Изобретение относится к способам и устройству для радиоопределения. Радиоопределение включает определение местоположения и/или времени на основе использования сигналов определения расстояния между оконечным устройством и несколькими радиомаяками. В случае спутникового радиоопределения радиомаяками являются спутники, выведенные на орбиту.
В настоящее время существуют две глобальные системы радиоопределения. Система GPS/Navstar состоит из созвездия спутников на двенадцатичасовых (полусинхронных) орбитах, функционирующих под управлением и в интересах Министерства обороны США. Система местоопределения "ГЛОНАСС" оснащена подобными средствами, управление которыми осуществляется правительством РФ (в дальнейшем эта система рассматриваться не будет).
В системе GPS/NAVSTAR на борту каждого спутника установлены высокоточные атомные часы, причем на всех спутниках часы синхронизированы. Параметры орбит всех спутников хорошо известны, благодаря чему каждый спутник может устанавливать свое текущее положение. Периодически с земной станции на спутники закладывается информация об изменениях параметров орбит.
Спутники передают регулярные сообщения, которые содержат
1) время бортовых атомных часов;
2) координаты спутника;
3) информацию о состоянии ИСЗ.
Подробно формат сигналов системы GPS описан в документе "Global Positioning Service Signal Specification", 2ng edition, 2 June 1995.
Наземный приемник системы GPS обеспечивает получение сигналов с нескольких ИСЗ. Созвездие спутников организовано таким образом, что почти в каждой точке на поверхности Земли и почти постоянно на протяжении суток одновременно в зоне радиовидимости находится не менее четырех ИСЗ. Фиксируя разности времен прихода сигналов от различных ИСЗ, для чего используется принятое бортовое время, и с учетом координат спутников (передаваемых с борта ИСЗ), приемник системы GPS вычисляет относительные дальности до каждого ИСЗ, а затем на основе полученных четырех относительных дальностей вычисляет свое местоположение по трем координатам и калибрует местные часы.
Колебания в запаздывании сигналов, обусловленные изменением состояния ионосферы, могут снизить точность радиоопределения, и, соответственно, для компенсации этого нежелательного эффекта с каждого спутника сигналы передаются на двух частотах (обозначенных L1 и L2). Так как колебания ионосферных задержек зависят от частоты, то приемник военного назначения системы СРS за счет приема сигналов на двух частотах обеспечивает оценивание и коррекцию ионосферных задержек.
Несмотря на то что система GPS/Navstar преимущественно рассчитана на использование в военных целях, приемники этой системы широко распространены и среди гражданских потребителей. Однако гражданские потребители не могут декодировать так называемый "Р-код", при помощи которого кодируются информационные сигналы на первой и второй частотах, а поэтому не могут осуществлять и двухчастотную ионосферную коррекцию. Кроме того, ограничение точности обслуживания гражданских потребителей обеспечивается за счет реализации так называемого "выборочного доступа", при котором в показания бортовых часов и/или в координаты спутника, содержащиеся в информационных сигналах, кодируемых "С/А-кодом" и передаваемых с различных ИСЗ только на частоте L1, преднамеренно вносятся небольшие ошибки. Приемники военного назначения обеспечивают декодирование сигналов, в которых отсутствуют эти преднамеренные ошибки.
Если координаты некоторой наземной станции известны с высокой точностью, то может быть определено, какие спутники передают искаженную информацию и какова величина этих искажений, а затем могут передаваться сигналы, в которых указываются номера ИСЗ с искаженной информацией, а также величина корректировки, которую необходимо выполнить при приеме сигналов приемниками системы GPS для компенсации ошибок, возникающих при одночастотных измерениях, и получения, таким образом, достоверного сигнала местоопределенния. Передача таких сигналов через геостационарный ИСЗ предлагается, например, в патенте США US 4445110.
Однако хотя корректирующая информация может быть точно получена для земной станции с известными координатами, такая корректировка становится все менее точной при удалении от данной земной станции, что объясняется неоднородностью ионосферы (а также неоднородностью других атмосферных слоев, тропосферы, например). Соответственно, ограничивается и применимость такого способа "дифференциальной GPS".
Вместо применения приемника системы GPS, который обеспечивает прием сигналов на двух частотах для выполнения ионосферной коррекции, или приемника, обеспечивающего коррекцию в соответствии со способом дифференциальной GРS, могут передаваться сигналы с информацией о состоянии ионосферы. В последние годы обсуждается возможность создания широкозональной дифференциальной системы. Одним из примеров является Система широкой зоны обслуживания (WAAS), предложенная Федеральным Авиационным Управлением США для обеспечения информации для выполнения дифференциальной коррекции в пределах территории (континентальной части) США. В такой широкозональной системе информация для выполнения ионосферной коррекции в узловых точках сети, разнесенных в пределах обслуживаемой зоны (например, Европы или США), передается через обслуживающий эту зону геостационарный ИСЗ, а в приемнике осуществляется интерполяция между узловыми точками сети для уточнения величины коррекции ионосферной задержки, которую необходимо выполнить при приеме одночастотного сигнала с каждого ИСЗ системы GPS, находящегося в зоне радиовидимости. Кроме того, радиопередача содержит корректирующую информацию для компенсации ошибок "выборочного доступа". Патент США US-A-5323322 раскрывает спутниковую систему радиоопределения, в которой передается информация о состоянии ионосферы.
В статьях J.R.Nagle, G.V.Kinal и A.J.Van Dierendonck "Развитие гражданской глобальной спутниковой навигационной службы с использованием геостационарных ИСЗ", ION 49th Annual Meeteng, June 1993, "Реализация канала целостности глобальной навигационной спутниковой службы (ГНСС) и рост ГНСС в будущем", INA 18th Annual Meeting, October 1993, а также "Варианты Глобальной навигационной спутниковой службы (ГНСС) с учетом перспективных требований гражданских потребителей", PLANS'94 Technical Program., April 1994 предлагается дополнить систему GPS/Navstar гражданскими спутниками на низких околоземных, средневысотных или геостационарных орбитах.
В соответствии с одним аспектом настоящего изобретения предлагается приемник для спутникового радиоопределения, обеспечивающий прием многочастотного дальномерного сигнала и одночастотного дальномерного сигнала, уточнение величины ионосферной задержки из многочастотного дальномерного сигнала путем измерения относительного запаздывания сигналов на разных частотах, на которых передается многочастотный сигнал, а затем оценивание величины задержки для последующих дальномерных сигналов с учетом измеренной величины ионосферной задержки для многочастотного дальномерного сигнала.
В соответствии с другим аспектом настоящего изобретения предлагается спутниковое бортовое оборудование (полезная нагрузка), которое может работать в одном из двух режимов. В первом режиме спутниковое бортовое оборудование формирует автономные дальномерные сигналы, которые не содержат вспомогательной информации, принимаемой с наземной станции. Во втором режиме ИСЗ добавляет вспомогательную информацию, поступающую с наземной станции.
В соответствии с еще одним аспектом настоящего изобретения предлагается спутниковое бортовое оборудование, которое обеспечивает формирование автономных дальномерных сигналов и передачу информации, принятой с наземной станции. Если информации с наземной станции не поступает, то спутниковое бортовое оборудование передает холостую информацию с тем, чтобы держать открытым канал передачи.
В соответствии с еще одним аспектом настоящего изобретения предлагается устройство для подключения к узлу доступа к спутнику, которое приспособлено для приема вспомогательной информации, определения координат спутника, достижимого из узла доступа к спутнику, проверки попадания координат спутника в пределы заданного диапазона значений, зависящего от источника вспомогательной информации, а также для выдачи вспомогательной информации на узел доступа к спутнику при попадании координат спутника в заданный интервал значений.
