Преобладающий источник вибрации в вертолете при горизонтальном полете вперед образован вращающейся системой основного несущего винта на частоте следования лопастей. Силы и моменты обычно передаются сквозь трансмиссию через крепления фюзеляжа, вызывая вибрацию в фюзеляже.
Активное управление системами подавления вибрации реакцией конструкции, где гидравлические приводы используются для нейтрализации или по меньшей мере сдерживания вибрации между редуктором и фюзеляжем вертолета, успешно использовались в течение многих лет. Однако гидравлическая мощность, используемая приводами, может быть высокой. Что касается 15-тонного винтокрылого летательного аппарата, непрерывное потребление мощности выше 3 кВт является типичным. В дополнение, использование гидравлического привода для меньшего винтокрылого летательного аппарата не рассматривалось в качестве осуществимого.
В противоположность системам активного подавления вибрации, которые действуют для минимизации вибраций, передаваемых на фюзеляж на протяжении всего диапазона частот, также были предложены системы пассивного подавления вибрации, которые не потребляют внешнюю энергию, так как они «настроены» для работы на одной конкретной частоте. Такие пассивные системы теряют эффективность, если имеет место значительное изменение частоты вращения несущего винта.
Таким образом, настоящее изобретение относится к улучшенной системе для уменьшения передачи вибраций с первого тела на второе тело, в частности, но не исключительно, в которой второе тело является фюзеляжем, например, вертолета, а первое тело является вращающейся системой, например основным несущим винтом вертолета, имеющим множество лопастей несущего винта, поддерживающих фюзеляж или поддерживаемых им. Первичным трактом передачи вибрации является механическое соединение между первым вибрирующим телом и вторым телом, хотя второе тело, например фюзеляж, также может возбуждаться через вторичные тракты, например, такие как аэродинамическая или акустическая стимуляция. В некоторых колебательных системах также может быть желательным подавлять или модифицировать вибрации первого тела.
Примерами других вибрирующих систем, к которым может применяться настоящее изобретение, являются:
a) корабли или суда, в которых первое вибрирующее тело является двигателем или двигателями, а вторым телом является корпус корабля или судна;
b) летательный аппарат, в котором первым вибрирующим телом является винт(ы) и редуктор(ы), а также двигатель(и), а вторым телом является корпус летательного аппарата;
c) системы выработки энергии, в которых первым вибрирующим телом является двигатель внутреннего сгорания или ротор, такой как турбина или генератор, а вторым телом является исходная монтажная конструкция; и
d) другие системы, в которых двигатель внутреннего сгорания или другой механизм с возвратно-поступательным или вращательным движением вызывает вибрацию в первом теле, и требуется уменьшить передачу таких вибраций на соединенное с ним второе тело.
Согласно первому аспекту изобретения предложена система для уменьшения передачи вибрации с первого вибрирующего тела на второе тело, система имеет первую часть, соединенную с первым вибрирующим телом, вторую часть, соединенную со вторым телом, и электрогидростатический привод, соединенный с первой и второй частями, причем электрогидростатический привод выполнен с возможностью непрерывного колебания первой и второй частей относительно друг друга на частоте, по существу соответствующей частоте вибрации первого вибрирующего тела.
Согласно второму аспекту изобретения предложен вертолет, содержащий конструкцию, включающую в себя фюзеляж, поддерживающий вращающуюся систему или поддерживаемый ей, причем части конструкции являются способными к относительному перемещению на частоте возбуждения, имеется множество электрогидростатических приводов, соединенных между относительно подвижными частями конструкции, средство, выполненное с возможностью непрерывного колебания электрогидростатических приводов на частоте, по существу соответствующей частоте возбуждения, и множество датчиков, прикрепленных к вращающейся системе и/или фюзеляжу в выбранных местоположениях, причем датчики выполнены с возможностью формирования сигналов, представляющих динамические изменения в соответствующих выбранных местоположениях во время вращения, средство обработки, выполненное с возможностью обработки сигналов с датчиков и выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых электрогидростатическими приводами, и для изменения характеристик фазы и величины прилагаемых сил таким образом, чтобы компенсировать изменения динамической характеристики вращающейся системы, за счет чего снижается общий уровень вибрации на фюзеляже.
Согласно третьему аспекту изобретения предложен способ уменьшения вибрации в конструкции вертолета, которая включает в себя фюзеляж, который является поддерживающим вращающуюся систему или поддерживаемым ей, причем части конструкции способны к перемещению относительно друг друга на частоте возбуждения, при этом способ содержит этапы соединения множества электрогидростатических приводов между подвижными относительно друг друга частями конструкции, колебания электрогидростатических приводов на частоте, по существу соответствующей частоте возбуждения, формирования сигналов, представляющих динамические изменения во множестве местоположений во вращающейся системе во время вращения, и подачи сигналов в средство обработки, которое выполнено с возможностью выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых электрогидростатическими приводами, и для изменения характеристик фазы и величины прилагаемых сил таким образом, чтобы компенсировать изменения динамической характеристики вращающейся системы, за счет чего снижается общий уровень вибрации на фюзеляже.
Согласно четвертому аспекту изобретения предложен способ уменьшения вибрации во втором теле, причем способ содержит этапы соединения множества электрогидростатических приводов между вторым телом и первым вибрирующим телом, колебания электрогидростатических приводов на частоте, по существу соответствующей частоте вибрации первого тела, формирования сигналов, представляющих динамические изменения во множестве местоположений на первом теле, и подачи сигналов в средство обработки, которое выполнено с возможностью выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых электрогидростатическими приводами, и для изменения характеристик фазы и величины прилагаемых сил таким образом, чтобы компенсировать изменения динамической характеристики первого тела, за счет чего снижается общий уровень вибрации во втором теле.
