ПРЕДПОСЫЛКИ
Углеводороды, такие как нефть и газ, обычно получают из подземных пластов. Разработка подземного месторождения и процессы, связанные с извлечением углеводородов из подземного пласта, представляют собой сложное целое. Обычно работы по разработке подземного месторождения включают в себя некоторое количество этапов, таких как, например, бурение ствола скважины на заданном месте расположения скважины, обработку ствола скважины для оптимизации добычи углеводородов и выполнение необходимых этапов добычи углеводородов из подземного пласта и последующей обработки.
Для современных работ по разработке нефтяного месторождения требуется большое количество информации, относящейся к параметрам и условиям, встречающимся в забое скважины. Такая информация может включать в себя характеристики подземных пластов, пересекаемых буровой скважиной, и данные, относящиеся к размеру и конфигурации самой буровой скважины. Сбор информации, относящейся к условиям в забое скважине, который обычно называют «каротажем», можно выполнять несколькими способами, включая каротаж прибором, спускаемым на кабеле, измерения в процессе бурения (ИПБ), каротаж во время бурения (КВБ), каротаж прибором, спускаемым на бурильной трубе и каротаж прибором, спускаемым на гибкой трубе. Имеются различные каротажные приборы, предназначенные для использования с каждым из этих способов. Эти каротажные приборы можно использовать для построения скважинного изображения. Построение скважинного изображения является важным аспектом бурения и геоуправления при выполнении подземных работ.
Изменения свойств пласта вокруг ствола скважины можно использовать для получения относящейся к текущим работам информации, такой как угол падения и направление пласта, через который пробуривают ствол скважины. Например, в качестве способа контроля качества можно получать углы падения из скважинных изображений плотности и сравнивать с реальными данными геоуправления. Кроме того, инженеры по бурению могут прогнозировать, как могут выглядеть скважинные изображения до бурения ствола скважины, и могут использовать эту информацию, чтобы помогать группе бурения оценивать применимость различных приборов построения изображения для конкретной скважины и конкретного условия осадконакопления.
Следовательно, желательно разработать надежные способы и системы для выполнения прямого моделирования скважинного изображения в случае неоднородных свойств пласта, который пересекается стволом скважины. В типичных способах прямого моделирования имитируют отклики каротажных приборов на свойства пласта. Вследствие этого результаты моделирования сильно зависят от конструкции конкретного каротажного прибора и связанной с ним теорией физических процессов. Желательно получать результаты моделирования, которые не зависят от конкретного каротажного прибора.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
фигура 1 - вид приведенного для примера ствола скважины, пересекающего пласт;
фигура 2А - вид спереди в разрезе реального каротажного прибора, расположенного в стволе скважины;
фигура 2В - вид спереди воображаемого круга из фигуры 1;
фигуры 3А и 3В - иллюстрации процедуры определения изображения прямого моделировании в соответствии с вариантом осуществления настоящего раскрытия;
фигура 4 - иллюстрация скважинного изображения, на котором результаты прямого моделирования визуализированы с помощью каротажной диаграммы переменной плотности (КДПП), при этом темные области обозначают высокие значения;
фигура 5 - иллюстрация примера процедуры получения псевдокаротажной диаграммы согласно варианту осуществления настоящего раскрытия;
фигура 6 - блок-схема этапов выполнения прямого моделирования согласно варианту осуществления настоящего раскрытия; и
фигура 7 - иллюстрация примера прямого моделирования гамма-излучения и плотности в горизонтальном разрезе согласно варианту осуществления настоящего раскрытия.
Хотя варианты осуществления этого раскрытия показаны, и описаны, и определены с обращением к примерам вариантов осуществления раскрытия, такое обращение не накладывает ограничения на раскрытие и такое ограничение не должно предполагаться. Как должно быть понятно специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, в раскрытом объекте изобретения допускаются значительные модификации, изменения и эквиваленты по форме и функции. Показанные и описанные варианты осуществления этого раскрытия являются только примерами и ими не исчерпывается объем раскрытия.
ПОДРОБНОЕ ОПИСАНИЕ
Для целей этого раскрытия система обработки информации может включать в себя любое техническое средство или совокупность технических средств, способных вычислять, классифицировать, обрабатывать, передавать, принимать, извлекать, порождать, переключать, сохранять, отображать, показывать, обнаруживать, регистрировать, воспроизводить, управлять или использовать информацию, сведения или данные в любой форме для бизнеса, науки, управления или других целей. Например, система обработки информации может быть персональным компьютером, сетевой системой хранения данных или любым другим подходящим устройством и может отличаться от аналогичных других размером, формой, характеристиками, функциональными возможностями и стоимостью. Система обработки информации может включать в себя оперативное запоминающее устройство (ОЗУ), один или несколько ресурсов для обработки информации, таких как центральный процессор (ЦП) или управляющую логику аппаратного обеспечения или программного обеспечения, постоянное запоминающее устройство и/или энергонезависимое запоминающее устройство других видов. Дополнительные компоненты системы обработки информации могут включать в себя один несколько дисковых накопителей, один или несколько сетевых портов для связи с внешними устройствами, а также различные устройства ввода-вывода, такие как клавиатура, мышь и видеодисплей. Кроме того, система обработки информации может включать в себя одну или несколько шин, способных осуществлять обмен информацией между различными компонентами аппаратного обеспечения.
Для целей этого раскрытия считываемый компьютером носитель может включать в себя любое техническое средство или совокупность технических средств, которые могут сохранять данные и/или команды в течение периода времени. Считываемый компьютером носитель может включать в себя, например, но без ограничения им, носители данных, такие как устройство хранения данных с прямым доступом (например, жесткий диск или дискета), устройство хранения данных с последовательным доступом, компакт-диск, компакт-диск, доступный только для чтения, цифровой универсальный диск, оперативное запоминающее устройство, постоянное запоминающее устройство, электрические стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) и/или флэш-память; а также коммуникационные среды, такие как провода, оптические волокна, микроволны, радиоволны и другие электромагнитные и/или оптические носители, и/или любое сочетание из упомянутых выше.
