Настоящее изобретение относится к регуляторам постоянного тока, в частности к регуляторам, используемым для подачи электрической энергии в аэродромные световые приборы.
Регуляторы постоянного тока описанного выше типа известны, например, из документа US 2010/283400. Назначение регуляторов постоянного тока заключается в регулировании уровня выходного тока относительно рабочей точки, которая может быть, например, задана оператором или из командно-диспетчерского пункта аэропорта. Уровень выходного тока необходимо обеспечить по возможности постоянным вблизи предварительно заданной рабочей точки с тем, чтобы гарантировать, что аэродромные световые приборы будут излучать свет постоянной интенсивности. Поскольку в зависимости от обстоятельств целесообразно использовать различные уровни интенсивности (например, днем или ночью, при хорошей или плохой видимости), рабочие точки могут меняться, вследствие чего необходимо, чтобы регулятор постоянного тока был способен соответствующим образом регулировать уровень выходного тока.
Аэродромные световые приборы, как правило, подключены посредством длинных последовательных соединений. Длина и количество световых приборов в таких последовательных соединениях и, соответственно, поступающая электроэнергия могут быть различными для различных аэропортов, для различных типов световых приборов и их использования. Таким образом, производителям регуляторов постоянного тока следует выпускать широкий ассортимент регуляторов постоянного тока, каждый из которых будет соответствовать конкретному входному напряжению в сети и частоте, выходному току и мощности оборудования. Это приводит к наличию большого количества различных артикулов регуляторов постоянного тока, что требует больших складских мощностей, производственных ресурсов и затрат.
Надежность регуляторов постоянного тока является еще одним аспектом, поскольку она определяет важные вопросы безопасности. Как известно, в аэропортах устанавливают полный набор резервных блоков регуляторов постоянного тока, что требует огромных дополнительных площадей и влечет за собой значительное повышение затрат.
Попытка решить проблему надежности описана в документе US 2010/026207, в котором предложен сдвоенный блок преобразования напряжения, соединенный последовательно с общим трансформатором, работающим на частоте сети (50/60 Гц). В данном техническом решении идея заключается в том, чтобы добавить резервный (неработающий) блок преобразования напряжения, который может быть легко заменен. В случае отказа, работающий и неработающий блоки преобразования напряжения могут быть переключены автоматически, так что неисправная часть может быть заменена позже во время технического обслуживания.
Согласно упомянутому документу не исключена возможность использования двух блоков преобразования напряжения одновременно для обеспечения функционирования регулятора постоянного тока, однако не раскрыто, каким образом следует осуществить подобную совместную работу. Кроме того, в упомянутом документе описан общий блок управления, предназначенный для управления работой упомянутых блоков преобразования напряжения и обеспечивающий срабатывание переключателей, выполненных с возможностью включения и отключения того или иного блока преобразования напряжения.
Система, раскрытая в документе US 2010/026207, является более надежной, но имеет высокие затраты на каждый блок регулятора постоянного тока, поскольку каждый блок регулятора постоянного тока теперь должен иметь дополнительный блок преобразования напряжения, идентичный тому, что уже имеется в наличии.
В публикации «Преобразователь переменного напряжения в переменное с последовательным входом и параллельным выходом» («Input-series output-parallel AC/AC converter», Hu Wei et al., 2010 5th IEEE Conference on industrial electronics and applications, 1 June 2010, pages. 1018-1022), раскрыт двухуровневый преобразователь переменного напряжения в переменное с высокочастотной линией, которую можно использовать в системах с высоким входным напряжением и относительно низким выходным напряжением. Такая цепь не может быть использована в аэродромных осветительных установках по причине их ограниченной мощности. Кроме того, недостатком такой цепи является то, что она не надежна, поскольку для получения необходимого выходного напряжения требуется функционирование обоих уровней.
Из документа ЕР 1063758 известен блок питания, содержащий несколько импульсных преобразователей резонансного типа, соединенных параллельно. Такие устройства позволяют подвести к нагрузке большую мощность. Однако описанные устройства отличаются выходным напряжением постоянного тока, которое не применяется для аэродромных осветительных установок, поскольку к аэродромным осветительным установкам всегда необходимо подводить переменный ток для защиты кабелей и разъемов от коррозии, а также для того, чтобы обеспечить возможность использования трансформаторов при подсоединении световых приборов к линии питания для молниезащиты, независимо от типа световых приборов (ламп накаливания или светодиодов).
В документе US 2002/0074862 раскрыта система параллельных источников питания, содержащая несколько блоков питания, причем упомянутая система скомпонована так, что даже в случае отказа одного блока питания, подача мощности может быть обеспечена другим блоком питания. Описанная система, однако, из входного напряжения переменного тока генерирует выходное напряжение постоянного тока и, соответственно, не может быть использована для подачи мощности в аэродромные осветительные установки. При этом каждый блок питания содержит высокочастотный трансформатор, к первичной обмотке которого поступает высокочастотный импульсный ток.
Задача настоящего изобретения заключается в том, чтобы предложить регулятор постоянного тока, в котором устранены описанные выше недостатки. В частности, задача заключается в том, чтобы предложить регулятор постоянного тока, который позволяет решить не только проблему надежности, но и проблему экономической эффективности. Задача также состоит в том, чтобы предложить регулятор постоянного тока, имеющий по меньшей мере такую же и, по возможности, более высокую надежность. Кроме того, задача настоящего изобретения заключается в том, чтобы предложить регулятор постоянного тока, являющийся более экономичным с точки зрения изготовлении. Еще одна задача настоящего изобретения состоит в том, чтобы предложить регулятор постоянного тока, имеющий повышенный срок службы и работающий с более высоким КПД.
По мнению авторов настоящего изобретения, можно повысить надежность системы по сравнению с описанными выше техническими решениями, достигая при этом сокращения производственных затрат посредством модульного построения регулятора постоянного тока из нескольких идентичных модулей, каждый из которых по сути сам по себе является регулятором постоянного тока.
Таким образом, в настоящем изобретении предложен регулятор постоянного тока, раскрытый в прилагаемой формуле изобретения. Упомянутый регулятор постоянного тока содержит множество модулей предпочтительно с одинаковыми номинальными характеристиками, причем каждый модуль выполнен с возможностью обеспечения выходного тока и напряжения модуля, которые вносят вклад в выходную мощность регулятора постоянного тока. Согласно настоящему изобретению каждый модуль по сути сам по себе является регулятором постоянного тока, имеющим свой соответствующий трансформатор и микроконтроллер. Регулятор постоянного тока оснащен сетью передачи данных, выполненной с возможностью обмена данными между микроконтроллерами. Передача данных организована таким образом, что один или несколько модулей предпочтительно можно добавить или удалить из регулятора постоянного тока, не оказывая влияния на способность других модулей обмениваться данными друг с другом и функционировать одновременно с тем, чтобы совместно обеспечивать выходную мощность. В результате, получен регулятор постоянного тока, который является в полной мере модульным, как для входного каскада, так и для выходного каскада, а также на уровне управления.