Согласно пятому аспекту изобретения предложено устройство для уменьшения вибрации конструкции вертолета, который содержит фюзеляж, поддерживающий вращающуюся систему или поддерживаемый ей, и в которой части конструкции способны к перемещению относительно друг друга на частоте возбуждения, причем устройство содержит множество электрогидростатических приводов, выполненных с возможностью соединения между относительно подвижными частями конструкции, средство для непрерывного колебания при функционировании электрогидростатических приводов на частоте, по существу соответствующей частоте возбуждения, и множество датчиков, выполненных с возможностью прикрепления к вращающейся системе и/или фюзеляжу в выбранных местоположениях на вращающейся системе, причем датчики при функционировании выполнены с возможностью формирования сигналов, представляющих динамические изменения в соответствующих выбранных местоположениях во время вращения, причем устройство дополнительно содержит средство обработки, выполненное с возможностью обработки сигналов с датчиков и выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых электрогидростатическими приводами, и для изменения характеристик фазы и величины прилагаемых сил таким образом, чтобы компенсировать изменения динамической характеристики вращающейся системы.
Изобретение будет описано ниже со ссылкой на сопровождающие чертежи, на которых:
фиг. 1 - иллюстративный вид сбоку вертолета, оснащенного системой согласно изобретению;
фиг. 2 - схема гидравлического контура устройства по настоящему изобретению;
фиг. 3 - вид сверху и сбоку в перспективе устройства, реализующего настоящее изобретение;
фиг. 4 - вид снизу и сбоку в перспективе устройства, реализующего настоящее изобретение; и
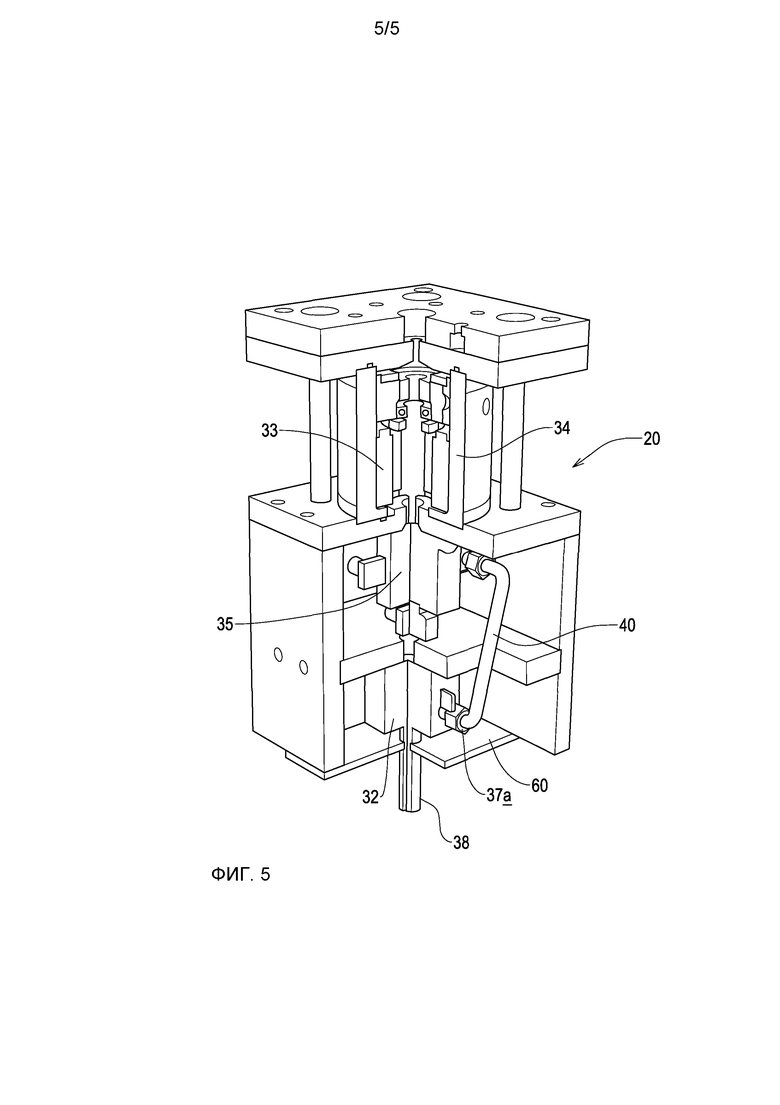
фиг. 5 - вид в перспективе с местным разрезом устройства, реализующего настоящее изобретение.
