Изобретение относится к области систем дифференциальной коррекции и касается обеспечения эффективности и доступности спутниковых навигационных систем.
В частности, изобретение касается восходящей связи между несколькими наземными навигационными станциями и спутником, предназначенным для передачи навигационных данных. В частности, объектом изобретения является цифровая и полупрозрачная навигационная полезная нагрузка для такого спутника.
В дальнейшем тексте описания будут использованы следующие англо-саксонские аббревиатуры, хорошо известные в данной области. Спутниковые системы навигации и позиционирования обычно обозначают термином «система GNSS» (Global Navigation Satellite System). Системы дифференциальной коррекции характеристик называют системами SBAS (Satellite Based Augmentation Systems). Наземные станции, предназначенные для передачи данных дифференциальной коррекции на спутник, называют станциями NLES (Navigation Land Earth Stations). Наземные станции, предназначенные для приема спутниковых сигналов, содержащих данные дифференциальной коррекции, и для осуществления измерений на этих сигналах, принято называть станциями RIMS (Ranging & Integrity Monitoring Station).
Известные системы дифференциальной коррекции SBAS позволяют выдавать в режиме реального времени поправки в приемники GNSS, в частности, с целью повышения точности осуществляемой геолокализации. Они обеспечивают также трансляцию информации, служащей для улучшения полноты обслуживания, обеспечиваемого системой. Как правило, поправки и другие данные, генерируемые и передаваемые такими системами, называют данными дифференциальной коррекции и передают в виде сообщений дифференциальной коррекции непосредственно в навигационном сигнале.
Для выработки и передачи таких данных системы SBAS обычно включают в себя наземные станции RIMS, которые непрерывно замеряют сигналы GNSS, передаваемые навигационными спутниками, центры обработки, которые получают эти измерения и вырабатывают сообщения дифференциальной коррекции, и наземные станции NLES, которые передают эти сообщения с навигационным сигналом GNSS на спутник дифференциальной коррекции SBAS, который выполняет функцию ретранслятора, передавая принятый сигнал на приемники GNSS. В такой системе полезную нагрузку спутника SBAS называют прозрачной, то есть на борту спутника не происходит никакой обработки, приводящей к изменению принятого сигнала.
Такие системы характеризуются ограничениями, касающимися доступности и непрерывности их работы, которые можно гарантировать только за счет повышения сложности системы, в частности, за счет резервирования некоторых приборов.
Поскольку полезная нагрузка спутника SBAS является прозрачной, она не обеспечивает одновременного доступа к своим ресурсам. Применение горячего резервирования между наземной станцией NLES и резервной запасной станцией NLES не представляется возможным, поскольку спутник SBAS может только принимать и ретранслировать сигнал номинальной мощности, одновременно передаваемый только одной станцией NLES, называемой главной или номинальной станцией.
Выражение «горячее резервирование» применяют относительно системы, в которой, по меньшей мере, две наземные станции NLES могут одновременно передавать сигнал по восходящему каналу связи в направлении от земли к спутнику SBAS. Соответственно, о холодном резервировании говорят, когда доступны, по меньшей мере, две станции для передачи навигационного сигнала в направлении спутника SBAS, но передают они не одновременно. При обнаружении неисправности на номинальной станции NLES запускают запасную станцию NLES, которая по умолчанию не является активной, чтобы обеспечить переключение станций и продолжить обслуживание. Время, необходимое для запуска запасной станции, приводит к потере непрерывности и к соответствующему прерыванию обслуживания, которое может превышать одну минуту. Это время прерывания связано также со следующими видами обработки, необходимыми для восстановления связи: обнаружение неисправности, переключение на резервную станцию NLES, стабилизация контуров автоматического согласования станцией, обеспечение требуемого уровня целостности.
Другой проблемой, связанной с прозрачностью спутника SBAS, является целостность навигационного сообщения, принимаемого этим спутником. В известных технических решениях применяют контроль целостности сигналов на уровне наземных станций NLES. Этот контроль осуществляют посредством сравнения навигационного сигнала, передаваемого по восходящему каналу связи, с сигналом, передаваемым спутником SBAS по нисходящему каналу связи и улавливаемым станциями NLES.
Обнаружение возможного зашумления или искажения навигационных сигналов происходит на земле и приводит либо к трансляции специального тревожного сообщения, которое не является моментальным, либо к прекращению передачи со станции NLES. На уровне самого спутника SBAS невозможна никакая блокировка трансляции искаженного сигнала, если только не предпринять отключение полезной нагрузки при помощи дистанционного управления с земли. Этот тип работы приводит к потере доступности для приемников GNSS, которые должны ожидать передачу от спутника нового достоверного сигнала.
Третья проблема состоит в использовании нескольких частотных диапазонов для передачи навигационных сигналов станциями NLES. Например, системы GPS могут использовать три частотных поддиапазона в диапазоне L, то есть диапазоны L1, L2 и L5 для разных назначений. Точно так же, европейская система Galileo предусматривает использование четырех частотных поддиапазонов. Кроме того, оперативное обслуживание системы может потребовать передачи тестовых сигналов.
Передачу сигналов по восходящей линии связи между станцией NLES и спутником классически осуществляют по частотному плану типа FDMA и при единой поляризации. Это значит, что каждый сигнал передают в соответствующем ему частотном диапазоне (L1, L2, L5, …). Наличие множества каналов может, таким образом, привести к очень большой спектральной занятости и к увеличению сложности наземных станций и полезной нагрузки.
На борту спутника полезная нагрузка предусматривает несколько каналов обработки, адаптированных для каждого частотного диапазона. Передача сигналов, по меньшей мере, в двух разных частотных диапазонах приводит к дифференциальной дисперсии по коэффициенту усиления и фазе между навигационными каналами, связанными с этими разными частотами. Действительно, канал распространения наводит различные возмущения (шум, влияние ионосферы) в зависимости от частоты передачи. Следовательно, сигналы необходимо корректировать по амплитуде, по временной задержке и по фазе, чтобы компенсировать эти дифференциальные погрешности. Кроме того, трудности согласования и калибровки каналов приводят к плохому одновременному контролю сигналов, передаваемых в двух или нескольких разных частотных диапазонах, что приводит к ухудшению характеристик для пользователя системы.
Настоящее изобретение призвано решить проблему вышеуказанных ограничений известных систем SBAS и предложить для спутника SBAS полезную и полупрозрачную полезную нагрузку, то есть нагрузку, которая позволяет выполнять задачу спутника прозрачной ретрансляции навигационных сообщений и сообщений дифференциальной коррекции и одновременно вводить некоторые специфические виды обработки на уровне спутника, позволяющие повысить безопасность, обеспечить непрерывность обслуживания, контроль за целостностью, а также эффективность радиообмена.
В связи с этим объектом изобретения является полезная нагрузка для спутника дифференциальной коррекции, содержащая входной канал, предназначенный для приема навигационных сигналов, передаваемых, по меньшей мере, одной наземной навигационной станцией в первом частотном диапазоне, и множество выходных каналов, каждый из которых предназначен для трансляции навигационных сигналов в частотном диапазоне, отличном от упомянутого первого диапазона и от других диапазонов трансляции, отличающаяся тем, что дополнительно содержит навигационный процессор, выполненный с возможностью исполнения следующих операций для каждого из принятых сигналов:
- на основании первого набора кодов расширения, каждый из которых связан с одной наземной навигационной станцией, и для каждого из упомянутых кодов сигнал сужают по фазе, чтобы выделить контрольный сигнал,
- производят аутентификацию упомянутого контрольного сигнала и на ее основании определяют станцию, передающую упомянутый сигнал,
- если аутентификация оказалась отрицательной, блокируют упомянутый навигационный сигнал,
- измеряют отношение сигнала к шуму и помехам, влияющее на упомянутый контрольный сигнал,
- среди принятых навигационных сигналов оставляют сигнал, который имеет наибольшее отношение сигнала к шуму и помехам и для которого аутентификация является положительной, при этом упомянутый оставляемый сигнал называют номинальным сигналом, при этом станцию, передающую номинальный сигнал, называют номинальной станцией, при этом другие передающие станции называют резервными станциями,
- на основании второго набора кодов расширения, каждый из которых связан с одним типом навигационного сигнала, предназначенного для передачи в одном из частотных диапазонов трансляции, и для каждого из упомянутых кодов номинальный навигационный сигнал сужают по квадратуре,
- упомянутый навигационный сигнал передают в частотном диапазоне трансляции, связанном с используемым кодом расширения.
Согласно частному аспекту изобретения упомянутый контрольный сигнал является предварительно демодулируемым в соответствии с модуляцией типа «Cyclic Code Shift Keying», при этом аутентификацию контрольного сигнала производят, идентифицируя код, связанный с упомянутой модуляцией.
