Аппарат ортопедический на голеностопный сустав относится к медицинской технике и предназначен для ортезирования детей при детском церебральном параличе (ДЦП), сопровождающимся деформацией стоп, патологическими установками, нефиксированными контрактурами голеностопного сустава, сочетающимися с патологией тазобедренных суставов, а также при ряде патологий опорно-двигательной системы на уровне дистальных отделов нижних конечностей.
Известен аппарат ортопедический на нижние конечности (патент РФ 2388435) позволяющий проводить лечение патологии тазобедренных суставов (прототип).
Аппарат состоит из раздвижной штанги, к концам которой присоединены посредством упругих элементов гильзы правого и левого бедра.
Опорно-двигательная система нижних конечностей представляет собой единую взаимосвязанную биомеханическую систему, определяющую всю схему построения нижних конечностей. Как показывает практика, патология тазобедренных суставов у детей с ДЦП сочетается с деформацией стоп, при этом последняя приводит к развитию различной степени нестабильности тазобедренных суставов.
Однако известный аппарат ортопедический на нижнюю конечность воздействует только на тазобедренный сустав, что не достаточно для комплексной реабилитации нижних конечностей, то есть имеет ограниченные показания к применению.
При этом сопутствующие деформации стоп не подвергаются воздействию. В известном изобретении раздвижение штанг осуществляется в недостаточно широких пределах. Штанги выполнены из стали, что утяжеляет конструкцию.
Пациент с врожденным вывихом бедра в известном аппарате может передвигаться, но никакого воздействия на пространственное положение деформированных стоп это устройство не оказывает, так как гильзами фиксируются только бедра.
Известная конструкция не может обеспечить устранение, сопутствующих патологии тазобедренных суставов деформаций стоп, требующих пространственного регулирования их взаимоположения.
Техническим решением поставленной задачи является создание аппарата ортопедического, позволяющего проводить одновременно лечение сочетанных патологий на уровне голеностопного и тазобедренного суставов и состоящего из раздвижной штанги, выполненной в виде двух стержней из титанового сплава, соединенных между собой направляющими механизмами, при этом к раздвижной штанге посредством крепежных элементов присоединены боковые раздвижные штанги, нижние концы которых соединены крепежными элементами с нижней раздвижной штангой, концы стержней которой имеют сферы из упругого полимерного материала, при этом сферы установлены на основании со сквозным крестообразным отверстием и зафиксированы на нем дугообразным кронштейном, присоединенным к основанию винтовой парой и крепежным болтом, при этом сферы, основания и дугообразные кронштейны образуют узлы пространственного регулирования, при чем каждое основание узлов пространственного регулирования присоединено посредством крепежных элементов к задней пяточной области участка гильз правой и левой стопы, а каждая гильза стопы посредством полимерных упругих шарниров, соединена с гильзой голени, причем гильзы голени и стопы выполнены в виде пространственной фигуры, обхватывающей голень и стопу и выполнены из термоформуемого композиционного материала.
Предложенная конструкция аппарата ортопедического позволяет проводить комплексное лечение детей, воздействуя на голеностопные и тазобедренные суставы, при этом эффект лечения осуществляется одновременно и на голеностопный, и на тазобедренный суставы, учитывая их биомеханическую взаимосвязь.