В соответствии с еще одним аспектом настоящего изобретения предлагается спутниковый навигационный приемник, обеспечивающий прием информации об ионосферных задержках, который, однако, при выполнении радиоопределения может использовать информацию об ионосферных задержках только при наличии доступа к информации об ионосферных задержках, например, если известен код для декодирования информации об ионосферных задержках.
В соответствии с еще одним аспектом настоящего изобретения предлагается устройство формирования вспомогательной информации для узла доступа к спутнику, которое приспособлено для кодирования информации об ионосферных задержках без кодирования информации для дифференциальной коррекции, не связанной с ионосферными задержками, а также для выдачи кодированной информации об ионосферных задержках и некодированной информации для дифференциальной коррекции в узел доступа к ИСЗ.
В соответствии с еще одним аспектом настоящего изобретения предлагается спутниковый навигационный приемник, обеспечивающий прием информации об ионосферных задержках и информации об остаточных ошибках, а также коррекцию информации об ионосферных задержках с использованием информации об остаточных ошибках.
В соответствии с еще одним аспектом настоящего изобретения предлагается сеть дифференциальной коррекции, которая принимает информацию об ионосферных задержках из другой сети дифференциальной коррекции, принимает дальномерные сигналы навигационных спутников и на основе этого получает информацию об ионосферных задержках.
Варианты реализации изобретения будут описаны на примере со ссылками на чертежи, на которых представлено следующее:
фиг.1 - схематическое изображение спутниковой системы радиоопределения;
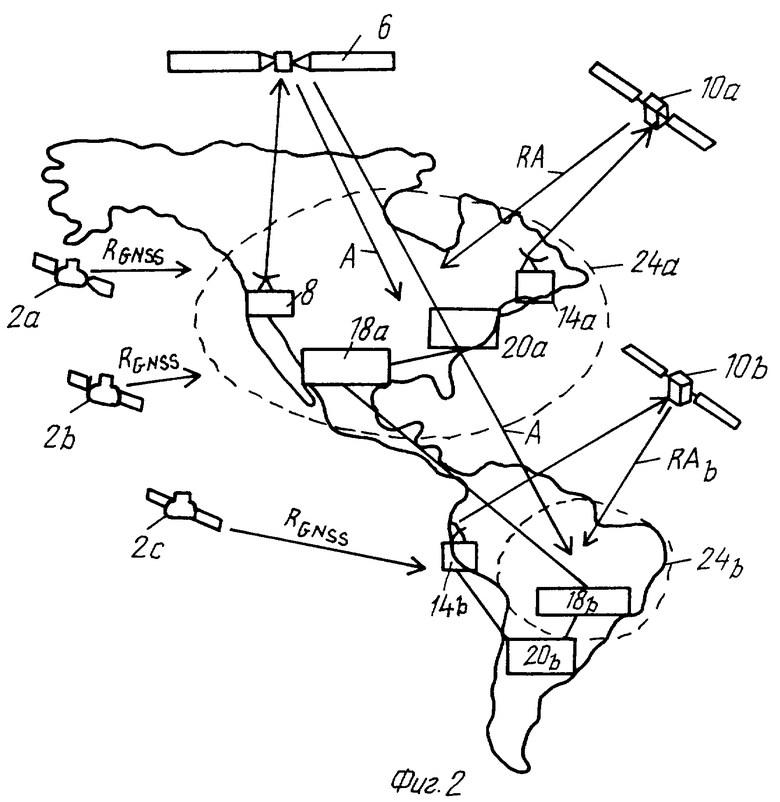
фиг. 2 - схематическое изображение части спутниковой системы радиоопределения, обслуживающей Североамериканскую и Южноамериканскую зоны;
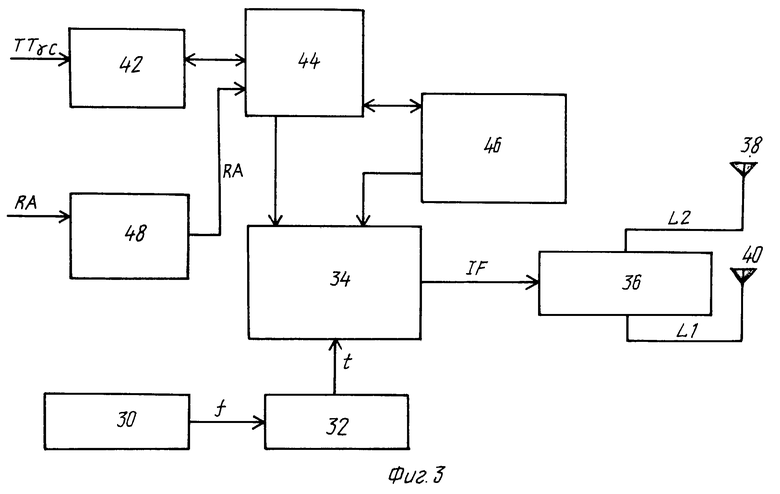
фиг. 3 - структурная схема навигационного бортового оборудования ИСЗ на средневысотной орбите;
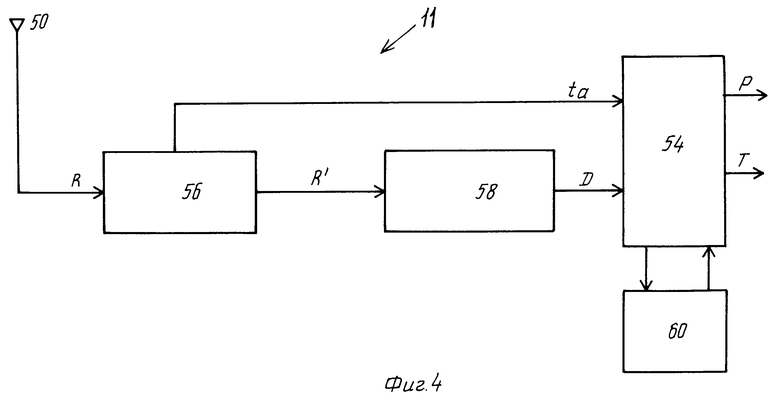
фиг.4 - структурная схема навигационного приемника;
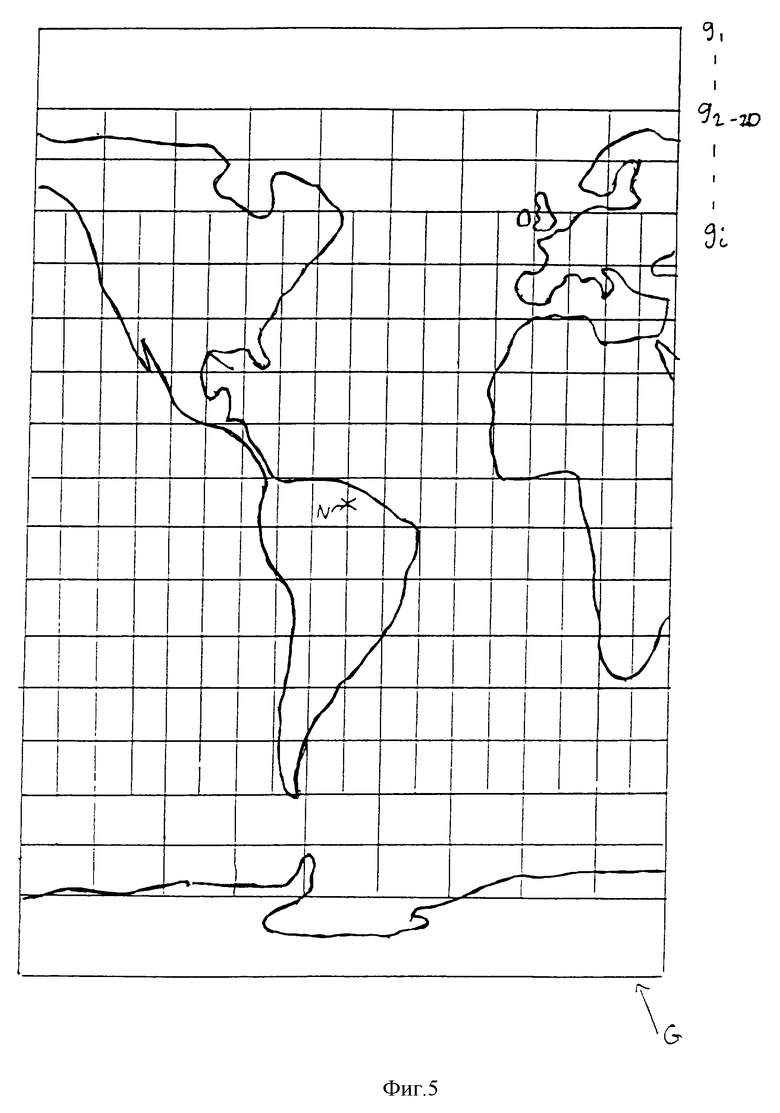
фиг. 5 - изображение сети, используемой для представления информации о состоянии ионосферы;
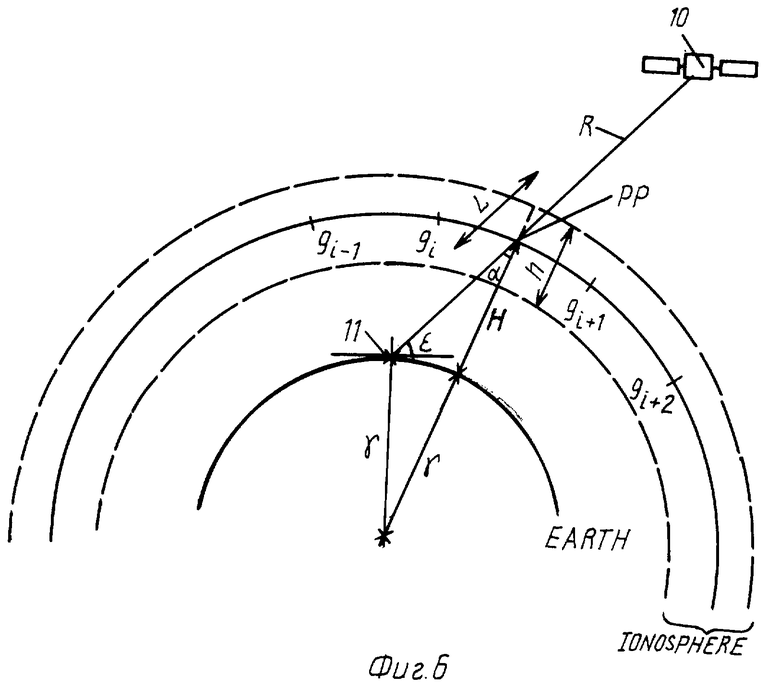
фиг.6 - иллюстрация вычисления точек прохождения ионосферного слоя.
Навигационная система
На фиг.1 показано схематическое изображение элементов спутниковой системы радиоопределения, а также связи между ними. Автономные дальномерные сигналы Rn формируются одним или несколькими спутниками Глобальной навигационной спутниковой службы (ГНСС) 2, такими, как спутники систем GPS/Navstar или "ГЛОНАСС". Несколько геостационарных спутников 6, таких как спутники связи Inmarsat-3 или специальные навигационные геостационарные спутники, каждый из которых имеет на борту навигационный ответчик для передачи информации дифференциальной коррекции и другой вспомогательной информации А из навигационной земной станции (НЗС) 8 навигационным приемникам 11, причем вспомогательная информация содержит информацию о целостности, ошибках и состоянии ионосферы, относящуюся к спутникам ГНСС 2 и их дальномерным сигналам Rn.
Один или несколько ИСЗ, находящихся на средних орбитах (средневысотных ИСЗ) 10, таких как ИСЗ для глобальной спутниковой системы связи IСО (ТМ), обеспечивают ретрансляцию региональной вспомогательной информации RA, передаваемой наземным узлом доступа к спутнику (УДС) 14, на навигационные приемники 11 совместно с автономными дальномерными сигналами Rm, синхронизированными с дальномерными сигналами Rn спутников ГНСС 2. Спутники системы ICO образуют созвездие из десяти ИСЗ на 6-часовых орбитах в двух орбитальных плоскостях, причем каждый спутник содержит навигационное и связное бортовое оборудование.