Термин «вверх по стволу скважины», используемый в этой заявке, означает вдоль бурильной колонны или ствола буровой скважины от дистального конца к поверхности, а термин «вниз по стволу скважины», используемый в этой заявке, означает вдоль бурильной колонны или ствола буровой скважины от поверхности к дистальному концу. Термин «простирание», используемый в этой заявке, относится к направлению линии, образованной пересечением поверхности наклонного пласта с горизонтальной плоскостью. Термин «относительный угол падения», используемый в этой заявке, означает угол между линией, нормальной к плоскости напластования («полюсу»), и осью ствола скважины, измеренным в общей плоскости. Термин «падение», используемый в этой заявке, обозначает угол наклона наклонного пласта, измеренный перпендикулярно к простиранию и в вертикальной плоскости, привязанный к горизонтальной плоскости. Термин «азимут падения», используемый в этой заявке, обозначает направление падения, измеренное перпендикулярно к простиранию и привязанное к северу. Термин «азимут», используемый в этой заявке, обозначает угол направления ствола скважины, спроецированный на горизонтальную плоскость и взятый относительно северного полюса, при этом азимут 0° совпадает с севером, азимут 90° совпадает с востоком, азимут 180° совпадает с югом и азимут 270° совпадает с западом. Термин «наклон», используемый в этой заявке, обозначает степень отклонения ствола скважины от вертикали или, если не оговорено иное, угол между направлением силы тяжести и направлением ствола скважины.
В этой заявке подробно описываются иллюстративные варианты осуществления настоящего изобретения. Ради ясности не все признаки фактической реализации могут быть рассмотрены в этом описании. Конечно, должно быть понятно, что при разработке любого такого реального варианта осуществления многочисленные, специфические для реализации решения могут быть сделаны для достижения конкретных целей реализации, которые могут изменяться от одной реализации к другой. Кроме того, должно быть понятно, что такая разработка может быть сложной и требующей много времени, но тем не менее должна быть обычной задачей для специалистов в соответствующей области техники, имеющих выгоду от настоящего раскрытия.
Для содействия лучшему пониманию настоящего изобретения ниже приведены примеры нескольких вариантов осуществления. Не следует считать нижеследующие примеры ограничивающими или задающими объем изобретения. Варианты осуществления настоящего раскрытия можно применять к горизонтальным, вертикальным, отклоненным или иным нелинейным стволам скважин в подземном пласте любого типа. Варианты осуществления можно применять к нагнетательным скважинам, а также к продуктивным скважинам, в том числе к углеводородным скважинам. Варианты осуществления могут быть реализованы при использовании прибора, который пригоден для испытания пласта, извлечения керна и отбора проб на всем протяжении разрезов пласта. Варианты осуществления могут быть реализованы при использовании приборов, которые, например, можно транспортировать через проходное сечение трубчатой обсадной колонны, используя каротажный кабель, тросовый канат, гибкую трубу, скважинный робот или что-либо подобное. Термин «измерения в процессе бурения» («ИПБ») обычно относится к измерению условий в забое скважины, связанных с перемещением и местоположением буровой компоновки, при продолжении бурения. Термин «каротаж во время бурения» («КВБ») обычно используется применительно к аналогичным способам, которые дополнительно сосредоточены на измерении параметров пласта. Устройства и способы согласно некоторым вариантам осуществления можно использовать при выполнении одной или нескольких операций каротажа с прибором на кабеле, измерений в процессе бурения и каротажа во время бурения.
Настоящая заявка относится к повышению качества подземных работ и более конкретно к способу и системе для улучшения прямого моделирования скважинного изображения свойств пласта.
В соответствии с вариантом осуществления настоящего раскрытия данные соседней скважины, имеющиеся в интерпретированной структурной модели, можно использовать для формирования получаемых прямым моделированием скважинных изображений целевого ствола скважины. Как рассмотрено более подробно ниже, способы и системы, раскрытые в этой заявке, можно применять к функциям прямого моделирования гамма-излучения и плотности при выполнении геоуправления. Кроме того, непрерывно моделируемые скважинные изображения гамма-излучения и плотности вдоль траектории целевой скважины можно наблюдать, чтобы лучше понимать и сравнивать реальные и моделированные геологические свойства представляющего интерес пласта.
В соответствии с вариантом осуществления настоящего раскрытия предложена методология вычислений, которая включает в себя трехмерное пространственное вычисление и вычисление значений псевдокаротажной диаграммы. Термин «псевдокаротажная диаграмма», используемый в этой заявке, обозначает каротажные данные, получаемые с использованием способов прямого моделирования, раскрытых в этой заявке, которые отражают представляющий интерес конкретный параметр.
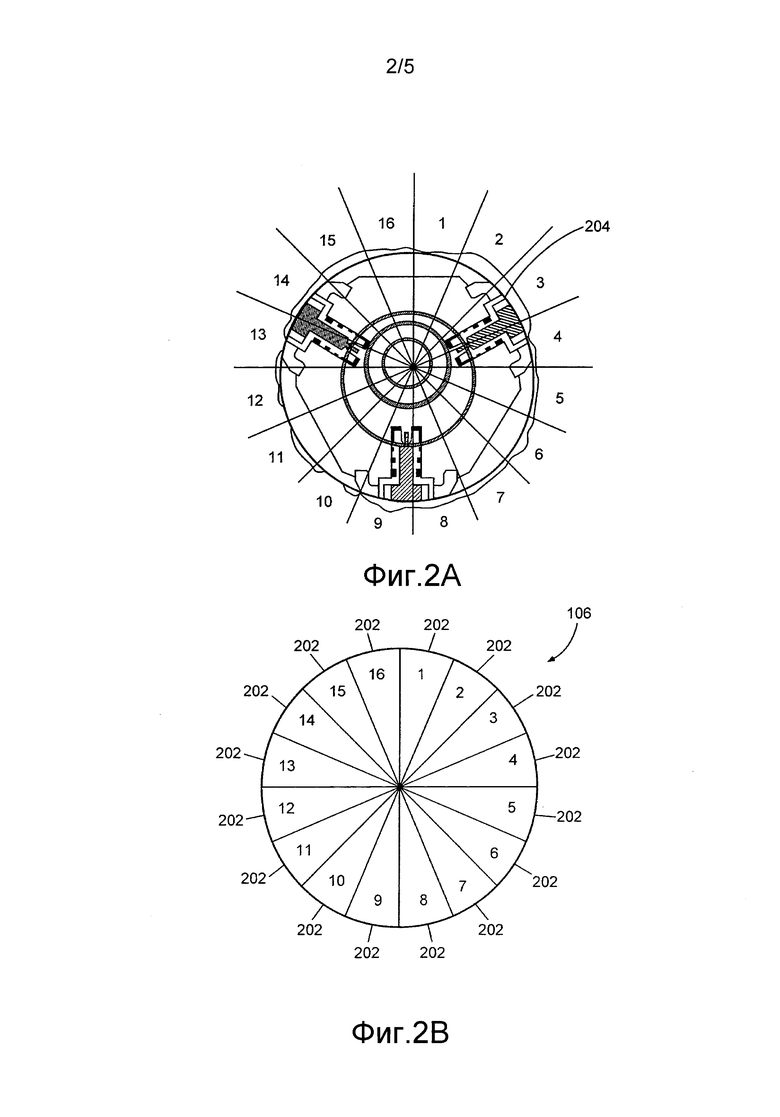
Теперь обратимся к фигуре 1, на которой показан ствол 102 скважины, который пересекает пласт 104. Без отступления от объема настоящего раскрытия ствол 102 скважины может иметь любую ориентацию, такую, какую имеет, например, вертикальный ствол скважины, горизонтальный ствол скважины и т.д. В таком случае на траектории ствола 102 скважины может быть центрирован воображаемый круг 106 с радиусом 108, соответствующим области исследования (ОИ), и находящийся в плоскости, которая перпендикулярна к оси ствола 102 скважины. Область исследования равна радиусу 112 буровой скважины с добавлением глубины 114 исследования (ГИ), которая, как показано на фигуре 1, продолжается в пласт. Воображаемый круг 106 может представлять область пласта, которая анализируется в каротажном приборе, таком как прибор измерений в процессе бурения или каротажа во время бурения. На фигуре 2А показан вид спереди разреза реального каротажного прибора, расположенного в стволе скважины. Наиболее удаленная от середины окружность 204 обозначает внешнюю поверхность прибора. В процессе работы, когда каротажный прибор перемещают мимо точки в стволе скважины, можно измерять данные окружающей породы и пласта в некотором количестве элементов дискретизации. Получаемые данные могут охватывать все азимуты вокруг ствола скважины. В каротажном приборе эти получаемые данные могут использоваться для формирования скважинного изображения. Прямое моделирование включает в себя прогнозирование скважинного изображения до получения реальных измерений. Соответственно, для получения результатов прямого моделирования элементы (202) дискретизации можно имитировать.