Объектом изобретения является также полезная нагрузка для спутника дифференциальной коррекции, содержащая входной канал, предназначенный для приема навигационных сигналов, передаваемых, по меньшей мере, одной наземной навигационной станцией в первом частотном диапазоне, и множество выходных каналов, каждый из которых предназначен для трансляции навигационных сигналов в частотном диапазоне, отличном от упомянутого первого диапазона и от других диапазонов трансляции, отличающаяся тем, что дополнительно содержит навигационный процессор, выполненный с возможностью исполнения следующих операций для каждого из принятых сигналов:
- упомянутый принятый сигнал демодулируют в соответствии с модуляцией типа «Cyclic Code Shift Keying»,
- производят аутентификацию принятого сигнала, идентифицируя код, связанный с упомянутой модуляцией, и на ее основании определяют станцию, передающую упомянутый сигнал,
- если аутентификация оказалась отрицательной, блокируют упомянутый навигационный сигнал,
- измеряют отношение сигнала к шуму и помехам, влияющее на упомянутый принятый сигнал,
- среди принятых навигационных сигналов оставляют сигнал, который имеет наибольшее отношение сигнала к шуму и помехам и для которого аутентификация является положительной, при этом упомянутый оставляемый сигнал называют номинальным сигналом, при этом станцию, передающую номинальный сигнал, называют номинальной станцией, при этом другие передающие станции называют резервными станциями,
- на основании набора кодов расширения, каждый из которых связан с одним типом навигационного сигнала, предназначенного для передачи в одном из частотных диапазонов трансляции, и для каждого из упомянутых кодов номинальный навигационный сигнал сужают по квадратуре,
- упомянутый номинальный навигационный сигнал передают в частотном диапазоне трансляции, связанном с используемым кодом расширения.
Согласно частному аспекту изобретения, если отношение сигнала к шуму и помехам, измеренное на упомянутом номинальном сигнале, уменьшается ниже заранее определенного порога, новым оставляемым номинальным сигналом является сигнал, имеющий наибольшее отношение сигнала к шуму и помехам.
В варианте выполнения полезная нагрузка в соответствии с изобретением дополнительно содержит обратный канал, предназначенный для трансляции в упомянутом первом частотном диапазоне, по меньшей мере, одного служебного сигнала, по меньшей мере, на одну наземную навигационную станцию, при этом упомянутый служебный сигнал содержит, по меньшей мере, измерение отношения сигнала к шуму и помехам, по меньшей мере, номинального сигнала, при этом упомянутый служебный сигнал предназначен для реализации автоматического регулирования мощности передачи упомянутых резервных станций по мощности передачи номинальной станции.
Согласно частному аспекту изобретения упомянутый служебный сигнал дополнительно содержит измерение отношения сигнала к шуму и помехам навигационных сигналов, принятых спутником и переданных всеми передающими станциями.
Согласно частному аспекту изобретения упомянутый служебный сигнал дополнительно содержит измерение временных задержек между приемом спутником номинального сигнала, с одной стороны, и сигналами, переданными резервными наземными навигационными станциями, при этом упомянутый служебный сигнал предназначен для синхронизации во времени упомянутых станций между собой.
Согласно частному аспекту изобретения упомянутый обратный канал дополнительно предназначен для трансляции номинального навигационного сигнала в упомянутом первом частотном диапазоне.
Согласно частному аспекту изобретения упомянутый первый частотный диапазон является диапазоном С или Ku, и упомянутые частотные диапазоны трансляции являются, по меньшей мере, диапазонами L1 и L5.
Согласно частному аспекту изобретения упомянутые коды расширения являются кодами Уолша.
Объектом изобретения является также спутник дифференциальной коррекции, содержащий полезную нагрузку в соответствии с изобретением, предназначенную для приема навигационного сигнала по восходящей линии связи в первом частотном диапазоне и для ретрансляции упомянутого сигнала по нисходящей линии связи в множестве частотных диапазонов трансляции.
Объектом изобретения является наземная навигационная станция, выполненная с возможностью приема сообщения дифференциальной коррекции и для генерирования навигационного сигнала, содержащего упомянутое сообщение, при этом упомянутый навигационный сигнал спектрально расширяют при помощи первого кода расширения, связанного с его частотным диапазоном трансляции, при этом упомянутый навигационный сигнал передают по восходящей линии связи в первом частотном диапазоне, отличном от частотного диапазона трансляции.
Согласно частному аспекту наземной навигационной станции в соответствии с изобретением к упомянутому навигационному сигналу добавляют по квадратуре контрольный сигнал, спектрально расширенный при помощи второго кода расширения, связанного с упомянутой наземной навигационной станцией.
Согласно частному аспекту наземной навигационной станции в соответствии с изобретением к упомянутому навигационному сигналу или к упомянутому контрольному сигналу предварительно применяют модуляцию типа «Cyclic Code Shift Keying».
Согласно частному аспекту наземной навигационной станции в соответствии с изобретением поляризация передаваемого навигационного сигнала отличается в зависимости от частотного диапазона трансляции.
Объектом изобретения является также система дифференциальной коррекции, содержащая:
- по меньшей мере, одну станцию наблюдения, выполненную с возможностью приема радионавигационного сигнала, переданного, по меньшей мере, одним радионавигационным спутником, и для осуществления измерений на упомянутом сигнале,
- по меньшей мере, один центр обработки, выполненный с возможностью приема упомянутых измерений, переданных, по меньшей мере, одной станцией измерения, и для формирования, по меньшей мере, одного сообщения дифференциальной коррекции на основании упомянутых измерений,
- множество наземных навигационных станций в соответствии с изобретением,
- по меньшей мере, один спутник дифференциальной коррекции в соответствии с изобретением.
В частном варианте выполнения система дифференциальной коррекции в соответствии с изобретением выполнена с возможностью применения переключения наземных навигационных станций типа горячего резервирования.
В частном варианте выполнения поляризация передаваемого навигационного сигнала отличается между двумя резервными наземными навигационными станциями.
В частном варианте выполнения при приеме служебного сигнала, переданного упомянутым спутником дифференциальной коррекции и содержащего, по меньшей мере, измерение отношения сигнала к шуму и помехам, по меньшей мере, упомянутого номинального сигнала, упомянутые наземные навигационные станции осуществляют автоматическое регулирование своей мощности передачи по мощности передачи номинальной станции.
В частном варианте выполнения при приеме упомянутого служебного сигнала упомянутые наземные навигационные станции осуществляют синхронизацию во времени своих соответствующих передач.
Другие признаки и преимущества изобретения будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, на которых:
Фиг.1 - структурная схема архитектуры известной системы SBAS.
Фиг.2 - функциональная схема известной полезной нагрузки спутника SBAS.
Фиг.3 - схема, иллюстрирующая генерирование сигнала восходящей связи между станцией NLES и спутником SBAS, согласно известным техническим решениям.
Фиг.4а - схема, иллюстрирующая генерирование навигационных сигналов станцией NLES в соответствии с изобретением.
Фиг.4b - версия варианта выполнения, показанного на фиг.4а.
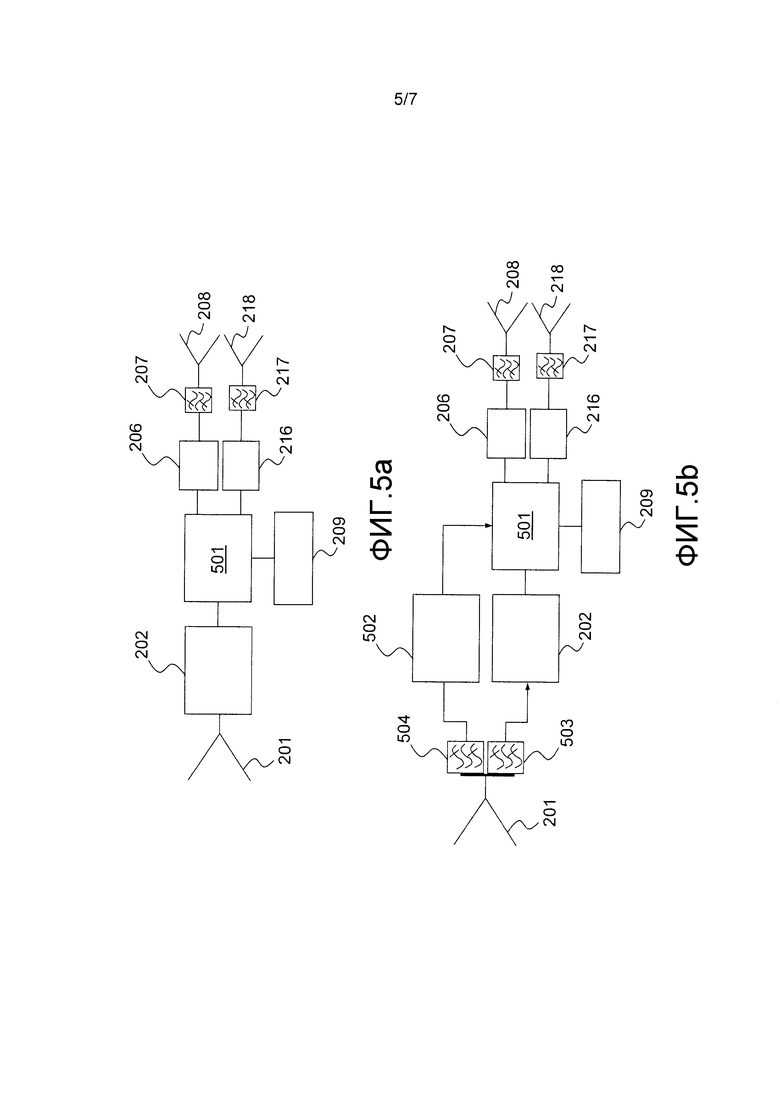
Фиг.5а - функциональная схема полезной нагрузки спутника SBAS в соответствии с изобретением в первом варианте выполнения.