Сеть контрольных станций 16а, 16b и 16с, местоположение которых точно известно, принимает дальномерные сигналы Rn спутников ГНСС 2, а также дальномерные сигналы Rm ИСЗ на средних орбитах 10 и вычисляет ошибки в координатной и временной информации, содержащейся в этих дальномерных сигналах, путем определения разности между координатами, найденными на основе дальномерных сигналов R, и действительными координатами контрольных станций 16. Информация для дифференциальной коррекции передается с контрольных станций 16а, 16b и 16с в региональную станцию управления 18, которая формирует вспомогательную информацию А, содержащую значение ошибок в переменных координатах и показаниях бортовых часов спутников на средних орбитах 10, а также спутников ГНСС 2. В альтернативном варианте контрольные станции 16 могут являться простыми приемниками с вычислением дифференциальной коррекции, передаваемой на региональную станцию управления 18.
Ошибки координат и показаний бортовых часов в дальномерных сигналах R одинаковы для всех контрольных станций 16а, 16b и 16с. В то же время информация для дифференциальной коррекции, полученная с контрольных станций 16а, 16b и 16с, будет различаться по причине разности ионосферных задержек сигналов, принимаемых каждой из контрольных станций 16, зависящих от концентрации свободных электронов на ионосферном участке трассы распространения радиоволн, а также от других задержек, таких как тропосферная задержка, возникающая вследствие тропосферной рефракции.
В этой связи региональная станция управления 18 может отдельно получить информацию об ошибках в дальномерных сигналах Rm, Rn и о величине ионосферных задержек в областях ионосферы, через которые проходят дальномерные сигналы, принимаемые каждой из контрольных станций 16а, 16b и 16с. Эта информация передается в НЗС 8 для передачи в качестве вспомогательной информации А через геостационарные спутники 6 навигационным приемникам 11.
Кроме того, вспомогательная информация передается в служебную сеть 20, доступную региональным системам расширения зоны обслуживания 21а, 21b. Такие региональные системы расширения зоны обслуживания 21а, 21b могут включать местные контрольные станции для получения информации для дифференциальной коррекции в отдельных районах. Региональная вспомогательная информация RА, которая может содержать, например, более точную информацию о состоянии ионосферы и поправки к вспомогательной информации А применительно к некоторому отдельному району, подается поставщиками услуг (сервисными терминалами) в служебную сеть 20. Региональная вспомогательная информация RA может включать часть или всю вспомогательную информацию А. Региональная вспомогательная информация RА передается в УДС 14 для ретрансляции через спутники на средних орбитах 10 и выборочного приема навигационными спутниками 11.
Описанная выше система радиоопределения обеспечивает, в дополнение к существующим системам радиоопределения, таким как GРS и "ГЛОНАСС", дополнительные дальномерные сигналы Rm со спутников на средних орбитах 10. В данной реализации дальномерные сигналы Rm являются двухчастотными дальномерными сигналами, аналогичными сигналам, доступным военным пользователям системы GPS, но без шифрования и доступными благодаря этому всем пользователям. Приведенная выше система радиоопределения также передает вспомогательную информацию А в пределах широкой зоны обслуживания через геостационарные спутники 6, которая дополняется региональной вспомогательной информацией RA, передаваемой средневысотными ИСЗ 10.
