Предлагаемое изобретение относится к укладочной технике и может быть использовано в упаковочных линиях, например, для послойной укладки мучнисто-кондитерских, молочных, мясных и других продуктов в торговую тару.
Для реализации многослойной укладки известен ряд устройств, содержащих подъемник т, периодически опускающий тару на высоту продукта. (Патент RU №135621 U1 МПК B65B 5/10, 2013 г. Патент RU №2378168 C2 МПК B65B 5/10, 2007 г.) Его наличие усложняет конструкцию, а также снижает надежность ее работы.
Известно также устройство для укладки штучных продуктов (Robotic stacker of piece products / Pavlov A.E., Sorokin S.V., Pavlova L.A. // European Science and Technology [Text]. Materials of the VI international research and practice conference. Vol. 1, Munich-Germany, 2013. P. 16-23. -ISBN 978-3-941352-29-2 - прототип), механизм укладки которого содержит два ползуна, совершающих возвратно-поступательное циклическое движение по неподвижной горизонтальной направляющей, а также два шатуна, каждый из которых шарнирно связан с соответствующим ползуном. При этом шатуны также шарнирно соединены между собой. Выходным звеном в данном механизме служит шатун, на конце которого установлен вакуумный схват с присосками. Работа устройства осуществляется следующим образом. Ползуны, являясь ведущими звеньями, приводятся в движение от двух серводвигателей, управление которыми выполняет программируемый контроллер. В начальном положении схват находится над продуктом на подающем транспортере. Под действием созданного вакуума схват захватывает продукт и осуществляет рабочий ход по криволинейной траектории до остановки над тарой, расположенной на транспортере упаковочной машины. После снятия вакуума продукт освобождается от присосок и помещается в тару. Холостой ход к начальному положению схвата осуществляется при реверсивном движении ползунов.
Недостатками этого устройства являются невозможность многослойной укладки продукта и, следовательно, незначительная производительность, жесткие динамические удары в моменты реверсирования двигателей, а также отличный от вертикали угол опускания продукта в тару, что снижает надежность работы данного устройства.
Задача предлагаемого изобретения - повысить производительность и надежность работы устройства.
Технический результат - обеспечить многослойную укладку продуктов без дополнительного подъемника тары.
Сущность изобретения заключается в том, что предлагаемое устройство для послойной укладки продуктов в тару содержит транспортеры подачи продукта, его отвода в упаковочную машину, механизм укладки продуктов в тару, снабженный вакуумным схватом с присосками и систему автоматического управления. Механизм укладки состоит из двух серводвигателей, приводящих последовательно соединенные синусные механизмы, к выходным звеньям которых смонтирован четырехзвенный шарнирный механизм, оснащенный вакуумным схватом, перемещающимся без динамических ударов. При этом второй серводвигатель установлен на выходном звене первого синусного механизма и четырехзвенный шарнирный механизм выполнен в виде параллелограмма со стабильным горизонтальным положением плоскости удержания продукта над подающим и отводящим транспортерами. Кроме того, структура и кинематика механизма укладки воспроизводят траекторию схвата при многослойной укладке продукта близкую к вертикали, что значительно повышает надежность его работы и производительность и надежность работы устройства.
