Изобретение относится к электротехнике, может применяться в подъемно-транспортных механизмах, например в системах перемещения грузов.
Интенсивное развитие транспорта, строительной и грузоподъемной техники требует создания современных систем управления такими машинами. Они должны сократить время перегрузки при существенных ограничениях, в частности - раскачивание груза. Развитие преобразовательной техники и создание новых чувствительных элементов (датчиков) позволяет решать эти задачи на современном техническом уровне. Во многих грузоподъемных машинах используются асинхронные двигатели, регулирование и контроль координат которых простыми методами затруднен.
Известно техническое решение (см. патент РФ №208948. Опубл. 10.03.1997), в котором предлагается использовать устройство, содержащее подпружиненные V-образные рычаги, взаимодействующие с поднимаемым грузом посредством боковых упоров в виде лепестков, оснащенных роликами.
Недостатком данного технического решения является то, что он имеет сложную механическую конструкцию.
Известно техническое решение (см. патент РФ №2347736. Опубл. 27.02.2009), содержащее бортовой микропроцессорный блок управления. Недостатком данного технического решения является то, что не отслеживаются параметры груза и степень раскачивания груза.
Известно техническое решение (см. патент РФ №2406679. Опубл. 20.12.2010), которое содержит цифровое вычислительное устройство и датчики координат.
Недостатком данного технического решения является то, что не учитывается степень раскачивания груза в процессе перемещения.
Наиболее близким техническим решением является устройство (см. заявка РФ №2006106630. Опубл. 10.10.2007), которое содержит блок органов управления движениями, датчики нагрузки, длины стрелы, угла наклона стрелы, поворота, длины каната, блок ограничения перемещения, блок определения высоты подвеса груза, блок определения периода раскачивания подвешенного груза, блок вычисления ускорений.
Недостатком этого решения является большое количество датчиков и исполнительных физических блоков, что значительно усложняет конструкцию.
Задачей предлагаемого изобретения является создание электропривода перемещения с ограничением по раскачиванию груза.
Техническим результатом является ограничение раскачивания груза при перемещении.
Технический результат достигается тем, что электропривод содержит датчик.
Особенностью является то, что он снабжен датчиком ускорения по трем осям, расположенным на механизме подвеса, и вычислителем координат, при этом выход пульта оператора соединен с первым входом системы управления; выход датчика ускорения по трем осям соединен с входом вычислителя координат, выход вычислителя координат соединен со вторым входом системы управления; выход датчика момента подключен к третьему входу системы управления, при этом выход системы управления подключен к входу преобразователя напряжения, который соединен с обмотками асинхронного двигателя, а вал асинхронного двигателя соединен с механизмом подвеса и с датчиком момента, на механизме подвеса установлен датчик ускорения по трем осям.
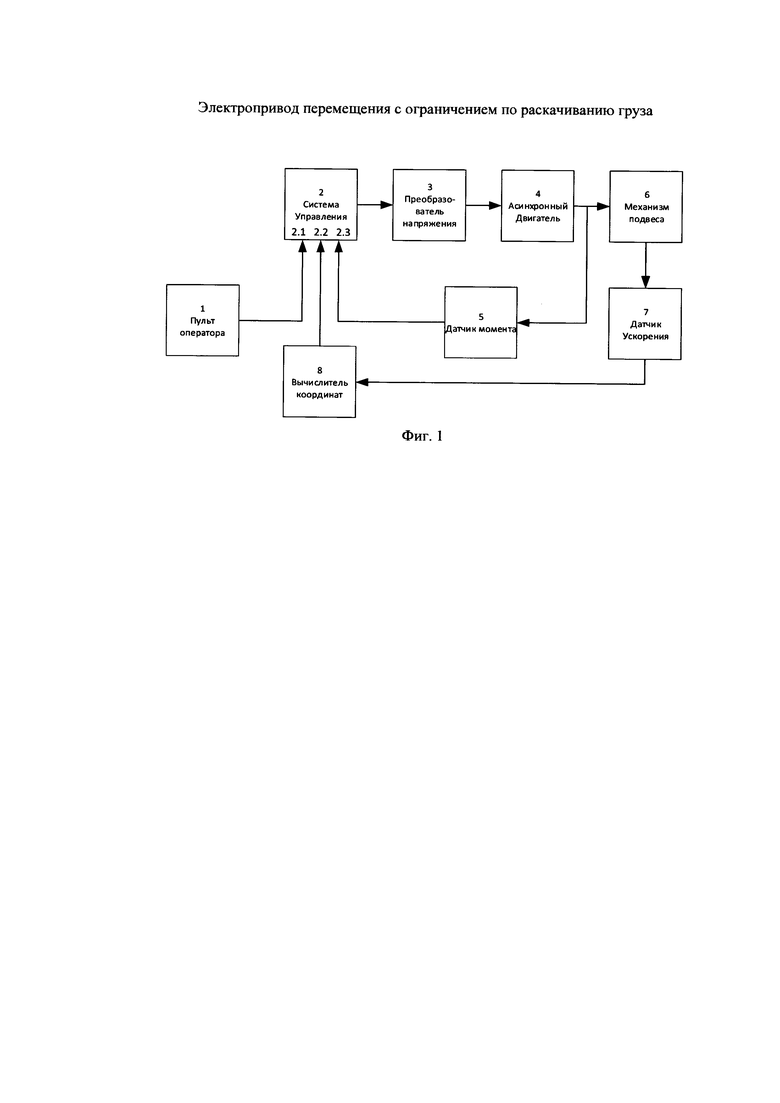
Предлагаемое техническое решение поясняется чертежами, где на фиг. 1. представлена функциональная схема электропривода с ограничением по раскачиванию груза, и на фиг. 2 представлены графики переходных процессов.
