Изобретение относится к индикаторным устройствам радиолокационных станций (РЛС), а именно к способам отображения радиолокационной информации от воздушных, надводных и наземных объектов.
Известен способ отображения информации РЛС на одном плоском экране по трем координатам азимут - угол места - дальность, который заключается в том, что на индикаторе азимут - угол места для приблизительного указания дальности (третьей координаты) высвечивают отметку в виде так называемых крыльев, когда к обычной отметке в виде точки добавляются слева и справа горизонтальные черточки. (Радиолокационные устройства (теория и принципы построения). / Под ред. В.В. Григорина-Рябова. М.: Советское радио, 1970, стр. 283-286).
Недостатком этого способа является низкая точность съема информации, отсутствие у оператора ощущения реального изображения обозреваемого РЛС пространства и, как следствие, большая вероятность появления ошибок при считывании информации с индикатора и невозможность отображения и оценки скорости, а также направления перемещения объекта в пространстве.
Известны способы отображения радиолокационной информации от воздушных объектов в трехмерной системе координат на одном плоском экране азимут - дальность в виде яркостных отметок, изменяющихся по цвету в зависимости от углового положения или высоты полета воздушного объекта относительно РЛС (RU 2237260, кл. G01S 7/04 2004; JP 60200182, кл. G01S 7/12, 1985). Изменение цвета объектов на экране в этом способе обеспечивает разделение отображений близко расположенных объектов или перекрывающих друг друга участков береговой черты в виде удаляющегося каскада частично перекрывающих друг друга подобных разноцветных изображений.
Недостатком этих способов отображения является неоднозначность отображения углового положения воздушных объектов из-за различия цветоощущения разными операторами РЛС и, как следствие, появление ошибок. Кроме этого в этих устройствах отсутствует возможность визуальной оценки скорости и направления перемещения объекта в пространстве.
Известен способ отображения радиолокационной информации от воздушных объектов в трехмерной системе координат РЛС в виде яркостных отметок на раздельных индикаторах азимут - дальность и дальность - высота (угол места), размещенных на одной панели, и отображение азимутальных и дальностных шкал в виде пересекающихся линий на одном плоском экране, а дальностных и высотных линий на другом плоском экране (Справочник по основам радиолокационной техники / Под ред. В.В. Дружинина. М.: Военное издательство, 1967, стр. 406-416). Описанный в вышеуказанном справочнике способ практически реализован в радиовысотомерах ПРВ-11 и ПРВ-13 и заключается в том, что на одной панели размещают два раздельных плоских экрана азимут-дальность и дальность-высота (угол места), соединенных по входам с выходами информационных каналов РЛС (угломестных, высотных и дальномерных). На индикаторе азимут - дальность высвечивается масштабная сетка в виде азимутальных и дальностных линий, а на индикаторе дальность - высота высвечивается масштабная сетка в виде дальностных и высотных линий.
Недостатком известного способа является невозможность отображения на одном экране трех координат объекта (азимут - высота (угол места) - дальность), скорости и направления перемещения объекта в пространстве. Это, в свою очередь, приводит к необходимости использования нескольких операторов, так как при высоком темпе выдачи данных, из-за отсутствия естественности пространственного восприятия информации на разных индикаторах один оператор не способен выдавать точную информацию в большом объеме и с высокой скоростью. Кроме этого информация о скорости перемещения объекта и направление перемещения в пространстве на этих индикаторах отсутствует, и реализовать их невозможно.
Наиболее близким по содержанию является способ отображения радиолокационной информации, описанный в патенте RU 2549350 С1, кл. G01S 7/04 (2006, 01). Описанный в этом патенте способ отображения радиолокационной информации позволяет одновременно видеть на экране дальность, азимут, высоту, направление перемещения и скорость объекта, но без учета кривизны земли. Сам объект изображается в виде точки и нет возможности визуальной относительной оценки характеристик объекта: его класса и размера. Кроме этого отсутствует возможность оперативного перевода изометрического изображения в изображение в декартовых координатах, а также возможность поворота по желанию оператора плоскости, отображающей поверхность земли, вокруг оси, проходящей через точку стояния РЛС и перпендикулярной в этой точке к плоскости поверхности земли, что не позволяет в определенных тактических ситуациях при ухудшении точностных характеристик одних параметров улучшить другие.
Целью изобретения является повышение достоверности и информативности радиолокационной информации о параметрах воздушных, надводных и наземных объектов.