Фиг.5b - функциональная схема полезной нагрузки спутника SBAS в соответствии с изобретением во втором варианте выполнения.
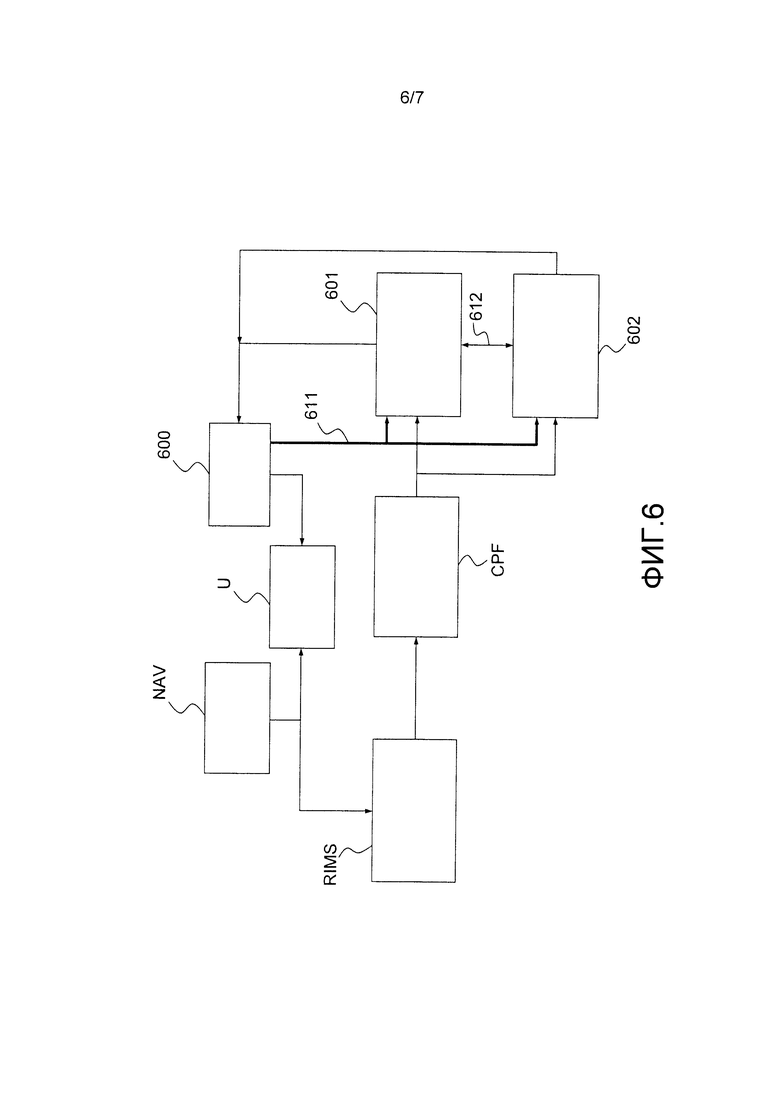
Фиг.6 - структурная схема архитектуры системы SBAS в соответствии с изобретением во втором варианте выполнения полезной нагрузки.
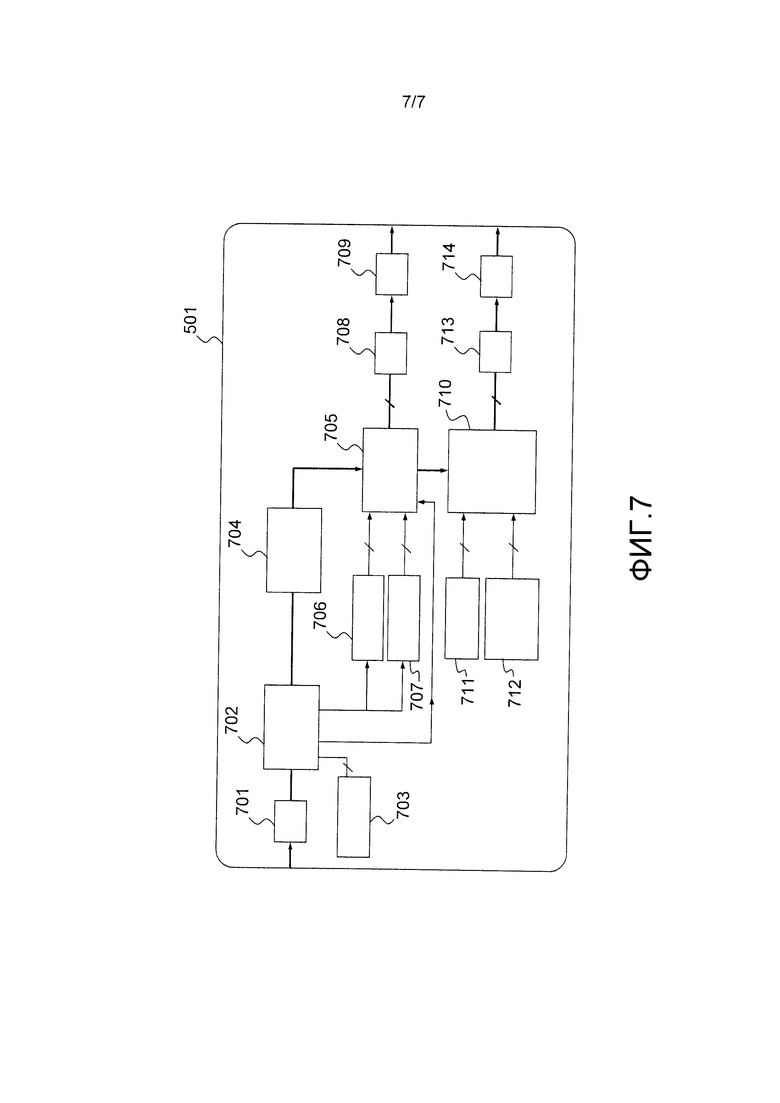
Фиг.7 - функциональная схема навигационного процессора в соответствии с изобретением.
