Настоящее изобретение относится к способу автоматического управления головкой самонаведения с системой самонаведения на базе бесплатформенной навигационной системы, установленной на реактивном снаряде, причем реактивный снаряд является, в частности, авиационной ракетой, оснащенной такой головкой самонаведения.
Головка самонаведения «с системой самонаведения на базе бесплатформенной навигационной системы» характеризуется, обычно, фиксированным направлением визирования, привязанным к осям реактивного снаряда, на котором она установлена.
Известно, что обычная головка самонаведения ракеты представляет значительную часть от общей стоимости указанной ракеты и может являться наиболее дорогостоящей деталью (иногда может составлять почти половину стоимости), в частности, за счет сложности механизмов ориентирования оптических средств, точных данных, необходимых для выполнения этого ориентирования, и их контроля.
Головка самонаведения «с системой самонаведения на базе бесплатформенной навигационной системы» позволяет, ввиду отсутствия необходимости в этих механизмах, значительно снизить ее стоимость (как правило, в 3-10 раз), что оправдывает целесообразность установки такой головки самонаведения на более дешевой ракете. Зона видимости головки самонаведения с системой самонаведения на базе бесплатформенной навигационной системы в целом больше, чем зона видимости обычной головки самонаведения с оптической системой ориентирования, что позволяет ракете продолжать следить за целью, несмотря на возможный наклон и/или отклонение ракеты, и независимо от скорости цели.
В случае ракеты типа «LOAL» («Захват цели после пуска»), в которой согласно определению головка самонаведения захватывает цель после пуска, ракета не видит цель в начале полета. Полет начинается со стадии наведения, называемого наведением «на основном маршевом участке траектории», в ходе которого происходит приведение ракеты на достаточно близкое к цели расстояние для обнаружения последней посредством головки самонаведения (захват цели). Тем не менее, ряд факторов может приводить, совместно или независимо друг от друга, к потере цели из зоны видимости головки самонаведения в ходе указанной стадии, предусмотренной для захвата (и, следовательно, к срыву боевого задания), причем указанные факторы включают следующее:
- дрейф навигационной системы реактивного снаряда, как в отношении положения, так и в отношении ориентации. В этом случае, реактивный снаряд не может прибыть в назначенный пункт и/или он неправильно ориентирован и «не видит» цель;
- смещение цели. Цель может переместиться и больше не будет находиться в области наблюдения головки самонаведения в конце основного маршевого участка траектории.
Эти два фактора ограничивают дальность действия ракеты.
Для придания большей надежности стадии захвата цели в отношении этих двух факторов - дрейфа и смещения цели - известно несколько решений (обеспечивающих увеличение допустимой длительности стадии наведения на основном маршевом участке траектории и, следовательно, дальности действия и возможностей ракеты). Можно, в частности, привести следующие решения:
a) увеличение размера зоны видимости головки самонаведения или ее дальности действия, что позволяет осуществлять обнаружение намного раньше и предполагает меньшее количество ошибок или смещения захватываемой цели;
b) улучшение возможностей навигационной системы с целью уменьшения вектора инерционной ошибки дрейфа; и
c) оснащение ракеты каналом передачи данных для обновления координат цели и уменьшения ошибки, связанной с целью.
Однако эти различные традиционные решения обладают недостатками. В частности:
a) при равной стоимости увеличение размера зоны видимости головки самонаведения происходит за счет уменьшения дальности действия и точности, и аналогично, улучшение одних параметров происходит за счет ухудшения других, тем самым преимущество этих решений ограничивается (если не теряется полностью), за исключением увеличения общего качества датчиков, что повышает стоимость, а также технических возможностей. В силу ограничивающих условий, вызываемых при эксплуатации головки самонаведения с системой самонаведения на базе бесплатформенной навигационной системы, требуемая зона видимости является уже большой (и характеризуется, следовательно, низкой точностью), и сделать ее еще больше представляется сложным (проблема, связанная с пространством для оптических средств, точностью измерения возникших ошибок);
b) в отношении улучшения возможностей системы навигации с целью уменьшения вектора инерционной ошибки дрейфа, помимо очевидной проблемы, связанной со стоимостью такого решения (в случае введения дополнительного датчика (GPS, например) или выбора лучшего навигационного узла), таким способом могут быть исправлены только некоторые ошибки. Кроме этого это не относится к вероятному смещению цели; и
c) в отношении оснащения ракеты каналом передачи данных с целью обновления координат цели это решение вызывает проблемы, связанные со стоимостью, размерами ракеты и боевой способностью (ограничение системы). Это решение также не позволяет исправлять ошибки, возникающие в результате дрейфа системы навигации.