Вспомогательная информация А закодирована в дальномерных сигналах Rg, генерируемых НЗС 8 и передаваемых через геостационарный спутник 6 навигационным приемникам 11. Положение геостационарного спутника 6 определяется в НЗС 8, которая также имеет точный эталон времени, такой как атомные часы или устройство двухчастотного спутникового радиоопределения, синхронизированный с эталонами на борту ИСЗ на средних орбитах 10 и спутников ГНСС 2. Определяется задержка, вносимая в дальномерный сигнал Rg, передаваемый из НЗС 8 на геостационарный спутник 6, и в дальномерный сигнал Rg включают координаты и время, рассчитанные так, что после ретрансляции через геостационарный спутник 6 они точно характеризуют время ретрансляции и координаты геостационарного ИСЗ 6.
Сигнал, ретранслированный в НЗС 8 через геостационарный спутник 6, образует временной контур, который позволяет определить задержку сигнала от НЗС 8 до геостационарного ИСЗ 6, а также измерить ионосферные эффекты. В этом случае дальномерный сигнал Rg имеет достаточную точность для того, чтобы обрабатываться так же, как в случае автономного формирования на борту геостационарного ИСЗ 6.
Описанная выше спутниковая система радиоопределения может быть выполнена поэтапно для обеспечения постепенно улучшающегося обслуживания по сравнению с обслуживанием, предоставляемым описанными выше спутниками ГНСС 2, следующим образом.
1 этап - существующие или предварительно запланированные геостационарные спутники связи, такие как ИСЗ Inmarsat-3, используются в качестве геостационарных спутников 6 для передачи дальномерных сигналов и вспомогательной информации Rg, А.
2 этап - специализированные навигационные спутники выводятся на геостационарную орбиту в качестве дополнительных геостационарных спутников 6. На этих специализированных навигационных спутниках предусмотрено формирование автономных дальномерных сигналов Rg.
3 этап - на средневысотную орбиту 10 запускаются спутники, обеспечивающие формирование дополнительных дальномерных сигналов Rm и передачу региональной вспомогательной информации RA.
На этапе 1 обеспечивается охват широкой зоны обслуживания, например, в соответствии с описанием системы WAAS. На этапах с 1 по 3 увеличивается число дальномерных сигналов, благодаря чему система в меньшей степени использует спутники ГНСС 2, которые имеют выборочную доступность.
Пример функционирования системы
На фиг.2 показан пример спутниковой системы радиоопределения, приведенной на фиг.1, обеспечивающей навигационное обслуживание в пределах Североамериканского и Южноамериканского континентов. Один из геостационарных спутников 6 передает вспомогательную информацию А, подготовленную первой региональной станцией управления 18а, на Североамериканский и Южноамериканский континенты. В первом районе обслуживания 24а, покрывающем США, первая служебная часть 20а обеспечивает региональную вспомогательную информацию RAa, которая может использоваться только в пределах первого района обслуживания 24а, поскольку содержит уточненные данные о состоянии ионосферы над территорией США. Региональная вспомогательная информация RАа передается в первый узел доступа к спутнику 14а и транслируется через первый ИСЗ на средней орбите 10а в пределах первого района обслуживания 24а. Дальномерные сигналы Rg в первом районе обслуживания 24а могут приниматься со спутников ГНСС 2а и 2b. Число и экземпляры спутников ГНСС 2, видимых из первого района обслуживания 24а под углом места, превышающим заданное минимальное значение, будет меняться со временем по мере движения спутников 2 по орбитам.
Первый спутник на средней орбите 10а будет также перемещаться относительно первого района обслуживания 24а, пока его угол места будет превышать пороговое значение, при котором еще возможен прием сигналов. Затем первый УДС 14а выберет другой ИСЗ на средней орбите 10, угол места которого превышает заданное пороговое значение уверенного приема, предпочтительно это будет один из спутников, приближающихся к первому району обслуживания 24а. УДС 14а прекращает передачу информации на первый ИСЗ на средней орбите 10а и вместо этого начинает передачу на выбранный средневысотный ИСЗ 10. Во избежание разрывов в передаче региональной вспомогательной информации RA, при переходе с одного спутника на другой УДС 14а может передавать информацию как на первый спутник на средней орбите 10а, так и на выбранный средневысотный спутник 10.
Второй район обслуживания 24b в Южной Америке включает вторую региональную станцию управления 18b, которая принимает информацию с контрольной сети, обеспечивающей контроль дальномерных сигналов, принимаемых в пределах второго района обслуживания 24b. Информация со второй региональной станции управления 18b посылается в первую региональную станцию управления 18а так, что информация для дифференциальной корректировке в пределах широкой зоны обслуживания собирается с контрольной сети, охватывающей Североамериканский и Южноамериканский континенты. В этом случае ошибка показания бортовых часов и ошибка координат могут быть определены с большей точностью. Вторая служебная сеть 20b принимает информацию со второй региональной станции управления 18b и дополнительно формирует более точную информацию о состоянии ионосферы в пределах района 24b. Эта информация передается на второй УДС 14b, который транслирует информацию через второй ИСЗ на средней орбите 10b на второй район обслуживания 24b.
В то же время вспомогательная информация, которая может использоваться в пределах широкой зоны обслуживания, передается при помощи геостационарного ИСЗ 6, находящегося в пределах прямой видимости для всей широкой зоны обслуживания. Более детальная информация, действительная в более узком географическом регионе, передается через спутник на средней орбите 10, который может обслуживать меньший участок земной поверхности. В этом случае информация, передаваемая геостационарным ИСЗ и спутником, находящимся на средней орбите, согласована с районами обслуживания этих спутников.
Навигационный спутник
На фиг.3 показано навигационное бортовое оборудование одного из ИСЗ 10, находящихся на средней орбите.
Бортовое оборудование включает стандарт частоты 30, такой как атомные часы. Сигнал с высокой частотной стабильностью f поступает из стандарта частоты 30 в генераторы 32, формирующие сигналы времени t в стандартном формате времени, таком как UTC (универсальный временной код).
Сигналы времени t поступают в устройство формирования навигационных сигналов 34. Бортовое оборудование включает также интерфейс телеметрии, траекторных измерений и управления (ТТИУ) 42, который принимает закодированную информацию ТТИУ с наземной станции ТТИУ (не показана). Интерфейс ТТИУ 42 подает данные траекторных измерений в процессор 44, формирующий информацию, содержащую эфемериды ИСЗ на средней орбите 10. Эфемериды записываются в запоминающее устройство 46, обеспечивающее исправление ошибок во избежание искажения информации при воздействии внешних излучений и оснащенное двойным буфером, благодаря которому новые эфемериды не записываются поверх старых до тех пор, пока новые эфемериды не будут проверены. Эфемериды считываются из запоминающего устройства 46 устройством формирования навигационных сигналов 34, которое кодирует сигналы времени t и эфемериды с применением кода Голда того же семейства, что и используемые на спутниках GPS/ Navstar, как это описано в документации системы GPS. Код Голда представляет собой код на основе псевдослучайного шума (ПСШ), имеющий низкую автокорреляцию и низкую взаимную корреляцию с другими кодами Голда.
Сигналы промежуточной частоты IF, содержащие закодированные эфемериды и временную информацию, поступают на преобразователь частоты 36, который преобразует сигнал промежуточной частоты IF в сигналы двух различных частот F1 и F2, которые передаются соответственно через передающие антенны 40 и 38.