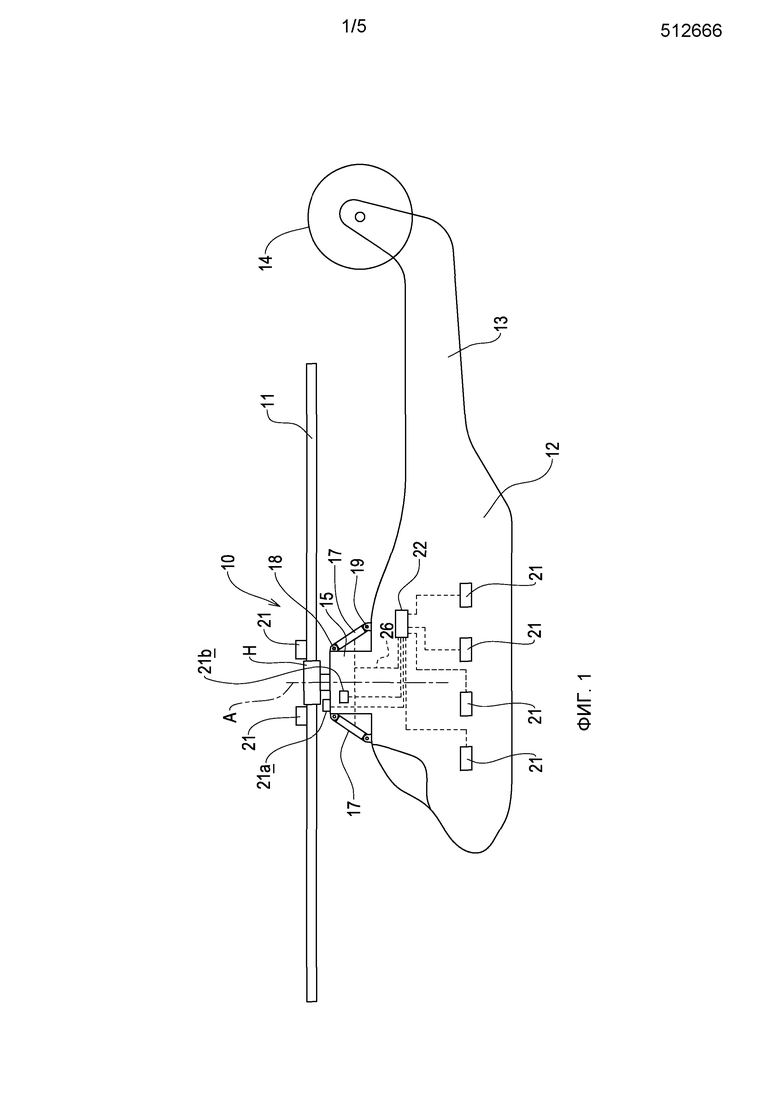
Обращаясь прежде всего к фиг. 1, позицией 10 указана в общем конструкция вертолета, включающая в себя вращающуюся систему, содержащую основной несущий винт 11, фюзеляж 12 вертолета, имеющий продолжающуюся назад хвостовую часть 13, несущую хвостовой винт 14 вертолета. Фюзеляж 12 несет двигатель и редуктор 15, который передает привод на основной несущий винт 11, чтобы приводить в движение несущий винт 11 вокруг оси A. Редуктор 15 прикреплен к фюзеляжу 12 посредством множества узлов 17 упругой стойки, каждый из которых включает в себя электрогидростатический привод 20 согласно настоящему изобретению. В настоящем изобретении есть четыре узла 17 упругой стойки, как правило, по одному, расположенному на каждом углу редуктора 15; два спереди и два сзади.
Электрогидростатические приводы (подробнее описанные ниже) принимают рабочие сигналы 26 из средства 22 обработки, расположенного в фюзеляже 12. Средство 22 обработки принимает входные сигналы с датчиков 21, установленных на лопастях несущего винта у несущего винта 11, и/или иначе, на несущем винте 11, и/или на фюзеляже, и/или на редукторе 15, и/или на одной или более стоек 17, например на одном или обоих их концах, чтобы менять фазу и величину возбуждающих сил, выдаваемых приводами 20. В этой компоновке узлы 17 упругой стойки размещены приблизительно под 45° к вертикали у вертолета при горизонтальном полете, хотя их угол может быть изменен, как требуется.
Таким образом, фюзеляж 12 и редуктор 15 содержат части конструкции вертолета, которые способны к относительному перемещению на частоте, по существу соответствующей частоте возбуждения вибрации. Каждый привод 20 приспосабливается во время работы, чтобы прикладывать силу к фюзеляжу 12, которая отзывается противодействием равной и противоположной силы на редукторе 15.
Датчики 21 в этом примере содержат датчики вибраций, которые выполнены с возможностью формирования сигналов, представляющих динамические изменения в соответствующих выбранных местоположениях по мере того, как вращается несущий винт 11.
В этом варианте осуществления, где датчики являются датчиками вибраций, датчики 21 вибраций оперативно соединены со средством обработки, содержащим компьютер 22, которое переносится в фюзеляже 12, причем компьютер 22 выполнен с возможностью выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых приводами 20, и для изменения характеристик фазы и величины сил. При работе вызывающие вибрацию силы формируются основным несущим винтом 11, например, вследствие несимметричного воздушного потока при горизонтальном полете вперед. Такие вызывающие вибрацию силы, возникающие, в то время как несущий винт 11 вращается, в отсутствие каких бы то ни было компенсирующих систем передаются с редуктора 15 на фюзеляж 12. Эти силы и связанные моменты преимущественно находятся на частоте следования лопастей и ее гармоник, частота следования лопастей является произведением частоты вращения несущего винта 11 и количества лопастей несущего винта.
Вертолет также оснащен одним или более датчиков 21a положения несущего винта, которые выдают в средство 22 обработки сигнал, имеющий отношение к угловому положению несущего винта 11. Это может использоваться для синхронизации средства 22 обработки с источником вибрации, чтобы выдавать опорный сигнал, который дает информацию о частоте и/или фазе. Если сигнал синхронизации не выдается, то информация о частоте/фазе может идентифицироваться по датчикам 21 вибраций.
В качестве альтернативы, могут применяться стратегии управления, основанные на обратной связи по вибрации с или без добавления специфичного сигнала синхронизации частоты из источника вибраций.
Кроме того, вертолет может быть оснащен при необходимости датчиком 21b положения трансмиссии, который выдает в средство 22 обработки сигнал, имеющий отношение к угловому положению вращающегося компонента внутри трансмиссии. Это может использоваться для синхронизации средства 22 обработки с источником вибрации, чтобы выдавать опорный сигнал, который дает информацию о частоте и/или фазе. Если сигнал синхронизации не выдается, то информация о частоте/фазе может идентифицироваться по датчикам 21 вибраций.
Обычно частота следования лопастей для вертолета находится в диапазоне от 10 Гц до 30 Гц, например на 17 Гц. Во время режима полета на замедленном несущем винте частота может быть еще ниже.