Технический результат достигается тем, что в предлагаемом способе отображения радиолокационной информации, включающем прием радиолокационной станцией отраженных от объектов радиосигналов, относительно местоположения РЛС, преобразование принятых от объектов сигналов в цифровую форму, отображение преобразованных сигналов на плоском экране в виде световых меток на плоскости z0y, а азимутальных и дальностных шкал в виде пересекающихся линий также на плоскости z0y (фиг. 1), а для отображения информации о высоте, направлении перемещения и скорости объекта в пространстве плоскость экрана, изображенного на плоскости z0y, виртуально наклоняют в плоскостях z0x и y0x (фиг. 2), при этом метку от объекта переносят параллельно оси 0z и высвечивают выше наклоненной плоскости экрана на величину измеренной РЛС высоты нахождения объекта и превращают в виртуальную метку, к этой виртуальной метке объекта добавляют черточку параллельно оси 0z, со шкалой высоты на черточке, в направлении наклоненной плоскости экрана, при этом черточку высоты одним концом упирают в виртуальную метку от объекта, а вторым концом упирают в точку реальных значений азимута и дальности объекта на наклоненном экране, на котором высвечивается точка со значениями азимута и дальности объекта относительно точки стояния РЛС, а наклоненная плоскость экрана отображает или плоскость горизонта земли, или плоскость поверхности земли относительно точки стояния РЛС (в зависимости от режима работы РЛС), при этом длина черточки высоты, со шкалой высоты, характеризует высоту объекта над горизонтом или над уровнем земли (в зависимости от режима работы РЛС), а скорость и направление перемещения объекта в пространстве отображается черточкой-вектором скорости, начало которого упирается в высвечиваемую виртуальную метку объекта, а направление черточки-вектора скорости соответствует направлению перемещения объекта в пространстве относительно точки стояния РЛС, и кроме этого на черточку-вектор скорости наносят шкалу скорости, которая характеризует величину скорости перемещения объекта в пространстве, а плоскость, характеризующую поверхность земли, отображают в виде части сферической поверхности, радиус которой пропорционален радиусу земли в точке стояния РЛС. Периметр сферической поверхности ограничивают дальностью обнаружения РЛС, в то же время радиус сферической поверхности оперативно изменяют по желанию оператора от пропорционального радиуса земли до бесконечности, превращая тем самым кривизну линии Земли в прямую линию, то есть в линию горизонта, а наклон плоскостей z0y и y0x изменяют от 0 до 90 градусов, превращая изометрическое изображение обозреваемого РЛС пространства в декартово изображение, а псевдообъемное четырехмерное изображение - в трехмерное плоскостное изображение, то есть в трехмерный индикатор азимут - дальность - скорость или в трехмерный индикатор дальность - высота - скорость, а плоскость, характеризующую поверхность земли, поворачивают по желанию оператора вокруг оси, проходящей через точку стояния РЛС и перпендикулярной в этой точке к плоскости поверхности земли, а рядом с точкой, изображающей объект, отображают по желанию оператора модели-портреты объектов, взятые из банка данных РЛС, конфигурация которых пропорциональна конфигурации и размерам обнаруженных объектов.
Сравнение предлагаемого способа с известными способами показывает, что он обладает новой совокупностью существенных признаков, которые позволяют успешно реализовать поставленную цель.
Сущность предлагаемого технического решения становится еще более понятной из приложенного к нему графического материала.
На фиг. 1 схематически представлен двухмерный индикатор азимут - дальность кругового обзора РЛС.
На фиг. 2 схематически представлено преобразование двухмерного индикатора азимут - дальность в четырехмерный индикатор РЛС азимут - дальность - высота - скорость за счет наклона, например, плоскости z0y на 45 градусов в плоскости z0x (как частный случай при наклоне от 0 до 90 градусов).