На фигуре 2В показаны упрощенное представление разреза каротажного прибора и принцип измерения. На фигуре 2В показан вид спереди круга 106 из фигуры 1. Воображаемый круг 106 можно разделить на некоторое количество элементов 202 дискретизации, которые разделяют воображаемый круг 106 на по существу равные секторы. Как рассмотрено более подробно ниже, трехмерные (3М) пространственные координаты элементов 202 дискретизации можно вычислить в соответствии с настоящим раскрытием и алгоритм псевдокаротажной диаграммы можно применить для вычисления в каждом положении элемента дискретизации псевдозначений представляющего интерес параметра. В частности, каротажным прибором можно измерять значения свойств пласта в положениях всех элементов 202 дискретизации воображаемого круга 106, центром которого является ось 110 ствола скважины и который имеет радиус, равный области исследования. Как показано на фигуре 2В, элементы 202 дискретизации разделяют воображаемый круг 106 на некоторое количество секторов. Хотя в примере варианта осуществления из фигур 2А и 2В показаны 16 элементов дискретизации, настоящее раскрытие не ограничено никаким конкретным количеством элементов дискретизации. Например, в других вариантах осуществления может быть 32, 48 или любое другое подходящее количество элементов дискретизации. Элемент 1 дискретизации предполагается находящимся под углом 0° в верхней части воображаемого круга 106. В таком случае угол, показывающий положение каждого следующего элемента дискретизации (ЭД), можно определить как:
Угол ЭД = (Номер ЭД-1)*[360/(Количество ЭД)].
Соответственно, в примере варианта осуществления из фигур 2А и 2В угол для элемента 2 дискретизации составляет 22,5° и угол для элемента 3 дискретизации составляет 45°. Аналогичным образом можно получить угол, показывающий положение каждого следующего элемента дискретизации.
Соответственно, на первом этапе можно вычислить трехмерные пространственные координаты элементов 202 дискретизации. В каротажных приборах, таких как, например, приборы каротажа во время бурения, элементы дискретизации равных размеров, показанные на фигуре 2, могут использоваться для описания азимутального изменения измеряемого петрофизического свойства. В соответствии с одним примером варианта осуществления, показанного на фигуре 2, воображаемый круг 106 можно разделить на 16 элементов дискретизации равных размеров. Затем данные можно привязать к верхней стороне воображаемого круга 106 или к северному магнитному полюсу земли. В частности, в искривленном стволе скважины данные можно привязать к верхней стороне воображаемого круга 106, тогда как в вертикальном стволе скважины, данные можно привязать к северному магнитному полюсу земли. Как показано на фигуре 2, элементы 202 дискретизации можно промаркировать номерами 1-16 так, чтобы элемент 202 дискретизации под номером 1 располагался на верхней стороне воображаемого круга 106 или на стороне северного магнитного полюса ствола 102 скважины при сохранении магнитно-ориентированных данных в вертикальной скважине. В этом случае, в отличие от элемента 202 дискретизации (ЭД) под номером, соответствующим [(Номер ЭД/2)+1], элемент 202 дискретизации, обозначенный номером 9, находится на нижней стороне воображаемого круга или южной стороне ствола 102 скважины при сохранении магнитно-ориентированных данных в вертикальном стволе скважины.
Соответственно, с учетом положения траектории скважины, азимута и наклона траектории ствола 102 скважины, также глубины исследования и количества элементов дискретизации можно вычислить трехмерные координаты всех элементов 202 дискретизации в подземном пространстве. В частности, тригонометрические функции можно использовать для вычисления координат элементов дискретизации в соответствии с вариантом осуществления настоящего раскрытия. Например, в предположении, что координатами траектории скважины в подземной точке (Р) являются (EWp, NSp, TVDp) (EWp, NSp, TVDp) (где EW обозначает восток-запад, NS обозначает север-юг и TVD обозначает полную вертикальную глубину); протяженность глубины исследования равна R; азимут траектории скважины в этой точке обозначен azim; наклон траектории скважины в этой точке обозначен incl; bini (i=1, 2, …, N) обозначает i-ый элемент дискретизации; N обозначает количество элементов дискретизации и соответствующий угол bini равен anglei. В таком случае координаты bini, определяемые как (EWi, NSi, TVDi), можно вычислить при использовании нижеследующих уравнений:
EWi=EWp+EWoffset,
NSi=NSp+NSoffset,
TVDi=TVDp+TVDoffset.
В этих уравнениях
EWoffset=Hoffset∗sin(anglei),
NSoffset=Hoffse∗cos(anglei),
TVDoffset=R ∗cos(bini) ∗sin(incl)
И


При использовании методов интерполяции координаты траектории целевого ствола 102 скважины можно получить по данным геофизического исследования в скважине на основании измеренных значений азимута и данных о наклоне. Как должно быть понятно специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, некоторое количество методов можно использовать для получения координат целевого ствола 102 скважины с помощью измерений в процессе бурения. Такие методы могут включать в себя, но без ограничения ими, метод минимальной кривизны, метод радиуса кривизны и тангенциальный метод. Соответственно, можно получить набор координат точек в трех измерениях для одного положения на конкретной глубине целевого ствола 102 скважины. Количество точек в трех измерениях будет равно количеству элементов 202 дискретизации, и точки в трех измерениях можно распределить по краю воображаемого круга 106. В соответствии со способами и системами, раскрытыми в этой заявке, после получения набора координат точек в трех измерениях, рассмотренного выше, можно выполнить вычисление изображения прямого моделирования. Входными данными для вычисления изображения прямого моделирования являются значения элементов дискретизации из псевдокаротажной диаграмме на соответствующей измеряемой глубине. На фигуре 3 показана процедура определения изображения прямого моделирования в соответствии с вариантом осуществления настоящего раскрытия.
