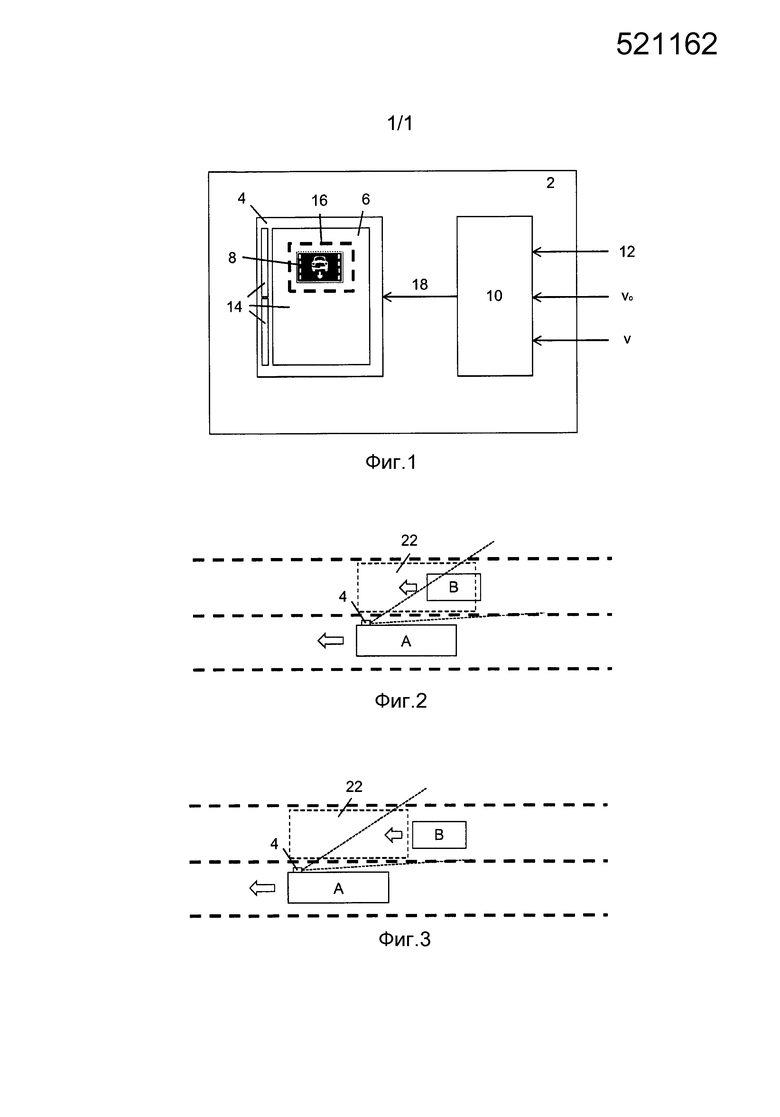
Фиг. 1 - блок-схема, иллюстрирующая несколько вариантов осуществления настоящего изобретения.
Фиг. 2 и 3 - схематичные изображения дороги с двумя полосами движения, иллюстрирующие настоящее изобретение.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
Теперь изобретение будет подробно описано со ссылкой на блок-схему на фиг. 1. Таким образом, оно относится к системе 2 предупреждения для транспортного средства, например грузовика, автобуса или автомобиля. Система содержит по меньшей мере одно устройство 4 визуального наблюдения с поверхностью 6 визуального наблюдения, выполненной с возможностью представления объектов 8, которые находятся поблизости от транспортного средства. Устройство визуального наблюдения принимает в одном варианте осуществления форму зеркала заднего вида, установленного снаружи транспортного средства, чтобы обеспечивать водителя отраженным изображением поверхности визуального наблюдения зеркала. Изобретение также применимо в случае зеркала заднего вида, установленного в транспортном средстве. Поверхность визуального наблюдения предпочтительно является полупрозрачной отражающей поверхностью. В другом варианте осуществления устройство визуального наблюдения принимает форму устройства визуального отображения (VDU), например, типа жидкокристаллического индикатора (LCD).
Система предупреждения дополнительно содержит блок 10 обработки, выполненный с возможностью приема одного или более сигналов 12 датчиков от одного или более датчиков, выполненных с возможностью измерения одного или более заданных параметров объектов поблизости от транспортного средства и использовать упомянутые параметры в качестве основы для определения того, находится ли объект в заданной зоне 22 обгона (см. фиг. 2 и 3).