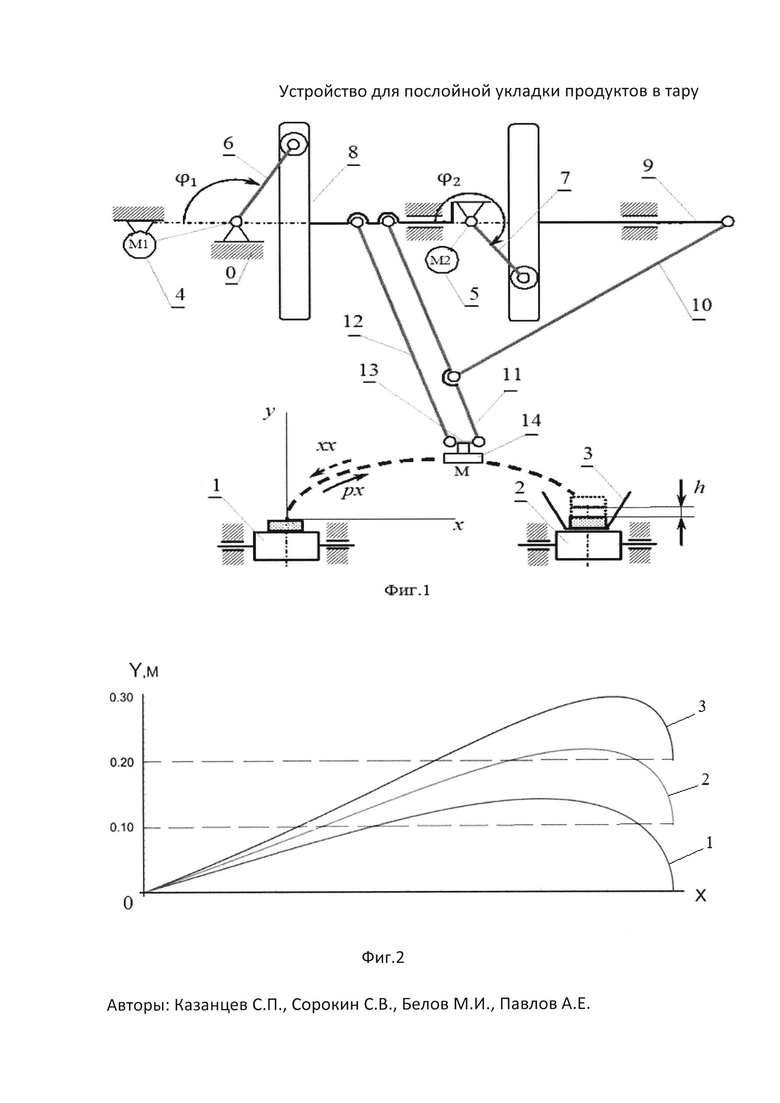
Устройство поясняется чертежом. На фиг. 1 представлена схема устройства; на фиг. 2 - траектории центра схвата при укладке первого слоя, второго, третьего.
Устройство для послойной укладки продуктов в тару содержит (фиг. 1) станину 0, периодически движущийся транспортер 1 подачи продукта, также шаговый, синхронно движущийся с первым транспортер 2 подачи тары 3, серводвигатели с редукторами 4, 5, кривошипы 6, 7 и ползуны (выходные звенья) 8, 9 двух синусных механизмов, шатун 10, шатуны 11, 12, 13, образующие параллелограмм, и вакуумный схват 14.
Система автоматического управления состоит из датчиков наличия продукта на подающем транспортере 1 и тары на транспортере 2 упаковочной машины, величины вакуума в присосках и программируемого двухосного контроллера, задающего перемещения выходных звеньев 8, 9 синусных механизмов. В случае отсутствия продукта или тары работа устройства блокируется. Эта система также обеспечивает создание вакуума в присосках при захвате продукта и сброс вакуума при его помещении в тару. Вакуумный схват, гарантирующий сохранение формы и структуры низкопрочных продуктов (печенье, кекс, пастила и др.), представляет собой тонкую прямоугольную коробку, снабженную легкодеформируемыми силиконовыми присосками. Коробка присоединена к вакуумной системе, содержащей гибкий шланг и вакуумный насос. Глубина вакуума в коробке назначается с учетом массы продукта, числа присосок, диаметра отдельной присоски и ускорения коробки при рабочем ходе. Высокая надежность и качество укладки такой продукции могут быть обеспечены только при безударном движении схвата с сохранением его горизонтальной ориентации. Наличие синусных механизмов позволяет воспроизвести безударные законы движения звеньев и схвата. Требуемая стабильная ориентация схвата достигается тем, что в механизм укладки вводится четырехзвенный шарнирный механизм в виде параллелограмма.
Механизм укладки работает следующим образом.