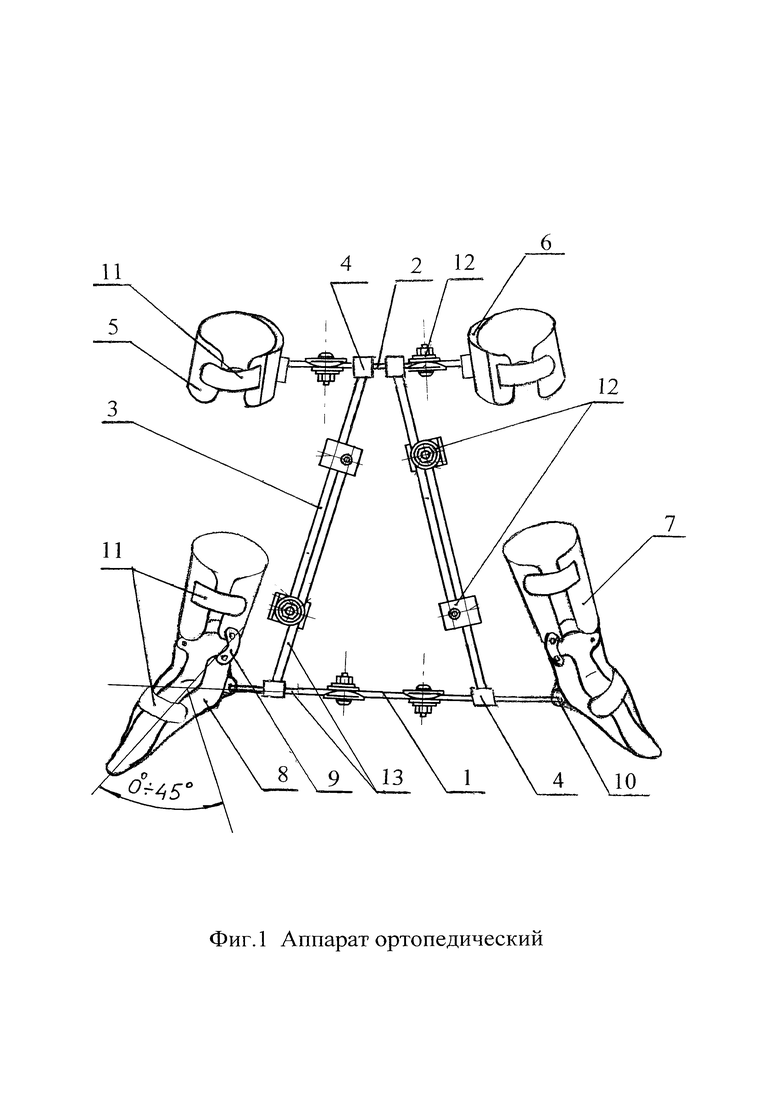
Аппарат ортопедический состоит из нижней раздвижной штанги 1, раздвижной штанги 2 и двух боковых раздвижных штанг 3, соединенные между собой посредством крепежных элементов 4, гильз правого и левого бедра 5 присоединенных посредством упругих элементов 6 к раздвижной штанге 2, гильз правой и левой голени 7, соединенных с гильзами стоп 8 при помощи упругих полимерных шарниров 9, а гильзы стоп 8, присоединены к узлам пространственного регулирования 10, которые соединены с концами стержней 22 нижней раздвижной штанги 1. Крепление ортопедического аппарата на пациенте осуществляется с помощью текстильных ворсовых застежек «Контакт» 11 (Фиг. 1).
Раздвижная штанга 2, нижняя раздвижная штанга 1 и две боковые раздвижные штанги 3 состоят каждая из двух стержней 13, соединенных между собой направляющим механизмом 12, который позволяет перемещать стержни относительно друг друга, изменяя расстояние между гильзами бедра, стопы и соответственно голени, а также между раздвижной штангой, нижней раздвижной штангой и двумя боковыми раздвижными штангами. Стержни всех штанг выполнены из титанового сплава, который обеспечивает легкость конструкции аппарата.