Электропривод перемещения с ограничением по раскачиванию груза содержит в себе пульт 1 оператора, предназначенный для задания направления и скорости движения механизма подвеса, выход которого соединен с входом 2.1 системы 2 управления. Выход системы 2 управления подключен к входу преобразователя 3 напряжения, его выход соединен с обмотками асинхронного двигателя 4. Вал асинхронного двигателя 4 соединен с механизмом 6 подвеса и датчиком 5 момента. На механизме 6 подвеса установлен датчик 7 ускорения по трем осям. Сигнал с выхода датчика 7 ускорения по трем осям поступает на вход вычислителя 8 координат, который вычисляет положение механизма 6 подвеса в каждый момент времени. Выход вычислителя 8 координат соединен с входом 2.2 системы 2 управления. Выход датчика 5 момента подключен к входу 2.3 системы 2 управления.
Устройство работает следующим образом: система 2 управления оценивает состояние механизма 6 подвеса в пространстве и в совокупности с управляющими командами с пульта 1 оператора вырабатывает управляющий сигнал на преобразователь 3 напряжения. В случае превышения параметров допустимого значения пространственного положения механизма 6 подвеса система 2 управления формирует управляющие сигналы на преобразователь 3 напряжения и асинхронный двигатель 4 в целях корректировки и стабилизации положения механизма 6 подвеса.
Вычислитель 8 координат находит угол смещения по формуле (1), значение скорости по формуле (2) и момента двигателя по формуле (3).



где KV и TV - коэффициент и постоянная времени апериодического звена,
KTP1 - коэффициенты трения для тележки, KРЕД - коэффициент редуктора, p - оператор Лапласа.

где α=1+m/M, L - длина подвеса, g - ускорение свободного падения.
m/М - отношение массы тележки к массе механизма подвеса.
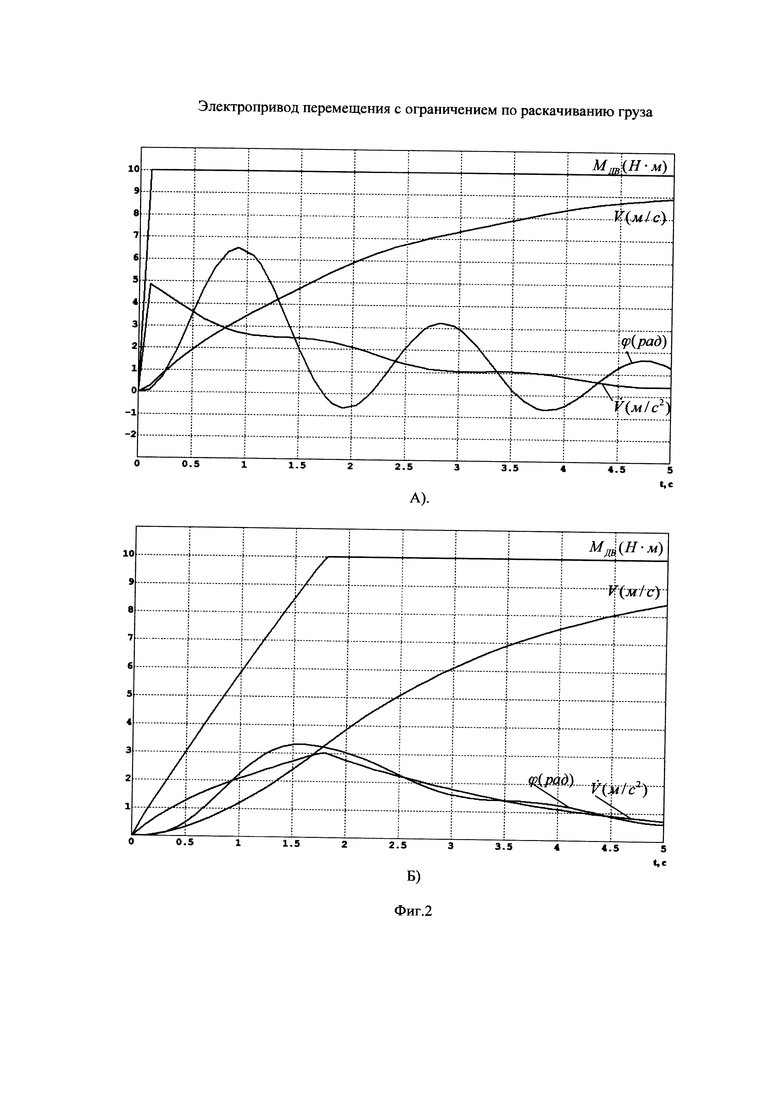
На фиг. 2(a) показан график переходного процесса без обратных связей, на фиг. 2(б) показан график переходных процессов с обратной связью. Вывод: из представленных на фиг. 2 графиков переходных процессов видно, что технический результат достигнут за счет действия предлагаемого электропривода перемещения с ограничением по раскачиванию груза, кроме ограничения раскачивания, из фиг. 2 видно, что переходный процесс по ускорению и раскачиванию заканчивается быстрее.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ РАСКАЧИВАНИЯ ГРУЗА НА ГИБКОМ ПОДВЕСЕ (ВАРИАНТЫ) | 2009 |
|
RU2406679C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2010 |
|
RU2440924C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| Автоматизированный дистанционно управляемый подъемный крюк | 2023 |
|