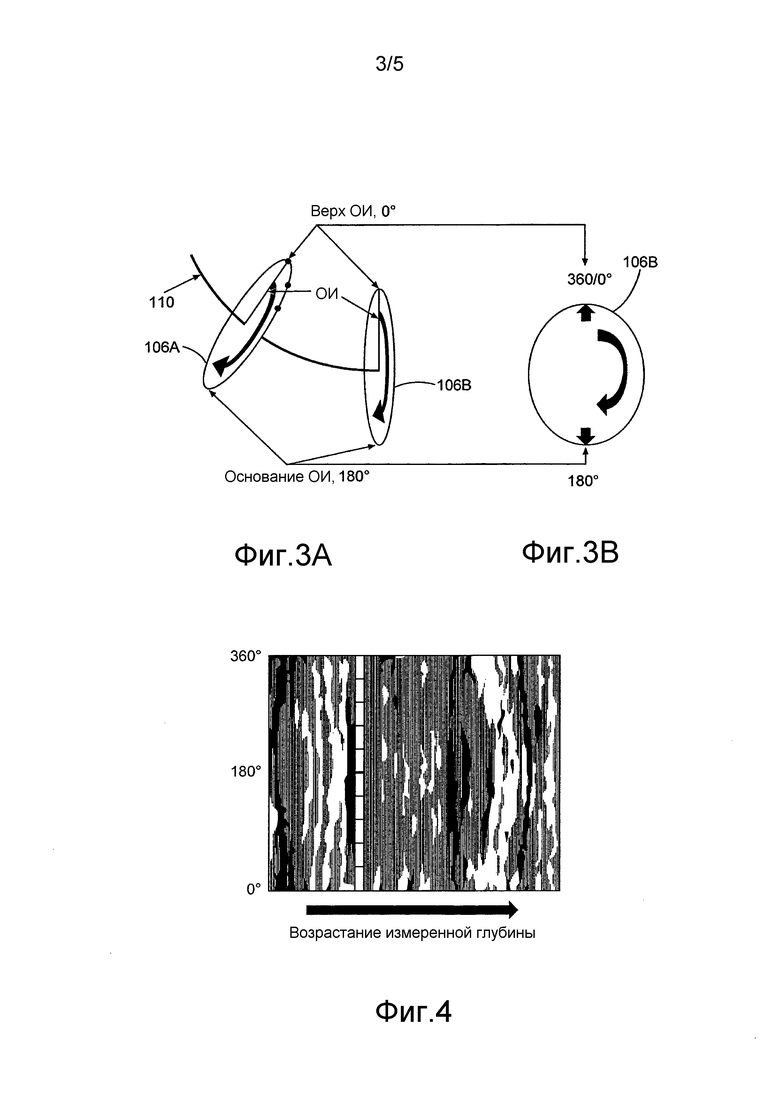
Кругами 106А и 106В показаны два примера положений воображаемого круга 106 вдоль оси 110 ствола скважины. Соответственно, одинаковое количество данных моделирования (в виде «псевдокаротажной диаграммы») можно получить в каждом круге 106А, 106В. В частности, воображаемый круг 106 может быть расположен на некотором количестве различных осевых мест вдоль ствола скважины, и псевдокаротажная диаграмма может быть получена повторно для каждого круга. Ориентацию воображаемого круга 106 можно изменять в зависимости от ориентации ствола скважины. В частности, когда ось 110 ствола скважины уходит вверх, вниз или стремится идти по другим направлениям, наклон и азимут воображаемого круга 106 на конкретном месте также следует изменять, чтобы воображаемый круг 106 оставался перпендикулярным к оси 110 ствола скважины. Соответственно, когда ось 110 ствола скважины ориентирована в вертикальном направлении, воображаемый круг 106 следует ориентировать в горизонтальной плоскости. В противоположность этому, когда ось 110 ствола скважины ориентирована в горизонтальном направлении, воображаемый круг 106 должен находиться в вертикальной плоскости. Наконец, когда ось 110 ствола скважины наклонена, воображаемый круг 106 также должен быть наклонным кругом. На фигуре 3А показан вид сбоку воображаемых кругов 106А и 106В. В отличие от этого на фигуре 3В показан воображаемый круг 106В, видимый при взгляде в ствол скважины по направлению к забою ствола 102 скважины или буровому долоту. Как показано на фигурах 3А и 3В, первый элемент дискретизации (элемент 1 дискретизации) предполагается находящимся на верхней части воображаемого круга 106 под углом 0. Далее угол элементов дискретизации возрастает в направлении по часовой стрелке по мере повышения номера элемента дискретизации.
На фигуре 4 показана визуализация результатов прямого моделирования на каротажной диаграмме переменной плотности (КДПП). Как должно быть понятно специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, каротажную диаграмму переменной плотности можно использовать, чтобы представлять набор данных путем замены номеров на видимое изображение для легкого наблюдения изменений значений данных. Например, на фигуре 4 темные цвета использованы для показа высоких значений, тогда светлые цвета обозначают низкие значения. В частности, ствол 102 скважины имеет круговую форму в трехмерном пространстве. Каротажную диаграмму переменной плотности можно использовать для точного представления свойства ствола 102 скважины в двумерном пространстве. На фигуре 4 по вертикальной оси показан угол элементов дискретизации в пределах 0°-360° и по горизонтальной оси представлена измеренная глубина траектории скважины. Соответственно, каротажную диаграмму переменной плотности из фигуры 4 можно использовать для показа представляющего интерес свойства на различных местах нахождения элементов дискретизации вдоль ствола 102 скважины способом, аналогичным рисованию масляной краской на колонне, обертыванием колонны белой бумагой для монотипии краски и затем разворачиванием белой бумаги и расплющиванием краски.
Псевдокаротажные диаграммы вычисляют в соответствии с каротажными данными из соседней скважины и положением их (диаграмм) в интерпретированной структурной модели. Для вычисления псевдокаротажной диаграммы в структурной модели должна находиться по меньшей мере одна поверхность и эта поверхность должна пересекать по меньшей мере одну соседнюю скважину. Поскольку земная поверхность и поверхность пласта не являются плоскими горизонтальными плоскостями, они часто имеют изменения рельефа. Следовательно, структурные модели можно использовать в качестве ограничений или привязок.