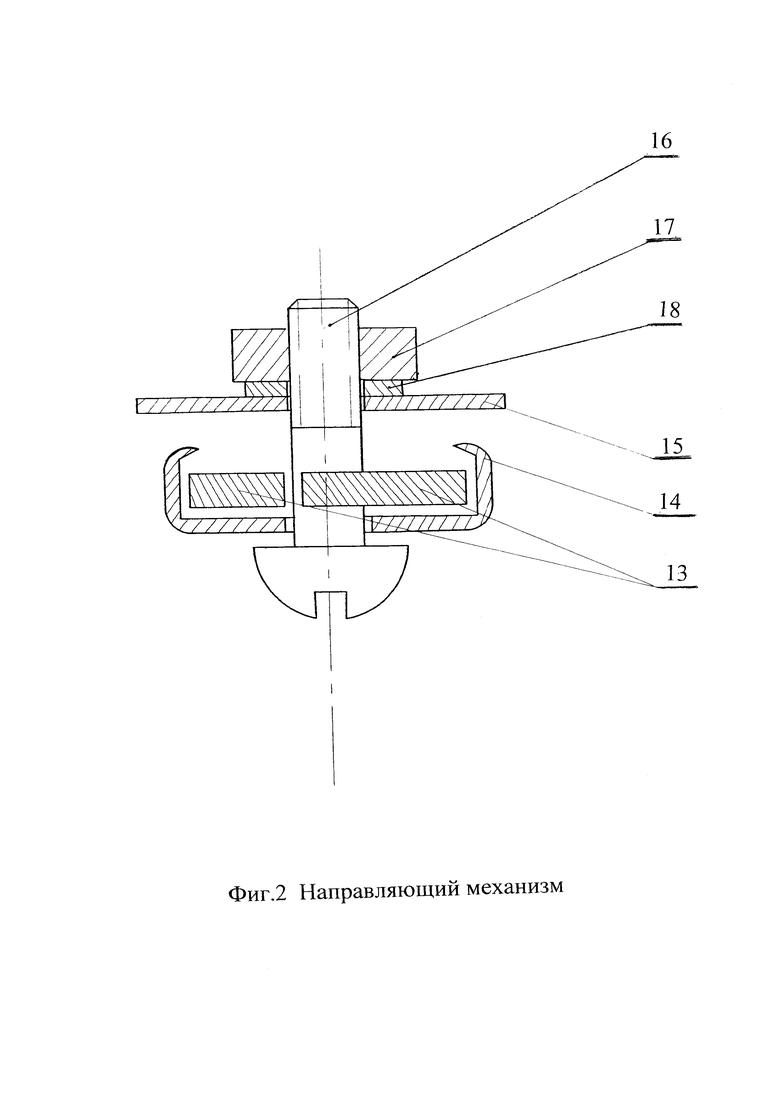
Направляющий механизм 12 состоит из скобы 14, ограничивающей шайбы 15, болта 16, гайки 17 и прокладки 18 (фиг. 2).
Положение стержней относительно друг друга фиксируется болтом 16 и гайкой 17. Скоба 14 ограничивает движение стержней и направляет их плоскопараллельное перемещение относительно друг друга. Для изменения расстояния между гильзами стоп, раскручивается гайка, воздействие ограничительной шайбы на штангу ослабевает, раскручиваются крепежные элементы 4, стержни передвигаются на заданную величину и новое положение нижней раздвижной штанги фиксируется гайкой 17. С целью обеспечения безопасности ребенка и невозможности откручивания крепежного механизма, на него одевается защитный колпачок, выполненный из эластомерного материала.
Гильзы голени, стопы и бедра изготовлены из композиционного материала на основе углеродной ткани, что облегчает вес аппарата. Композиционный материал, предназначенный для изготовления гильз голени и стопы, выполнен по определенной технологии и имеет разную жесткость. Разная жесткость гильз голени и стопы не только облегчает одевание аппарата, но и придает упругость гильзе стопы.
К концам стержней нижней раздвижной штанги 1 посредством узла пространственного регулирования 10 присоединены в пяточной области гильзы правой и левой стоп 8.
Узел пространственного регулирования состоит из: основания 19, с крестообразным отверстием 20, сферы 21, стержня 22 нижней раздвижной штанги 1, дугообразного кронштейна 23, соединенного с основанием посредством винтовой пары 24, крепежного болта 25 и отверстиями в основании под заклепки 26 (фиг. 3).