В то время как в техническом решении, раскрытом в документе US 2010/026207, модульное исполнение имеет только блок преобразования напряжения (т.е. только входной каскад), в настоящем изобретении модульное исполнение характерно для всех компонентов регулятора постоянного тока. Преимущество модульности заключается в том, что на основе одного и того же модуля регулятора постоянного тока можно скомпоновать регуляторы постоянного тока с различными номинальными выходными характеристиками. Это существенно снижает количество различных компонентов, которые производителям необходимо хранить на складе или производить. Например, регуляторы постоянного тока для всех существующих номинальных значений мощности могут быть изготовлены с использованием одного и того же (небольшого) трансформатора, что устраняет необходимость наличия трансформаторов разных размеров, от небольших до более крупных. Поскольку можно производить один и тот же трансформатор в больших количествах, может быть достигнута экономия за счет увеличения масштабов производства. В качестве дополнительного преимущества полностью модульное исполнение позволяет достичь повышенной надежности. В самом деле, регуляторы постоянного тока, раскрытые в документе US 2010/026207, выйдут из строя в случае неисправности центрального контроллера или в случае неисправности общего выходного каскада. Это не произойдет с регуляторами постоянного тока, предложенными в настоящем изобретении, поскольку упомянутые каскады входят в состав модульной конструкции. Другие упомянутые выше документы также не раскрывают подобной модульности.
Предпочтительные аспекты изложены в зависимых пунктах формулы изобретения.
Согласно еще одному аспекту в настоящем изобретения предложен модуль, предназначенный для использования в предлагаемом регуляторе постоянного тока и раскрытый в прилагаемой формуле изобретения.
Далее приведено подробное описание аспектов настоящего изобретения со ссылками на прилагаемые чертежи, на которых изображено следующее.
На фиг. 1 представлена общая схема предлагаемого в настоящем изобретении регулятора постоянного тока.
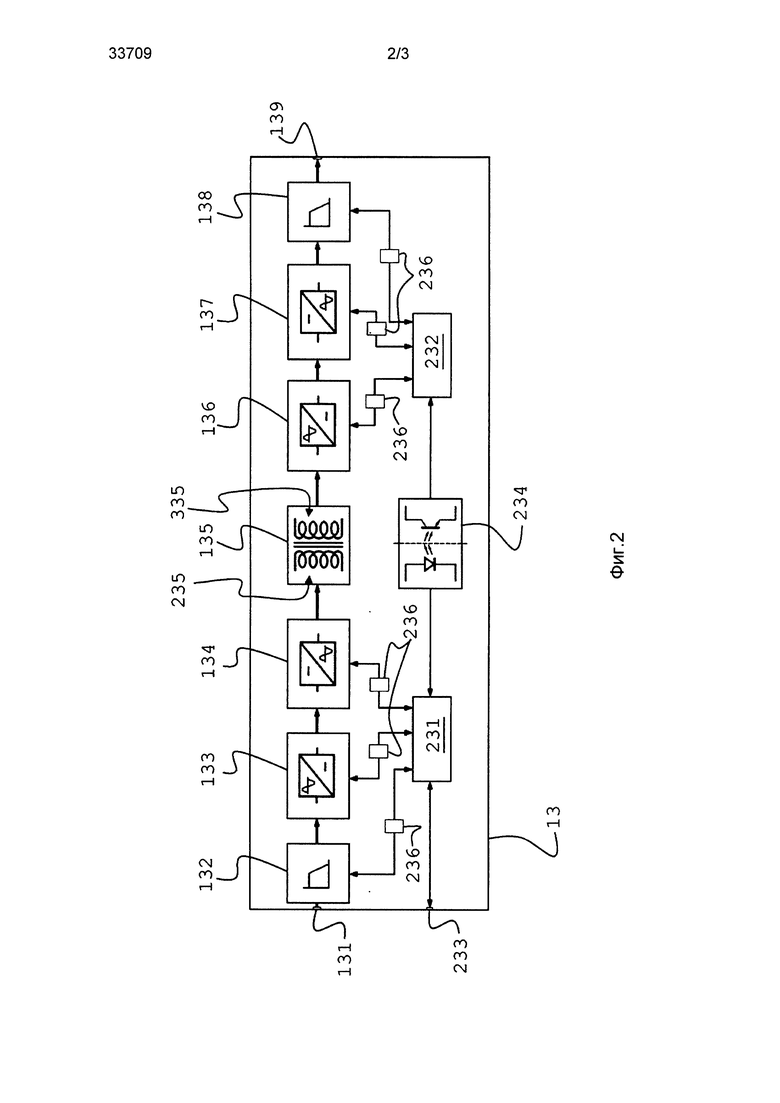
На фиг. 2 схематично показан модуль питания предлагаемого регулятора постоянного тока.
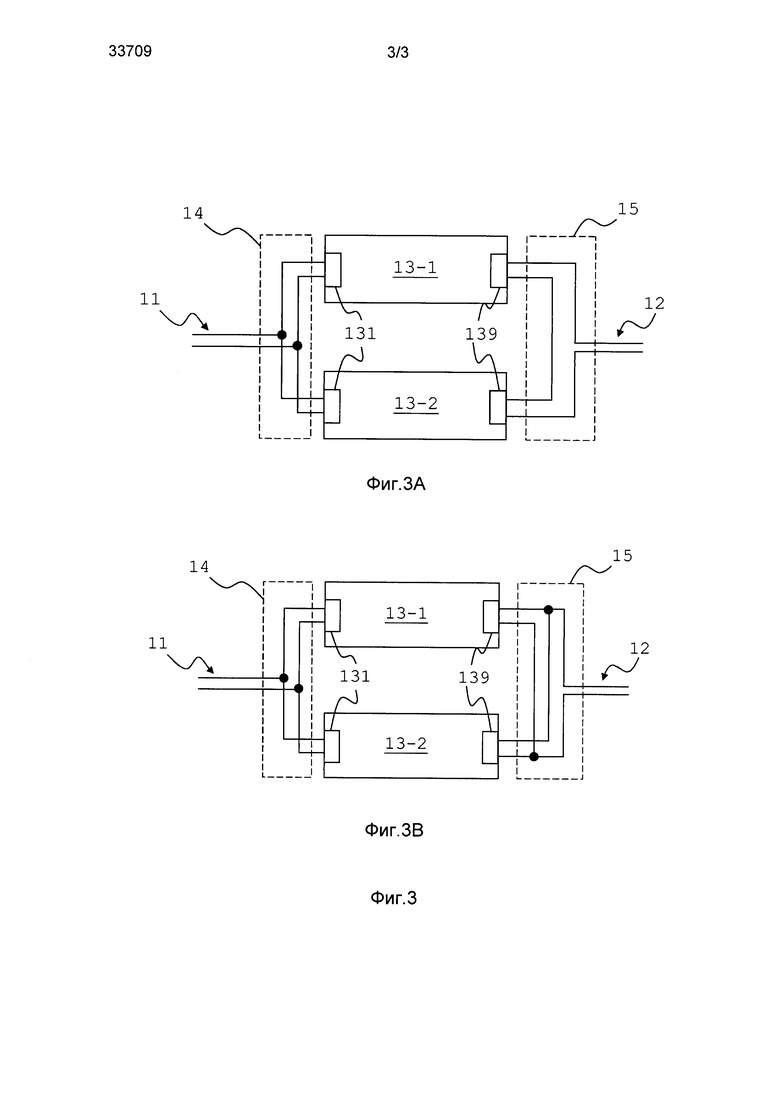
На фиг. 3 представлены схемы входного и выходного соединения модулей питания для приведенного в качестве примера регулятора постоянного тока, содержащего два модуля питания. На фиг. 3A представлена схема соединения, в которой выходы модулей питания соединены последовательно. На фиг. 3В представлена схема соединения, в которой выходы модулей питания соединены параллельно.