Кроме того, динамические изменения, происходящие на несущем винте 11 в местоположениях датчиков 21 вибраций, вызывают настройку фазы и величины выходных сигналов из компьютера 22.
Компьютер 22 выполнен с возможностью анализа сигналов вибрации, принятых с датчиков 21 вибраций, например, чтобы гарантировать, что характеристики реакции по фазе и величине для набора выходных сигналов 26 на приводы 20 и, следовательно, формируемые приводами силы непрерывно менялись, отражая изменение динамических характеристик на несущем винте 11 или фюзеляже 12.
Таким образом, способ и устройство по изобретению накладывают изменения на фазу и величину колебаний на частоте возбуждения электрогидростатических приводов 20, чтобы одновременно сводить на нет или по меньшей мере существенно понижать уровень вибрации, передаваемой с редуктора на фюзеляж 12, тем самым давая значительное улучшение общего уровня вибраций фюзеляжа 12 вертолета.
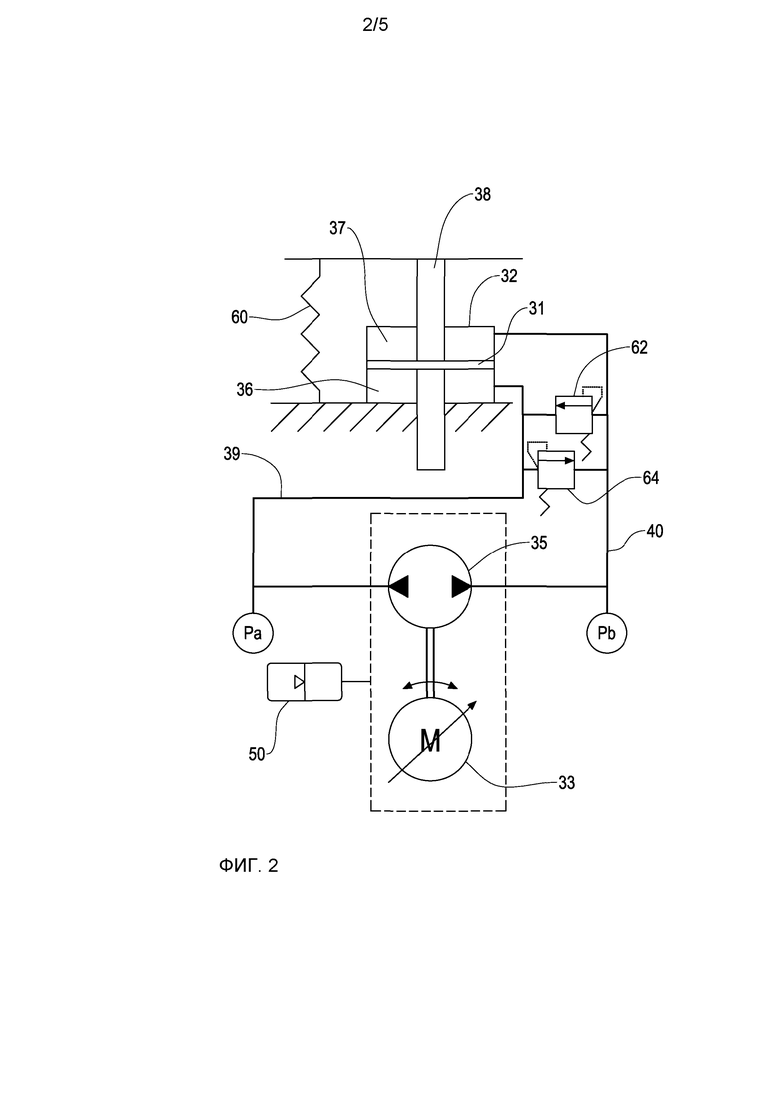
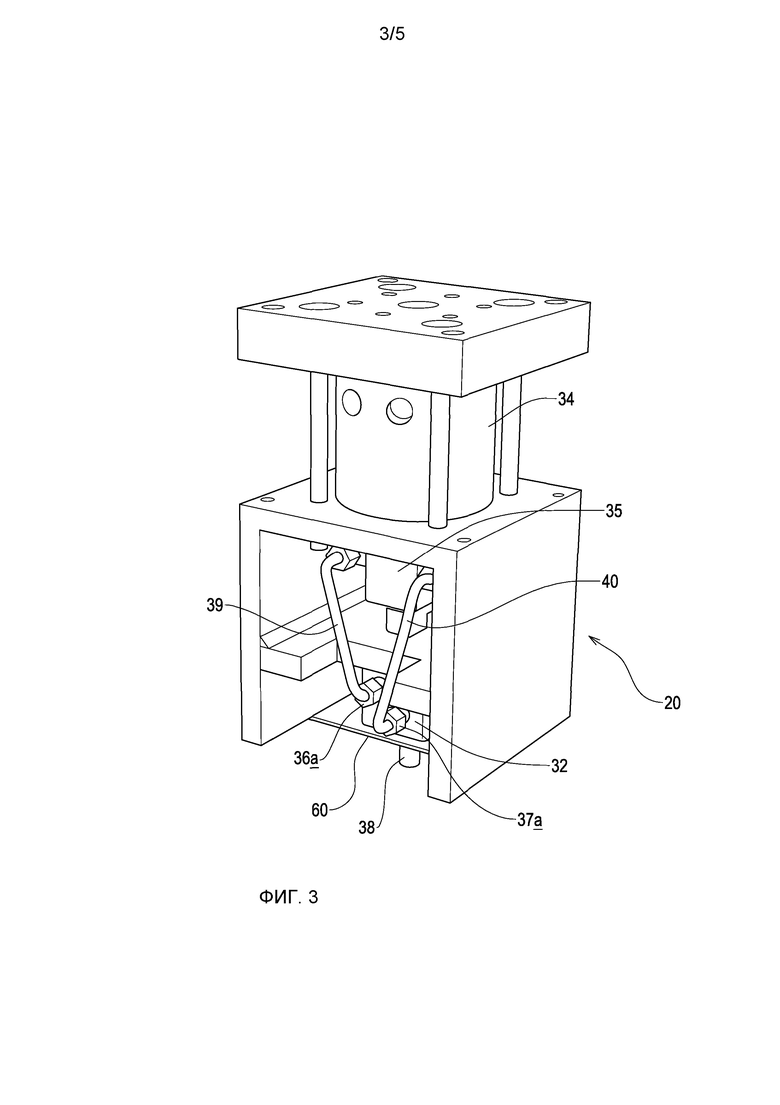
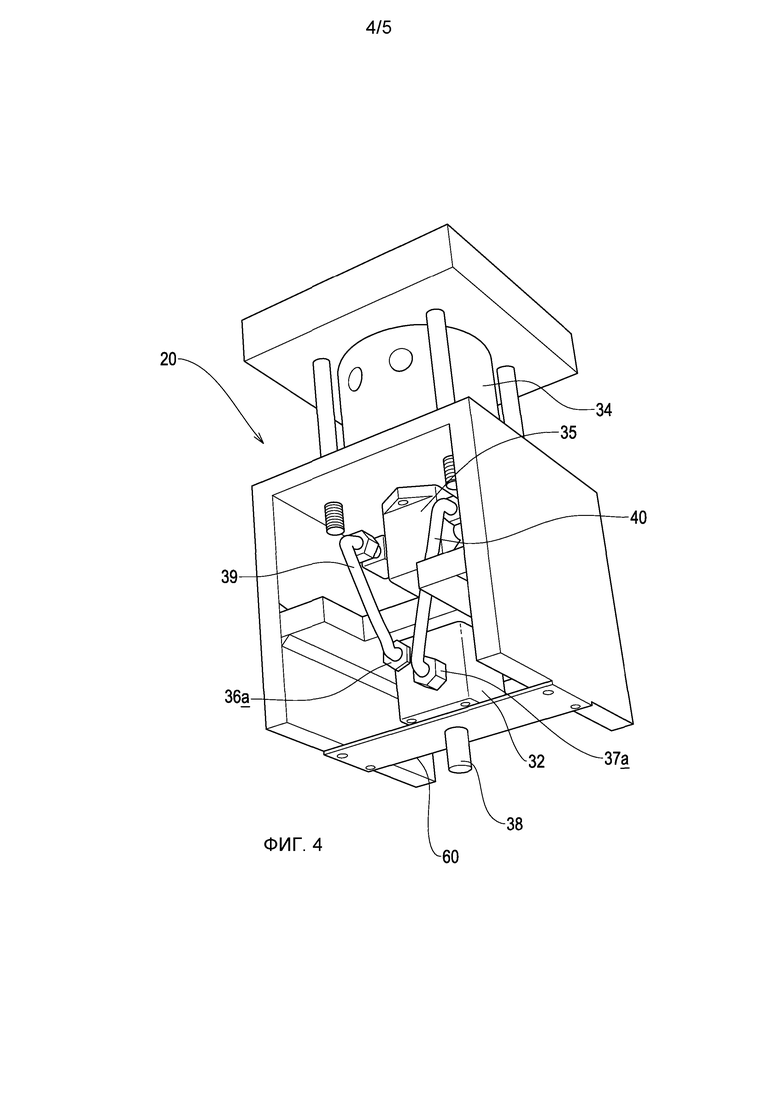
Подробнее, как показано на фиг. 2-5, каждый электрогидростатический привод 20 включает в себя поршень 31, расположенный в цилиндре 32, и электродвигатель 33, соединенный с возможностью приведения в действие (то есть соединенный с возможностью вращения) с насосом 35, выполненным с возможностью перемещения гидравлической текучей среды, чтобы осуществлять перемещение поршня 31 в цилиндре 32. Поршень 31 соединен с выходным валом 38. Вариант осуществления привода, показанный на чертежах, был изготовлен в целях испытания, и, таким образом, его конфигурация вероятно будет изменена, чтобы он умещался внутри стойки 17. Однако составные части привода 20 функционально останутся прежними.