Частоты Р1 и F2 реально могут совпадать с частотами L1 и L2 системы СРS для обеспечения совместимости с существующими приемниками системы GPS, или они могут быть смещены относительно частот L1 и L2 так, чтобы сигналы со спутников на средних орбитах 10 могли приниматься только с применением модернизированных навигационных приемников 11. В данной реализации частота F1 составляет 1576 МГц, а частота F2 - 1228 МГц.
Управление устройством формирования навигационных сигналов 34 осуществляется процессором 44, причем в процессор 44 из устройства формирования навигационного сигнала 34 поступает информация о состоянии.
Бортовое оборудование также включает канальный интерфейс фидерной линии 48, принимающий региональную вспомогательную информацию RА из УДС 14. Процессор 44 выборочно подает региональную вспомогательную информацию RА в запоминающее устройство 46 для объединения с выходным сигналом устройства формирования навигационного сигнала 34.
Процессор 44 может работать как в автономном режиме, так и в режиме регионального расширения. В автономном навигационном режиме информация, поступающая по канальному интерфейсу фидерной линии 48, не посылается в запоминающее устройство 46, и поэтому ИСЗ на средней орбите 10 передает только дальномерную информацию и информацию состояния со скоростью 50 бит/с. В режиме регионального расширения региональная вспомогательная информация RА, поступающая с канального интерфейса фидерной линии 48, подается в запоминающее устройство 46 для объединения с навигационным сигналом. В этом режиме ИСЗ на средней орбите 10 дополнительно передает информацию о целостности и состоянии спутников ГНСС 2, информацию для дифференциальной коррекции, выдаваемую служебной сетью 20, а также сигналы тревоги для индикации невозможности спутникового радиоопределения с заданной точностью, причем скорость передачи данных составляет 250 бит/с. Процессор 44 переключается в один из этих двух режимов по команде, поступающей через интерфейс ТТИУ 42. Процессор 44 может быть переключен в автономный навигационный режим в случае недоступности региональной вспомогательной информации, например, вследствие отсутствия УДС 14 в зоне видимости или вследствие поломки УДС.
В альтернативном варианте процессор 44 может формировать холостую информацию для передачи в дальномерном сигнале Rm, причем холостая информация свидетельствует навигационным приемникам 11 о том, что региональная вспомогательная информация недоступна.
Оконечное устройство спутникового радиоопределения
На фиг.4 показана упрощенная структурная схема навигационного приемника 11 для приема дальномерных и вспомогательных сигналов в описанной выше спутниковой системе радиоопределения. Пользовательское оконечное устройство 11 включает антенну 50 для приема дальномерных сигналов Rq, Rm и Rn, содержащих вспомогательную информацию А и региональную вспомогательную информацию RA. Декодер ПСШ 56 декодирует каждый дальномерный сигнал R и выдает декодированные дальномерные сигналы R' и временную информацию tа, характеризующую время прибытия каждого дальномерного сигнала. Декодер информации 58 выделяет из декодированных дальномерных сигналов информацию D, включающую вспомогательную информацию А, региональную вспомогательную информацию RA, время передачи t каждого дальномерного сигнала и эфемериды спутников. Блок радиоопределения 54 принимает информацию D и временную информацию ta, вычисляет на их основе значения ионосферных задержек, которые претерпевают двухчастотные дальномерные сигналы Rm, и приблизительные координаты навигационного приемника 11, а затем выдает эти данные в блок ионосферного моделирования 60 вместе с информацией о состоянии ионосферы, содержащейся в региональной вспомогательной информации RA и вспомогательной информации А.
На основе этих данных блок ионосферного моделирования 60 вычисляет точки прохождения ионосферы, в которых через ионосферу проходит каждый из сигналов местоопределения R, и благодаря этому оценивает ионосферную задержку для одночастотного дальномерного сигнала R, например сигнала системы GРS на частоте L1, для которого ионосферная задержка не может быть определена непосредственно. Блок ионосферного моделирования 60 выдает оценки ионосферных задержек для каждого из одночастотных дальномерных сигналов R вместе с граничными значениями ошибок полученных оценок.
Блок радиоопределения 54 принимает оценки ионосферной задержки и вычитает их из времени прибытия ta одночастотных сигналов. Непосредственно определенные значения задержек для двухчастотных дальномерных сигналов вычитаются из времени прибытия ta этих сигналов. Вспомогательная информация А и региональная вспомогательная информация RA содержат информацию об ошибках в дальномерных сигналах, которая используется для корректировки координат и временной информации в каждом из дальномерных сигналов. Вспомогательная информация А и региональная вспомогательная информация RA также содержат информацию о целостности, в которой содержатся сведения о том, является ли хотя бы один ИСЗ вышедшим из строя или функционирующим во внештатном режиме; дальномерные сигналы R с этих спутников не используются для радиоопределения.
Затем блок радиоопределения 54 на основе скорректированных дальномерных сигналов R вычисляет точные координаты Р и время Т, а также оценивает ошибки определения координат Р и времени Т из доверительных интервалов оценок ионосферных задержек, выдаваемых блоком ионосферного моделирования 60, и пределов ошибок для дальномерных сигналов, содержащихся во вспомогательной информации RА, А. Если вероятная ошибка определения координат Р и времени Т превышает допустимый уровень, то блок радиоопределения 54 может индицировать визуальное или звуковое предупреждение с тем, чтобы пользователю было известно, что выдаваемая информация может не быть пригодной для конкретных приложений.
Особенности функционирования блока ионосферного моделирования 60 поясняются со ссылками на фиг.5 и 6.
Вспомогательная информация А, передаваемая геостационарными спутниками 6, и региональная вспомогательная информация RА, передаваемая средневысотными ИСЗ 10, включает данные о состоянии ионосферы, которые содержат набор коэффициентов для вычисления ионосферных задержек для точек сети G, нанесенной на земную поверхность. Центр сети находится в надире N (совпадает с подспутниковой точкой) геостационарного ИСЗ, значение ионосферной задержки в каждой узловой точке сети gi характеризует вертикальную ионосферную задержку в данной точке сети.
Информация редко бывает доступной для всех точек сети gi, поэтому данные о состоянии ионосферы включают список адресов i точек сети gi, для которых ионосферные данные доступны, вместе с соответствующими вертикальными ионосферными задержками и ошибками измерения задержек для каждой из этих точек. Данные о состоянии ионосферы также включают положение надира N, относительно которой отцентрирована сеть.
Описанный выше формат ионосферных данных разработан для передачи с геостационарного ИСЗ, но также используется и для передачи информации о состоянии ионосферы со средневысотных спутников 10. В УДС вычисляется гипотетическое положение геостационарного спутника так, чтобы зона обслуживания средневысотного ИСЗ 10, в пределах которой этот спутник наблюдается под углом места более 5o, попадала в пределы сети точек gi, основанной на этом вычисленном положении. Ионосферные данные передаются для некоторых или для всех точек сети, которые попадают в зону обслуживания средневысотного спутника 10. Таким образом, ионосферные данные, передаваемые геостационарным 6 и средневысотными спутниками 10, имеют совместимые форматы.
Для точного оценивания ионосферных задержек каждого дальномерного сигнала R блоком ионосферного моделирования 60 навигационного приемника 11 должна вычисляться точка прохождения РР, в которой дальномерный сигнал R проходит сквозь ионосферу на пути к пользователю, и ионосферная задержка должна вычисляться именно для этой точки прохождения.