Следует отметить, что уровни тока и напряжения, приведенные в настоящем описании, относятся к их среднеквадратичным (rms) значениям. Таким образом, уровень тока в 1 А представляет собой 1 А среднеквадратичного тока, а уровень напряжения в 1 В представляет собой 1 В среднеквадратичного напряжения.
Также следует отметить, что термины «номинальная мощность», «номинальный ток» или «номинальное напряжение» относятся соответственно к максимальной рабочей мощности, току или напряжению.
На фиг. 1 представлена схема предлагаемого в настоящем изобретении регулятора 10 постоянного тока, имеющего вход 11 питающей линии для соединения с сетью электропитания и выход 12 мощности для соединения со схемой 9 последовательного соединения световых приборов. Упомянутая схема 9 последовательного соединения, как правило, сформирована из последовательно соединенных трансформаторов 92, первичные обмотки которых последовательно соединены в упомянутой схеме 9, а вторичные обмотки соединены со световыми приборами 91.
Упомянутый регулятор 10 постоянного тока сформирован из модульных блоков 13-1, 13-2, …, 13-n, называемых далее модулями 13 мощности. Упомянутые модули 13 мощности соединены с входом 11 питающей линии посредством соединений 14 входной мощности, образующих проводной интерфейс между упомянутым входом 11 питающей линии и линейным входом 131 каждого модуля 13 питания (см. фиг. 2). Упомянутые модули питания соединены с упомянутым выходом 12 мощности регулятора 10 постоянного тока посредством соединений 15 выходной мощности.
Соединения 14 входной мощности обеспечивают параллельное электрическое соединение модулей 13-1, …,13-n с входом 11 питающей линии, как схематично показано на фиг. 3.
Со ссылкой на фиг. 2, следует отметить, что каждый модуль 13 питания по сути сам по себе является регулятором постоянного тока. Таким образом, упомянутый модуль 13 питания способен обеспечивать выходную мощность (ток и напряжение), которую можно предпочтительно напрямую подавать на выход 12 мощности регулятора 10 постоянного тока и, соответственно, в упомянутую схему 9 последовательного соединения без какой-либо дополнительной гальванической изоляции или коррекции уровня.
Все модули 13-1, …, 13-n питания предпочтительно являются по существу одинаковыми в том, что они имеют одинаковые максимальную рабочую (номинальную) мощность, ток и напряжение. Как и каждый регулятор постоянного тока, каждый модуль питания также выполнен с возможностью обеспечения выходной мощности и формирования тока, соответствующего предварительно заданному уровню. Выходное напряжение связано с током и выходным сопротивлением и может меняться от нуля до максимального (номинального) напряжения.
Для этого упомянутый модуль 13 питания предпочтительно содержит входные каскадные цепи 132-134 и выходные каскадные цепи 136-138, гальванически развязанные, согласно национальным стандартам, например стандартам Федерального управления гражданской авиации ФАА (FAA) или Международной электротехнической комиссии МЭК (IEC), посредством трансформатора 135. Упомянутый трансформатор 135 может, например, обеспечивать гальваническую изоляцию, превышающую или равную 23 кВ.
Упомянутые входные каскадные цепи могут содержать низкочастотный фильтр 132, предназначенный для фильтрации линейного входа 131 модуля 13 питания.
Упомянутые входные каскадные цепи содержат цепь преобразования напряжения, схематично показанную в виде блоков 133-134 на фиг. 2. Цепь 133-134 преобразования напряжения предпочтительно выполнена с возможностью генерирования регулируемого напряжения, в значительной степени независимого от уровня входного напряжения и от частоты входного напряжения (например, частоты сети 50 или 60 Гц). Цепь преобразования напряжения предпочтительно содержит выпрямительный блок 133, за которым следует блок 134 инвертора мощности. Упомянутый выпрямительный блок 133 может быть основан на диодномостовой схеме, выполненной с возможностью преобразования сигнала переменного тока (например, предпочтительно фильтрованного линейного входного сигнала с частотой сети) в сигнал постоянного тока. Упомянутый блок 134 инвертора мощности выполнен с возможностью преобразования сигнала постоянного тока от выпрямителя 133 в сигнал переменного тока. Таким образом, он предпочтительно содержит цепь резонансного LLC-преобразователя, перед которой может быть предусмотрена цепь корректора коэффициента мощности (ККМ), предпочтительно ККМ с чередованием.
Регулируемое выходное напряжение цепи 133-134 преобразования напряжения предпочтительно является высокочастотным переменным напряжением, например, по меньшей мере с частотой в 1 кГц, предпочтительно по меньшей мере в 10 кГц, предпочтительно по меньшей мере в 20 кГц, предпочтительно по меньшей мере в 25 кГц, предпочтительно по меньшей мере в 30 кГц. Высокочастотное переменное напряжение может иметь частоту, меньшую или равную 100 кГц. Получение таких высокочастотных сигналов можно обеспечить посредством цепи высокочастотного квазирезонансного LLC-преобразователя мощности. Одна из таких цепей высокочастотного квазирезонансного LLC-преобразователя мощности раскрыта в интернет-статье под названием «Резонансный LLC-преобразователь с фазовым сдвигом на основе мостовой схемы» («Phase Shifted Full Bridge LLC Resonant Converter»), авторами которой являются Мартин Жанг (Martin Zhang) и Собер Ху (Sober Hu) и которая доступна по следующему веб-адресу: http://blog.dianyuan.eom/blog/u/42/1150776421.pdf, причем содержание упомянутой статьи включено в настоящий документ путем ссылки.
Преимущество высокочастотного выходного напряжения во входном каскаде заключается в том, что размер и вес трансформатора 135, а соответственно, и затраты на его изготовление могут быть значительно сокращены. Например, высокочастотный трансформатор, работающий на частоте около 40 кГц, меньше в 10-20 раз по весу и размерам по сравнению со своим аналогом, работающим на частоте 50 Гц.
Кроме того, для приведенных высокочастотных напряжений потери мощности, обусловленные высоким частотами, остаются приемлемыми, так что достигается оптимальный баланс между уменьшением размеров и потерями мощности.