Кривошип 6 получает вращательное движение через редуктор от серводвигателя 4, а кривошип 7 соответственно от аналогичного двигателя 5. Двигатель 4, его редуктор и кривошип 6, установленные на станине 0, приводят в возвратно-поступательное движение ползун 8. Двигатель 5, его редуктор и кривошип 7, смонтированные на выходном звене 8 первого синусного механизма, также сообщают возвратно-поступательное движение ползуну 9. Кинематическая связь кривошипов 6,7 с выходными звеньями 8, 9 осуществляется посредством роликов.
Таким образом, выходное звено 9 второго синусного механизма совершает составное движение, которое можно представить в виде суммы переносного с кинематическими параметрами звена 8 и относительного (при мысленно неподвижном ползуне 8) с параметрами звена 9. Задаваемые системой управления перемещения ползунов 8, 9 определяют положение параллелограмма 11, 12, 13 и одновременно траекторию (фиг. 2) центра M схвата.
Углы поворота кривошипов 6 и 7 согласованы и они вращаются по законам:
φ1(t)=ωt; φ2(t)=2ωt,
здесь ω - угловая скорость кривошипа 6.
Кинематический цикл - Τ=tpx+txx состоит из времени рабочего хода (px) в пределах 
При групповой однослойной укладке в коробку, например, 4 штук и производительности 
φ1(t)=0; φ2(t)=0,
то есть оба ведущих звена 6 и 7 находятся в левом горизонтальном положении.
В течение рабочего хода (tpx=1c) схват 14 осуществляет захват продуктов на транспортере 1, их перемещение и укладку в тару 3, расположенную на транспортере 2. За это время углы поворота кривошипов составят:
φ1(t)=π, то есть кривошип 6 займет крайнее правое положение;
φ2(t)=2π, что означает возврат кривошипа 7 в начальное положение.
После снятия разряжения в присосках продукты оказываются в таре 3.
За время холостого хода (txx=1c) при одностороннем вращении кривошипов 6, 7 происходит возврат схвата в начальное положение, при котором φ1(t)=0, φ2(t)=0 и оба кривошипа располагаются в левом предельном положении. В течение этого времени транспортер 1 подает очередную группу продуктов, а транспортер 2 новую тару. В случае однослойной укладки по схеме 4×1 полный рабочий цикл, соответствующий указанной производительности, с учетом времени последовательной подачи двух тар составит 8c.
Повышение производительности предлагаемого устройства обеспечивается за счет многослойной укладки продуктов без дополнительного подъемника тары.
Заявляемый технический результат достигается следующим образом.
Программируемый контроллер подает на серводвигатели 4 и 5 управляющие сигналы, которые определяют представленные функции перемещений ползунов 8 и 9:

Здесь P1, Ρ2, P3 - параметры, зависящие от числа слоев в таре и высоты продукта h.
Если рабочий цикл (время заполнения одной тары) включает трехслойную укладку, то для первого кинематического цикла (продукты помещаются на дно тары) в контроллер вводятся указанные параметры при h=0, для второго цикла другие параметры, например, при h=0,1 м и для третьего цикла соответственно h=0,2 м. Рабочий цикл предлагаемого устройства при той же производительности и одинаковом кинематическом цикле для схемы укладки 4×3 будет равен 6c.
Таким образом, производительность заявляемого устройства больше на 25%.
Структура и кинематика механизма укладки позволяют воспроизводить семейство траекторий центра M схвата при многослойной укладке продукта в тару близкую к вертикале, что значительно повышает надежность его работы.