В одном варианте осуществления прежде всего получают реальные значения каротажных диаграмм из соседних скважин с надлежащими соответствующими координатами. Затем значение каротажной диаграммы из соседней скважины в заданной точке, а также координаты заданной точки выбирают в качестве входных данных. После этого методы пространственной интерполяции можно использовать для вычисления значения псевдокаротажной диаграммы в заданной точке на траектории целевого ствола скважины. Методы интерполяции включающие, но без ограничения ими, метод кригинга или метод обратных взвешенных расстояний (МОВР), можно использовать для выполнения вычисления. Реализация таких методов хорошо известна специалистам в соответствующей области техники и поэтому не будет подробно рассматриваться в этой заявке.
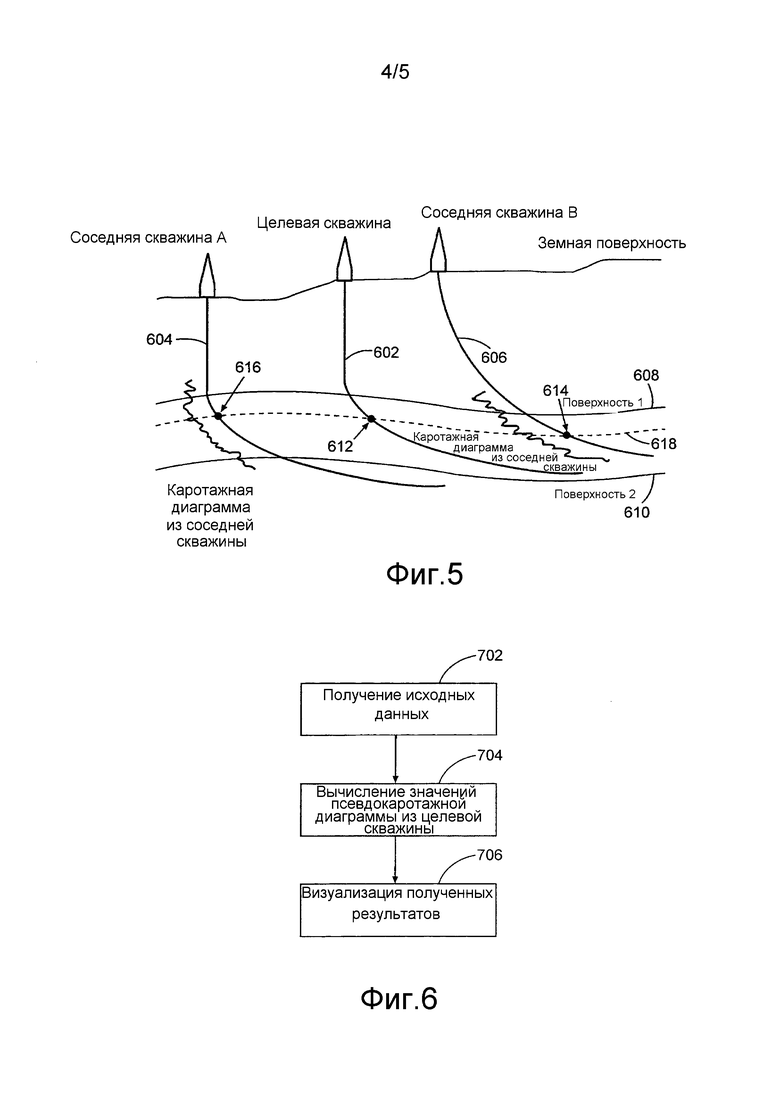
На фигуре 5 показана примерная процедура получения псевдокаротажной диаграммы в соответствии с вариантом осуществления настоящего раскрытия. В частности, на фигуре 5 показана целевая скважина 602 и две соседние скважины 604, 606. Известны координаты траекторий скважин и реальные каротажные данные из соседних скважин 604, 606. Кроме того, известна траектория скважины, по которой целевая скважина 602 должна проходить. Две поверхности 608, 610 представлены в структурной модели. Чтобы вычислить значение псевдокаротажной диаграммы в заданной точке 612 вдоль целевого ствола 602 скважины, поверхности 608, 610 можно использовать в качестве привязки для поиска надлежащих соответствующих координат 614, 616 соседних скважин (606, 608), показанных соединенными пунктирной линией 618. Надлежащие соответствующие координаты соседних скважин (606, 608) необязательно являются точками вдоль соседних скважин (606, 608), которые имеют одинаковое значение полной вертикальной глубины (ПВГ). Термин «полная вертикальная глубина», используемый в этой заявке, обозначает вертикальное расстояние от устья скважины до подземной точки. Вместе с тем надлежащие соответствующие координаты соседних скважин (606, 608) являются точками, которые в отличие от заданной точки 612 имеют сравнительно одинаковые положения относительно поверхностей (608, 610).
Значения псевдокаротажной диаграммы вдоль всей или части траектории 602 целевого ствола скважины могут быть определены с использованием способов, раскрытых в этой заявке. В частности, после завершения вычислений в первой заданной точке вдоль траектории 602 целевого ствола скважины процесс можно повторить для второй заданной точки вдоль траектории 602 целевого ствола скважины, чтобы вычислить значения псевдокаротажной диаграммы во второй заданной точке. Соответственно, процесс повторяют для различных заданных точек вдоль траектории 602 целевого ствола скважины до тех пор, пока не будут определены значения псевдокаротажной диаграммы для всех заданных точек вдоль траектории 602 целевого ствола скважины.
Аналогичный способ можно использовать для вычислении значений псевдокаротажной диаграммы для любой произвольной точки в подземном пространстве в области поверхностей 608, 610. В частности, один и тот же способ можно использовать для вычисления значений псевдокаротажных диаграмм для всех положений элементов дискретизации по окружности воображаемого круга 106, который перпендикулярен к траектории ствола скважины.