С помощью поворота сферы 21 относительно дугообразного кронштейна 23 и основания 19, при ослаблении болта 25 и последующей его фиксации, возможно устанавливать стопы ног относительно друг друга в трехмерном пространстве. Причем, положение стопы относительно сагиттальной плоскости, благодаря сферы, можно устанавливать в сегменте от 0 до 45° (Фиг. 1) в любом положении трехмерного пространства, в соответствии с показаниями врача-ортопеда.
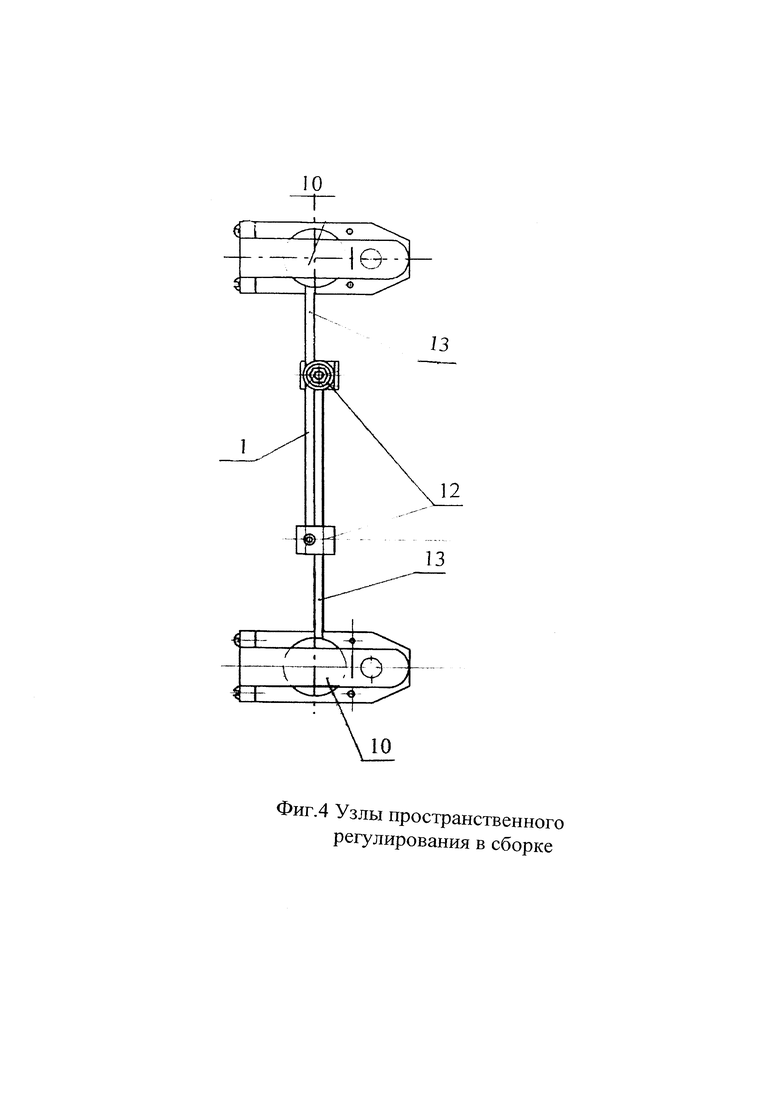
На фиг. 4 представлены узлы пространственного регулирования 10 в сборке с нижней раздвижной штангой 1, состоящей из двух стержней 13 и направляющими механизмами 12.
На фиг. 5 представлена сфера, установленная на стержне.
За счет оригинальной конструкции узла пространственного регулирования, имеется возможность устанавливать его либо на пяточную (фиг. 6, а, б), либо на подошвенную область гильз стоп (Фиг. 6,в), а гильзы голеней и стоп возможно изготавливать в виде единой оболочковой формы (фиг. 6,г), либо разъемными с применением в качестве соединительных ортопедического аппарата зависит от вида заболевания, возраста пациента и рекомендаций врача-ортопеда.