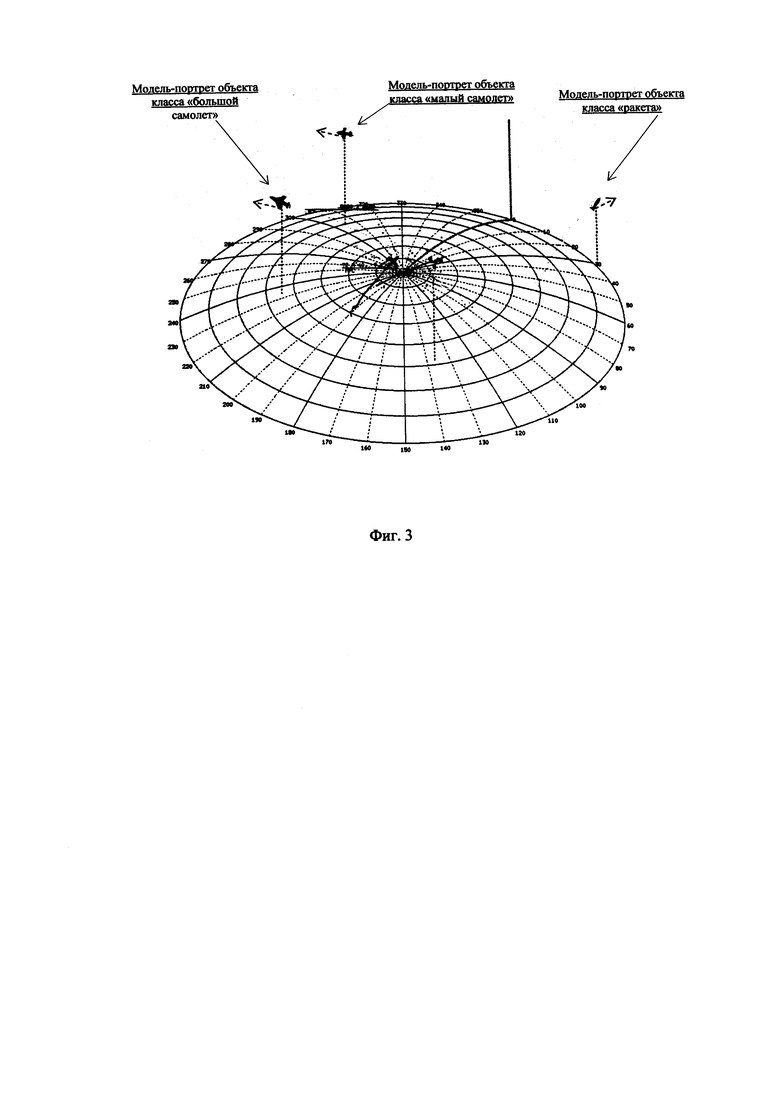
На фиг. 3 схематически представлены, как примеры, изображения моделей-портретов объектов классов «большой самолет», «малый самолет» и «ракета», размеры которых пропорциональны реальным объектам и которые имеются в банке данных портретов объектов РЛС.
На фиг. 4 схематически представлена эволюция преобразования четырехмерного индикатора азимут - дальность - высота - скорость в двухмерный индикатор дальность - высота.
Для более лучшего понимания преобразования одного вида индикатора в другие виды к заявке приложен видеофильм (на CD диске).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2549350C1 |
| СПОСОБ ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2340915C2 |
| Способ контроля и корректировки угла глиссады воздушного судна относительно точки приземления | 1991 |
|
SU1804628A3 |
| РАДИОТЕХНИЧЕСКИЙ СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ, ИЗМЕРЕНИЯ СКОРОСТИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1993 |
|
RU2126979C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕЛИ МОБИЛЬНОЙ РЛС | 2008 |
|
RU2410711C2 |
| ТРЕХМЕРНЫЙ ИНДИКАТОР РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1998 |
|
RU2140091C1 |
| УСТРОЙСТВО ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ | 2006 |
|
RU2333508C1 |
| СПОСОБ АВТОНОМНОЙ ВЫРАБОТКИ ИНФОРМАЦИИ ДЛЯ ПРОВОДКИ СУДОВ В УЗКИХ ФАРВАТЕРАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2097784C1 |
| СПОСОБ ПОВЫШЕНИЯ ДОСТОВЕРНОСТИ РАСПОЗНАВАНИЯ ЦЕЛИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2231082C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ПОВЕРХНОСТИ | 2005 |
|
RU2290663C1 |



Изобретение относится к способам отображения радиолокационной информации на экранах индикаторов радиолокационных станций (РЛС). Достигаемый техническим результат - повышение достоверности и информативности радиолокационной информации о параметрах воздушных, надводных и наземных объектов. Указанный результат достигается за счет приема радиолокационной станцией (РЛС) отраженных от объектов радиосигналов, преобразования принятых от объектов сигналов в цифровую форму, отображения преобразованных сигналов на плоском экране в виде световых меток на плоскости z0y, а азимутальных и дальностных шкал в виде пересекающихся линий также на плоскости z0y, при этом плоскость экрана z0y виртуально наклоняют в плоскостях z0x и y0x, метку от объекта переносят параллельно оси 0z и высвечивают выше наклоненной плоскости экрана на величину высоты объекта и превращают в виртуальную метку, к этой виртуальной метке добавляют черточку параллельно оси 0z, со шкалой высоты на черточке, в направлении наклоненной плоскости экрана, черточку высоты одним концом упирают в виртуальную метку от объекта, а вторым концом упирают в точку реальных значений азимута и дальности объекта на наклоненном экране, на котором высвечивается точка со значениями азимута и дальности объекта