Значения псевдокаротажной диаграммы по существу представляют собой трехмерную модель вокруг траектории ствола 102 скважины. При вычислении изображения прямого моделирования производят поиск значений на расстоянии, равном области исследования, от места траектории скважины для элементов дискретизации от 1 до n, где n - общее количество элементов разрешения, для которых пользователь хочет выполнить вычисления. В примере варианта осуществления из фигуры 2 значение n может быть равно 16. Соответственно, моделированные значения свойства пласта вдоль ствола 102 скважины могут быть получены на пересечении с трехмерной моделью псевдокаротажной диаграммы. Изображение данных прямого моделирования может состоять из многих этих результатов вычислений вдоль длины ствола 102 скважины вместе с результатами повторных вычислений по координатам траектории скважины. В некоторых вариантах осуществления исследовательские измерения могут быть получены на определенных интервалах вдоль траектории ствола скважины. Например, в одном варианте осуществления исследовательские измерения могут быть получены через каждые 30 футов (9,144 м) вдоль траектории ствола скважины. Однако может быть желательным определение координат траектории скважины на более коротких интервалах, чем интервал исследовательских измерений. Например, может быть желательной известность координат траектории ствола скважины через каждый 1 фут (0,3048 м) вдоль траектории ствола скважины. Соответственно, интерполяцию можно использовать для вычисления координат с заданным размером шага (например, 1 фут (0,3048 м)) при использовании данных исследовательских измерений, получаемых через каждые 30 футов (9,144 м) вдоль траектории ствола скважины. Как должно быть понятно специалистам в соответствующей области техники, имеющим выгоду от этого раскрытия, для этой цели можно использовать некоторое количество методов математической интерполяции. Эти методы математической интерполяции включают в себя, но без ограничения ими, линейную интерполяцию, интерполяцию с помощью сплайн-функции и т.д.
На фигуре 6 показана блок-схема этапов выполнения прямого моделирования согласно варианту осуществления настоящего раскрытия. В некоторых вариантах осуществления этапы, раскрытые на фигуре 6, можно выполнять с использованием системы обработки информации совместно со считываемым компьютером носителем, предназначенным для сохранения информации по мере необходимости. Сначала на этапе 702 можно получить исходные данные. В одном варианте осуществления исходные данные могут загружаться на считываемый компьютер носитель, который является доступным для системы обработки информации. В одном варианте осуществления исходные данные могут включать в себя, но без ограничения ими, один или несколько наборов каротажных данных из соседних скважин, данные о координатах траекторий скважин (исследовательские данные) из соседних скважин, данные о координатах траектории целевой скважины (исследовательские данные) и данные структурной модели (по меньшей мере одна поверхность которой пересекается с целевой скважиной и с по меньшей мере одной соседней скважиной). Затем на этапе 704 могут быть вычислены значения псевдокаротажной диаграммы для целевой скважины. В некоторых вариантах осуществления значения псевдокаротажной диаграммы для целевой скважины могут вычисляться в системе обработки информации. Соответственно, на этапе 704 процесс начинают в первой заданной точке вдоль траектории целевого ствола скважины. Одно или несколько из азимута, наклона и координат целевой точки для первых заданных точек используют в сочетании с тригонометрическими функциями для вычисления в первой заданной точке координат элементов дискретизации воображаемого круга, перпендикулярного к траектории целевого ствола скважины. Для положения каждого элемента дискретизации соответствующие точки из соседних скважин получают и используют для получения каротажных данных из соседних скважин в первой заданной точке. После этого пространственную интерполяцию (например, методом кригинга или обратных взвешенных расстояний и т.д.) можно использовать для вычисления значений псевдокаротажной диаграммы в координате положения элемента дискретизации. Аналогичным образом значения псевдокаротажной диаграммы можно вычислить для положений всех элементов дискретизации в первой заданной точке. Затем результаты вычисления для первой заданной точки вдоль траектории целевого ствола скважины можно сохранить на считываемом компьютером носителе. После этого процесс повторяют для последующих точек вдоль траектории целевого ствола скважины до тех пор, пока не будут определены значения для всех точек вдоль траектории целевого ствола скважины.
Наконец, на этапе 706 результаты, полученные для различных положений элементов дискретизации в различных заданных точках вдоль траектории целевого ствола скважины, можно визуализировать, используя каротажную диаграмму переменной плотности или другое подходящее средство для получения возможности наблюдения непрерывных скважинных изображений прямого моделирования.
В одном варианте осуществления способы и системы, раскрытые в этой заявке, могут быть осуществлены с использованием системы обработки информации. В частности, система обработки информации может включать в себя считываемый компьютером носитель. В таком случае машиночитаемые команды, отражающие способы, раскрытые в этой заявке, могут сохраняться на считываемом компьютером носителе, а пользовательский интерфейс системы обработки информации можно использовать для мониторинга и управления выполнением различных этапов способа в соответствии с настоящим раскрытием. Кроме того, хотя некоторое количество этапов показано применительно к способам настоящего раскрытия, специалистам в соответствующей области техники должно быть понятно, что некоторые этапы способа могут быть исключены или изменены без отступления от объема настоящего раскрытия.
Соответственно, настоящее раскрытие делает возможным прямое вычисление псевдозначений при всех положениях элементов дискретизации вокруг траектории целевой скважины. В результате способ прямого моделирования, раскрытый в этой заявке, не зависит от конкретной конструкции каротажного прибора. В частности, в соответствии с предложенным способом непосредственно, без искажения демонстрируется геологическая модель пласта. В случае однородного пласта раскрытые способы можно использовать непосредственно при прямом моделировании для формирования скважинного изображения конкретных свойств пласта. В случае анизотропного пласта (то есть, пласта, имеющего свойства с различными значениями при измерениях в разных направлениях) способы также эффективны применительно к компонентам прямого моделирования, относящимся к анизотропным свойствам. Кроме того, раскрытые способы особенно эффективны в случаях, когда необходимо учитывать особый физический эффект и передаточные характеристики каротажного прибора. Соответственно, способы, раскрытые в этой заявке, можно применять для прямого моделирования гамма-излучения и плотности, а также прямого моделирования других свойств пласта, включая, но без ограничения ими, акустические свойства, удельное сопротивление, пористость и насыщение.
ПРИМЕР 1
Изображения плотности и гамма-излучения являются важными при геоуправлении, когда определяют истинное направление, в котором ствол скважины прорезает коллекторные пласты, и падение пласта наряду с кажущимися направлением и падением. Соответственно, прослеживание падений по изображениям плотности может дать ценную информацию для планирования траектории ствола скважины перед текущей траекторией, чтобы он оставался в оптимальном месте коллектора.
Способы и системы, раскрытые в этой заявке, были применены для прямого моделирования плотности и гамма-излучения с использованием патентованного программного обеспечения StrataSteer®3D для геоуправления, разработанного Halliburton Energy Services, Дункан, Оклахома. Заданные семейства кривых (псевдокаротажные диаграммы, полученные из выбранных соседних скважин) выбирали из выпадающего меню и глубину исследования и диаметр ствола скважины выбирали по умолчанию. Выходные данные записывали для интерпретации программным обеспечением StrataSteer®3D, выполняемой относительно целевого ствола скважины. Затем результаты прямого моделирования отображали в виде дорожки изображения на дисплее StrataSteer®3D.