Таким образом, цепь резонансного LLC-преобразователя соединена с первичной обмоткой 235 трансформатора 135. Вторичная обмотка 335 трансформатора 135 соединена с выходными каскадными цепями 136-138, которые могут содержать: выпрямительную диодномостовую схему 136 и цепь 137 транзисторного Н-мостового инвертора, которые обеспечивают регулируемый выход 139 модуля (по току и напряжению). Упомянутая цепь 137 транзисторного Н-мостового инвертора предпочтительно выполнена с возможностью функционирования на высоких частотах, например на тех, что были приведены выше применительно к цепи 133-134 преобразования напряжения. Между мостовой схемой 137 и выходом 139 модуля может быть предусмотрен низкочастотный фильтр 138. Регулируемый выход 139 обычно, хотя и не обязательно, представляет собой низкочастотный немодулированный синусоидальный выходной сигнал переменного тока с частотой сети обычно 50 или 60 Гц. Также возможны регулируемые выходные сигналы другой формы, например сигнал пульсирующего постоянного тока.
Упомянутый выходной низкочастотный фильтр 138 предпочтительно выполнен с возможность фильтрации любых компонентов сигнала приведенной выше высокой частоты (т.е. рабочей частоты выпрямителя и транзисторного Н-мостового инвертера). Работа при таких высоких частотах является предпочтительной, поскольку обеспечивает возможность создания выходного низкочастотного фильтра 138, имеющего меньшие размеры и экономически более выгодного, чем выходные фильтры, используемые в известных регуляторах постоянного тока и обычно функционирующие на частотах, составляющих несколько сотен герц.
Как показано на фиг. 3А, выходы 139 модулей 13-1, …, 13-n питания могут быть соединены последовательно для того, чтобы регулируемый выходной ток регулятора 10 постоянного тока представлял собой максимальный номинальный выходной ток одного модуля питания, но при этом обеспечивалась более высокая выходная мощность регулятора постоянного тока по сравнению с мощностью каждого отдельного модуля питания, поскольку регулируемое выходное напряжение регулятора постоянного тока является суммой выходных напряжений модулей. В качестве примера рассмотрим модули питания номинальной мощностью 5 кВТ (на резистивной нагрузке) с номинальным выходным током 6,6 А. Тогда номинальное выходное напряжение каждого модуля питания составит 757 В. Последовательное соединение выходов модулей питания позволяет получить выходной ток упомянутого регулятора постоянного тока в виде максимального номинального выходного тока модуля питания (6,6 А), но с переменной мощностью, зависящей от количества модулей питания, соединенных последовательно. Последовательное соединение четырех таких модулей питания позволяет получить регулятор постоянного тока с номинальной выходной мощностью 20 кВТ ≈6,6А×(4×757В).
В альтернативном варианте, как показано на фиг. 3В, выходы 139 модулей питания могут быть соединены параллельно для получения выходного тока упомянутого регулятора постоянного тока в виде суммы выходов модулей питания. Например, параллельное соединение трех упомянутых выше модулей питания обеспечивает возможность получения регулятора постоянного тока с максимальным номинальным выходным током, равным около 20 А, при уровне напряжения 757 В.
Также можно комбинировать последовательные и параллельные соединения модулей питания, например последовательное соединение двух групп из двух модулей на 5 кВТ, соединенных параллельно, позволяет получить регулятор постоянного тока на 20 кВТ с максимальным выходным током 12 А.
Электрическое соединение модулей 13-1, …, 13-n питания в описанных выше последовательных или параллельных соединениях предпочтительно представляет собой жесткопроводное соединение.
Таким образом, согласно настоящему изобретению все выходы модулей питания выполнены таким образом, что они способствуют получению (совокупного) выхода 12 регулятора постоянного тока. Существуют различные способы осуществления взаимодействия между модулями 13 питания для обеспечения предварительно заданного выхода 12 мощности регулятора постоянного тока, задаваемого извне, например, из командно-диспетчерского пункта аэропорта или оператором.
Предпочтительный способ осуществления такого взаимодействия между модулями питания основан на протоколе передачи данных без главного (или с множеством главных). Это означает, что ни один из модулей питания не будет действовать в качестве главного модуля, определяя вклад каждого модуля питания в выход регулятора постоянного тока, а, наоборот, каждый модуль питания будет находиться на одном и том же уровне в иерархии модулей питания, при этом каждый модуль питания будет самостоятельно определять свой соответствующий выходной уровень 139 модуля, основанный на предварительно заданном выходе всего регулятора 10 постоянного тока (т.е. выходе всех модулей 13 питания) и на выходе, заданном другими модулями питания. Это происходит благодаря тому, что модули 13 питания почти постоянно обмениваются данными друг с другом для получения эффективного взаимодействия.
Альтернативный способ осуществления взаимодействия и обмена данными между модулями основан на протоколе передачи данных, построенном по принципу «главный-подчиненный». В таком протоколе главный модуль предпочтительно может автоматически сменяться в случае, когда модуль 13 питания добавляют или удаляют в или из регулятора 10 постоянного тока. Например, когда модуль 13 питания добавляют в регулятор постоянного тока, то он автоматически получает адрес для передачи данных, который может быть основан на порядковом номере или уникальном идентификаторе любого из компонентов модуля питания. Таким образом, упомянутый адрес может быть реализован аппаратными средствами. Упомянутый адрес сравнивают с адресами других модулей питания, при этом протокол может описывать, что, например, модуль питания, имеющий самый низкий или самый высокий адрес, действует в качестве главного модуля, управляя передачей данных, а другие модули являются подчиненными. Такая процедура гарантирует, что в случае отказа текущего главного модуля, регулятор постоянного тока может продолжать работать за счет автоматического обеспечения нового главного модуля.
Протокол, построенный по принципу «главный-подчиненный», в котором главный модуль может быть автоматически переназначен, может также называться протоколом без главного.
Для реализации любого из упомянутых выше протоколов регулятор 10 постоянного тока предпочтительно содержит сеть 17 передачи данных, соединенную со всеми модулями 13 питания. Сеть 17 передачи данных может быть реализована с любой топологией и предпочтительно в виде коммуникационного кольца. Она может быть реализована, например, в виде CAN-шины.
Для того чтобы обеспечить возможность обмена и соответствующей обработки информации, каждый модуль 13 питания оснащают микропроцессором (микроконтроллером) 231, подсоединенным к сети 17 передачи данных посредством порта 233 передачи данных. Микроконтроллер 231 может быть выполнен с возможность управления входными каскадными цепями 132-134. Модуль 13 питания может содержать второй микропроцессор (микроконтроллер) 232, выполненный с возможностью управления выходными каскадными цепями 136-138. Выходной каскадный микропроцессор 232 может обмениваться данными с входным каскадным микропроцессором 231 и с сетью 17 передачи данных либо напрямую, либо, как показано на фиг. 2, через входной каскадный микропроцессор 231. Кроме того, выходной каскадный микроконтроллер 232 может быть объединен с входным каскадным микроконтроллером 231. Гальваническая изоляция между двумя микропроцессорами 231-232 может быть обеспечена посредством оптической развязки 234 и/или посредством оптической передачи данных.