Как показано на фиг.6, дальномерный сигнал R передается спутником, например одним из средневысотных спутников 10, находящимся под углом места ε относительно навигационного приемника 11. Дальномерный сигнал R проходит ионосферный слой с максимальной электронной концентрацией Iо в точке прохождения РР. Высота Н ионосферного слоя Iо полагается равной 400 км над земной поверхностью. Навигационный приемник может грубо оценить свои координаты на основе неоткорректированного дальномерного сигнала R, который содержит также сведения о положении спутника 10. На основе этой информации и учитывая радиус Земли r, известным способом вычисляется долгота и широта точки прохождения РР.
Вычисленная точка прохождения РР в общем случае не совпадает ни с одной из узловых точек сети gi, для которой имеются данные о состоянии ионосферы. Поэтому значение ионосферной задержки должно быть получено путем интерполяции между узловыми точками сети gi и gi+1, в которых имеется ионосферная информация. Блок ионосферного моделирования 60 формирует моделирующую (аппроксимирующую) функцию, которая с помощью одного или нескольких параметров подгоняется под ионосферные данные в окружающих точках сети gi, а затем используется для интерполяции ионосферной задержки в точке прохождения РР.
Подходящая модель для интерполяции ионосферных задержек установлена для WAАS. В этой модели значения ионосферных задержек в четырех узловых точках сети, соответствующих углам ячейки, в которую попадает точка прохождения РР, используются для интерполяции значения ионосферной задержки в точке прохождения на основе весовой функции, обеспечивающей непрерывную поверхность как функцию географической широты и долготы. В альтернативном варианте, между парами точек по долготе и широте может быть выполнена линейная интерполяция.
Кроме того, блок ионосферного моделирования 60 может подгонять моделирующую функцию под непосредственно измеренные значения ионосферной задержки, полученные с использованием двухчастотных дальномерных сигналов Rm, путем вычисления точек прохождения РР для этих сигналов и регулировки параметров моделирующей функции так, чтобы привести ее в соответствие измеренным ионосферным задержкам в этих точках прохождения РР.
Моделирующая функция не требует точной подгонки под ионосферные данные и измеренные значения задержки; наоборот, осуществляется приблизительная подгонка типа аппроксимации с использованием метода наименьших квадратов.
Таким образом вычисляется значение вертикальной ионосферной задержки в точке прохождения. Однако дальномерный сигнал R проходит в ионосфере путь длиной 1, которая превышает вертикальную высоту ионосферы, в результате чего трасса дальномерного сигнала R образует с вертикалью угол падения d. Поэтому для учета такого увеличения длины пути сигнала в ионосфере вертикальная ионосферная задержка умножается на коэффициент наклонного падения.
Пример использования системы
Далее приводится характерный пример функционирования альтернативного варианта реализации спутниковой системы радиоопределения, которая обеспечивает навигационное обслуживание Африки, в которой геостационарный спутник 6 формирует дальномерный сигнал Rg и вспомогательную информацию А, включающую корректирующие сообщения для дальномерных сигналов Rn спутников ГНСС, но в этой реализации через геостационарные ИСЗ 6 не передается информация для выполнения ионосферной коррекции, так как отсутствует соответствующая информация для Африканского континента в целом.
Однако в Кении в рамках локальной службы установлены региональные контрольные станции. Контрольные станции контролируют дальномерные сигналы средневысотных спутников 10 и спутников ГНСС 2, кроме того, принимают вспомогательную информацию А, передаваемую геостационарным спутником 6. На основе этой информации оцениваются значения вертикальных ионосферных задержек и ошибки определения этих значений, которые могут быть использованы всеми пользователями на территории Кении и в ее воздушном пространстве. Эта информация поступает в УДС 14 для передачи через средневысотный спутник 10, зона обслуживания которого в данный момент времени покрывает территорию Кении.
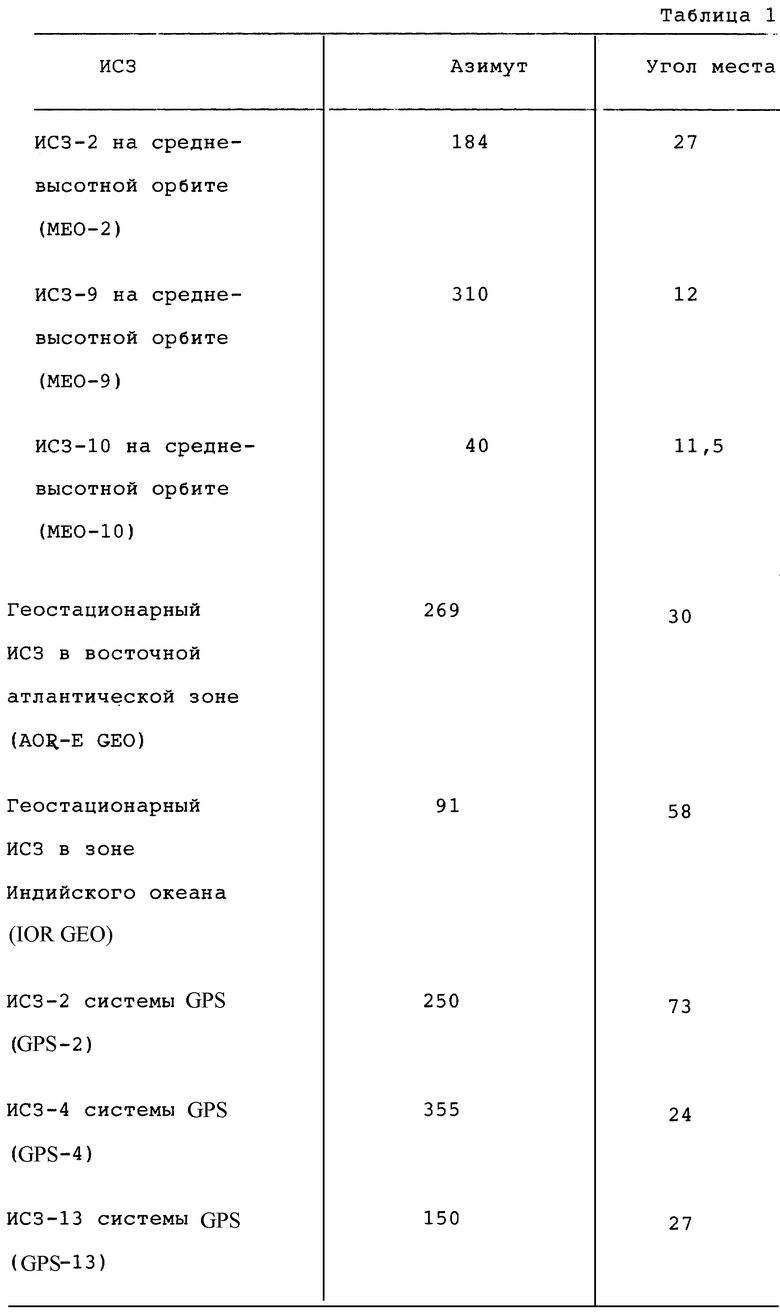
Пример навигационных ИСЗ, наблюдаемых навигационным приемником, расположенным близ г. Найроби, показан в табл.1.
Геостационарным спутником в восточной зоне Атлантического океана (AOR-E) является ИСЗ Inmarsat (TM), обслуживающий восточно-атлантический регион, а спутник IOR обслуживает зону Индийского океана.
Навигационный приемник может приблизительно определять положение всех приведенных выше спутников с использованием дальномерных сигналов, формируемых или ретранслируемых спутниками, причем ионосферная коррекция при этом не осуществляется. Оценки ионосферных задержек дальномерных сигналов каждого из спутников получаются следующим образом.