Изготовление ортопедического аппарата осуществляется в следующей последовательности.
Врач-ортопед осматривает пациента и определяет патологические установки нижних конечностей (стоп и тазобедренных суставов); дает рекомендации мастеру-ортезисту по виду ортопедического аппарата. В том случае, если необходимо сделать аппарат с гильзой голеностопного сустава, состоящей из двух оболочек - голени и стопы, мастер снимает слепки с бедра, голени и стопы, и, в соответствии со слепками, изготавливает гильзы. Одновременно собирают узел пространственного регулирования. Для этого в процессе изготовления, конец стержня помещается в литьевую форму и на его конце формуют, заливая полимерный материал, сферу; проводят полимеризацию. Аналогично формуют вторую сферу на стержне. Затем берут два стержня со сферами и свободные концы стержней устанавливают в направляющий механизм: откручивают гайку 17, снимают с болта прокладку 18 и ограничивающую шайбу 15. В скобу 14 устанавливают правый и левый свободные концы стержней 13, на болт одевают ограничивающую шайбу и прокладку. Стержни перемещают относительно друг друга на необходимую величину, определяемую врачом-ортопедом, и закрепляют гайкой 17. Гильзы голени соединяют с гильзами стоп полимерными шарнирами 9. Далее на пяточную область гильз стоп крепят основания узла пространственного регулирования 19. Затем сферу, с отрегулированной штангой, устанавливают на крестообразные отверстия 20 основания узла пространственного регулирования 19. К основанию прикрепляют дугообразный кронштейн 23, с помощью винтовой пары 24. Дугообразным кронштейном прижимают сферу к основанию и фиксируют (предварительно) его положение крепежным болта 25. После этого, в соответствии с рекомендациями врача-ортопеда, устанавливают гильзы стоп и окончательно закрепляют положение сферы крепежным болтом 25.
Раздвижную штангу 2 устанавливают по размерам, в соответствии с рекомендациями врача-ортопеда, таким же способом, как и нижнюю раздвижную штангу. На концы стержней раздвижной штанги 2 устанавливают, упругие элементы 6, к которым присоединяют гильзы правого и левого бедра 5. Затем, аналогично нижней раздвижной штанге, устанавливают размеры боковых раздвижных штанг и посредством крепежных элементов 4 их присоединяют к нижней раздвижной щтанге 1 и раздвижной штанге 2.
Аппарат одевается на пациента в следующей последовательности: сначала одевают гильзы на левое и правое бедро и закрепляют их текстильными застежками «Контакт». Затем ноги пациента помещают в гильзы голени и стопы, последние выставлены в необходимым медицинским показаниям положении, и закрепляют текстильными застежками «Контакт». За счет того, что гильзы голени и стопы выполнены из композиционного материала, имеющего разную жесткость, одевание аппарата не вызывает затруднений. При ходьбе возможны движения в голеностопных суставах, что облегчает передвижение пациента в аппарате.
Сущность изобретения состоит в том, что положение стопы относительно сагиттальной плоскости, благодаря функционированию узлов пространственного регулирования, можно устанавливать в сегменте от 0 до 45° в любом положении трехмерного пространства, в зависимости от вида патологической установки стопы и в соответствии с назначением врача-ортопеда.
Конструкция узла пространственного регулирования позволяет устанавливать его, либо на заднюю пяточную, либо на подошвенную область гильз стоп.
В процессе лечения возникает потребность в изменении положения стоп относительно друг друга и расстояния между гильзами бедра и гильзами стопы, что осуществляется, в предложенном изобретении, с помощью узла пространственного регулирования (изменение положения сферы при расфиксированном дугообразном кронштейне) и конструкции направляющих механизмов, по которым стержни штанг могут плоскопараллельно перемещаться относительно друг друга, а также за счет крепежных элементов. Параметры гильз стопы голени и бедра регулируются за счет текстильных ворсовых застежек и за счет формовки их конфигурации техническим электрофеном.