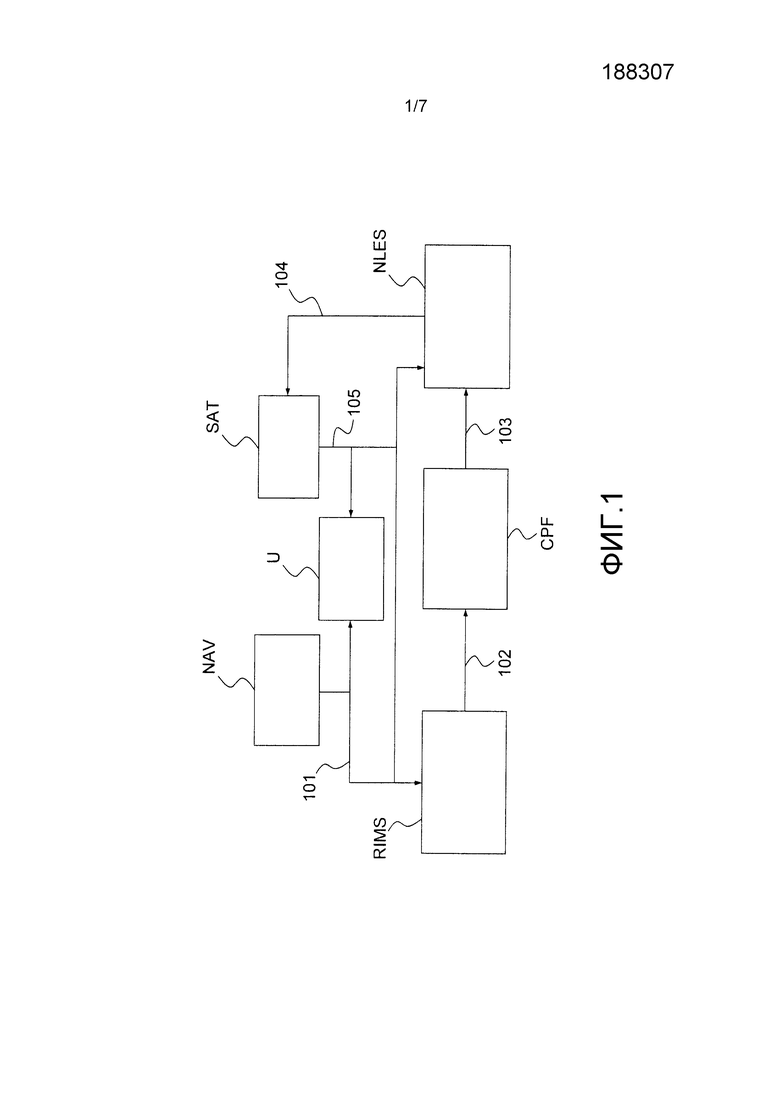
На схеме, представленной на фиг.1, схематично показана общая архитектура известной системы SBAS. Такая система выполнена с возможностью выработки данных дифференциальной коррекции на основании измерений, произведенных на навигационных сигналах 101, передаваемых множеством радионавигационных спутников NAV. Измерения и данные от радионавигационных спутников NAV поступают во множество станций наблюдения RIMS, затем с заданной периодичностью передаются 102 во множество центров обработки CPF. На основании принятых измерений эти центры производят оценку дифференциальных поправок с целью их применения к радионавигационному сигналу, затем формируют сообщения дифференциальной коррекции, которые включают в себя эти поправки и которые впоследствии передаются 103 на наземную навигационную станцию NLES. Станция NLES принимает сообщения дифференциальной коррекции и передает 104 их на спутник дифференциальной коррекции SAT для последующей трансляции 105 пользователям U и на наземные станции RIMS, NLES. Для этого, аналогично навигационным сообщениям, эти сообщения дифференциальной коррекции включают в навигационный сигнал, совместимый с системой GNSS. Таким образом, навигационный сигнал, сгенерированный станцией NLES и затем переданный спутником SAT, содержит одновременно навигационные сообщения и сообщения дифференциальной коррекции, которые могут быть использованы приемниками GNSS для повышения эффективности локализации. Спутник дифференциальной коррекции может быть геостационарным спутником или спутником на высокой орбите НЕО, или спутником на наклонной геостационарной орбите типа IGSO (Inclined Geosynchronous Satellite Orbit). Станция NLES осуществляет контроль соответствия принимаемых сообщений, переданных центрами обработки CPF, с сообщениями, передаваемыми спутником SAT дифференциальной коррекции по нисходящей линии связи. Сигнал, ретранслируемый спутником SAT дифференциальной коррекции, принимается также станциями RIMS. Центр обработки CPF может обратиться ко второй резервной станции NLES в случае неисправности главной станции NLES, но это резервирование является резервированием холодного типа, то есть резервная станция NLES отключена, когда главная станция осуществляет передачу. Восходящий канал связи между станцией NLES и спутником SAT дифференциальной коррекции работает в диапазоне Ku или в диапазоне С. Нисходящий канал связи между спутником SAT дифференциальной коррекции и станцией RIMS или пользователем U работает в диапазоне L для передачи навигационного сигнала.
Кроме того, некоторые известные системы дифференциальной коррекции, такие как европейская система EGNOS, используют обратный канал в диапазоне Ku или в диапазоне С между спутником SAT дифференциальной коррекции и наземными станциями NLES, позволяющий производить двухчастотную оценку (Ku или C и L) физических параметров спутниковой связи. Этот обратный канал служит только для автоматического согласования времени передачи спутника через длинный цикл. Чтобы точно синхронизировать время передачи навигационного сигнала спутником SAT дифференциальной коррекции, наземные станции NLES ускоряют или задерживают передачу своего сигнала по восходящему каналу связи, чтобы синхронизировать спутник со стационарными часами.
Когда ни один обратный канал не доступен, автоматическое регулирование по времени можно также осуществлять через навигационный сигнал, передаваемый пользователям в диапазоне L, но со специальным кодом PRN, специфическим для тестовых процедур, который, таким образом, будет не известным для пользователей.
Схема на фиг.1 иллюстрирует только один блок, входящий в состав системы, однако в реальности она содержит несколько спутников SAT дифференциальной коррекции, несколько станций наблюдения RIMS, несколько центров обработки CPF и несколько передающих станций NLES. Как правило, для одного спутника дифференциальной коррекции используют две передающие станции NLES (номинальную и резервную).
При неисправности одной станции NLES производят переключение на резервную станцию NLES, что приводит к прерыванию сигнала, передаваемого по восходящему каналу связи, на несколько секунд. Восстановление передачи пригодного для использования сигнала приводит к дополнительной задержке на несколько десятков секунд, а полное восстановление системы занимает примерно минуту. Эта потеря непрерывности обслуживания особенно влияет на сферы, требующие непрерывной доступности, такие как область авиации. Для пользователей, находящихся в секторе охвата только одного спутника дифференциальной коррекции, она приводит к полной остановке обслуживания, а для других требует переключения на другой спутник. Кроме того, даже при восстановлении обслуживания контур контроля целостности, который позволяет гарантировать целостность передаваемых сообщений, не становится сразу же рабочим, пока наземные станции не примут новый сигнал, передаваемый спутником. В этом случае на нисходящей линии связи контроль целостности системы перестает быть эффективным, и нарушение этой нисходящей линии связи может затронуть обширную региональную зону, оставаясь незамеченным со стороны системы.
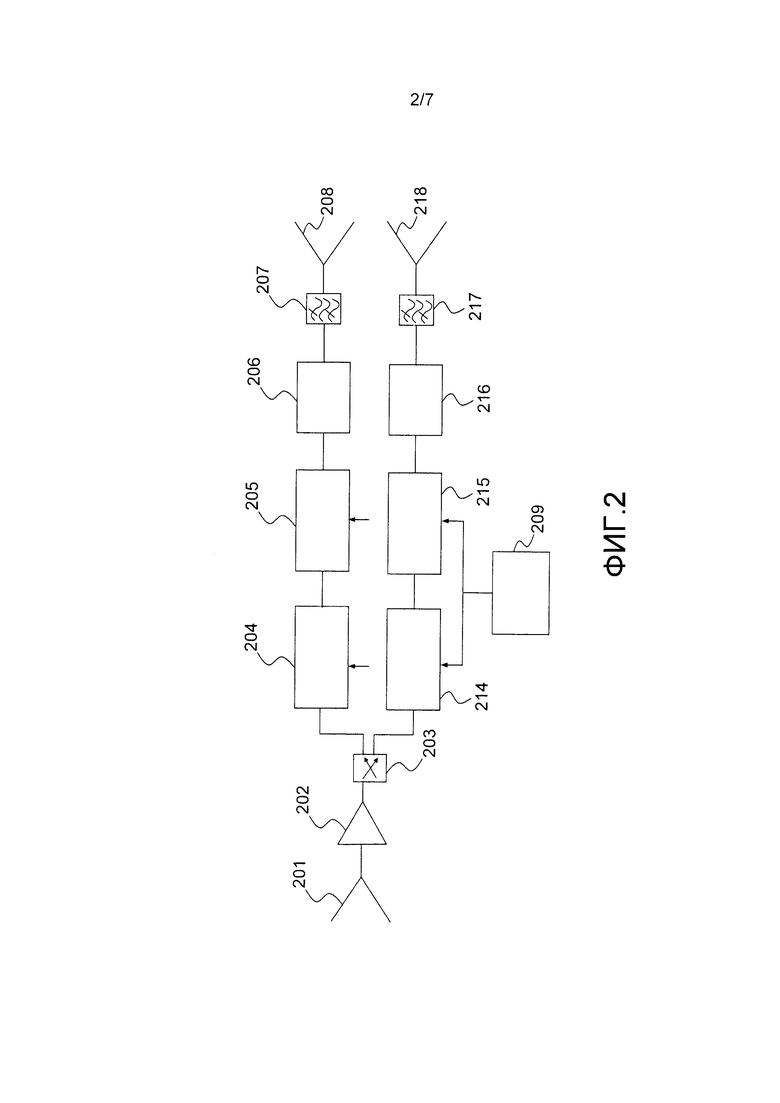
На фиг.2 представлена структурная схема основных функций полезной нагрузки известного спутника SBAS дифференциальной коррекции. Сигналы, передаваемые станцией NLES, поступают на вход 201, предназначенный для приема сигналов в диапазоне С или в диапазоне Ku, усиленных усилителем 202 с низким уровнем шума, затем направляются через распределитель 203 в канал частотной конверсии в одном из поддиапазонов диапазона L, используемых системой GNSS. На схеме фиг.2 показаны два канала конверсии, позволяющие преобразовать сигнал в диапазоне L1 или в диапазоне L5 для его ретрансляции в направлении пользователей системы GNSS.