Ионосферные задержки, непосредственно вычисленные с использованием двухчастотных дальномерных сигналов, передаются средневысотными спутниками МЕО-2, МЕО-9 и МЕО-10. Выявляется, что геостационарный ИСЗ AOR-E находится в том же квадранте, что и ИСЗ МЕО-9. После компенсации разницы в углах места спутников МЕО-9 и AOR-E значение ионосферной задержки в дальномерном сигнале ИСЗ МЕО-9 используется для оценивания ионосферной задержки дальномерного сигнала геостационарного ИСЗ AOR-E. Ионосферные задержки спутников GPS-4 и GPS-13 рассчитываются подобным образом с использованием значений ионосферной задержки, измеренных для МЕО-9.
ИСЗ GРS-2 находится приблизительно в зените и поэтому используется информация об ионосферных задержках, поставляемая кенийскими контрольными станциями, с выполнением небольшой корректировки, направленной на компенсацию разности между действительным углом места ИСЗ 72o и направлением в зенит 90o. Для каждого из значений ионосферной задержки, полученных не непосредственно с использованием двухчастотного дальномерного сигнала, получают погрешность определения ионосферных задержек.
В этом примере навигационный терминал 11 принимает дальномерные сигналы восьми различных спутников и определяет или оценивает ионосферную задержку для каждого дальномерного сигнала без привлечения вспомогательной информации А о состоянии ионосферы. Кроме того, информация о целостности, принимаемая с геостационарных спутников, используется для выявления дальномерных сигналов, которые не могут быть использованы при спутниковом радиоопределении. Таким образом, результат радиоопределения является точным и достоверным.
Региональная вспомогательная информация
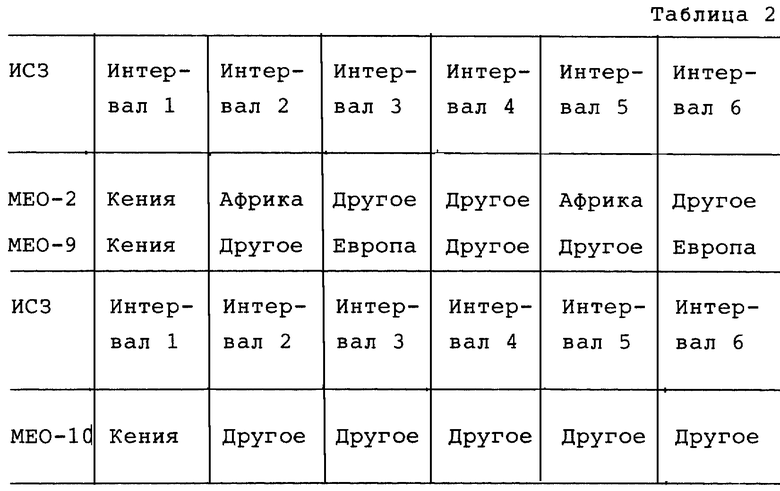
В приведенном выше примере информация об ионосферных задержках, которая применима на территории Кении, передается через один или несколько средневысотных спутников 10. Зона обслуживания каждого из средневысотных ИСЗ выходит далеко за пределы территории Кении, например, и УДС 14 принимает как информацию, передаваемую кенийской службой, так и информацию других сетей. В передачах УДС 14 информации каждой из сетей выделяется свой временной интервал в повторяющемся временном кадре так, что данные от различных сетей контроля мультиплексируются с разделением по времени. В табл.2 показан пример распределения временных интервалов для каждого из спутников МЕО-2, МЕО-9 и МЕО-10 в вышеприведенном примере.
ИСЗ МЕО-2 в интервалах 2 и 5 передает региональную вспомогательную информацию, которая применима по всей территории Африканского континента и которая может быть использована в качестве дополнительной навигационным приемником 11, расположенным в Кении.
Каждый временной интервал может иметь продолжительность, например, 1 с в 6-секундном временном кадре и содержать 250 бит информации.
Интервалы могут выделяться УДС 14 различным службам (сервисным терминалам) в те моменты времени, когда подспутниковая точка средневысотного спутника 10, несущего региональную вспомогательную информацию, проходит через заданный регион, выделенный данной службе и заданный, например, граничными значениями широты и долготы. Например, каждый регион может содержать 5-градусную долготную полосу в северном или южном полушариях.
Каждый интервал могут делить между собою несколько служб, которые по отдельности не обеспечивают информации, достаточной для того, чтобы занять весь интервал; делается это для полного использования пропускной способности каждого временного интервала. Информация от каждой службы в пределах интервала идентифицируется при помощи кода, связанного с этой службой. Если службе требуется пропускная способность, большая, чем может обеспечить один временной интервал, то ей выделяется несколько интервалов. Информация о загрузке для вычисления загрузки службы (сервисного терминала) формируется в соответствии с продолжительностью времени, на протяжении которого пропускная способность средневысотного ИСЗ 10 выделяется службе, а также в соответствии с той частью пропускной способности, которая использовалась на протяжении этого интервала времени.
В альтернативном варианте интервалы могут выделяться службам в периоды времени, на протяжении которых средневысотный ИСЗ виден из зоны обслуживания, в которой служба обеспечивает региональную вспомогательную информацию RA, под углом места более, например, 5o.
Желательно, чтобы региональная вспомогательная информация в каждом временном интервале кодировалась, благодаря чему эта информация будет доступна только лицензионным навигационным приемникам 11. Все лицензионные приемники могут использовать одинаковые алгоритмы радиоопределения с использованием информации об ионосферных задержках так, чтобы радиоопределение выполнялось по общему стандарту.
Кроме того, можно обязать пользователей приобретать специальные ("интеллектуальные") карточки, которые необходимо вставлять в навигационный приемник 11 для обеспечения доступа к части или ко всей региональной вспомогательной информации RA, передаваемой средневысотными спутниками. В этом случае службами может собираться некоторый доход. В другом варианте пользовательские терминалы могут быть оснащены клавиатурами для набора кода, который обеспечивает доступ к одному или нескольким временным интервалам с региональной вспомогательной информацией.
В этом случае обеспечивается доступ разных пользователей к различной информации в зависимости от области, в пределах которых пользователю необходима ионосферная информация, или от необходимой точности радиоопределения, при этом пользователю передается только необходимая информация.
В приведенном примере для различных типов вспомогательной информации использовано мультиплексирование с временным разделение. Однако мультиплексирование различных информационных каналов может быть осуществлено и другими хорошо известными способами, как, например, с использованием кодового или частотного разделения.
Данные в каждом канале передачи региональной вспомогательной информации могут содержать данные типа кода страны для идентификации области, для которой применимы ионосферные данные, данные о достоверности информации о состоянии ионосферы, а также данные о том, в течение какого времени информация о состоянии ионосферы может использоваться.
Так как блок моделирования ионосферных задержек 60 навигационного приемника 11 может объединять информацию об ионосферных задержках с данными прямых ионосферных измерений, то для компенсации ионосферных задержек используется более точная модель. Более того, принимается региональная вспомогательная информация RА, которая применима в локальной области, в которой расположен навигационный приемник 11. Информация о целостности и погрешностях измерения содержится как в региональной вспомогательной информации RA, так и во вспомогательной информации А. В этом случае может быть выполнено высокоточное считывание координат Р и времени Т вместе с оцениванием погрешностей этого считывания и выдачей предупреждения в случае выхода точности за пределы заданного порогового значения.
Такое точное и достоверное радиоопределение значительно расширяет область потенциального применения спутникового радиоопределения.
Например, описанная выше система спутникового радиоопределения может быть использована в случаях, когда предъявляются повышенные требования к безопасности, например, в системах посадки самолетов в условиях ограниченной видимости. Система имеет также морские применения, в которых необходимо обеспечивать требуемую точность плавания в порту при ограниченной видимости, а также может использоваться при управлении поездами, когда заданная точность требуется для определения пути, по которому движется поезд. Система может обеспечивать точное считывание времени для использования в лабораториях или системах связи, в которых требуется точная синхронизация.