Таким образом, конструкция предложенного ортопедического аппарата позволяет не только не менять ортопедический аппарат на протяжении всего длительного периода лечения, но и осуществлять одновременную коррекцию патологического положения тазобедренных и голеностопных суставов, учитывая их биомеханическую взаимосвязь.
Аппарат ортопедический предназначен для лечения пациентов как в статике, например, в положении лежа или сидя, так и в динамике, при ходьбе.
Проведено ортезирование 10 детей в возрасте от 2 до 4 лет с поражениями нижних конечностей - эквинусная и плосковальгусная установки стоп в сочетании с односторонним и двусторонним поражениями тазобедренных суставов. Результаты ортезирования всех пациентов положительные. Наблюдалось улучшение рисунка ходьбы уже через месяц. У детей отмечалась нормализация биомеханических характеристик шага, формировалась направленная подвижность стопы в сагиттальной плоскости при ходьбе. Отмечалось улучшение движений и стабильности тазобедренных суставов. Ортезирование предлагаемым аппаратом позволило снизить на 20% продолжительность процесса лечения.
Заявляемое изобретение обладает следующими преимуществами:
- создан аппарат ортопедический, позволяющий осуществлять лечение детей при различных патологиях голеностопных суставов, характеризуемых супинацией, аддукцией и эквинусом стопы, а также при отвисании стопы в сочетании с патологиями тазобедренного сустава требующее пространственного регулирования взаиморасположения стоп;
- изобретена оригинальная конструкция узла пространственной регулировки, включающая сферу, выполненную из эластичного упругого полимерного материала, основание и дугообразный кронштейн, которая позволяет нижним конечностям принимать в трехмерном пространстве любое положение в объемном сегменте от 0 до 45°, в зависимости от назначения врача;
- облегчена конструкция ортопедического аппарата за счет изготовления гильз с применением композиционного материала на основе углеродных волокон и тканей, изготовления шарниров и сфер из эластичного упругого полимерного материала, а также стержней штанг из титанового сплава;
- предложена конструкция направляющего механизма для передвижения штанг относительно друг друга;
- создан ортопедический аппарат, конструкция которого позволяет на протяжении всего длительного периода лечения пользоваться одним изделием;
- создан универсальный ортопедический аппарат, так как узел пространственного регулирования может устанавливаться на гильзу стопы различных типоразмеров, как на заднюю пяточную, так и на подошвенную область гильзы стопы, в зависимости от назначения врача-ортопеда;
- повышен социальный эффект и снижены бюджетные затраты за счет сокращения продолжительности процесса лечения пациентов на 20%.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат ортопедический на всю ногу | 2018 |
|
RU2708841C1 |
| Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей | 2021 |
|
RU2807146C2 |
| АППАРАТ ОРТОПЕДИЧЕСКИЙ НА ГОЛЕНОСТОПНЫЙ СУСТАВ | 2016 |
|
RU2631103C2 |
| Ортез для гидрореабилитации детей со спастическими параличами | 2017 |
|
RU2651100C1 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| Способ изготовления гильз протезно-ортопедических изделий из композиционного материала | 2019 |
|
RU2725082C1 |
| ОРТЕЗ НА ГОЛЕНОСТОПНЫЙ СУСТАВ ДЛЯ ДЕТЕЙ С ПОСЛЕДСТВИЯМИ ДЦП | 2003 |
|
RU2320299C2 |
| Способ подбора протезно-ортопедического изделия для пациентов с поражением нижней конечности и ортопедический аппарат для его осуществления | 1990 |
|
SU1745235A1 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2006 |
|
RU2309709C1 |