Канал конверсии содержит первое устройство 204, 214 преобразования частоты в промежуточную частоту, второе устройство 205, 215 преобразования частоты в частоту в диапазоне L1 или L5, местный контрольный гетеродин 209, усилитель 206, 216, полосовой фильтр 207, 217 и выход 208, 218, выполненный с возможностью передачи сигналов в диапазоне L1 или L5.
Такую полезную нагрузку называют прозрачной, так как она не производит никакой специальной обработки на принимаемом сигнале, кроме обработки, необходимой для преобразования частоты по диапазону пользователя. Таким образом, принимаемые спутником сигналы всегда ретранслируются на землю без контроля их целостности на этом уровне. Кроме того, такая полезная нагрузка содержит только аналоговые схемы, и адаптация по двум частотным диапазонам пользователя требует дублирования канала частотной конверсии, что является недостатком. Оба канала должны соответствовать друг другу по амплитуде, фазе и дифференциальным задержкам.
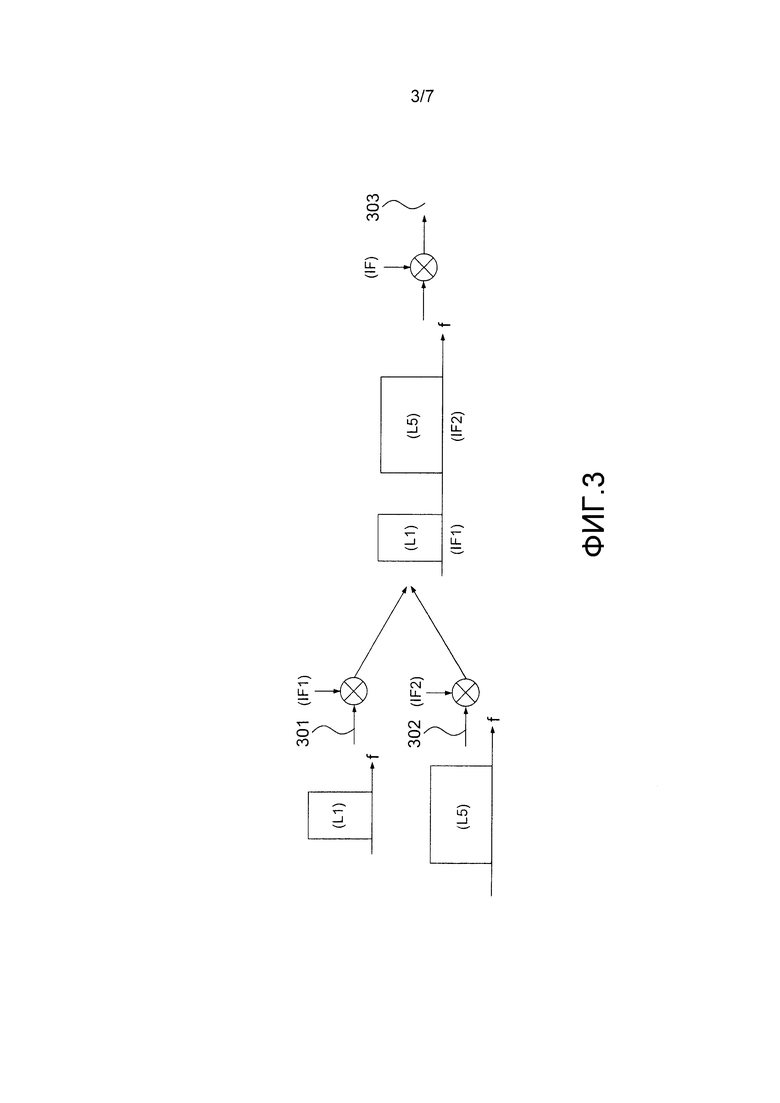
На фиг.3 схематично представлено генерирование сигнала, передаваемого по каналу восходящей связи между известной станцией NLES и спутником SAT. Передаваемый сигнал 301, 302 сначала преобразуют по частоте L1 или L5 в соответствии с частотным диапазоном конечного пользователя. Для этого применяют два местных гетеродина IF1, IF2. Получаемый в результате сигнал соответствует частотному плану типа FDMA, затем его преобразуют по диапазону С или Ku при помощи третьего местного гетеродина IF. Таким образом, ширина частотного диапазона навигационного сигнала пропорциональна числу предназначенных для передачи сигналов дифференциальной коррекции.
Задачей изобретения является, в частности, устранение недостатков известных систем, описанных со ссылками на фиг.1, 2 и 3.
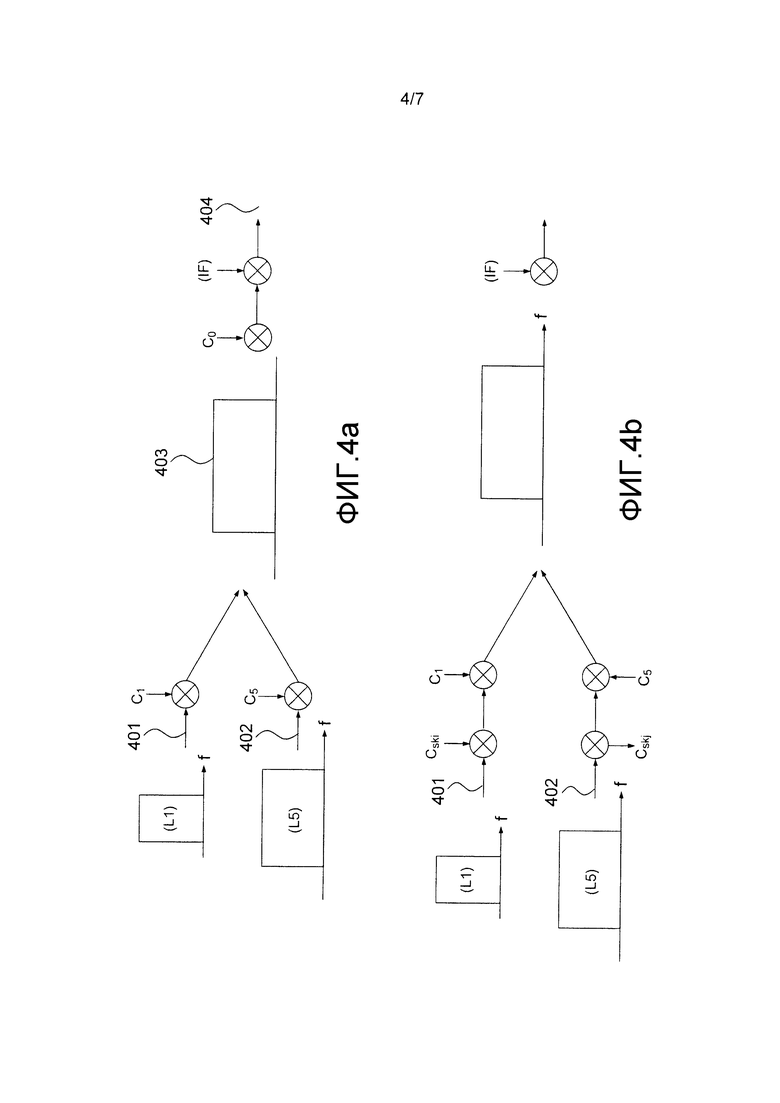
Схема на фиг.4а иллюстрирует изменение в соответствии с изобретением сигнала, передаваемого станцией NLES в направлении спутника SAT дифференциальной коррекции. Для упрощения описания представлен только случай двух навигационных сигналов, содержащих сообщения дифференциальной коррекции и предназначенных для передачи в двух разных диапазонах L1, L5.
Каждый передаваемый навигационный сигнал 301, 302 расширяют при помощи специального кода расширения С1, С5, например при помощи кода Уолша, таким образом, чтобы каждый сигнал 401, 402 занимал одинаковую спектральную ширину диапазона. Этот код предназначен для однозначной идентификации канала передачи, связанного с частотным диапазоном L1 или L5. После этого расширенные сигналы 401, 402 передают на одинаковой центральной частоте в соответствии с методом доступа CDMA. В частности, используемые коды расширения является ортогональными между собой, обеспечивая одновременную передачу сигналов по восходящему каналу связи от нескольких станций NLES. К полученному таким образом навигационному сигналу 403 добавляют контрольный сигнал, смещенный по фазе на 90° и тоже расширенный при помощи специального кода расширения С0, предназначенный для идентификации передающей станции NLES и для аутентификации навигационного сигнала. Используемый метод аутентификации может быть любым известным методом, обеспечивающим идентификацию принятого сигнала. В частности, можно указать способы аутентификации, описанные в следующих патентных заявках: FR 2921528, раскрывающей способ, применяющий средства распознавания источника и/или содержимого радиочастотного сигнала, или US2009/0179743 под названием «Pseudo-random authentification code altering scheme for a transponder and a base station», или US 2005/0041955 под названием «Authentification of data in a digital transmission system». Можно также использовать так называемые технологии «watermarking», предназначенные для спутниковой связи.