Так как дальномерная и вспомогательная информация формируется на спутнике, то можно избежать установки наземных систем дифференциальной коррекции.
Несмотря на то что в предложенной реализации используются средневысотные спутники типа спутников ICO (ТМ), могут использоваться другие созвездия спутников систем связи типа ODYSSEY (ТМ), IRIDIUM (ТМ), GLOBALSTAR (ТМ) и TELEDESIC (ТМ). Сигналы спутников на низких околоземных орбитах имеют больший доплеровский сдвиг частоты, который, однако, может быть устранен в приемниках путем соответствующей компенсации. Конфигурации спутников, описанные в реализации, являются наиболее предпочтительными, однако могут использоваться и другие конфигурации. Например, оборудование для автономного формирования навигационных сигналов может быть заменено ответчиком для ретрансляции навигационных сигналов спутниками, находящимися на негеостационарных орбитах. Региональная вспомогательная информация может передаваться геостационарными или негеостационарными спутниками, имеющими несколько узких лучей, причем таких, что в каждом из лучей передается информация, применимая в данной области, а зона обслуживания луча совпадает с границами этой области.
Навигационные приемники могут определять свою высоту при помощи карты высот, на которой представлена зависимость высоты над уровнем моря от широты и долготы точки, или при помощи барометрического давления, причем всего лишь три дальномерных сигнала необходимы для определения широты, долготы и времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ МАКСИМАЛЬНО ПРИМЕНИМОЙ ЧАСТОТЫ ДЛЯ ИОНОСФЕРНОЙ РАДИОСВЯЗИ | 2012 |
|
RU2516239C2 |
| Способ зондирования ионосферы и тропосферы | 2018 |
|
RU2693842C1 |
| СПОСОБ ВЫСОКОТОЧНЫХ ИЗМЕРЕНИЙ ТРАЕКТОРНЫХ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА В ЛЕТНЫХ ИССЛЕДОВАНИЯХ НА ТРАССАХ БОЛЬШОЙ ПРОТЯЖЕННОСТИ | 2008 |
|
RU2393430C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ПЛАЗМЕННОГО СЛОЯ ГЕОМАГНИТНОГО ХВОСТА И ИОНОСФЕРЫ ЗЕМЛИ | 2017 |
|
RU2656617C1 |
| СПОСОБ ЗОНДИРОВАНИЯ ИОНОСФЕРЫ, ТРОПОСФЕРЫ, ГЕОДВИЖЕНИЙ И КОМПЛЕКС ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2502080C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ЭПИЦЕНТРАЛЬНОЙ ЗОНЫ ИСТОЧНИКА И СКОРОСТИ РАСПРОСТРАНЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ИОНОСФЕРНЫХ ВОЗМУЩЕНИЙ | 2014 |
|
RU2560525C1 |
| СПОСОБ, УСТРОЙСТВО И СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ ПОЗИЦИИ ОБЪЕКТА, ИМЕЮЩЕГО ПРИЕМНИК ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ, ПОСРЕДСТВОМ ОБРАБОТКИ НЕРАЗНОСТНЫХ ДАННЫХ, ПОДОБНЫХ ИЗМЕРЕНИЯМ ФАЗЫ НЕСУЩЕЙ, И ВНЕШНИХ ДАННЫХ, ПОДОБНЫХ ИОНОСФЕРНЫМ ДАННЫМ | 2011 |
|
RU2565386C2 |
| СПОСОБ АВТОНОМНОГО СНИЖЕНИЯ ПОРОГОВ ОБНАРУЖЕНИЯ И ОТСЛЕЖИВАНИЯ НЕСУЩИХ СИГНАЛОВ, ПРИНИМАЕМЫХ НА ОРБИТЕ | 1997 |
|
RU2187127C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМУЩЕНИЙ ИОНОСФЕРЫ, ВЫЗВАННЫХ ЗАПУСКАМИ КОСМИЧЕСКИХ АППАРАТОВ | 2016 |
|
RU2624911C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
Система спутникового радиоопределения включает спутники глобальной навигационной службы (ГНСС), как, например, спутники системы GPS, которые формируют дальномерные сигналы ГНСС Rn, геостационарные спутники, которые ретранслируют дальномерные сигналы Rn, сформированные в навигационной земной станции, содержащие вспомогательную информацию А, а также среднеорбитальные спутники, которые формируют дальномерные сигналы Rm, содержащие региональную вспомогательную информацию RA, передаваемую из узла доступа к спутникам. Региональная вспомогательная информация RA поступает из региональных систем расширения зоны обслуживания. Навигационный приемник принимает дальномерные сигналы Rq, Rm, Rn и вычисляет значения ионосферных задержек для каждого дальномерного сигнала, передаваемого на двух частотах. Используя эти значения ионосферных задержек, а также, хотя и не обязательно, региональную вспомогательную информацию RA и вспомогательную информацию А, навигационный приемник оценивает значения ионосферных задержек для дальномерных сигналов, передаваемых на одной частоте. Для точного вычисления координат и времени навигационный приемник использует дальномерные сигналы с откорректированной ионосферной задержкой и исправленными ошибками, о которых сообщается во вспомогательной информации А и региональной вспомогательной информации А и региональной вспомогательной информации RA, что и является достигаемым техническим результатом. 11 с. и 14 з.п. ф-лы, 6 ил., 2 табл.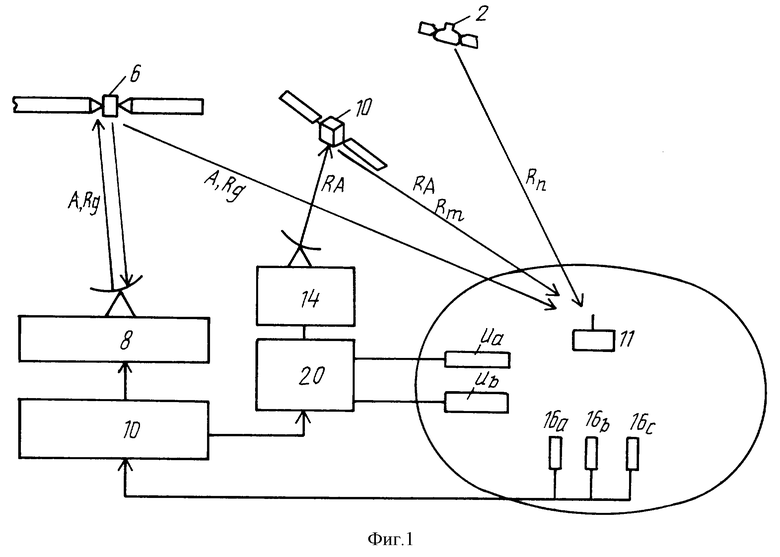
| Исполнительный механизм подачи бурового инструмента | 1974 |
|
SU522322A1 |
| КОТЯШКИН С.И | |||
| Определение ионосферной задержки сигналов в одночастотной аппаратуре потребителя спутниковой системы навигации NAVSYAR | |||
| - Зарубежная радиоэлектроника, №2, 1989, - М.: Радио и связь, с.86-87, рис.1-3 | |||
| US 5276451 A, 04.01.1994 | |||
| АППАРАТ ДЛЯ НЕПРЕРЫВНОЙ ОБРАБОТКИ ТЕКСТИЛЬНЫХ НИТЕЙ ГАЗООБРАЗНЫМИ АГЕНТАМИ ПОД ДАВЛЕНИЕМ | 0 |
|
SU242115A1 |