В представленном примере электродвигатель 33 является бесщеточным двигателем постоянного тока (могли бы использоваться другие типы двигателя), поддерживаемым в кожухе 34. Кожух соединен с насосом 35, причем имеется соединение по текучей среде между насосом 35 и кожухом 34 электродвигателя. Это означает, что электродвигатель 33 в этом варианте осуществления погружен в гидравлическую текучую среду и, таким образом, работает «мокрым». Однако следует понимать, что двигатель, в качестве альтернативы, может работать «сухим».
Двигатель 33 выполнен с возможностью приводить в действие насос 35, через надлежащую зубчатую передачу, по часовой стрелке или против часовой стрелки, чтобы побуждать гидравлическую текучую среду в системе перемещаться в одном из двух направлений. Поршень 31 делит цилиндр 32 на первую 36 и вторую 37 камеры. Первая камера 36 имеет вход 36a, который соединен с первым выходом насоса 35 первым трубопроводом 39 для текучей среды. Вторая камера 37 имеет вход 37a, который соединен со вторым выходом насоса 35 вторым трубопроводом 40 для текучей среды. Насос 35 и поршень/цилиндр 31, 32 выполнены таким образом, чтобы перемещение гидравлической текучей среды насосом 35 (например, при вращении по часовой стрелке) в первую камеру 36 вызывало перемещение поршня 31 в первом направлении (в этом примере, от двигателя 33), тогда как перемещение гидравлической текучей среды насосом 35 (например, при вращении против часовой стрелки) во вторую камеру 37 осуществляло перемещение поршня 31 в противоположном направлении. Двигатель 33 способен к быстрому изменению своего направления вращения, с тем чтобы подгонять частоту вибрации вибрирующего тела, которым, в этом примере, является редуктор 15.