Таким образом, эти стандартные решения не являются в полной мере удовлетворительными.
Целью настоящего изобретения является устранение этих недостатков. Настоящее изобретение относится к способу автоматического управления головкой самонаведения с системой самонаведения на базе бесплатформенной навигационной системы, установленной на реактивном снаряде, в частности на авиационной ракете, которая предусматривает стадию захвата цели, в ходе которой она пытается обнаружить цель, и которая характеризуется направлением визирования, при этом указанное направление визирования является фиксированным по отношению к реактивному снаряду и направлено вдоль продольной оси последнего, причем указанный способ управления обеспечивает увеличение возможностей обнаружения (захвата) цели, независимо от характера возможной ошибки (ошибка дрейфа системы навигации или ошибка за счет смещения цели), без необходимости применения какого-либо датчика или дополнительных расходов.
Таким образом, в соответствии с настоящим изобретением указанный способ характеризуется тем, что указанным реактивным снарядом автоматически управляют (или «ведут») таким образом, чтобы продольная ось указанного реактивного снаряда в ходе стадии захвата головкой самонаведения описывала окружность, радиус которой увеличивается во времени, пока цель не будет обнаружена.
Следовательно, посредством такого управления реактивным снарядом, обеспечивающего описание увеличивающейся окружности вокруг направления его полета, увеличивают зону, изучаемую головкой самонаведения на стадии захвата цели, направление визирования которой фиксировано по продольной оси реактивного снаряда. Таким образом, значительно увеличивают возможности обнаружения цели, независимо от характера возможной ошибки (ошибки дрейфа навигационной системы или ошибки за счет смещения цели), без необходимости применения какого-либо датчика или дополнительных расходов.
Настоящее изобретение можно применять для всех типов ракет с головкой самонаведения с системой самонаведения на базе бесплатформенной навигационной системы, которые осуществляют захват (визирование и отслеживание цели) после пуска, без других ограничивающих условий (дальность действия, принцип действия и т.п.), и, в частности, на ракетах класса «воздух-земля» с низкой стоимостью.
Предпочтительно радиус действия управления на начальном участке траектории зависит от зоны видимости головки самонаведения и, например, равен половине зоны видимости указанной головки самонаведения.
Согласно предпочтительному варианту осуществления на реактивный снаряд передают две команды, предназначенные для выполнения изменений, соответственно, с одной стороны, угла между вектором направления, связанным с продольной осью реактивного снаряда, и первой осью реактивного снаряда и, с другой стороны, угла между указанным вектором направления и второй осью реактивного снаряда, причем эти две оси реактивного снаряда образуют плоскость, перпендикулярную продольной оси реактивного снаряда, и эти две команды являются такими, что указанные изменения углов являются синусоидальными и смещенными по фазе на π/2. Следовательно, весь реактивный снаряд совершает колебательное движение по своей оси, обеспечивая изучение головкой самонаведения области наблюдения, которая значительно больше одной зоны видимости последней.
Предпочтительно период указанных синусоидальных изменений углов незначительно увеличивается со временем, обеспечивая увеличение зоны поиска реактивного снаряда. Настоящее изобретение также относится к реактивному снаряду, в частности авиационной ракете, содержащей головку самонаведения типа с системой самонаведения на базе бесплатформенной навигационной системы, характеризующейся стадией захвата цели, в ходе которой она пытается обнаружить цель, и которая имеет направление визирования, причем указанное направление визирования является фиксированным по отношению к реактивному снаряду и направлено вдоль продольной оси последнего.