Датчики принимают, например, форму датчика скорости, например радиолокационные датчики, и в одном варианте осуществления они находятся близко к устройству визуального наблюдения. Сигнал скорости для объекта поблизости от транспортного средства представляется как v0 на чертеже. Датчики содержат в одном варианте осуществления датчики, выполненные с возможностью измерения расстояния от объектов поблизости от транспортного средства, и принимают, например, форму радиолокационных датчиков, емкостных датчиков или других подходящих датчиков. Блок 10 обработки также выполнен с возможностью принимать сигнал, который представляет скорость v рассматриваемого транспортного средства.
Система предупреждения содержит по меньшей мере одно средство 14 индикации, находящееся близко к упомянутому устройству 4 визуального наблюдения и выполненное с возможностью формирования по меньшей мере одной предупреждающей индикации 16 для представления на поверхности 6 визуального наблюдения устройства визуального наблюдения или близко к ней на основании сигнала 18 отображения, сформированного упомянутым блоком 10 обработки. Средство 14 индикации в одном варианте осуществления находится позади упомянутой поверхности визуального наблюдения, которая тогда принимает форму полупрозрачной отражающей поверхности. Средство индикации принимает, например, форму LED или некоторого другого формирующего свет средства, которое, таким образом, находится позади поверхности визуального наблюдения. Средство индикации размещается таким образом, что любая желаемая часть или части поверхности визуального наблюдения могут быть отмечены посредством приведения в действие средства индикации. Система предупреждения выполнена с возможностью пребывания в любом из двух состояний обгона, а именно в первом состоянии, которое применяется, когда по меньшей мере один объект 8 находится в зоне обгона, и во втором состоянии, которое применяется, когда не имеются объекты в зоне обгона, и индикация 16 обгона выполнена с возможностью изменения на основании того, что применяется любое из состояний обгона.
В одном варианте осуществления индикация обгона выполнена с возможностью обеспечивать первую индикацию, когда применяется первое состояние, и вторую индикацию, когда применяется второе состояние.
Первая индикация содержит, например, красную метку в части поверхности визуального наблюдения, например в верхней части поверхности. Вторая индикация содержит, например, зеленую метку в верхней части поверхности визуального наблюдения, т.е. красная метка заменяется зеленой меткой, когда больше не имеется каких-либо объектов в зоне обгона.
В другом варианте осуществления средство индикации выполнено с возможностью формирования одного или более оптических сигналов, например, в форме мигающих ламп, когда первое состояние изменяется на второе состояние в ответ на сигнал 18 отображения. Это похоже на мигание фар, которое иногда поступает от обгоняемого транспортного средства.
Заданная зона 22 обгона (см. фиг. 2 и 3) определяется как область на соседней полосе движения, которая относится к размеру рассматриваемого транспортного средства. Длина зоны обгона предпочтительно равна длине рассматриваемого транспортного средства плюс заданный безопасный интервал. Заданный безопасный интервал, например, равен порядка 5-10 метров и может, например, быть определен на основе скорости рассматриваемого транспортного средства и скорости обгоняемого транспортного средства таким образом, что чем выше их скорости, тем больше интервал безопасности. Ширина зоны безопасности предпочтительно практически соответствует ширине полосы движения. Фиг. 2 и 3 изображают зону 22 обгона как прямоугольник на соседней полосе. Это должно рассматриваться как схематичная иллюстрация того, что достигается посредством применения изобретения, а именно наблюдения области в окрестностях рассматриваемого транспортного средства, чтобы облегчать обгон. В применениях изобретения зона обгона содержит ряд секторов обгона, наблюдаемых посредством датчиков, чтобы надежно охватывать всю зону обгона.
В одном варианте осуществления один из параметров относится к скорости упомянутого объекта v0, т.е. обгоняемого транспортного средства, которую блок обработки выполнен с возможностью сравнивать со скоростью v рассматриваемого транспортного средства посредством определения Δv=v-v0. В этом варианте осуществления второе состояние применяется, если не имеются объекты в упомянутой зоне обгона, и Δv равно или больше нуля. Это значит, что индикация обгона не будет указывать, что обгон был завершен и что имеется пространство, чтобы перейти назад на полосу движения впереди обгоняемого транспортного средства, если обгоняемое транспортное средство движется быстрее рассматриваемого транспортного средства. В разновидности этого варианта осуществления блок обработки также выполнен с возможностью вычислять ускорение обгоняемого транспортного средства. Если обгоняемое транспортное средство представляет ускорение большее, чем ускорение рассматриваемого транспортного средства, индикация обгона не будет указывать, что обгон был завершен.
На фиг. 1 индикация 16 обгона изображена в виде прямоугольника с прерывистой линией, но может иметь любую желаемую геометрическую форму, подходящую, чтобы идентифицировать упомянутый объект, например, кругом, квадратом или прямоугольником.