Датчики давления, например измерительные преобразователи Pa и Pb, предусмотрены для считывания давления текучей среды в камерах 36, 37 и для выдачи обратной связи в средство 22 обработки и/или для предупреждения пилота о повышенном давлении в системе.
Привод 20 также включает в себя накопитель 50 для повышения давления гидравлической текучей среды в системе. Накопитель 50 соединен по текучей среде с кожухом 34, поддерживающим электродвигатель 33. В альтернативном варианте осуществления (не показанном) накопитель может быть замещен камерой с податливыми стенками для повышения давления гидравлической текучей среды в системе.
В представленном примере можно увидеть, что электродвигатель 33 и насос 35 расположены в линию (или выровнены в осевом направлении) с поршнем 31 и цилиндром 32. Конечно, должно быть принято во внимание, что, однако, электродвигатель 33 и насос 35, в качестве альтернативы, могут быть расположены параллельно с поршнем 31 и цилиндром 32. Другими словами, электродвигатель 33 и насос 35 могут быть расположены по одну сторону от поршня 31 и цилиндра 32 таким образом, чтобы они не были выровнены в осевом направлении.
Как показано на фиг. 2-5, привод 20 расположен на опорах 17 параллельно податливому элементу 60 конструкции, действующему в качестве пружины. Конфигурация привода 20 и пружины 60 означает, что можно, но не необходимо, чтобы инерция насоса 35 и двигателя 33 могли выбираться, с тем чтобы подстраивать резонансную частоту получающейся в результате динамической системы. Этот резонанс (или закрытый резонанс) может использоваться для снижения величины мощности, требуемой, чтобы прикладываться двигателем 33 в действии. В дополнение, резонанс может использоваться для обеспечения полного пассивного подавления передаваемой вибрации через стойки 17 и этот признак может использоваться для обеспечения защитной системы регулирования вибраций, если электрической команды двигателя 33 не будет в распоряжении (например, вслед за некоторой внутренней или внешней неисправностью, оказывающей влияние на систему). Другими словами, система может действовать в качестве пассивной или активной системы.
Как показано на фиг. 2, предусмотрены при необходимости клапаны 62, 64 сброса давления, связывающие тракт текучей среды между обеими камерами 36, 37 цилиндра 32 в случае избыточного давления (то есть если большая внешняя сила прикладывается быстрее, чем система управления может среагировать на нее). Клапан 62 дает текучей среде (при превышении предопределенного давления) возможность проходить из камеры 37 в камеру 36, а клапан 64 дает текучей среде (при превышении предопределенного давления) возможность проходить из камеры 36 в камеру 37.
Привод 20 сконструирован, чтобы действовать как в качестве устройства активного подавления вибрации, так и в качестве устройства пассивного подавления вибрации, в зависимости от частоты вибрации тела, например редуктора, с которым оно соединено. Привод 20 был сконструирован («настроен») таким образом, чтобы на выбранной частоте, например 17 Гц, на двигателе 33 требовалась выдача минимальной мощности, так как поршень, двигатель и насос (со своей зубчатой передачей) действуют в качестве резонансной массы при вибрационных нагрузках на новой частоте. По мере того как частота, передаваемая на стойку 17, отходит от выбранной пассивной частоты, будет необходима подача питания на двигатель 33, чтобы нейтрализовать такую частоту, с тем чтобы предотвратить или по меньшей мере уменьшить передачу вибрации на фюзеляж. Другими словами, резонансная частота инерции гидравлической текучей среды, насоса 35 и ротора электродвигателя 33 соответствуют основной частоте вибраций. Гидравлический цилиндр 32, текучая среда и насос 35 действуют в качестве однокаскадного передаточного отношения, и инерция двигателя 33 является основной резонирующей массой.
Электрическая мощность, используемая двигателем 33, компенсирует трение в приводе и другие потери, а также смещение рабочей точки от резонансной частоты. Это ведет к снижению требуемой мощности по сравнению с чисто активной системой подавления вибраций. Чисто активная система с электроприводом вероятно потребовала бы принудительного жидкостного охлаждения и дополнительных насосов и радиаторов для отвода достаточного количества тепла от двигателя, а отсюда, электрогидростатический привод по настоящему изобретению является крайне полезным.
Настоящее изобретение является преимущественным над известными системами подавления вибрации, так как оно применимо в винтокрылом летательном аппарате всех размеров - оно является масштабируемым в зависимости от сил и частот, испытываемых винтокрылым летательным аппаратом. Оно, к тому же, обеспечивает сокращенное техническое обслуживание и сниженный риск возгорания по сравнению с существующими системами гидравлического привода, так как нет потребности в гидравлических линиях до привода. Вследствие «закрытой» природы привода 20 он может легко сниматься для технического обслуживания или замены.
Могут быть созданы различные модификации, не выходящие за рамки объема изобретения. Например, может быть изменено количество приводов 20, предусмотренных между редуктором 15 и фюзеляжем 12. Будет принято во внимание, что изобретение может использоваться для снижения уровней вибрации в фюзеляже 12 посредством соединения приводов, таких как 20, между любыми частями конструкции вертолета, которые способны к относительному перемещению на частоте возбуждения.
В каждом случае датчики предпочтительно содержат датчики 21 вибраций, но один или более из всех датчиков, в качестве альтернативы, может измерять одно или более из сил, механических напряжений, ускорений и/или скоростей.
При необходимости изобретение, в качестве альтернативы или дополнительно, может быть применено к вращающейся системе, содержащей хвостовой винт 14 вертолета 10, в каком случае считывание было бы прикреплено к такой вращающейся системе 14.