Наконец, полученный сигнал транспонируют в диапазон С или Ku при помощи местного гетеродина IF для его передачи по восходящему каналу связи на спутник SAT дифференциальной коррекции.
Изменяя генерирование навигационного сигнала, как показано на фиг.4а, изобретение позволяет, в частности, исключить дифференциальные погрешности, индуцируемые каналами передачи, связанными с разными частотными диапазонами L1, L5 восходящей связи. Введение контрольного сигнала позволяет одновременно производить на борту спутника аутентификацию передаваемого сигнала и повысить эффективность оценки отношения сигнала к шуму. Кроме того, это позволяет также устранить проблемы синхронизации между двумя каналами, так как сигналы, ранее предназначавшиеся для передачи в диапазоне L1 или L5, теперь кодируются спектрально и передаются на одинаковой частоте. Наконец, использование кода расширения С0, специфического для каждой передающей станции NLES, позволяет применять резервирование горячего типа между станциями, что будет более подробно пояснено ниже.
В варианте выполнения изобретения, показанном на фиг.4b, предварительно к навигационным сигналам в диапазоне L1 и L5 применяют модуляцию типа CCSK (Cyclic Code Shift Keying), прежде чем приступить к этапу спектрального расширения при помощи кодов Уолша С1, С5.
Технология модуляции CCSK хорошо известна специалисту, например, из публикации «Cyclic Code Shift Keying: A Low Probability of Intercept Communication Technique, IEEE Transactions on Aerospace and Electronic Systems, Vol. 39, No 3, July 2003». Она состоит в использовании единого кода расширения Csk типа PN (Pseudo Noise) для модуляции каждого навигационного сигнала со смещением последовательности кода на заранее определенное число символов для осуществления модуляции каждого сигнала.
Этот вариант выполнения позволяет отказаться от контрольного сигнала и произвести аутентификацию станции NLES напрямую, идентифицируя коды CCSK, применяемые к навигационным сигналам. Используют всего один код CCSK для всех передающих станций NLES, смещая последовательность кода на заранее определенное число символов каждый раз перед осуществлением модуляции сигнала.
В другом (не представленном) варианте выполнения изобретения контрольный сигнал можно сохранить, но дополнительно модулировать при помощи кода CCSK, чтобы повысить эффективность обнаружения и, следовательно, аутентификации различных станций NLES, благодаря хорошим свойствам функции автокорреляции модуляции CCSK.
В другом варианте изобретения применяют разные поляризации для передачи сигналов в диапазоне L1 и L5. Например, для одного сигнала используют правую поляризацию, а для другого - левую поляризацию. Таким образом, ограничивают перекрестную корреляцию между двумя сигналами, что позволяет еще больше повысить эффективность при незначительной дифференциальной дисперсии между сигналами.
В еще одном варианте изобретения применяют одинаковую поляризацию для передачи сигналов в диапазоне L1 и L5 одной станции NLES, но разную поляризацию для двух разных резервных станций NLES. Этот сценарий включает в себя также случай, когда данная станция NLES передает сигналы только в диапазоне L5, а другая резервная станция NLES передает сигналы только в диапазоне L1 с поляризацией, отличной от поляризации сигналов в диапазоне L1, передаваемых первой станцией.
Схема на фиг.5 иллюстрирует основные функции полезной нагрузки спутника SBAS дифференциальной коррекции в соответствии с изобретением. Элементы, общие с известной полезной нагрузкой, описанной со ссылками на фиг.2, обозначены такими же позициями.
Устройства 204, 205, 214, 215 преобразования частоты для каждого канала исключены и заменены единственным навигационным процессором 501, который принимает навигационный сигнал, передаваемый одной или несколькими станциями NLES, и передает его на один из каналов усиления и фильтрации для трансляции пользователям в зависимости от частотного диапазона L1, L5, идентифицированного соответствующим кодом расширения С1, С5.
На фиг.5b схематично представлен вариант выполнения полезной нагрузки в соответствии с изобретением. В этом варианте, используя усилитель 502 и полосовой фильтр 504, применяют специальный обратный канал с наземной станцией или наземными станциями NLES. Этот обратный канал работает в диапазоне Ku или С, как и восходящий канал связи с спутником дифференциальной коррекции.
Как было указано выше, некоторые системы дифференциальной коррекции, такие как европейская система EGNOS, уже применяют специальный обратный канал для спутников дифференциальной коррекции, и этот канал служит только для автоматического согласования во времени спутника по базе времени, связанной с наземными станциями.
В описанном ранее варианте выполнения изобретения обратный канал спутника дифференциальной коррекции позволяет дополнительно передавать определенную информацию на наземные станции NLES, чтобы улучшить непрерывность обслуживания во время переключения между двумя передающими станциями. В частности, на борту спутника осуществляют измерение отношения сигнала к шуму и помехам SNIR восходящего канала связи, затем это измерение передают на станции NLES через этот обратный канал. При этом осуществляют относительную синхронизацию между номинальной станцией и резервной станцией.
Фиг.6 иллюстрирует общую работу системы SBAS согласно варианту выполнения изобретения, в котором между спутником 600 дифференциальной коррекции и наземными навигационными станциями 601, 602 применяют обратный канал 611. На основании переданных спутником данных наземные станции 601, 602 устанавливают между собой синхронизационную связь 612. Эта связь 612 позволяет, в частности, синхронизировать станции по времени.
На фиг.7 представлена функциональная схема навигационного процессора 501 в соответствии с изобретением.
Аналоговый сигнал, принимаемый на входе процессора 501, преобразуют в цифровой при помощи аналого-цифрового преобразователя 701. Полученный цифровой сигнал направляют на вход первого модуля 702 обработки контрольного сигнала. Этот модуль 702 осуществляет синхронизацию и демодуляцию контрольного сигнала при помощи кодов расширения, записанных в памяти 703 для каждой станции NLES. Демодулированный контрольный сигнал аутентифицируют при помощи выбранного известного метода демодуляции в модуле 706 аутентификации. При помощи измерительного модуля 707 измеряют соотношение между сигналом и комбинацией шума и помех, то есть отношение SNIR.
Параллельно квадратурный сигнал, соответствующий навигационному сигналу, передаваемому различными станциями NLES, передают на демультиплексор 704, который связывает принятый навигационный сигнал с идентификатором станции NLES в зависимости от контрольного кода расширения С0 упомянутой станции. После этого навигационный сигнал, связанный с идентификатором передающей станции NLES, передают в модуль 705, предназначенный, в частности, для авторизации ретрансляции сигнала в направлении пользователей. В зависимости от результата аутентификации, произведенной модулем 706 аутентификации, сигнал может быть заблокирован в случае, если этот результат оказывается отрицательным.
В случае когда контрольный сигнал не используют (на фиг.7 этот случай не представлен), аутентификацию передающей станции NLES производят непосредственно по кодам CCSK, применяемым к навигационным сигналам. Измерение отношения сигнала к шуму и помехам SNIR восходящей линии связи тоже осуществляют непосредственно на навигационных сигналах, а не на контрольном сигнале.
Если аутентификация является положительной, сравнивают измерения отношения сигнала к шуму и помехам SNIR, полученные на различных станциях NLES, и оставляют только сигнал, переданный станцией, имеющей наилучший баланс связи, для его ретрансляции на землю. Когда наилучшее отношение SNIR получают для сигнала, переданного резервной станцией, который, таким образом, не является ретранслируемым оптимальным сигналом, полезная нагрузка в соответствии с изобретением осуществляет переключение станций, выбирая в качестве нового оптимального сигнала сигнал, переданный резервной станцией и имеющий наибольшее отношение SNIR. Таким образом, на борту спутника переключение происходит прозрачно без прерывания обслуживания. Решение о переключении между двумя передающими станциями NLES принимает навигационный процессор 501, когда отношение SNIR, измеренное на номинальном сигнале, снижается ниже заранее определенного порога.
В случае доступности обратного канала (варианты выполнения изобретения описаны со ссылками на фиг.5b и 6) измерения отношения сигнала к шуму и помехам SNIR передают на наземные станции NLES по доступному обратному каналу. Для этого упомянутые измерения передают при помощи сигнала, например, модулированного при помощи модуляции BPSK, и на частоте, отличной от частоты, используемой для передачи навигационного сигнала. При этом используют частотный план типа FDM.
Таким образом, обратный канал в соответствии с изобретением обеспечивает, с одной стороны, передачу в первом частотном диапазоне одновременно номинального и резервного сигнала в целях автоматической синхронизации во времени сигнала, передаваемого спутником, и, с другой стороны, передачу во втором частотном диапазоне служебного сигнала, содержащего данные отношения SNIR для каждой идентифицированной передающей станции NLES. Для этого модуль 705 осуществляет генерирование служебного сигнала, содержащего данные об отношении SNIR, оценку которого произвел модуль 707. Обратный канал реализуют в виде модуля дополнительной дискретизации 708 и цифро-аналогового преобразователя 709.