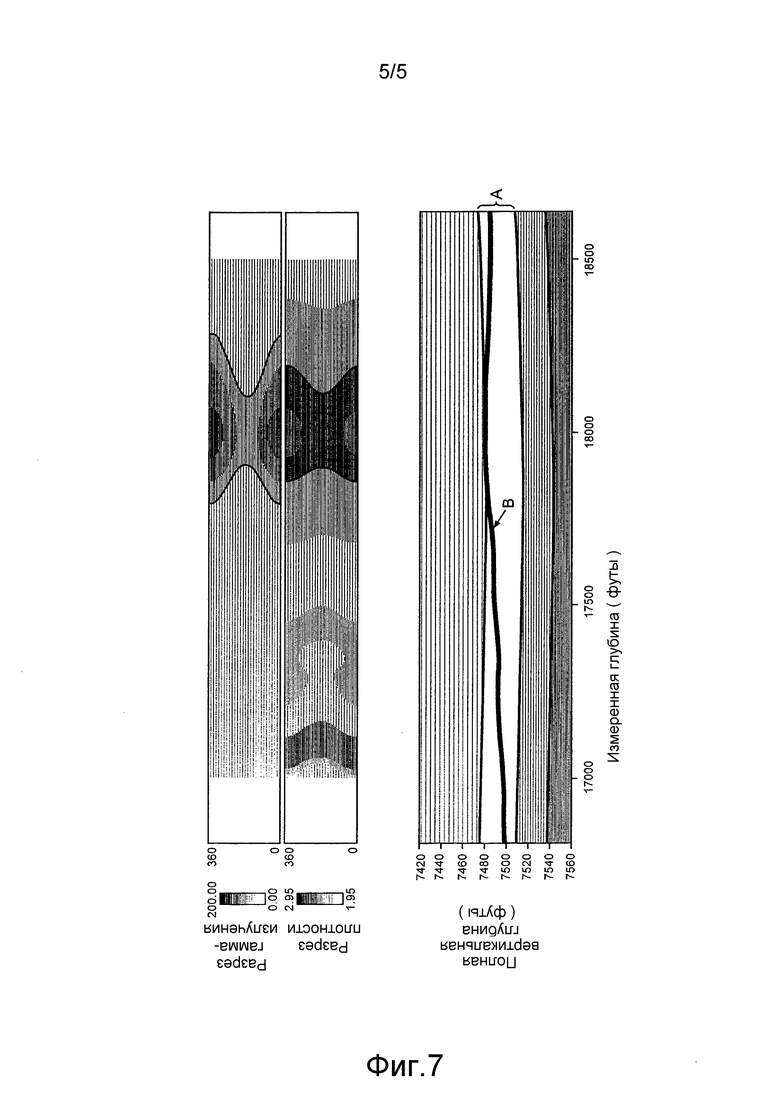
На фигуре 7 на виде в горизонтальном разрезе показан пример прямого моделирования данных гамма-излучения и плотности. Как показано на фигуре 7, от измеренной глубины 17000 футов (5182 м) до измеренной глубины 17500 футов (5334 м) на изображении глубины (нижняя дорожка) несомненно отображается больше информации, чем на изображении гамма-излучения (верхняя дорожка). Как можно видеть, имеются видимые изменения плотности пласта на разрезе, обозначенном «А» (на третьей дорожке показаны геология и поперечный разрез траектории скважины с использованием линии, обозначенной «В»), при этом пользователю видно, что траектория скважины образуется бурением по восстанию (вверх через пласты). Траектория скважины делается пологой, падения несколько опускаются и затем продолжается бурение по восстанию. Полученная прямым моделированием характеристика плотности является реминисценцией реальных данных, видимых при бурении почти параллельно пласту до бурения через него. Падения, выбранные из изображений прямого моделирования, находились в пределах 0,2° относительно падений, отраженных в геологической модели.
Таким образом, настоящее изобретение хорошо приспособлено для осуществления объектов и достижения упомянутых выше результатов, а также тех, которые присущи настоящему изобретению. Хотя изобретение было показано, описано и определено с обращением к примерам изобретения, такое обращение не означает ограничения изобретения и такое ограничение не должно предполагаться. Как должно быть понятно специалистам, имеющим выгоду от этого раскрытия, в изобретении допускаются значительные модификации, изменения и эквиваленты по форме и функции. Показанными и описанными примерами изобретение не исчерпывается. Следовательно, изобретение предполагается ограниченным только сущностью и объемом прилагаемой формулы изобретения, дающей полное понимание эквивалентов во всех отношениях.

Изобретение относится к способу и системе прямого моделирования скважинного изображения свойств пласта. Техническим результатом является повышение эффективности прямого моделирования скважинного изображения свойств пласта. Способ содержит этапы, на которых центрируют воображаемый круг, имеющий множество элементов дискретизации, на представляющем интерес месте в осевом положении вдоль целевого ствола скважины, при этом воображаемый круг помещают перпендикулярно к оси целевого ствола скважины. При этом воображаемый круг представляет область анализируемого пласта, определяют псевдокаротажную диаграмму, относящуюся к представляющему интерес параметру, в осевом положении вдоль целевого ствола скважины, при этом определение псевдокаротажной диаграммы в заданной точке содержит: образование первой соседней скважины и второй соседней скважины, при этом первая соседняя скважина и вторая соседняя скважина пересекают поверхность, соответствующую заданной точке, определение значений каротажных диаграмм представляющего интерес параметра в первой точке на поверхности, соответствующей первой соседней скважине, и во второй точке на поверхности, соответствующей второй соседней скважине; интерполирование значения каротажной диаграммы представляющего интерес параметра в первой точке и во второй точке для определения псевдокаротажной диаграммы в заданной точке, при этом псевдокаротажная диаграмма содержит по меньшей мере одно значение представляющего интерес параметра в заданной точке, соответствующей одному из множества элементов дискретизации, и визуализируют определенную псевдокаротажную диаграмму. 3 н. и 15 з.п. ф-лы, 7 ил., 1 пр.
1. Способ прямого моделирования скважинного изображения для анализа целевого ствола скважины в пласте, содержащий этапы, на которых:
центрируют воображаемый круг, имеющий множество элементов дискретизации, на представляющем интерес месте в осевом положении вдоль целевого ствола скважины,
при этом воображаемый круг помещают перпендикулярно к оси целевого ствола скважины;
при этом воображаемый круг представляет область анализируемого пласта;
определяют псевдокаротажную диаграмму, относящуюся к представляющему интерес параметру, в осевом положении вдоль целевого ствола скважины,
при этом определение псевдокаротажной диаграммы в заданной точке содержит: образование первой соседней скважины и второй соседней скважины, при этом первая соседняя скважина и вторая соседняя скважина пересекают поверхность, соответствующую заданной точке; определение значений каротажных диаграмм представляющего интерес параметра в первой точке на поверхности, соответствующей первой соседней скважине, и во второй точке на поверхности, соответствующей второй соседней скважине; интерполирование значения каротажной диаграммы представляющего интерес параметра в первой точке и во второй точке для определения псевдокаротажной диаграммы в заданной точке, при этом псевдокаротажная диаграмма содержит по меньшей мере одно значение представляющего интерес параметра в заданной точке, соответствующей одному из множества элементов дискретизации; и визуализируют определенную псевдокаротажную диаграмму.