Несмотря на то что настоящее изобретение было описано выше со ссылкой на его использование в вертолете, должно быть принято во внимание, что электрогидростатические приводы 20 по настоящему изобретению и их способ эксплуатации могли бы применяться к другим вибрирующим системам, таким как:
a) корабли или суда, где первое вибрирующее тело является двигателем или двигателями, а вторым телом является корпус корабля или судна;
b) летательный аппарат, где первым вибрирующим телом является винт(ы) и редуктор(ы), а также двигатель(и), а вторым телом является корпус летательного аппарата;
c) системы выработки энергии, где первым вибрирующим телом является двигатель внутреннего сгорания или ротор, такой как турбина или генератор, а вторым телом является исходная монтажная конструкция; и
d) другие системы, где двигатель внутреннего сгорания или другой механизм с возвратно-поступательным или вращательным движением вызывает вибрацию в первом теле и требуется уменьшить передачу таких вибраций на соединенное с ним второе тело.
В контексте настоящего описания и формулы изобретения термины «содержит» и «содержащий», а также их варианты означают, что указанные признаки, этапы или элементы включены в состав. Термины не должны толковаться в смысле, исключающем наличие других признаков, этапов или компонентов.
Признаки, раскрытые в вышеприведенном описании или нижеследующей формуле изобретения либо на сопровождающих чертежах, выраженные в своих конкретных формах или с точки зрения средств для выполнения раскрытой функции или способа, либо последовательности операций для достижения раскрытого результата, при необходимости могут по отдельности или в любом сочетании таких признаков использоваться для осуществления изобретения в его разнообразных формах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВСЕСОЮЗНАЯ ПАТЕНТНв-ТЕХНИЧЕГКДЯБИБЛИОТЕКА | 1971 |
|
SU289569A1 |
| УСТРОЙСТВО ДЛЯ УМЕНЬШЕНИЯ ВИБРАЦИИ КРЕСЛА ПИЛОТА ВЕРТОЛЕТА | 2009 |
|
RU2504487C1 |
| ВИНТ ДЛЯ СПОСОБНОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА | 2020 |
|
RU2799170C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2015 |
|
RU2600966C1 |
| СПОСОБ ОЦЕНКИ ВНЕШНЕЙ СИЛЫ, ДЕЙСТВУЮЩЕЙ НА ЭЛЕКТРОГИДРОСТАТИЧЕСКИЙ ПРИВОД | 2016 |
|
RU2709707C2 |
| ВЕРТОЛЕТ С ВОДЯНЫМИ РЕАКТИВНЫМИ УСТРОЙСТВАМИ (ВАРИАНТЫ) | 2007 |
|
RU2344967C1 |
| ПОЖАРНЫЙ ГИДРОВЕРТОЛЕТ-КРАН | 2022 |
|
RU2797539C1 |
| ВИНТ ПРИСПОСОБЛЕННОГО К ЗАВИСАНИЮ ЛЕТАТЕЛЬНОГО АППАРАТА, СОДЕРЖАЩИЙ УСТРОЙСТВО ДЕМПФИРОВАНИЯ ВИБРАЦИИ | 2014 |
|
RU2652491C2 |
| УСТРОЙСТВО ГАШЕНИЯ ВИБРАЦИЙ ДЛЯ ВЕРТОЛЕТА | 2019 |
|
RU2780246C2 |
| ОБТЕКАЕМОЕ ТЕЛО И СИСТЕМА ОБЕСПЕЧЕНИЯ БОЛЬШОЙ ПОДЪЕМНОЙ СИЛЫ С ТАКИМ ОБТЕКАЕМЫМ ТЕЛОМ | 2009 |
|
RU2494923C2 |
Группа изобретений относится к вертолету, способу и устройству для уменьшения вибрации. Вертолет содержит конструкцию, включающую фюзеляж, вращающуюся систему, устройство для уменьшения вибрации. Устройство для уменьшения вибрации содержит электрогидростатические приводы, средство колебания электрогидростатических приводов, датчики динамических изменений, средство обработки. Для уменьшения вибрации в конструкции вертолета соединяют электрогидростатические приводы между подвижными друг относительно друга частями конструкции, вызывают колебания приводов на частоте, соответствующей частоте возбуждения, формируют сигналы динамических изменений в различных частях вращающейся системы и подают их в средство обработки, которое выдает компенсирующие сигналы управления электрогидростатическими приводами. Обеспечивается уменьшение вибрации в подвижно соединенных вибрирующих частях конструкции вертолета. 3 н. и 13 з.п. ф-лы, 5 ил.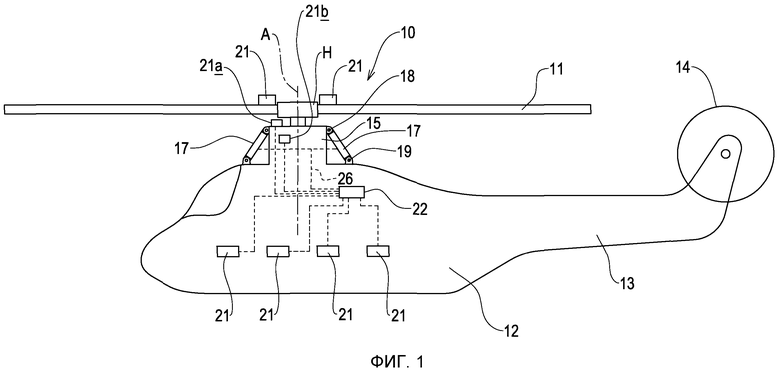
1. Вертолет, содержащий конструкцию, включающую в себя фюзеляж, поддерживающий вращающуюся систему или поддерживаемый ей, причем части конструкции способны к относительному перемещению на частоте возбуждения, причем имеется множество электрогидростатических приводов, соединенных между подвижными относительно друг друга частями конструкции, средство, выполненное с возможностью непрерывного колебания электрогидростатических приводов на частоте, по существу соответствующей частоте возбуждения, и множество датчиков, прикрепленных к вращающейся системе и/или фюзеляжу в выбранных местоположениях, причем датчики выполнены с возможностью формирования сигналов, представляющих динамические изменения в соответствующих выбранных местоположениях во время вращения, средство обработки, выполненное с возможностью обработки сигналов с датчиков и выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых электрогидростатическими приводами, и для изменения характеристик фазы и величины прилагаемых сил таким образом, чтобы компенсировать изменения динамической характеристики вращающейся системы, за счет чего снижается общий уровень вибрации на фюзеляже.