В соответствии с настоящим изобретением указанный реактивный снаряд характеризуется тем, что содержит средства автоматического управления для управления (или «ведения») указанным реактивным снарядом таким образом, чтобы его продольная ось во время полета и в ходе стадии захвата головкой самонаведения описывала окружность, радиус которой увеличивается во времени, пока цель не будет обнаружена.
Согласно предпочтительному варианту осуществления указанные средства автоматического управления выполнены с возможностью передачи на реактивный снаряд одновременно двух команд, предназначенных для изменения, соответственно, с одной стороны, угла между вектором направления, связанным с продольной осью реактивного снаряда, и первой осью реактивного снаряда и, с другой стороны, угла между указанным вектором направления и второй осью реактивного снаряда, причем эти две оси реактивного снаряда образуют плоскость, перпендикулярную продольной оси реактивного снаряда, и эти две команды являются такими, что указанные изменения углов являются синусоидальными и смещенными по фазе на π/2.
Более того, предпочтительно указанные средства автоматического управления являются частью системы автоматического управления указанного реактивного снаряда, которая, как правило, содержит все необходимые средства для осуществления полета реактивного снаряда и его наведения.
Фигуры, приведенные на прилагаемых чертежах, более подробно поясняют осуществление настоящего изобретения. На этих фигурах одинаковыми ссылочными позициями обозначены похожие элементы.
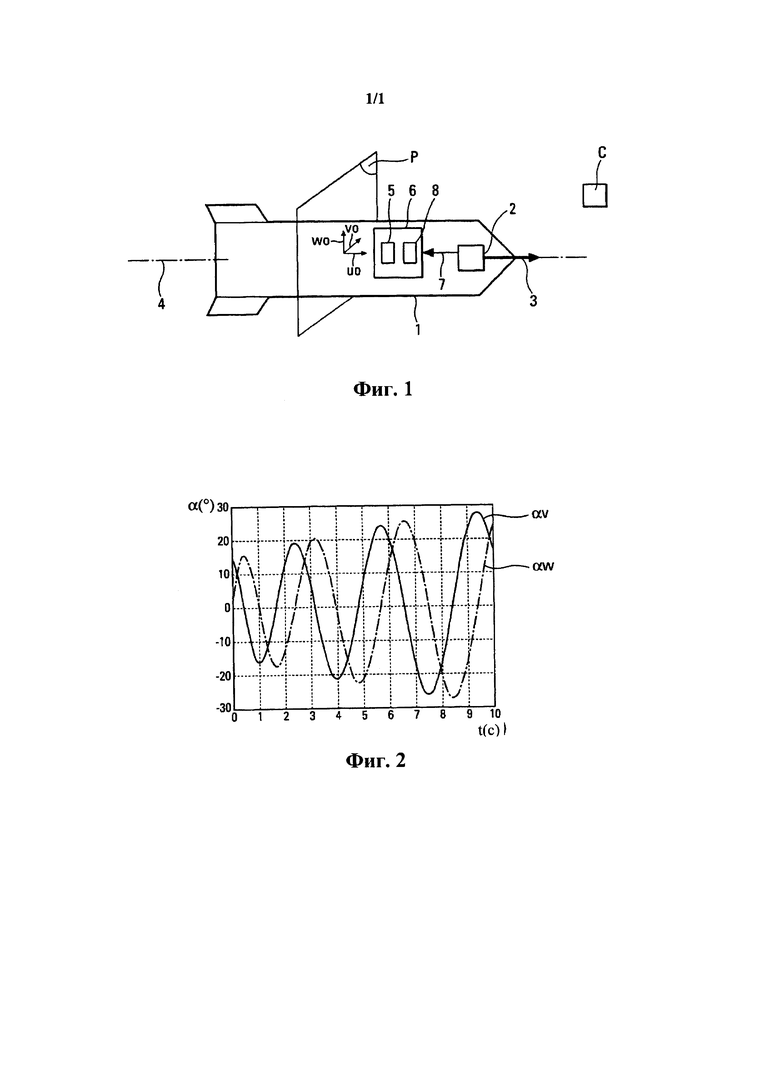
На фиг.1 схематически показана ракета, оснащенная головкой самонаведения, описанная в настоящем изобретении.