В одном варианте осуществления блок 10 обработки выполнен с возможностью наложения упомянутой индикации обгона на изображение объекта, так что индикация обгона окружает упомянутый объект. Это предпочтительно выполняется посредством анализа изображения объекта для определения местоположения объекта на изображении. Это местоположение служит в качестве основания для определения того, где должна быть расположена индикация обгона, так что объект обводится кругом и ясно указывается.
Индикация 16 обгона в одном варианте осуществления выполнена с возможностью динамически изменяться на основании любого состояния обгона, в котором находится система предупреждения, что касается цвета, формы и представления, например мигания.
В дополнительном варианте осуществления упомянутое средство 14 индикации находится вдоль края поверхности 6 визуального наблюдения и выполнено с возможностью указания местоположения транспортного средства на соседней полосе движения. Тогда средство индикации, например, принимает форму светодиодов (LED), которые могут быть сгруппированы в две секции, а именно верхнюю секцию и нижнюю секцию.
Согласно изобретению средство 14 индикации, таким образом, выполнено с возможностью указания, когда транспортное средство на соседней полосе движения было обогнано. Это подразумевает использование средства индикации, которое находится на краю устройства визуального наблюдения, предпочтительно в нижней секции, зажигающейся, когда транспортное средство было обогнано, и имеется пространство для того, чтобы рассматриваемое транспортное средство переместилось на ту же полосу, что и обгоняемое транспортное средство, и ехало впереди него. Это полезно, когда рассматриваемое транспортное средство является длинным, и трудно определять, когда обгон был завершен. Этот случай подразумевает, например, использование радиолокационных датчиков, чтобы определять расстояние от обгоняемого транспортного средства, и поскольку длина рассматриваемого транспортного средства известна, нижняя секция зажигается, когда расстояние от обгоняемого транспортного средства больше длины рассматриваемого транспортного средства.
В качестве альтернативы нижняя секция может освещаться, когда транспортное средство находится вдоль борта рассматриваемого транспортного средства, и когда транспортное средство было обогнано, нижняя секция может быть погашена, а верхняя секция освещена, когда имеется пространство для перемещения назад впереди обогнанного транспортного средства.
Фиг. 2 и 3 - это схематичные изображения дороги с двумя полосами движения, иллюстрирующие настоящее изобретение.
Они показывают устройство 4 визуального наблюдения с датчиками, выполненными с возможностью измерения параметров, например скорости, связанных с транспортными средствами на соседних полосах движения, как схематично проиллюстрировано пунктирными линиями.
Рассматриваемое транспортное средство A обгоняет транспортное средство B, которое на фиг. 2 находится в зоне 22 обгона, т.е. система предупреждения находится в первом состоянии, которое указывается для водителя посредством представления первой индикации.
На фиг. 3 рассматриваемое транспортное средство обогнало транспортное средство B, которое больше не находится в зоне 22 обгона. Состояние обгона системы предупреждения здесь изменилось на второе состояние, которое указывается для водителя посредством представления второй индикации.
Настоящее изобретение не ограничено предпочтительными вариантами осуществления, описанными выше. Могут быть использованы различные альтернативы, модификации и эквиваленты. Вышеописанные варианты осуществления, следовательно, не рассматриваются как ограничивающие объем правовой охраны изобретения, который определяется прилагаемой формулой изобретения.
Изобретение относится к системе предупреждения для грузового транспортного средства и касается постоянного информирования водителя при обгоне. Система содержит устройство визуального наблюдения с поверхностью визуального наблюдения, выполненной с возможностью представления объектов, которые находятся поблизости от транспортного средства, блок обработки. Система также содержит средство индикации, выполненное с возможностью формирования индикации обгона. При этом блок обработки выполнен с возможностью наложения индикации обгона на изображение объекта, представляемое на поверхности визуального наблюдения, таким образом, что индикация обгона окружает изображение объекта, когда имеется объект в зоне обгона. Достигается обеспечение простой и безопасной системы обгона для грузового транспортного средства. 9 з.п. ф-лы, 3 ил.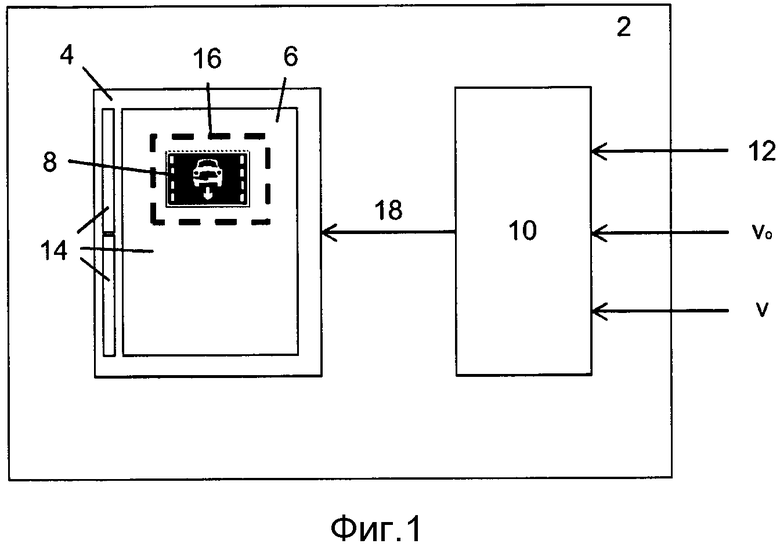