| СПОСОБ РЕАЛИЗАЦИИ ЗАДНЕГО ТОЛЧКА ПРИ ОСЛАБЛЕНИИ МЫШЦ ДИСТАЛЬНОЙ ЧАСТИ НИЖНЕЙ КОНЕЧНОСТИ И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2092134C1 |


Изобретение относится к медицинской технике и предназначено для ортезирования детей при детском церебральном параличе (ДЦП), сопровождающимся деформацией стоп, патологическими установками, нефиксированными контрактурами голеностопного сустава, сочетающимися с патологией тазобедренных суставов, а также при ряде патологий опорно-двигательной системы на уровне дистальных отделов нижних конечностей. Аппарат ортопедический состоит из раздвижной штанги, к концам которой присоединены посредством упругих элементов гильзы правого и левого бедра. Раздвижная штанга выполнена в виде двух стержней из титанового сплава, соединенных между собой направляющими механизмами. К штанге посредством крепежного соединения присоединены боковые раздвижные штанги, нижние концы которых соединены крепежными элементами с нижней раздвижной штангой, концы стержней которой имеют сферы из упругого полимерного материала. Сферы установлены на основании со сквозным крестообразным отверстием и зафиксированы на нем дугообразным кронштейном, присоединенным к основанию винтовой парой и крепежным болтом. Сферы, основания и дугообразные кронштейны образуют узлы пространственного регулирования. Каждое основание узлов пространственного регулирования присоединено посредством крепежных элементов к задней пяточной области участка гильз правой и левой стопы. Каждая гильза стопы посредством полимерных упругих шарниров соединена с гильзой голени. Гильзы голени и стопы выполнены в виде пространственной фигуры, обхватывающей голень и стопу, и выполнены из термоформуемого композиционного материала. Изобретение позволяет проводить комплексное лечение детей, воздействуя на голеностопные и тазобедренные суставы, при этом эффект лечения осуществляется одновременно и на голеностопный, и на тазобедренный суставы, учитывая их биомеханическую взаимосвязь. 5 ил.
Аппарат ортопедический, состоящий из раздвижной штанги, к концам которой присоединены посредством упругих элементов гильзы правого и левого бедра, отличающийся тем, что раздвижная штанга выполнена в виде двух стержней из титанового сплава, соединенных между собой направляющими механизмами, при этом к штанге посредством крепежного соединения присоединены боковые раздвижные штанги, нижние концы которых соединены крепежными элементами с нижней раздвижной штангой, концы стержней которой имеют сферы из упругого полимерного материала, при этом сферы установлены на основании со сквозным крестообразным отверстием и зафиксированы на нем дугообразным кронштейном, присоединенным к основанию винтовой парой и крепежным болтом, при этом сферы, основания и дугообразные кронштейны образуют узлы пространственного регулирования, причем каждое основание узлов пространственного регулирования присоединено посредством крепежных элементов к задней пяточной области участка гильз правой и левой стопы, а каждая гильза стопы посредством полимерных упругих шарниров соединена с гильзой голени, причем гильзы голени и стопы выполнены в виде пространственной фигуры, обхватывающей голень и стопу, и выполнены из термоформуемого композиционного материала.
| АППАРАТ ОРТОПЕДИЧЕСКИЙ НА НИЖНИЕ КОНЕЧНОСТИ | 2008 |
|
RU2388435C2 |
| Способ разгрузки линии электропередачи двумя ступенями | 1961 |
|
SU143092A1 |
| Антенна с приспособлением для настройки на соответствующую длину волны | 1928 |
|
SU13306A1 |
| WO 00/062721 A1, 26.10.2000 | |||
| US 4576151 A, 18.03.1986 | |||
| СПОСОБ ИДЕНТИФИКАЦИИ НЕФТЕПРОМЫСЛОВОГО ОБОРУДОВАНИЯ | 2013 |
|
RU2514870C1 |