На фиг.2 представлен график, описывающий характеристики предпочтительного режима управления ракетой.
Настоящее изобретение относится к реактивному снаряду 1, в частности к авиационной ракете, представленной схематически на фиг.1, и предназначено для управления работой головки 2 самонаведения с системой самонаведения на базе бесплатформенной навигационной системы, установленной на указанном реактивном снаряде 1.
Обычно такая головка 2 самонаведения характеризуется стадией захвата, в ходе которой она пытается обнаружить цель C, в частности подвижную цель. Эта головка 2 самонаведения характеризуется направлением 3 визирования, фиксированным по отношению к реактивному снаряду 1 и направленным вдоль продольной оси 4 последнего.
Такой реактивный снаряд 1 содержит традиционные средства 5 управления, которые являются частью традиционной системы 6 управления (связанной по каналу 7 с головкой 2 самонаведения и схематически показанной на фиг.1) и которые содержат все необходимые элементы для наведения и ведения реактивного снаряда 1 для поражения цели C, как правило, подвижной. Эти средства 5 управления содержат, в частности, средства обработки информации, которые автоматически выдают команды на ведение, позволяющие реактивному снаряду 1 отслеживать траекторию перехвата цели C, и средства ведения (не показаны), такие как органы управления или любые другие известные элементы, которые автоматически передают эти команды ведения на реактивный снаряд 1. Все эти традиционные средства (системы 6) хорошо известны и не будут далее описаны.
Предпочтительно указанным реактивным снарядом 1 является ракета типа «LOAL», в которой согласно определению головка 2 самонаведения захватывает цель С после пуска. Эта ракета не видит цель С в начале выполнения полета. Как правило, полет начинается со стадии наведения, называемого наведением «на основном маршевом участке траектории», в ходе которого происходит приведение указанной ракеты на достаточно близкое к цели С расстояние для обнаружения последней посредством головки 2 самонаведения.
Кроме того, в соответствии с настоящим изобретением указанный реактивный снаряд 1 содержит средства 8 автоматического управления для управления (или ведения) указанным реактивным снарядом 1 таким образом, чтобы продольная ось 4 указанного реактивного снаряда 1 во время полета и в ходе стадии захвата головкой 2 самонаведения (то есть во время поиска цели C) описывала окружность, радиус которой увеличивается во времени. Эта команда выполняется до момента обнаружения цели С. Таким образом, благодаря настоящему изобретению реактивный снаряд 1 наводят и ведут по стандартной траектории с помощью средств 5, причем к стандартному управлению и ведению добавляют управление, осуществляемое с помощью средств 8 управления, для описания реактивным снарядом 1 окружности, увеличивающейся вокруг направления его полета.
Таким образом, посредством такого управления реактивным снарядом 1, которое разработано для обеспечения описания им увеличивающейся окружности, увеличивают зону, наблюдаемую головкой 2 самонаведения на стадии захвата. На самом деле головка 2 самонаведения может изучать область наблюдения, которая значительно больше одной зоны видимости с фиксированными заданными размерами. Следовательно, возможности головки 2 самонаведения обнаружить цель C значительно увеличены, независимо от характера возможной ошибки (ошибки дрейфа навигационной системы или ошибки за счет смещения цели), без необходимости применения датчика или дополнительных расходов.
Согласно предпочтительному варианту осуществления указанные средства 8 автоматического управления являются частью указанной системы 6 автоматического управления, которая, как правило, содержит все необходимые средства для осуществления полета реактивного снаряда 1 и его наведения на цель C.
Рассмотрим прямоугольную систему координат (ось тангажа, ось рысканья и ось крена) (













Средства 8 управления предназначены для изменения этих двух углов αv и αw.
Суть настоящего изобретения заключается в описании осью снаряда окружности, радиус которой увеличивается во времени, причем команды, сгенерированные средствами 8 управления, обеспечивают получение указанных изменений углов, которые являются синусоидальными и смещенными по фазе на π/2, как представлено на фиг.2, на которой показаны изменения углов α (выраженных в °) во времени t (выраженном в секундах) для αv и αw. Более того, максимальные значения αv и αw возрастают на каждом полупериоде.