1. Система (2) предупреждения для транспортного средства, при этом система содержит:
по меньшей мере одно устройство (4) визуального наблюдения с поверхностью (6) визуального наблюдения, выполненной с возможностью представления объектов (8), которые находятся поблизости от транспортного средства,
блок (10) обработки, выполненный с возможностью приема одного или более сигналов (12) датчиков от одного или более датчиков, которые выполнены с возможностью измерения одного или более заданных параметров объектов поблизости от транспортного средства и использования упомянутых параметров в качестве основания для определения того, имеется ли объект в заданной зоне (22) обгона,
отличающаяся тем, что
система предупреждения содержит по меньшей мере одно средство (14) индикации, расположенное близко к упомянутому устройству (4) визуального наблюдения и выполненное с возможностью формирования по меньшей мере одной индикации (16) обгона для представления на поверхности (6) визуального наблюдения устройства визуального наблюдения или близко к ней, и средство (14) индикации выполнено с возможностью указания местоположения упомянутого объекта в соответствующих частях поверхности (6) визуального наблюдения в ответ на сигнал (18) отображения, сформированный упомянутым блоком (10) обработки, тем, что система предупреждения выполнена с возможностью пребывания в любом из двух состояний обгона, содержащих первое состояние и второе состояние, таким образом, что первое состояние применяется, когда имеется по меньшей мере один объект (8) в упомянутой зоне (22) обгона, а второе состояние применяется, когда не имеются объекты в упомянутой зоне (22) обгона, тем, что упомянутая индикация (16) обгона выполнена с возможностью изменения на основании упомянутых состояний обгона, тем, что один из упомянутых параметров относится к скорости упомянутого объекта v0, и блок (10) обработки выполнен с возможностью сравнения этой скорости со скоростью v транспортного средства путем определения Δv=v-v0, и тем, что упомянутое второе состояние применяется, если не имеются объекты в упомянутой зоне (22) обгона и Δv больше или равно нулю, и при этом упомянутый блок обработки выполнен с возможностью наложения упомянутой индикации (16) обгона на изображение объекта, представляемое на поверхности (6) визуального наблюдения, таким образом, что индикация обгона окружает упомянутое изображение объекта, когда применяется упомянутое первое состояние.
2. Система предупреждения по п.1, в которой индикация (16) обгона принимает форму первой индикации, когда применяется упомянутое первое состояние, и второй индикации, когда применяется упомянутое второе состояние.
3. Система предупреждения по п.1 или 2, в которой упомянутое средство (14) индикации выполнено с возможностью формирования одного или более оптических сигналов, когда упомянутое первое состояние изменяется на упомянутое второе состояние в ответ на упомянутый сигнал (18) отображения.
4. Система предупреждения по п.1, в которой упомянутая зона (22) обгона определяется как область на соседней полосе движения, причем упомянутая область относится к размеру упомянутого транспортного средства таким образом, что длина зоны (22) обгона является длиной транспортного средства плюс заданный безопасный интервал.
5. Система предупреждения по п.1, в которой упомянутое устройство (4) визуального наблюдения принимает форму по меньшей мере одного зеркала заднего вида.
6. Система предупреждения по п.1, в которой упомянутый объект является транспортным средством на соседней полосе движения.
7. Система предупреждения по п.1, в которой упомянутое средство (14) индикации расположено за упомянутой поверхностью (6) визуального наблюдения, которая принимает форму полупрозрачной отражающей поверхности.
8. Система предупреждения по п.1, в которой упомянутое средство (14) индикации расположено вдоль края поверхности (6) визуального наблюдения.
9. Система предупреждения по п.1, в которой упомянутое средство (14) индикации принимает форму светодиодов (LED).
10. Система предупреждения по п.1, в которой упомянутое устройство (4) визуального наблюдения принимает форму устройства визуального отображения (VDU).
| WO 2010064963 A1, 10.06.2010 | |||
| DE 102008003936 A1, 10.07.2008 | |||
| АВТОМОБИЛЬНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА ОБЗОРА ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2405689C2 |