В случае, когда реализован упомянутый выше протокол передачи данных, построенный по принципу «главный-подчиненный», адрес, выделенный для каждого модуля питания, может быть основан на электронной подписи чипа микроконтроллера, которая является уникальным идентификатором.
Сеть 17 передачи данных может дополнительно быть подсоединена к интерфейсу 18 дистанционного управления, предусмотренному в регуляторе 10 постоянного тока и выполненному с возможностью установления удаленного соединения с любым объектом удаленного управления, например, командно-диспетчерским пунктом аэропорта. Сеть 17 передачи данных может быть соединена с человеко-машинным интерфейсом 19, предусмотренным в регуляторе 10 постоянного тока и позволяющим оператору управлять работой регулятора постоянного тока, например, во время технического обслуживания.
Сеть 17 передачи данных предпочтительно реализована посредством выделенной совместно используемой структуры данных, которая содержит информацию, относящуюся к различным компонентам оборудования. Модули 13 питания и другие компоненты регулятора 10 постоянного тока, например интерфейс 18 дистанционного управления, управляют упомянутой совместно используемой структурой данных согласно заданным правилам приоритета.
Таким образом, обеспечивается модульность, причем регулятор 10 постоянного тока предпочтительно имеет возможность функционировать даже тогда, когда один или несколько модулей питания неисправны. Кроме того, можно даже предусмотреть один или несколько резервных модулей 13 питания, которые можно надлежащим образом ввести в эксплуатацию в случае отказа еще одного модуля питания. Упомянутые признаки могут быть реализованы программными средствами, выполняемыми в микроконтроллере 231.
Реализация упомянутой структуры данных предпочтительно обеспечивает возможность понимания каждым компонентом оборудования и, в частности, понимания модулями 13 питания того, как собран регулятор 10 постоянного тока, например понимания, сколько в регуляторе постоянного тока предусмотрено модулей питания и как они соединены. Реализованная структура данных предпочтительно позволяет добавлять модули питания или другие компоненты оборудования без необходимости перепрограммирования регулятора 10 постоянного. Реализованная структура данных предпочтительно позволяет оптимизировать эффективность совокупной мощности регулятора постоянного тока путем регулирования выходов отдельных модулей питания, что приведет к сохранению энергии и, соответственно, к экологически безопасной работе. Реализованная структура данных предпочтительно позволяет изменить конфигурацию системы в случае отказа, в результате чего, когда модуль питания выходит из строя, остальные модули питания могут обеспечить недостающую выходную мощность.
Модули 13-1, …, 13-n питания могут взаимодействовать между собой следующим образом. Командно-диспетчерский пункт аэропорта (не показан) устанавливает предварительно заданный уровень яркости (например, от 1 до 5), который преобразуется в уровень выходного тока регулятора 10 постоянного тока, поступающий через интерфейс 18 дистанционного управления в сеть 17 передачи данных. Новая установленная точка считывается всеми микроконтроллерами 231 модулей 13-1, …, 13-n питания. В зависимости от (сетевого) протокола передачи данных либо микроконтроллеры 231 могут начать обмениваться друг с другом данными по сети 17 передачи данных так, что каждый микроконтроллер 231 устанавливает выходной уровень 139 для своего соответствующего модуля 13 питания, либо микроконтроллер 231 главного модуля питания может определять выходные уровни 139 для каждого (подчиненного) модуля питания после считывания нового уровня яркости. Рассмотрим в качестве примера регулятор постоянного тока, имеющий три одинаковых модуля питания с номинальным выходным током 6,6 А при напряжении 757 В, соединенных параллельно. В этом случае максимальный (номинальный) совокупный выход регулятора постоянного тока, как было пояснено выше, составляет 20 А при напряжении 757 В. Теперь установим уровень выходного тока регулятора постоянного тока на 15 А, при этом микроконтроллеры 231 и, по возможности, 232 будут обмениваться друг с другом данными так, чтобы установить выходной уровень каждого модуля питания на 5 А. Когда командно-диспетчерский пункт установит уровень выходного тока регулятора постоянного тока на 7 А, то система сможет принять решение оставить в работе два модуля питания с уровнем выходного тока в 3,5 А и сохранить один модуль питания отключенным, поскольку система наиболее эффективна при работе модуля питания на уровнях, близких к номинальным выходным уровням. Такие алгоритмы управления предпочтительно могут быть реализованы программными средствами в микроконтроллерах 231 модулей 13 питания согласно изобретению.
Благодаря этому, выходной уровень регулятора постоянного тока предпочтительно может достичь установленного (предварительно заданного) уровня в течение нескольких миллисекунд.
Модули 13-1, …, 13-n питания, соединенные последовательно и/или параллельно в регуляторе 10 постоянного тока, предпочтительно синхронизированы для обеспечения выходного тока и напряжения 139, которые предпочтительно находятся в фазе с линейным входом. Это обеспечивает возможность падения максимальной выходной мощности в те же моменты времени, когда входная мощность линейного входа является максимальной. Каждый модуль предпочтительно обеспечивает соответствующую синхронизацию между выходным сигналом (на выходе 139) и входным сигналом (на входе 131). Для этого каждый модуль может содержать фазовый детектор, по возможности соединенный с входным фильтром 132, причем каждый микроконтроллер 231 может считывать с фазового детектора время линейного изменения фазы.
Возможный способ получения синхронизации между выходным сигналом (на выходе 139) и входным сигналом (на входе 131) заключается в считывании/детектировании микроконтроллером 231 прохождения нулевого уровня входного сигнала. Сигнал, синхронный с детектированным прохождением нулевого уровня, создается микроконтроллером 231 (или же, в зависимости от ситуации, выходным каскадным микроконтроллером 232). Такой сигнал предпочтительно представляет собой прямоугольный сигнал на частоте линейного входа, например 50 Гц или 60 Гц. Упомянутый сигнал может использоваться выходными каскадными цепями для генерации выходной синусоидальной волны с такими же пересечениями нулевого уровня.
Регулятор 10 постоянного тока предпочтительно содержит выходной измерительный блок 16, выполненный с возможностью измерения параметров выхода 12 мощности регулятора 10 постоянного тока, например уровней напряжения и тока, информации о фазе и частоте, и других параметров, относящихся к работе модуля, например индуктивности нагрузки и сопротивления на землю. Выходной измерительный блок 16 предпочтительно подсоединен к сети 17 передачи данных, обеспечивая возможность передачи результатов измерения по каналу обратной связи в модули 13 питания так, чтобы они могли регулировать свои выходы 139.
Выходной измерительный модуль 16 может быть выполнен с возможностью измерения выходного параметра, отражающего информацию о фазе выходного сигнала. Выходной измерительный модуль 16 может содержать электронную схему, например микропроцессор, предназначенный для обработки измеренного выходного параметра с тем, чтобы вычислить резистивную часть и реактивную часть нагрузки. Такая информация может быть отправлена по сети 17 передачи данных в микроконтроллеры 231, которые могут адаптировать выходные параметры, например, форму профиля выходной мощности, к различным типам цепей возбуждения (освещения) (резистивных, индуктивных или емкостных).