Радиус действия управления углом предпочтительно изначально близок к значению зоны видимости головки 2 самонаведения (и может, в частности, быть равным половине зоны видимости последней, например, 15°), обеспечивая схватывание большой угловой зоны без создания мертвой зоны в центре.
Период выбран в зависимости от необходимой длительности наблюдения в зоне для подтверждения обнаружения цели C и представлен только в качестве примера на фиг.2. Он может также постепенно увеличиваться с течением времени, предоставляя возможность увеличения реактивным снарядом 1 зоны поиска, если первый проход был неуспешным.
Настоящее изобретение, согласно которому увеличивается зона поиска, обеспечивает уменьшение воздействия как дрейфа навигационной системы, так и смещения цели C, а не только одного из этих двух факторов (что характерно для традиционных решений, описанных выше).
Более того, оно обеспечивает значительное преимущество, поскольку головка самонаведения, к которой было применено настоящее изобретение, показала характеристики захвата цели, эквивалентные характеристикам головки самонаведения с более высокими показателями (одинаковая дальность действия и точность, но зона видимости 48° вместо 33°).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ МНОГОЦЕЛЕВОГО ВЫСОКОТОЧНОГО ОРУЖИЯ ДАЛЬНЕЙ ЗОНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2399854C1 |
| УСТРОЙСТВО САМОНАВЕДЕНИЯ | 2008 |
|
RU2392575C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ПОРАЖЕНИЯ ПОДВИЖНОЙ ЦЕЛИ УПРАВЛЯЕМЫМ СНАРЯДОМ С АКТИВНОЙ СИСТЕМОЙ НАВЕДЕНИЯ И ДОРАЗГОННЫМ ДВИГАТЕЛЕМ | 1999 |
|
RU2151370C1 |
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| СПОСОБ УПРАВЛЕНИЯ КОРАБЕЛЬНЫМ КОМПЛЕКСОМ ОРУЖИЯ | 2013 |
|
RU2522356C1 |
| СПОСОБ ПОРАЖЕНИЯ ЦЕЛИ ВРАЩАЮЩИМСЯ БАЛЛИСТИЧЕСКИМ РЕАКТИВНЫМ СНАРЯДОМ | 1999 |
|
RU2158411C1 |
| Управляемый боеприпас | 2023 |
|
RU2836474C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы беспилотного летательного аппарата малой дальности с использованием интеллектуальной системы геопространственной информации | 2019 |
|
RU2722599C1 |
Изобретение относится к области авиационного приборостроения и может найти применение в системах автоматического управления реактивными снарядами. Технический результат - повышение эффективности систем самонаведения. Для этого реактивный снаряд (1) оснащен головкой (2) самонаведения с системой самонаведения на базе бесплатформенной навигационной системы, характеризующейся стадией захвата цели, в ходе которой она пытается обнаружить цель (C), и которая характеризуется направлением (3) визирования, причем указанное направление (3) визирования является фиксированным по отношению к реактивному снаряду (1) и направлено вдоль продольной оси (4) последнего, и указанный реактивный снаряд (1) дополнительно содержит средства (8) управления для осуществления автоматического управления указанным реактивным снарядом (1) таким образом, чтобы его продольная ось (4) во время полета в ходе стадии захвата головкой (2) самонаведения описывала окружность, радиус которой увеличивается во времени, пока цель (C) не будет обнаружена. 2 н. и 3 з.п. ф-лы, 2 ил.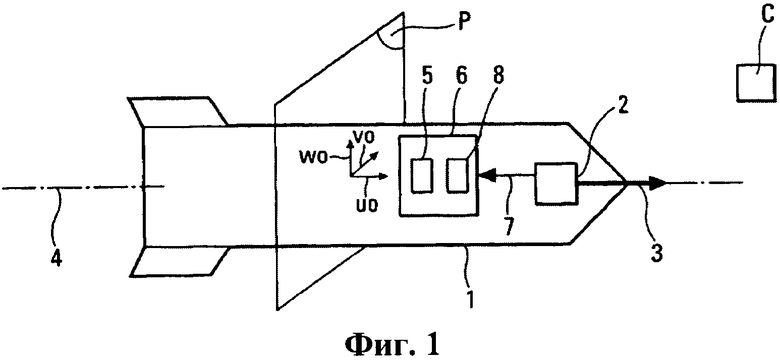
1. Способ автоматического управления головкой (2) системы самонаведения на базе бесплатформенной навигационной системы, установленной на реактивном снаряде (1), в частности на авиационной ракете, которая характеризуется стадией захвата цели, в ходе которой она пытается обнаружить цель (C), и которая характеризуется направлением (3) визирования, причем указанное направление (3) визирования является фиксированным по отношению к реактивному снаряду (1) и проходит вдоль продольной оси (4) последнего, отличающийся тем, что автоматическое управление реактивным снарядом (1) выполняют таким образом, чтобы продольная ось (4) реактивного снаряда (1) в ходе стадии захвата головкой (2) самонаведения описывала окружность, радиус которой увеличивается во времени, пока цель (C) не будет обнаружена.