относительно точки стояния РЛС, а наклоненная плоскость экрана отображает или плоскость горизонта земли или плоскость поверхности земли относительно точки стояния РЛС (в зависимости от режима работы РЛС), при этом длина черточки высоты, со шкалой высоты, характеризует высоту объекта над горизонтом или над уровнем земли (в зависимости от режима работы РЛС). Скорость и направление перемещения объекта в пространстве отображаются черточкой-вектором скорости, начало которого упирается в высвечиваемую виртуальную метку объекта, а направление черточки-вектора скорости характеризует направление перемещения объекта в пространстве относительно точки стояния РЛС, и кроме этого на черточку-вектор скорости наносят шкалу скорости, которая характеризует величину скорости перемещения объекта в пространстве, а плоскость, характеризующую поверхность земли, отображают в виде части сферической поверхности, радиус которой пропорционален радиусу земли в точке стояния РЛС, а периметр сферической поверхности ограничивают дальностью обнаружения РЛС, в то же время, радиус сферической поверхности оперативно изменяют по желанию оператора, от пропорционального радиуса земли до бесконечности, превращая тем самым кривизну линии земли в прямую линию, то есть в линию горизонта, а наклон плоскостей z0y и y0x изменяют от 0 до 90 градусов, превращая изометрическое изображение обозреваемого РЛС пространства в декартово изображение, а псевдообъемное четырехмерное изображение - в трехмерное плоскостное изображение, то есть в трехмерный индикатор азимут - дальность - скорость или в трехмерный индикатор дальность - высота - скорость, а плоскость, характеризующую поверхность земли, поворачивают по желанию оператора вокруг оси, проходящей через точку стояния РЛС и перпендикулярной в этой точке к плоскости поверхности земли. Рядом с точкой, отображающей объект, отображают по желанию оператора модели-портреты объектов, взятые из банка данных РЛС, конфигурация которых пропорциональна конфигурации и размеру обнаруженных объектов. 4 ил.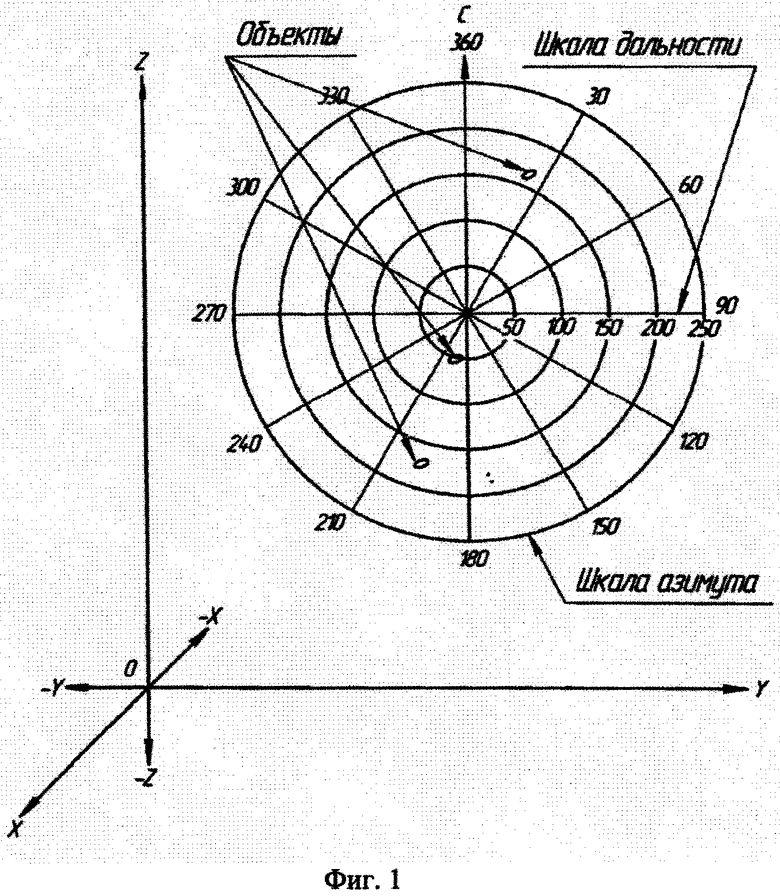
Способ отображения радиолокационной информации, включающий прием радиолокационной станцией отраженных от объектов радиосигналов, относительно местоположения РЛС, преобразование принятых от объектов сигналов в цифровую форму, отображение преобразованных сигналов на плоском экране в виде световых меток на плоскости z0y, а азимутальных и дальностных шкал в виде пересекающихся линий также на плоскости z0y, для отображения информации о высоте, направлении перемещения и скорости объекта в пространстве плоскость экрана, изображенного на плоскости z0y, виртуально наклоняют в плоскостях z0x и y0x, при этом метку от объекта переносят параллельно оси 0z и высвечивают выше наклоненной плоскости экрана на величину измеренной РЛС высоты нахождения объекта и превращают в виртуальную метку, и к этой виртуальной метке объекта добавляют