RU2809751C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС ДЛЯ ПОДГОТОВКИ КОСМОНАВТОВ (АСТРОНАВТОВ) К ВНЕКОРАБЕЛЬНОЙ ДЕЯТЕЛЬНОСТИ (ВАРИАНТЫ) | 2013 |
|
RU2524503C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| СПОСОБ УПРАВЛЕНИЯ ПОДЪЕМНЫМ КРАНОМ | 2012 |
|
RU2574047C2 |
| Электропривод | 1985 |
|
SU1312712A1 |
| ФУНКЦИОНАЛЬНО-МОДЕЛИРУЮЩИЙ СТЕНД ДЛЯ СОЗДАНИЯ УСЛОВИЙ ИНТЕРАКТИВНОГО БЕЗОПОРНОГО ПРОСТРАНСТВА И ПОНИЖЕННОЙ ГРАВИТАЦИИ | 2012 |
|
RU2518478C2 |
| Способ регулирования координат взаимосвязанных электроприводов | 2017 |
|
RU2655723C1 |
Изобретение относится к конструктивным элементам кранов. Электропривод перемещения с ограничением по раскачиванию груза содержит датчик ускорения по трем осям, расположенный на механизме подвеса, и вычислитель координат. При этом выход пульта оператора соединен с первым входом системы управления. Выход датчика ускорения по трем осям соединен с входом вычислителя координат, а выход вычислителя координат соединен со вторым входом системы управления. Выход датчика момента подключен к третьему входу системы управления. При этом выход системы управления подключен к входу преобразователя напряжения, который соединен с обмотками асинхронного двигателя. Вал асинхронного двигателя соединен с механизмом подвеса и с датчиком момента. На механизме подвеса установлен датчик ускорения по трем осям. Технический результат заключается в ограничении раскачивания груза при перемещении. 2 ил.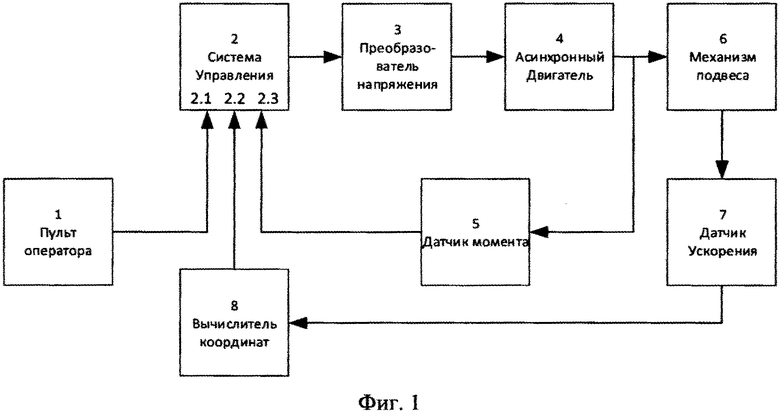
Электропривод перемещения с ограничением по раскачиванию груза, содержащий датчик, отличающийся тем, что он снабжен датчиком ускорения по трем осям, расположенным на механизме подвеса, и вычислителем координат, при этом выход пульта оператора соединен с первым входом системы управления; выход датчика ускорения по трем осям соединен со входом вычислителя координат, выход вычислителя координат соединен с вторым входом системы управления; выход датчика момента подключен к третьему входу системы управления, при этом выход системы управления подключен к входу преобразователя напряжения, который соединен с обмотками асинхронного двигателя, а вал асинхронного двигателя соединен с механизмом подвеса и с датчиком момента, на механизме подвеса установлен датчик ускорения по трем осям.
| Вибропрессовальвая штукатурная машина | 1952 |
|
SU98752A1 |
| СПОСОБ УМЕНЬШЕНИЯ РАСКАЧИВАНИЯ ГРУЗА ПРИ ПОДЪЕМЕ СТРЕЛОВЫМ КРАНОМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2422354C1 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2309112C1 |
| WO 2013041770 A1, 28.03.2013 | |||
| DE 10008235 A1, 06.09.2001. | |||