2. Вертолет по п. 1, в котором вращающаяся система является основным несущим винтом.
3. Вертолет по п. 1 или 2, в котором одна часть конструкции, которая способна к перемещению относительно другой части конструкции, содержит одно из двигателя, трансмиссии и опорной конструкции вращающейся системы или узел из более чем одного из них.
4. Вертолет по п. 1, в котором датчики измеряют одно или более из сил, напряжений, ускорений и/или скоростей.
5. Вертолет по п. 1, в котором каждый из электрогидростатических приводов включает в себя поршень, расположенный в цилиндре, и электродвигатель, соединенный с насосом с возможностью приведения в движение, причем насос выполнен с возможностью перемещения гидравлической текучей среды таким образом, чтобы осуществлять перемещение поршня в цилиндре.
6. Вертолет по п. 5, в котором поршень делит цилиндр на первую и вторую камеры таким образом, что перемещение гидравлической текучей среды насосом в первую камеру осуществляет перемещение поршня в первом направлении, и таким образом, что перемещение гидравлической текучей среды насосом во вторую камеру осуществляет перемещение поршня во втором направлении.
7. Вертолет по п. 5 или 6, в котором электрогидростатические приводы имеют трубопровод для текучей среды, соединяющий друг с другом первую и вторую камеры, причем насос расположен в трубопроводе для текучей среды для перемещения гидравлической текучей среды либо в направлении первой камеры и от второй камеры, либо в направлении второй камеры и от первой камеры.
8. Вертолет по п. 5 или 6, в котором электрогидростатические приводы имеют накопитель или камеру с податливыми стенками для повышения давления гидравлической текучей среды в приводе.
9. Вертолет по п. 8, в котором накопитель соединен по текучей среде с камерой, содержащей двигатель.
10. Вертолет по п. 5 или 6, в котором электродвигатель и насос каждого электрогидростатического привода расположены последовательно с поршнем и цилиндром.
11. Вертолет по п. 5 или 6, в котором электродвигатель и насос каждого электрогидростатического привода расположены параллельно с поршнем и цилиндром.
12. Способ уменьшения вибрации в конструкции вертолета, который включает в себя фюзеляж, поддерживающий вращающуюся систему или поддерживаемый ей, причем части конструкции способны к относительному перемещению на частоте возбуждения, причем способ содержит этапы, на которых соединяют множество электрогидростатических приводов между подвижными относительно друг друга частями конструкции, вызывают колебания электрогидростатических приводов на частоте, по существу соответствующей частоте возбуждения, формируют сигналы, представляющие динамические изменения во множестве местоположений во вращающейся системе во время вращения, и подают сигналы в средство обработки, которое выполнено с возможностью выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых электрогидростатическими приводами, и изменения характеристик фазы и величины прилагаемых сил таким образом, чтобы компенсировать изменения динамической характеристики вращающейся системы, за счет чего снижается общий уровень вибрации на фюзеляже.
13. Способ по п. 12, в котором вращающаяся система содержит основной несущий винт вертолета, имеющий множество лопастей винта, а частота возбуждения по существу соответствует частоте следования лопастей несущего винта.
14. Способ по п. 12 или 13, в котором электрогидростатические приводы имеют признак(и) по любому из пп. 5-11.
15. Устройство для уменьшения вибрации конструкции вертолета, который содержит фюзеляж, поддерживающий вращающуюся систему или поддерживаемый ей, и в которой части конструкции способны к относительному перемещению на частоте возбуждения, причем устройство содержит множество электрогидростатических приводов, выполненных с возможностью соединения между относительно подвижными частями конструкции, средство для непрерывного колебания при функционировании электрогидростатических приводов на частоте, по существу соответствующей частоте возбуждения, и множество датчиков, выполненных с возможностью прикрепления к вращающейся системе и/или фюзеляжу в выбранных местоположениях на вращающейся системе, причем датчики при функционировании выполнены с возможностью формирования сигналов, представляющих динамические изменения в соответствующих выбранных местоположениях во время вращения, причем устройство дополнительно содержит средство обработки, выполненное с возможностью обработки сигналов от датчиков и выдачи выходных сигналов для управления фазой и величиной прилагаемых сил, формируемых электрогидростатическими приводами, и для изменения характеристик фазы и величины упомянутых сил таким образом, чтобы компенсировать изменения динамической характеристики вращающейся системы.
16. Устройство по п. 15, в котором электрогидростатические приводы имеют признак(и) по любому из пп. 5-11.
| US 5732905 A, 31.03.1998 | |||
| FR 2946401 A1, 10.12.2010 | |||
| ТОПЛИВНЫЙ БАЛЛОНЧИК С ГИБКОЙ ВНУТРЕННЕЙ КАМЕРОЙ | 2004 |
|
RU2316079C2 |
| ГИДРАВЛИЧЕСКИЙ КВАНТОВЫЙ ДВИГАТЕЛЬ | 2000 |
|
RU2160840C1 |
| ВСЕСОЮЗНАЯ ПАТЕНТНв-ТЕХНИЧЕГКДЯБИБЛИОТЕКА | 0 |
|
SU289569A1 |