Кроме того, если переключение осуществляют на борту спутника, выбор номинальной станции NLES тоже можно передать через этот служебный сигнал, чтобы информировать наземные станции о произведенном переключении.
Когда станции NLES 601, 602 принимают служебный сигнал, переданный спутником 600 дифференциальной коррекции, они корректируют мощность своей передачи, чтобы каждая станция передавала сигнал, согласованный по коэффициенту усиления или амплитуде с оптимальным сигналом, то есть с сигналом, передаваемым номинальной станцией NLES. Таким образом, все сигналы, передаваемые по восходящему каналу связи спутника дифференциальной коррекции, имеют эквивалентную мощность, что еще больше облегчает прозрачное переключение между станциями на борту спутника, когда номинальная станция оказывается неисправной.
Для реализации этого согласования по мощности необходимо только измерение отношения SNIR номинального сигнала. В версии выполнения изобретения спутник передает все измерения отношения SNIR, чтобы резервные станции NLES могли оценить качество своей связи.
В другой версии выполнения изобретения кроме измерения отношения SNIR полезная нагрузка спутника осуществляет измерение временной задержки между различными сигналами, принимаемыми по каналу восходящей связи, с одной стороны, от номинальной станции NLES и, с другой стороны, от резервных станций NLES. Сигнал номинальной станции идентифицируют при помощи кода расширения контрольного сигнала, как было указано выше, или напрямую на основании идентификации кодов CCSK самих навигационных сигналов, в зависимости от выбранной версии изобретения. При этом осуществляют измерение временной задержки между моментом приема номинального сигнала и моментом приема каждого из сигналов, передаваемых резервными станциями NLES. Это измерение временной задержки передают также со служебным сигналом через обратный канал. Эту информацию принимают наземные станции NLES, которые могут осуществлять синхронизацию по времени своих соответствующих передатчиков через наземную связь 612, чтобы синхронизировать свои передачи по каналу восходящей связи.
Эта синхронизация еще больше улучшает непрерывность обслуживания во время переключения станций, производимого полезной нагрузкой.
Задачей изобретения является синхронизация по времени и по мощности всех сигналов, передаваемых различными станциями NLES по каналу восходящей связи, с целью осуществления так называемого горячего резервирования.
Кроме того, при приеме навигационного сигнала, переданного по обратному каналу, каждая станция осуществляет контроль целостности, сравнивая принятое сообщение дифференциальной коррекции с ранее переданным сообщением. Если контроль оказывается отрицательным, станция прекращает передачу. Спутник больше не принимает навигационный сигнал, передаваемый этой станцией, и может осуществить переключение на резервную станцию, имеющую наилучший баланс связи.
После аутентификации оптимального навигационного сигнала, оставляемого среди сигналов, переданных станциями NLES, его передают на второй модуль 710 обработки сигнала, который производит демодуляцию навигационного сигнала в зависимости от его соответствующего кода расширения 711 и/или от его поляризационной составляющей. В частности, осуществляют операцию сужения сигнала на основании известного кода расширения. Каждый код расширения соответствует одной частотной полосе в диапазоне L, используемом для передачи навигационных сигналов пользователям. После идентификации частотного диапазона, например диапазона L1 или L5, навигационный сигнал ретранслируют пользователям системы через канал частотной конверсии, содержащий, по меньшей мере, один модуль 713 дополнительной дискретизации и цифро-аналоговый преобразователь 714. В случае если никакого контрольного сигнала не используют, аутентификацию передающей станции NLES производят вместе с демодуляцией CCSK.
Кроме того, модуль 710 обработки сигнала позволяет также применять к сигналам поправки по амплитуде, фазе и/или задержке при помощи одной или нескольких калибровочных таблиц 712. Эти калибровочные таблицы составлены на основании произведенных температурных измерений на полезной нагрузке и позволяют идентифицировать дифференциальные дисбалансы по амплитуде, задержке и фазе между каждым каналом передачи в диапазоне L. Эти таблицы составляют на основании измерений, произведенных перед вводом в эксплуатацию спутника. После этого поправки обновляют в зависимости от температуры находящихся в эксплуатации приборов, измеряемой устройством измерения температуры. Эти поправки обеспечивают точную балансировку дифференциальных путей передачи.
Альтернативный вариант осуществления дифференциальной коррекции различных каналов передачи в диапазоне L состоит в использовании одного или нескольких резервных каналов при передаче, которые позволяют косвенно сохранять передаваемый сигнал, затем измерять отклонения между сохраненным переданным сигналом и принятым сигналом.
В частном варианте применения изобретения используют номинальную станцию NLES для трансляции рабочих сигналов в диапазоне L1 и L5 и резервную станцию NLES для передачи тестовых сигналов подтверждения работоспособности системы с целью тестирования некоторых из ее функциональных компонентов или с целью качественной оценки системы.
В этом случае различные используемые коды расширения С1, С5, С0 являются специфическими для тестовых сигналов.
Используемые тестовые сигналы можно передавать при помощи той же станции NLES, которую используют для передачи номинальных навигационных сигналов, при той же поляризации антенны или с перекрестной поляризацией по отношению к навигационным сигналам. Тестовые сигналы можно также передавать при помощи станции NLES, специально выделенной для осуществления тестов.
Преимуществом изобретения является возможность сохранения первостепенной задачи спутника дифференциальной коррекции, то есть ретрансляции сообщений дифференциальной коррекции в направлении пользователей, при одновременном улучшении непрерывности обслуживания во время переключения между резервными станциями NLES. Оно позволяет также улучшить аутентификацию передаваемых сигналов и бороться против возможных искажений, а также повысить эффективность системы, когда для передачи навигационных сигналов используют разные частотные диапазоны L1, L5.
Изобретение относится к полезной нагрузке для спутника дифференциальной коррекции. Технический результат - предложение для спутника полезной или полупрозрачной полезной нагрузки, которая позволяет выполнять задачу спутника прозрачной ретрансляции навигационных сообщений и сообщений дифференциальной коррекции и одновременно вводить некоторые специфические виды обработки на уровне спутника, позволяющие повысить безопасность, обеспечить непрерывность обслуживания, контроль за целостностью, а также эффективность радиообмена. Для этого нагрузка содержит входной канал (201, 202, 503), предназначенный для приема навигационных сигналов, передаваемых, по меньшей мере, одной наземной навигационной станцией (NLES) в первом частотном диапазоне, и множество выходных каналов (206, 207, 208, 216, 217, 218), каждый из которых предназначен для трансляции навигационных сигналов в частотном диапазоне, отличном от упомянутого первого диапазона и от других диапазонов трансляции, отличающаяся тем, что дополнительно содержит навигационный процессор (501). 5 н. и 15 з.п. ф-лы, 7 ил.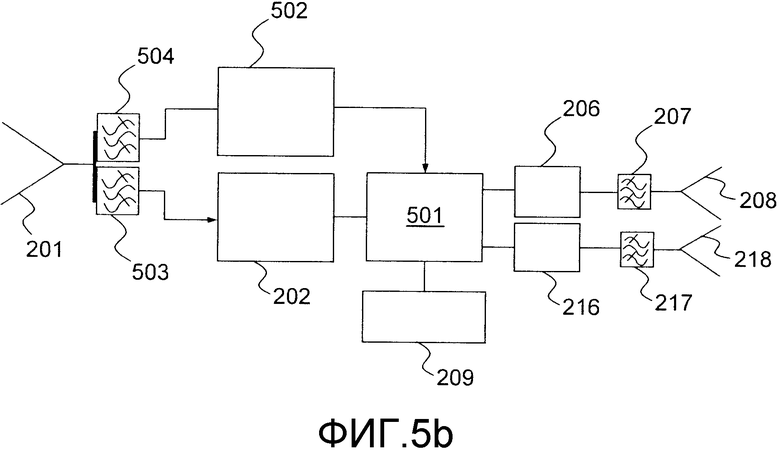
1. Полезная нагрузка для спутника (600) дифференциальной коррекции, содержащая входной канал (201, 202, 503), предназначенный для приема навигационных сигналов, передаваемых, по меньшей мере, одной наземной навигационной станцией (NLES) в первом частотном диапазоне, и множество выходных каналов (206, 207, 208, 216, 217, 218), каждый из которых предназначен для трансляции навигационных сигналов в частотном диапазоне, отличном от упомянутого первого диапазона и от других диапазонов трансляции, отличающаяся тем, что дополнительно содержит навигационный процессор (501), выполненный с возможностью исполнения следующих операций для каждого из принятых сигналов:
- на основании первого набора (703) кодов расширений, каждый из которых связан с одной наземной навигационной станцией (NLES), и для каждого из упомянутых кодов сигнал сужают (702) по фазе, чтобы выделить контрольный сигнал,
- производят аутентификацию (706) упомянутого контрольного сигнала и на ее основании определяют станцию (NLES), передающую упомянутый сигнал,
- если аутентификация (706) оказалась отрицательной, блокируют упомянутый навигационный сигнал,
- измеряют (707) отношение (SNIR) сигнала к шуму и помехам, влияющее на упомянутый контрольный сигнал,
- среди принятых навигационных сигналов оставляют сигнал, который имеет наибольшее отношение сигнала к шуму и помехам и для которого аутентификация является положительной, при этом упомянутый оставляемый сигнал называют номинальным сигналом, при этом станцию (NLES), передающую номинальный сигнал, называют номинальной станцией, при этом другие передающие станции (NLES) называют резервными станциями,
- на основании второго набора (711) кодов расширения, каждый из которых связан с одним типом навигационного сигнала, предназначенного для передачи в одном из частотных диапазонов трансляции, и для каждого из упомянутых кодов номинальный навигационный сигнал сужают (710) по квадратуре,
- упомянутый номинальный навигационный сигнал передают (713, 714) в частотном диапазоне трансляции, связанном с используемым кодом расширения.
2. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.1, в которой упомянутый контрольный сигнал является предварительно демодулируемым в соответствии с модуляцией типа «Cyclic Code Shift Keying», при этом аутентификацию контрольного сигнала производят, идентифицируя код, связанный с упомянутой модуляцией.
3. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.1, отличающаяся тем, что, если отношение (SNIR) сигнала к шуму и помехам, измеренное на упомянутом номинальном сигнале, уменьшается ниже заранее определенного порога, новым оставляемым номинальным сигналом является сигнал, имеющий наибольшее отношение сигнала к шуму и помехам.
4. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.1, отличающаяся тем, что дополнительно содержит обратный канал (502, 504), предназначенный для трансляции в упомянутом первом частотном диапазоне, по меньшей мере, одного служебного сигнала, по меньшей мере, на одну наземную навигационную станцию (NLES), при этом упомянутый служебный сигнал содержит, по меньшей мере, измерение отношения (SNIR) сигнала к шуму и помехам, по меньшей мере, номинального сигнала, при этом упомянутый служебный сигнал предназначен для реализации автоматического регулирования мощности передачи упомянутых резервных станций (NLES) по мощности передачи номинальной станции (NLES).
5. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.4, отличающаяся тем, что упомянутый служебный сигнал дополнительно содержит измерения отношения (SNIR) сигнала к шуму и помехам навигационных сигналов, принятых спутником (600) и переданных всеми передающими станциями (NLES).
6. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.4, отличающаяся тем, что упомянутый служебный сигнал дополнительно содержит измерения временных задержек между приемом спутником (600) номинального сигнала, с одной стороны, и сигналов, переданных резервными наземными навигационными станциями (NLES), при этом упомянутый служебный сигнал предназначен для синхронизации по времени упомянутых станций (NLES) между собой.
7. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.4, отличающаяся тем, что упомянутый обратный канал (502, 504) дополнительно предназначен для трансляции номинального навигационного сигнала в упомянутом первом частотном диапазоне.
8. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.1, отличающаяся тем, что упомянутый первый частотный диапазон является диапазоном С или Ku и упомянутые частотные диапазоны трансляции являются, по меньшей мере, диапазонами L1 и L5.
9. Полезная нагрузка для спутника (600) дифференциальной коррекции по п.1, отличающаяся тем, что упомянутые коды расширения являются кодами Уолша.
10. Полезная нагрузка для спутника (600) дифференциальной коррекции, содержащая входной канал (201, 202, 503), предназначенный для приема навигационных сигналов, передаваемых, по меньшей мере, одной наземной навигационной станцией (NLES) в первом частотном диапазоне, и множество выходных каналов (206, 207, 208, 216, 217, 218), каждый из которых предназначен для трансляции навигационных сигналов в частотном диапазоне, отличном от упомянутого первого диапазона и от других диапазонов трансляции, отличающаяся тем, что дополнительно содержит навигационный процессор (501), выполненный с возможностью исполнения следующих операций для каждого из принятых сигналов:
- упомянутый принятый сигнал демодулируют в соответствии с модуляцией типа «Cyclic Code Shift Keying»,
- производят аутентификацию (706) упомянутого принятого сигнала, идентифицируя код, связанный с упомянутой модуляцией, и на ее основании определяют станцию (NLES), передающую упомянутый сигнал,
- если аутентификация (706) оказалась отрицательной, блокируют упомянутый навигационный сигнал,
- измеряют (707) отношение (SNIR) сигнала к шуму и помехам, влияющее на упомянутый принятый сигнал,
- среди принятых навигационных сигналов оставляют сигнал, который имеет наибольшее отношение сигнала к шуму и помехам и для которого аутентификация является положительной, при этом упомянутый оставляемый сигнал называют номинальным сигналом, при этом станцию (NLES), передающую номинальный сигнал, называют номинальной станцией, при этом другие передающие станции (NLES) называют резервными станциями,
- на основании набора (711) кодов расширения, каждый из которых связан с одним типом навигационного сигнала, предназначенного для передачи в одном из частотных диапазонов трансляции, и для каждого из упомянутых кодов номинальный навигационный сигнал сужают (710) по квадратуре,
- упомянутый номинальный навигационный сигнал передают (713, 714) в частотном диапазоне трансляции, связанном с используемым кодом расширения.
11. Спутник (600) дифференциальной коррекции, содержащий полезную нагрузку по одному из предыдущих пунктов, предназначенную для приема навигационного сигнала по восходящей линии связи в первом частотном диапазоне и для ретрансляции упомянутого сигнала по нисходящей линии связи в множестве частотных диапазонов трансляции.
12. Наземная навигационная станция (NLES), выполненная с возможностью приема сообщения дифференциальной коррекции и для генерирования навигационного сигнала, содержащего упомянутое сообщение, при этом упомянутый навигационный сигнал спектрально расширяют при помощи первого кода расширения (C1, C5), связанного с его частотным диапазоном (L1, L5) трансляции, при этом упомянутый навигационный сигнал передают по восходящей линии связи в первом частотном диапазоне, отличном от частотного диапазона (L1, L5) трансляции.
13. Наземная навигационная станция (NLES) по п.12, в которой к упомянутому навигационному сигналу добавляют по квадратуре контрольный сигнал, спектрально расширенный при помощи второго кода расширения (С0), связанного с упомянутой наземной навигационной станцией (NLES).
14. Наземная навигационная станция (NLES) по п.12, в которой к упомянутому навигационному сигналу или к упомянутому контрольному сигналу предварительно применяют модуляцию типа «Cyclic Code Shift Keying».
15. Наземная навигационная станция (NLES) по п.12, в которой поляризация передаваемого навигационного сигнала отличается в зависимости от частотного диапазона трансляции.
16. Система дифференциальной коррекции, содержащая:
- по меньшей мере, одну станцию (RIMS) наблюдения, выполненную с возможностью приема радионавигационного сигнала, переданного, по меньшей мере, одним радионавигационным спутником (NAV), и для осуществления измерений на упомянутом сигнале,
- по меньшей мере, один центр (CPF) обработки, выполненный с возможностью приема упомянутых измерений, переданных, по меньшей мере, одной станцией (RIMS) измерения, и для формирования, по меньшей мере, одного сообщения дифференциальной коррекции на основании упомянутых измерений,
- множество наземных навигационных станций (NLES) по одному из пп.12-15,
- по меньшей мере, один спутник (600) дифференциальной коррекции по п.11.
17. Система дифференциальной коррекции по п.16, отличающаяся тем, что выполнена с возможностью применения переключения наземных навигационных станций (NLES) типа горячего резервирования.
18. Система дифференциальной коррекции по п.16, в которой поляризация передаваемого навигационного сигнала отличается между двумя резервными наземными навигационными станциями (NLES).
19. Система дифференциальной коррекции по п.16, отличающаяся тем, что при приеме служебного сигнала, переданного упомянутым спутником (600) дифференциальной коррекции и содержащего, по меньшей мере, измерение отношения (SNIR) сигнала к шуму и помехам, по меньшей мере, упомянутого номинального сигнала, упомянутые наземные навигационные станции (NLES) осуществляют автоматическое регулирование своей мощности передачи по мощности передачи номинальной станции.
20. Система дифференциальной коррекции по п.16, отличающаяся тем, что при приеме упомянутого служебного сигнала упомянутые наземные навигационные станции (NLES) осуществляют синхронизацию по времени своих соответствующих передач.
| МНОГОПЕРЕХОДНЫЕ ПАКЕТНЫЕ СЕТИ РАДИОСВЯЗИ | 1995 |
|
RU2249916C2 |
| СПОСОБ УПРАВЛЕНИЯ ОРИЕНТАЦИЕЙ ГЕОСТАЦИОНАРНОГО КОСМИЧЕСКОГО АППАРАТА, ОСНАЩЕННОГО РАДИОМАЯКОМ | 2006 |
|
RU2354590C2 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 7293743 B2, 13.11.2007. | |||