Выходной измерительный модуль 16 предпочтительно выполнен с возможностью измерения одного или нескольких параметров выхода 12 мощности регулятора постоянного тока с интервалами времени, меньшими или равными 100 мкс, например около 50 мкс. Интервал времени между измерениями может быть меньше или равен 5 мкс, предпочтительно от 1 мкс до 3 мкс.
Модули 13 предпочтительно выполнены с возможностью считывания данных, относящихся к фазе и передаваемых упомянутым измерительным блоком 16, а также с возможностью использования упомянутых данных, относящихся к фазе, для фазовой синхронизации выходного сигнала. Такая фазовая синхронизация, основанная на «внешних» данных (по отношению к каждому модулю), может быть предусмотрена дополнительно или в качестве альтернативы к «внутренней» фазовой синхронизации между линейным входом и выходом модуля, как описано выше. В случае дополнительной синхронизации, фазовая синхронизация, основанная на «внешних» данных, может обеспечивать повышение точности «внутренней» синхронизации.
Следует отметить, что, поскольку выход регулятора постоянного тока представляет собой низкочастотный сигнал переменного тока, обычно с частотой 50 или 60 Гц, время синхронизации не является критичным.
Модули 231 питания предпочтительно имеют программные средства, которые во время выполнения в микроконтроллерах 231 позволяют управлять по меньшей мере входными каскадами модулей питания и предпочтительно как входными, так и выходными каскадами. Благодаря этому достигается усовершенствованное по сравнению с уровнем техники управление системой, что повышает ее гибкость и надежность. Такая гибкость, частично основанная на реализации некоторых функций с помощью программных средств, обеспечивает работу регулятора постоянного тока в различных режимах в соответствии с требованиями пользователя. «Зеленый режим» можно реализовать путем полного выключения модуля в случае, когда на выходе регулятора постоянного тока требуется низкая мощность. В случае, когда требуется скорость, все модули могут быть постоянно включенными для обеспечения быстрого времени реакции. Другие режимы могут быть реализованы путем обновления программных средств без какого-либо изменения в аппаратной части.
Микроконтроллер предпочтительно может быть запрограммирован для реализации одной или нескольких цифровых петель P/PI/PID обратной связи. Такие цифровые управляющие петли имеют преимущество, заключающееся в том, что сигналы могут быть отфильтрованы в цифровой форме до их поступления в управляющую петлю (обратной связи), что обеспечивает надежную работу даже при наличии сильных шумов. Для этого модуль 13 питания предпочтительно содержит один или несколько аналого-цифровых преобразователей, обеспечивающих (одностороннюю) передачу данных от различных блоков как во входном каскаде (блоки 132-134), так и в выходном каскаде (блоки 136-138) в микроконтроллеры (микроконтроллеры) 231 (и 232). Аналого-цифровые преобразователи и любые возможные цифроаналоговые преобразователи показаны на фиг.2 в виде блоков 236.
Следует отметить, что передача данных из микроконтроллера в блоки входного/выходного каскада обычно представляет собой передачу цифровых данных. Поскольку электронными схемами блоков 133, 134, 136 и/или 137 можно управлять с помощью широтно-импульсной модуляции, сигналы, поступающие от микроконтроллера, в принципе не требуют какого-либо аналогового преобразования. В качестве альтернативы можно предусмотреть цифро-аналоговые преобразователи для двустороннего обмена данными с микроконтроллером 231 (и 232), если потребуют обстоятельства.
Одна такая петля обратной связи с пропорционально-интегрально-дифференциальным (ПИД) регулятором может быть реализована между блоком 134 инвертора мощности и выпрямительным блоком 133. Микроконтроллер 231 может быть запрограммирован для считывания и анализа фактических сигналов от одного из блоков 133 и 134 в цифровой форме для обеспечения необходимого управления. Например, в случае, когда блок 134 инвертора мощности представляет собой цепь резонансного LLC-преобразователя, может быть осуществлено сигнальное соединение с микроконтроллером для передачи фактического напряжения шины резонансного моста в микроконтроллер. Микроконтроллер может быть запрограммирован для сравнения в цифровой форме упомянутого напряжения с заданным напряжением шины. В зависимости от разницы упомянутых величин, для компенсации упомянутой разницы микроконтроллер может быть запрограммирован для определения и/или регулирования схемы (рабочего цикла, частоты) широтно-импульсной модуляции, используемой для выпрямителя 133. В результате, при любых условиях можно получить приемлемый коэффициент мощности. Кроме того, микроконтроллер может быть запрограммирован для управления напряжением шины любой из выходных каскадных цепей (блоков 136, 137 или 138) путем регулирования схемы широтно-импульсной модуляции, подсоединенной к выпрямителю 133.
Микроконтроллер 231 предпочтительно может быть запрограммирован для подачи сигнала широтно-импульсной модуляции на каждую из двух ветвей моста резонансного LLC-преобразователя в блоке 134, причем сигнал может быть различным для каждой из двух ветвей. Это может быть реализовано путем внедрения в микроконтроллере 231 второй петли обратной связи с ПИД-регулятором в дополнение к петле, упомянутой выше. Первую петлю обратной связи с ПИД-регулятором используют для низкой нагрузки, причем она управляет фазовым сдвигом между двумя сигналами широтно-импульсной модуляции, обеспечиваемыми для упомянутых двух ветвей моста 134 резонансного LLC-преобразователя. Для более высокой нагрузки, если при фазовом сдвиге на 180° (т.е. максимальном выходе первой петли обратной связи с ПИД-регулятором) искомого напряжения не достигают, то вступает в действие вторая петля обратной связи с ПИД-регулятором для дополнительного повышения выходного напряжения. Это позволяет сократить частоту сигнала широтно-импульсной модуляции для обеих ветвей до тех пор, пока не будет достигнуто необходимое напряжение шины (считываемое микроконтроллером 231) с сохранением фазового сдвига на 180°.
Для управления напряжением шины любой из выходных каскадных цепей 136-138, в программных средствах, предназначенных для работы в микроконтроллере 231/232, могут быть реализованы дополнительные цифровые петли обратной связи с ПИД-регулятором. Для этого в мостах 136 и/или 137 выходного каскада возможно использование широтно-импульсной модуляции, что хорошо известно из уровня техники. Сигнальное соединение между мостами 136/137 и микроконтроллером 231/232 может быть обеспечено через аналого-цифровые преобразователи, аналогично входному каскаду.
В микроконтроллере предпочтительно можно хранить набор различных сигнальных схем широтно-импульсной модуляции, причем микроконтроллер может применять упомянутые схемы в зависимости от формы выходной волны, от выходного сигнала постоянного тока до высокочастотного выходного сигнала переменного тока.