2. Способ по п.1, отличающийся тем, что на реактивный снаряд (1) одновременно передают две команды, предназначенные для изменения, соответственно, с одной стороны, угла (αv) между вектором направления, связанным с продольной осью реактивного снаряда, и первой осью реактивного снаряда, и, с другой стороны, угла (αw) между указанным вектором направления и второй осью реактивного снаряда, причем эти две оси снаряда образуют плоскость (P), перпендикулярную продольной оси (4) реактивного снаряда (1), при этом эти две команды являются такими, что указанные изменения углов (αv, αw) являются синусоидальными и смещенными по фазе на π/2.
3. Реактивный снаряд, в частности авиационная ракета, содержащая головку (2) самонаведения системы самонаведения на базе бесплатформенной навигационной системы, которая характеризуется стадией захвата цели, в ходе которой она пытается обнаружить цель (C), и которая характеризуется направлением (3) визирования, причем направление (3) визирования является фиксированным по отношению к реактивному снаряду (1) и проходит вдоль продольной оси (4) последнего,
отличающийся тем, что содержит средства (8) автоматического управления для осуществления автоматического управления указанным реактивным снарядом (1) таким образом, чтобы продольная ось (4) указанного реактивного снаряда (1) во время полета последнего и в ходе стадии захвата головкой (2) самонаведения описывала окружность, радиус которой увеличивается во времени, пока цель (C) не будет обнаружена.
4. Реактивный снаряд по п.3, отличающийся тем, что средства (8) автоматического управления выполнены с возможностью передачи на реактивный снаряд (1) одновременно двух команд, предназначенных для изменения, соответственно, с одной стороны, угла (αv) между вектором направления, связанным с продольной осью реактивного снаряда, и первой осью реактивного снаряда, и, с другой стороны, угла (αw) между указанным вектором направления и второй осью реактивного снаряда, причем эти две оси снаряда образуют плоскость (P), перпендикулярную продольной оси (4) реактивного снаряда (1), при этом эти две команды являются такими, что указанные изменения углов (αv, αw) являются синусоидальными и смещенными по фазе на π/2.
5. Реактивный снаряд по п.3, отличающийся тем, что средства (8) автоматического управления являются частью системы (6) автоматического управления реактивного снаряда (1).
| US 4347996 А1, 07.09.1982 | |||
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ НА ВОЗДУШНУЮ ЦЕЛЬ (ВАРИАНТЫ) И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2253824C1 |
| DE 3602456 А, 30.07.1987 | |||
| Комбайн для добычи соли | 1978 |
|
SU714013A1 |
| КРЫЛАТАЯ РАКЕТА И СПОСОБ ЕЕ БОЕВОГО ПРИМЕНЕНИЯ (ВАРИАНТЫ) | 2002 |
|
RU2225975C1 |
| Справочник офицера противовоздушной обороны | |||
| Под ред | |||
| ЗИМИНА Г.В | |||
| - М.: Военное издательство, 1987, с.205, 206. | |||