черточку параллельно оси 0z, со шкалой высоты на черточке, в направлении наклоненной плоскости экрана, при этом черточку высоты одним концом упирают в виртуальную метку от объекта, а вторым концом упирают в точку реальных значений азимута и дальности объекта на наклоненном экране, на котором высвечивается точка со значениями азимута и дальности объекта относительно точки стояния РЛС, а наклоненная плоскость экрана отображает или плоскость горизонта земли или плоскость поверхности земли относительно точки стояния РЛС (в зависимости от режима работы РЛС), при этом длина черточки высоты, со шкалой высоты, характеризует высоту объекта над горизонтом или над уровнем земли (в зависимости от режима работы РЛС), а скорость и направление перемещения объекта в пространстве отображается черточкой-вектором скорости, начало которого упирается в высвечиваемую виртуальную метку объекта, а направление черточки-вектора скорости характеризует направление перемещения объекта в пространстве относительно точки стояния РЛС, и кроме этого на черточку-вектор скорости наносят шкалу скорости, которая характеризует величину скорости перемещения объекта в пространстве, отличающийся тем, что плоскость, характеризующую поверхность земли, отображают в виде части сферической поверхности, радиус которой пропорционален радиусу земли в точке стояния РЛС, а периметр сферической поверхности ограничивают дальностью обнаружения РЛС, в то же время радиус сферической поверхности оперативно изменяют по желанию наблюдателя от пропорционального радиуса Земли до бесконечности, превращая тем самым кривизну линии земли в прямую линию, то есть в линию горизонта, а наклон плоскостей z0y и y0x изменяют от 0 до 90 градусов, превращая изометрическое изображение обозреваемого РЛС пространства в декартово изображение, а псевдообъемное четырехмерное изображение - в трехмерное плоскостное изображение, то есть в трехмерный индикатор азимут - дальность - скорость или в трехмерный индикатор дальность - высота - скорость, а плоскость, характеризующую поверхность земли, поворачивают по желанию оператора вокруг оси, проходящей через точку стояния РЛС и перпендикулярной в этой точке к плоскости поверхности земли, а рядом с точкой, отображающей объект, отображают по желанию оператора модели-портреты объектов, взятые из банка данных РЛС, конфигурация которых пропорциональна конфигурации и размеру обнаруженных объектов.
| СПОСОБ ОТОБРАЖЕНИЯ РАДИОЛОКАЦИОННОЙ ИНФОРМАЦИИ | 2013 |
|
RU2549350C1 |
| СИСТЕМА И СПОСОБ ТРЕХМЕРНОЙ ВИЗУАЛИЗАЦИИ ЯРКОСТНОЙ РАДИОЛОКАЦИОННОЙ КАРТЫ МЕСТНОСТИ | 2012 |
|
RU2513122C2 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2348981C1 |
| US 5896098 A, 20.04.1999 | |||
| Способ получения этилового эфира 9-фенилгидразоно-6-метил-4-оксо-6,7,8,9-тетрагидро-4н-пиридо/1,2-а/-пиримидин-3-карбоновой кислоты | 1980 |
|
SU978730A3 |
| US 4224621 A, 23.09.1980 | |||
| US 6212132 B1, 03.04.2001. | |||