Согласно настоящему изобретению модули 13 питания предпочтительно сконструированы так, что их можно установить в стандартные монтажные рейки. Кроме того, согласно настоящему изобретению регуляторы постоянного тока с различными номинальными выходами могут быть собраны с использованием монтажной рейки одного и того же размера, просто путем добавления в монтажную рейку одного или нескольких модулей питания. Если ранее производителю для создания регуляторов постоянного тока с различными номинальными выходами требовались различные трансформаторы и различные платы преобразования напряжения, то настоящее изобретение позволяет собирать регуляторы напряжения всех типов на основе одного и того же модуля питания, что существенно сокращает необходимые складские мощности и экономит расходы на изготовление. Кроме того, работа трансформаторов в модуле питания на высоких частотах дополнительно позволяет уменьшить размеры и вес модулей питания, в результате чего предлагаемый в настоящем изобретении регулятор постоянного тока имеет по меньшей мере такие же и предпочтительно меньшие размеры и вес по сравнению с регуляторами постоянного тока, известными из уровня техники.
Модули 13 питания предпочтительно имеют номинальную выходную мощность, меньшую или равную 10 кВА, предпочтительно меньшую или равную 8 кВА, предпочтительно меньшую или равную 6 кВА. Номинальная выходная мощность модулей 13 питания предпочтительно составляет по меньшей мере 1 кВА, предпочтительно по меньшей мере 2 кВА. Приведенные номинальные величины относятся к резистивной нагрузке. Согласно настоящему изобретению регуляторы постоянного тока предпочтительно содержат от одного до десяти модулей питания, предпочтительно от одного до шести.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРЕОБРАЗОВАТЕЛЬ НАПРЯЖЕНИЯ ПОСТОЯННОГО ТОКА С РЕЗЕРВИРУЕМОЙ ПАРАЛЛЕЛЬНОЙ АРХИТЕКТУРОЙ | 2006 |
|
RU2317626C1 |
| Smart-инвертор для поддержания норм качества электрической энергии в распределительных сетях электроснабжения 0,4 кВ их установленным значениям и интеллектуально-автоматизированная система управления электрическими сетями на базе Smart-инвертора | 2024 |
|
RU2835155C1 |
| ДВУХПРОВОДНОЙ ПЕРЕДАТЧИК С ИЗОЛИРОВАННЫМ ВЫХОДОМ CAN | 2005 |
|
RU2338262C2 |
| МОДУЛЬНАЯ СВЕТОДИОДНАЯ СИСТЕМА ОСВЕЩЕНИЯ | 2011 |
|
RU2559819C2 |
| СТАБИЛИЗАТОР ПЕРЕМЕННОГО НАПРЯЖЕНИЯ С ЭЛЕМЕНТАМИ ЗАЩИТЫ И РЕЗЕРВИРОВАНИЯ (ВАРИАНТЫ) | 2008 |
|
RU2377630C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СВЕТОВЫМ МОДУЛЕМ | 2014 |
|
RU2663197C2 |
| Универсальный стабилизатор-регулятор электропитания с функцией энергосбережения | 2021 |
|
RU2771666C1 |
| МОДУЛЬ СВЯЗИ ДРАЙВЕРА СВЕТИЛЬНИКА С ИСПОЛЬЗОВАНИЕМ ПРОТОКОЛА LoRaWAN | 2024 |
|
RU2836440C1 |
| Прибор контроля потребления электрической энергии в сети низкого напряжения | 2020 |
|
RU2748936C1 |
| СВАРОЧНЫЙ АППАРАТ | 2005 |
|
RU2302931C1 |

Изобретение относится к регуляторам постоянного тока, в частности к регуляторам, используемым для подачи электрической энергии в аэродромные световые приборы. Техническим результатом является повышение надежности и увеличение КПД регулятора постоянного тока. Результат достигается тем, что регулятор (10) постоянного тока предназначен для подачи в схему (9) последовательного соединения аэродромной осветительной установки выходной электрической мощности переменного тока, соответствующей предварительно заданной выходной мощности, причем упомянутый регулятор содержит множество модулей (13), выполненных с возможностью электрического соединения для одновременной работы с совместным обеспечением упомянутой выходной мощности, причем каждый из модулей выполнен с возможностью обеспечения выходной мощности модуля, вносящей вклад в выходную мощность регулятора. При этом каждый модуль содержит свой соответствующий трансформатор (135) с возможностью обеспечения гальванической изоляции согласно местным стандартам и микроконтроллер с возможностью управления работой модуля. Упомянутый регулятор постоянного тока содержит сеть (17) передачи данных, выполненную с возможностью подсоединения к упомянутым микроконтроллерам модулей (13), причем упомянутые микроконтроллеры выполнены с возможностью обмена данными по упомянутой сети (17) передачи данных так, чтобы обеспечить модульность упомянутого регулятора (10) постоянного тока, что означает возможность добавления или удаления одного или нескольких таких модулей (13) в или из упомянутого регулятора постоянного тока. 2 н. и 18 з.п. ф-лы, 4 ил.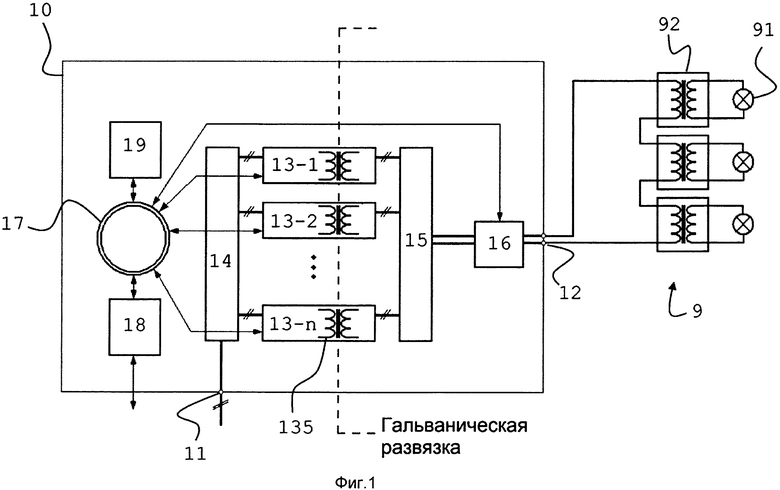
1. Регулятор (10) постоянного тока, предназначенный для подачи в схему (9) последовательного соединения аэродромной осветительной установки выходной электрической мощности переменного тока, соответствующей предварительно заданной выходной мощности, содержащий множество модулей (13), выполненных с возможностью электрического соединения для одновременной работы с совместным обеспечением упомянутой выходной мощности, причем каждый из модулей выполнен с возможностью обеспечения выходной мощности модуля, вносящей вклад в выходную мощность упомянутого регулятора, отличающийся тем, что каждый модуль содержит свой соответствующий трансформатор (135), предназначенный для обеспечения гальванической изоляции согласно местным стандартам, и микроконтроллер (231), предназначенный для управления работой модуля, причем упомянутый регулятор постоянного тока содержит сеть (17) передачи данных, выполненную с возможностью подсоединения к упомянутым микроконтроллерам (231) модулей (13), причем упомянутые микроконтроллеры (231) выполнены с возможность обмена данными по упомянутой сети (17) передачи данных так, чтобы обеспечить модульность упомянутого регулятора (10) постоянного тока, что означает возможность добавления или удаления одного или нескольких таких модулей (13) в или из упомянутого регулятора постоянного тока.