Таким образом, предлагаемое изобретение содержит существенные отличия, обеспечивающие повышение производительности и надежности работы устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пищевой масложировой продукт функционального назначения | 2019 |
|
RU2733289C2 |
| Устройство для дезинфекции доильных аппаратов | 2022 |
|
RU2786161C1 |
| Функциональный напиток на основе пахты | 2019 |
|
RU2727056C1 |
| Способ выращивания зеленных гидропонных кормов | 2019 |
|
RU2727329C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЯ | 2016 |
|
RU2662017C2 |
| Способ создания безоболочных мелиоративных водоводов-влагообменников | 2021 |
|
RU2762404C1 |
| Биоразлагаемое пищевое пленочное покрытие | 2024 |
|
RU2836058C1 |
| Напиток на основе пахты | 2021 |
|
RU2772988C1 |
| Малогабаритный комбикормовый агрегат | 2019 |
|
RU2705779C1 |
| Безалкогольный напиток "Цветущий сад" | 2017 |
|
RU2656893C1 |
Изобретение относится к агропромышленному оборудованию, в частности к укладчикам штучных продуктов в тару, устанавливаемых в роботизированных линиях фасования, укладки и упаковки различных продуктов в тару (коробки, контейнеры). Устройство для послойной укладки продуктов в тару содержит транспортеры подачи продукта, его отвода в упаковочную машину, механизм укладки продуктов в тару, снабженный вакуумным схватом с присосками и систему автоматического управления. Механизм укладки содержит два серводвигателя, приводящих последовательно соединенные синусные механизмы, к выходным звеньям которых смонтирован четырехзвенный шарнирный механизм, оснащенный вакуумным схватом, перемещающимся без динамических ударов. Изобретение позволяет повысить производительность, исключить подъемник тары и воспроизводить траекторию схвата при многослойной укладке продукта в тару близкую к вертикали, что значительно повышает надежность его работы. 2 з.п. ф-лы, 2 ил.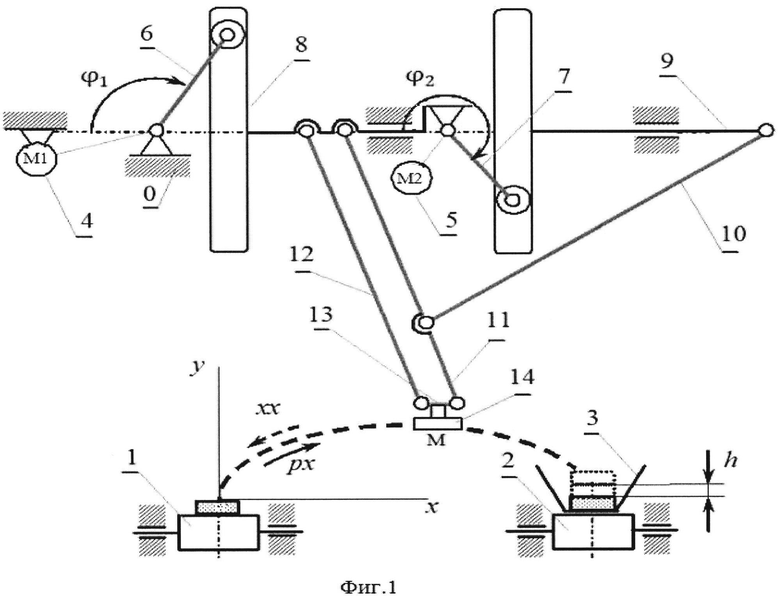
1. Устройство для послойной укладки продуктов в тару, включающее транспортеры подачи продукта, его отвода в упаковочную машину, механизм укладки продуктов в тару, снабженный вакуумным схватом с присосками и систему автоматического управления, отличающееся тем, что механизм укладки содержит два серводвигателя, приводящих последовательно соединенные синусные механизмы, к выходным звеньям которых смонтирован четырехзвенный шарнирный механизм, оснащенный вакуумным схватом, перемещающимся без динамических ударов.
2. Устройство по п. 1, отличающееся тем, что второй серводвигатель установлен на выходном звене первого синусного механизма.
3. Устройство по п. 1 или 2, отличающееся тем, что четырехзвенный шарнирный механизм выполнен в виде параллелограмма со стабильным горизонтальным положением плоскости удержания продукта над подающим и отводящим транспортерами.
| Электроакустический преобразователь типа ионофона | 1962 |
|
SU151896A1 |
| Электроимпульсное устройство для автоматического адресования лесоматериалов на сортировочных транспортерах | 1961 |
|
SU146693A1 |
| УСТРОЙСТВО ДЛЯ ПОСЛОЙНОЙ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В ТАРУ | 2008 |
|
RU2375271C1 |
| US 5743071 A1, 28.04.1998 | |||
| US 8910776 B2, 16.12.2014. | |||