2. Способ по п. 1, в котором получение координат целевого ствола скважины содержит использование по меньшей мере одного из метода минимальной кривизны, метода радиуса кривизны и тангенциального метода.
3. Способ по п. 1, дополнительно содержащий вычисление трехмерных координат множества элементов дискретизации.
4. Способ по п. 1, в котором интерполирование значения каротажной диаграммы представляющего интерес параметра содержит использование по меньшей мере одного из метода кригинга или метода обратных взвешенных расстояний.
5. Способ по п. 1, в котором визуализация определенной псевдокаротажной диаграммы содержит рендеринг каротажной диаграммы переменной плотности.
6. Система обработки информации со считываемым компьютером носителем, содержащим машиночитаемые команды на:
центрирование воображаемого круга, имеющего множество элементов дискретизации, на представляющем интерес месте в осевом положении вдоль целевого ствола скважины,
при этом воображаемый круг помещен перпендикулярно к оси целевого ствола скважины;
при этом воображаемый круг представляет область анализируемого пласта;
определение псевдокаротажной диаграммы, относящейся к представляющему интерес параметру, в осевом положении вдоль целевого ствола скважины,
при этом машиночитаемые команды на определение псевдокаротажной диаграммы в заданной точке содержат команды на:
определение значений каротажных диаграмм представляющего интерес параметра в первой точке, соответствующей первой соседней скважине, и во второй точке, соответствующей второй соседней скважине, при этом первая соседняя скважина и вторая соседняя скважина пересекают поверхность, соответствующую заданной точке, и первая точка, и вторая точка расположены на поверхности; и интерполирование значения каротажной диаграммы представляющего интерес параметра в первой точке и во второй точке для определения псевдокаротажной диаграммы в заданной точке, при этом псевдокаротажная диаграмма содержит по меньшей мере одно значение представляющего интерес параметра в заданной точке, соответствующей одному из множества элементов дискретизации; и
визуализацию определенной псевдокаротажной диаграммы.
7. Система обработки информации по п. 6, в которой
координаты целевого ствола скважины получаются с использованием по меньшей мере одного из метода минимальной кривизны, метода радиуса кривизны и тангенциального метода.
8. Система обработки информации по п. 6, дополнительно содержащая вычисление трехмерных координат множества элементов дискретизации.
9. Система обработки информации по п. 6, в которой в машиночитаемых командах на интерполирование значения каротажной диаграммы представляющего интерес параметра используется по меньшей мере один из метода кригинга или метода обратных взвешенных расстояний.
10. Система обработки информации по п. 6, в которой по машиночитаемым командам на визуализацию определенной псевдокаротажной диаграммы выполняется рендеринг каротажной диаграммы переменной плотности.
11. Способ моделирования свойства пласта из ствола скважины, содержащий этапы, на которых:
располагают воображаемый круг в первом осевом положении вдоль траектории ствола скважины, пересекающего пласт,
при этом воображаемый круг помещают по существу перпендикулярно к оси ствола скважины,
при этом воображаемый круг содержит множество элементов дискретизации;
вычисляют трехмерные координаты множества элементов дискретизации в первом осевом положении;
вычисляют псевдокаротажную диаграмму для каждого из множества элементов дискретизации в первом осевом положении,
при этом псевдокаротажная диаграмма отражает представляющий интерес параметр в первом осевом положении; и
визуализируют вычисленную псевдокаротажную диаграмму для каждого из множества элементов дискретизации в первом осевом положении.
12. Способ по п. 11, в котором псевдокаротажные диаграммы для каждого из множества элементов дискретизации вычисляют, используя данные каротажной диаграммы из одной или нескольких соседних скважин и интерпретированную структурную модель.
13. Способ по п. 11, дополнительно содержащий:
расположение воображаемого круга во втором осевом положении вдоль траектории ствола скважины, пересекающего пласт,
вычисление трехмерных координат множества элементов дискретизации во втором осевом положении;
вычисление псевдокаротажной диаграммы для каждого из множества элементов дискретизации во втором осевом положении,
при этом псевдокаротажная диаграмма отражает представляющий интерес параметр во втором осевом положении; и
визуализацию вычисленной псевдокаротажной диаграммы для каждого из множества элементов дискретизации во втором осевом положении.
14. Способ по п. 11, в котором вычисление трехмерных координат множества элементов дискретизации в первом осевом положении содержит использование по меньшей мере одного из метода минимальной кривизны, метода радиуса кривизны и тангенциального метода.
15. Способ по п. 11, в котором визуализация вычисленной псевдокаротажной диаграммы содержит рендеринг каротажной диаграммы переменной плотности.
16. Способ по п. 11, в котором вычисление псевдокаротажной диаграммы для каждого из множества элементов дискретизации содержит:
выбор одного из множества элементов дискретизации;
образование первой соседней скважины и второй соседней скважины, при этом первая соседняя скважина и вторая соседняя скважины пересекают поверхность, соответствующую выбранному одному из множества элементов дискретизации;
определение значений каротажных диаграмм представляющего интерес параметра в первой точке, соответствующей первой соседней скважине, и во второй точке, соответствующей второй соседней скважине,
при этом первую точку и вторую точку располагают на поверхности;
интерполирование значений каротажных диаграмм представляющего интерес параметра в первой точке и во второй точке для определения псевдокаротажной диаграммы в выбранном одном из множества элементов дискретизации.
17. Способ по п. 16, в котором интерполирование значения каротажной диаграммы представляющего интерес параметра содержит использование по меньшей мере одного из метода кригинга или метода обратных взвешенных расстояний.
18. Способ по п. 11, в котором представляющий интерес параметр выбирают из группы, состоящей из плотности, пористости и насыщения.
| WO 2006053294 A1, 18.05.2006 | |||
| СИСТЕМА И СПОСОБ ДЛЯ ВИЗУАЛИЗАЦИИ ДАННЫХ В ТРЕХМЕРНОЙ СЦЕНЕ | 2004 |
|
RU2349959C2 |
| СИСТЕМА И СПОСОБ АДАПТИВНОГО ПРИСВАИВАНИЯ МЕТОК МНОГОМЕРНЫМ ИЗОБРАЖЕНИЯМ | 2003 |
|
RU2316820C2 |
| US 2005140373 A1, 30.06.2005. | |||