2. Регулятор (10) постоянного тока по п. 1, в котором каждый трансформатор (135) имеет первичную обмотку (235) и вторичную обмотку (335), причем каждый модуль (13) содержит:
входную каскадную цепь (132-134), выполненную с возможностью соединения с линией подачи питания и соединения с упомянутой первичной обмоткой (235) трансформатора (135), причем упомянутая входная каскадная цепь выполнена с возможностью подачи в упомянутую первичную обмотку трансформатора напряжения переменного тока с частотой, превышающей или равной 1 кГц, предпочтительно превышающей или равной 10 кГц, предпочтительно превышающей или равной 20 кГц, и
выходную каскадную цепь (136-138), соединенную с упомянутой вторичной обмоткой (335) трансформатора (135) и выполненную с возможностью обеспечения выходной мощности модуля.
3. Регулятор (10) постоянного тока по п. 2, в котором упомянутая выходная каскадная цепь содержит инвертор (137) мощности, выполненный с возможность переключения на частоте, по меньшей мере в 10 кГц, предпочтительно по меньшей мере в 20 кГц.
4. Регулятор постоянного тока по п. 2 или 3, в котором каждый модуль (13) содержит один или несколько аналого-цифровых преобразователей (236), а также имеет одно или несколько сигнальных соединений между микроконтроллером (231) и одной или несколькими входными каскадными цепями через упомянутый один или несколько аналого-цифровых преобразователей, причем упомянутые микроконтроллеры выполнены с возможность управления работой упомянутой одной или нескольких входных каскадных цепей на основании сигналов, полученных через упомянутое одно или несколько сигнальных соединений.
5. Регулятор (10) постоянного тока по любому из пп. 1-3, в котором каждый модуль содержит средство получения информации о фазе, относящейся к входу (131) мощности модуля, причем каждый модуль выполнен с возможностью синхронизации выхода (139) мощности модуля на основании полученной информации о фазе.
6. Регулятор (10) постоянного тока по любому из пп. 1-3, содержащий средство (16) получения информации о фазе, относящейся к выходу (12) мощности упомянутого регулятора, и передачи в модуль (13) полученной информации о фазе выхода мощности регулятора, причем каждый модуль выполнен с возможностью синхронизации выхода (139) мощности модуля на основании полученной информации о фазе выхода мощности регулятора.
7. Регулятор (10) постоянного тока по любому из пп. 1-3, причем модули (13) имеют одинаковые номинальные максимальные выходные мощности.
8. Регулятор (10) постоянного тока по любому из пп. 1-3, причем упомянутые микроконтроллеры (231) и упомянутая сеть (17) передачи данных выполнены с возможностью реализации протокола передачи данных, обеспечивающего автоматическое изменение конфигурации упомянутого регулятора постоянного тока при добавлении или удалении модулей (13).
9. Регулятор (10) постоянного тока по п. 8, в котором упомянутый протокол передачи данных выполнен с возможностью назначения каждому модулю адреса для передачи данных по упомянутой сети (17) передачи данных.
10. Регулятор постоянного тока по п. 8, в котором упомянутый протокол передачи данных выполнен с возможностью реализации протокола передачи данных, построенного по принципу «главный-подчиненный», причем один модуль действует в качестве главного модуля для передачи данных по сети (17), причем обеспечена возможность автоматической смены главного модуля.
11. Регулятор постоянного тока по п. 9, в котором упомянутый протокол передачи данных выполнен с возможностью реализации протокола передачи данных, построенного по принципу «главный-подчиненный», причем один модуль действует в качестве главного модуля для передачи данных по сети (17), обеспечена возможность автоматической смены главного модуля, и при этом упомянутый протокол передачи данных выполнен с возможностью выбора главного модуля на основании назначенного адреса.
12. Регулятор постоянного тока по п. 9 или 11, в котором адрес, назначаемый каждому модулю, является фиксированным адресом, предпочтительно адресом, реализованным аппаратными средствами.
13. Регулятор (10) постоянного тока по любому из пп. 1-3, 9, 10, 11, в котором упомянутая сеть (17) передачи данных выполнена с возможностью передачи данных между упомянутыми модулями на основании совместно используемой структуры данных.
14. Регулятор (10) постоянного тока по п. 8, в котором упомянутые модули (13) выполнены с возможностью передачи данных между модулями по сети (17) передачи данных на основании протокола передачи данных без главного, причем каждый модуль выполнен с возможностью определения его соответствующего вклада в выходную мощность регулятора на основании передаваемых данных.
15. Регулятор (10) постоянного тока по любому из пп. 1-3, 9, 10, 11, 14, содержащий интерфейс (18) дистанционного управления, предназначенный для подсоединения к упомянутой сети (17) передачи данных и выполненный с возможностью установления удаленного соединения для установки предварительно заданной выходной мощности.
16. Регулятор (10) постоянного тока по любому из пп. 1-3, 9, 10, 11, 14, содержащий выходной измерительный блок (16), предназначенный для подсоединения к выходной стороне (12) упомянутого регулятора (10) и выполненный с возможностью измерения одного или нескольких выходных параметров регулятора, например информации о фазе сигнала, и с возможностью передачи упомянутого одного или нескольких параметров в качестве обратной связи в упомянутые модули (13).
17. Регулятор (10) постоянного тока по п. 16, в котором предусмотрена возможность передачи упомянутого одного или нескольких выходных параметров упомянутого измерительного модуля в качестве обратной связи по сети (17) передачи данных.
18. Регулятор (10) постоянного тока по любому из пп. 1-3, 9, 10, 11, 14, 17, в котором выходы мощности по меньшей мере двух модулей (13) соединены последовательно.
19. Регулятор (10) постоянного тока по любому из пп. 1-3, 9, 10, 11, 14, 17, в котором выходы мощности по меньшей мере двух модулей (13) соединены параллельно.
20. Модуль (13), предназначенный для использования в регуляторе (10) постоянного тока по любому из пп. 1-19, содержащий порт (233) передачи данных, соединенный с микроконтроллером (231), причем в упомянутом микроконтроллере (231) реализован протокол передачи данных, запрограммированный для обмена данными через упомянутый порт передачи данных по меньшей мере с одним другим модулем для определения выходной мощности модуля.
| US 6300878 B1, 2001.10.09 | |||
| US 5485151 A, 1996.01.16 | |||
| US 5926115 A, 1999.07.20 | |||
| РАЗБОРНЫЙ СКВАЖИННЫЙ ФИЛЬТР | 2007 |
|
RU2348795C1 |
| WO 2005015957 A2, 2005.02.17 | |||
| Устройство для дифференциальной защиты силовой цепи электровозов постоянного тока | 1951 |
|
SU95446A1 |
| ПНЕВМАТИЧЕСКАЯ СХЕМА ТОРМОЗНОГО ПРИВОДА | 2000 |
|
RU2194638C2 |

