Перекрестная ссылка на родственную заявку
[0001] По настоящей заявке испрашивается приоритет на основании заявки на патент Китая №201410290133.7, поданной 25 июня 2014 г., озаглавленной "CT SYSTEM FOR SECURITY CHECK AND METHOD THEREOF", которая полностью включена в настоящий документ путем ссылки.
Область техники, к которой относится изобретение
[0002] Настоящее изобретение относится к досмотру, и в частности, к системе компьютерной томографии (КТ) для досмотра и к соответствующему способу.
Уровень техники
[0003] Мультиэнергетические рентгеновские системы досмотра принадлежат к новому типу систем досмотра, разработанному на основе моноэнергетических рентгеновских систем досмотра. Мультиэнергетическая рентгеновская система досмотра может обеспечивать не только форму и содержимое обследуемого предмета, но также информацию, отражающую эквивалентное атомное число обследуемого предмета, чтобы идентифицировать, является ли обследуемый предмет органическим веществом или неорганическим веществом, и отобразить обследуемый предмет различными цветами на цветном мониторе для удобства распознавания оператором.
[0004] В области досмотра важной потребностью является проекция изображения опасного предмета (TIP). Так называемая TIP относится к тем изображениям опасных предметов, которые накапливаются заранее, вставляются в изображение, например, багажа или посылки, то есть вставляются фиктивные изображения опасных предметов (FTI). Это играет важную роль в обучении инспекторов по досмотру и оценке эффективности работы этих инспекторов. В отношении двумерных (2D) TIP для рентгеновских систем досмотра имеются отработанные решения и ряд применений. Однако в отношении трехмерных (3D) TIP для досмотра с помощью КТ в настоящее время не существует производителя, который обеспечил бы такие функциональные возможности.
Раскрытие изобретения
[0005] Учитывая одну или более технических проблем в уровне техники, настоящее изобретение предусматривает систему КТ для досмотра и соответствующий способ, с помощью которых пользователь может быстро отмечать подозрительный предмет на КТ-изображении и обеспечивать обратную связь в отношении того, включено ли FTI-изображение.
[0006] В соответствии с аспектом настоящего изобретения предложен способ досмотра в системе компьютерной томографии (КТ), содержащий этапы: считывания данных обследования для обследуемого предмета; вставки по меньшей мере одного трехмерного (3D) фиктивного изображения опасного предмета (FTI) в 3D-изображение обследования для обследуемого предмета, причем 3D-изображение обследования получают из данных обследования; приема выбора по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на двумерном (2D) изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, причем 2D-изображение обследования получают из 3D-изображения обследования или получают из данных обследования; и выдачи в ответ на упомянутый выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI.
[0007] В соответствии с некоторыми вариантами осуществления этап приема выбора по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на 2D-изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, содержит: прием координат части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором.
[0008] В соответствии с некоторыми вариантами осуществления этап выдачи в ответ на выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит по меньшей мере одно из: оценивания, включает ли по меньшей мере одна выбранная область по меньшей мере одно 3D FTI; отображения диалога для подтверждения, что 3D-изображение обследования включает в себя по меньшей мере одно 3D FTI; выдачи текстового указания в интерфейсе для подтверждения, что 3D-изображение обследования включает в себя по меньшей мере одно 3D FTI; выделения части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором; отметки части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором; и заполнения части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором, конкретным цветом или узором.
[0009] В соответствии с некоторыми вариантами осуществления вычисляется по меньшей мере один параметр пространственной характеристики обследуемого предмета в соответствии с данными обследования, и по меньшей мере одно 3D FTI вставляется в 3D-изображение обследования для обследуемого предмета на основании параметра пространственной характеристики.
[0010] В соответствии с некоторыми вариантами осуществления параметр пространственной характеристики относится по меньшей мере к одному из положения, размера и ориентации вставляемого 3D FTI.
[0011] В соответствии с некоторыми вариантами осуществления выбор по меньшей мере одной области содержит выбор части отображенного 3D-изображения обследования под некоторым углом обзора.
[0012] В соответствии с некоторыми вариантами осуществления при 3D-визуализации 3D-изображения обследования записывается информация об облаке точек, характеризующая обследуемый предмет, и этап выдачи в ответ на выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит: получение последовательности кластеров информации об облаке точек различных предметов в обследуемом предмете путем разделения; определение по меньшей мере одной выбранной области из последовательности кластеров информации об облаке точек разных предметов на основании заданного критерия; и оценивание, включает ли по меньшей мере одна выбранная область по меньшей мере одно 3D FTI.
[0013] В соответствии с некоторыми вариантами осуществления выбор по меньшей мере одной области содержит выбор части отображенного 3D-изображения обследования под множеством углов обзора.
[0014] В соответствии с некоторыми вариантами осуществления выбор по меньшей мере одной области содержит выбор части отображенного 3D-изображения обследования под двумя разными углами обзора, причем два разных угла обзора по существу ортогональны друг другу, прозрачные области удаляются из данных обследования, чтобы получить иерархический ограничивающий прямоугольник из непрозрачных областей в данных обследования, а затем визуализируется глубина сцены для иерархического ограничивающего прямоугольника, чтобы получить карту глубин на передней стороне и карту глубин на задней стороне, и этап выдачи в ответ на выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит: выполнение поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне в соответствии с выбранной пользователем областью под первым углом обзора, чтобы сформировать первый ограничивающий прямоугольник; выполнение отслеживания лучей при сформированном первом ограничивающем прямоугольнике в качестве носителя текстуры; выполнение поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне в соответствии с выбранной пользователем областью под вторым углом обзора, по существу ортогональным первому углу обзора, чтобы сформировать второй ограничивающий прямоугольник; выполнение операции булева пересечения над первым ограничивающим прямоугольником и вторым ограничивающим прямоугольником в пространстве изображений, чтобы получить отмеченную область в 3D-пространстве в качестве по меньшей мере одной выбранной области; и оценивание, включает ли по меньшей мере одна выбранная область по меньшей мере одно 3D FTI.
[0015] В соответствии с некоторыми вариантами осуществления этап вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета содержит: разделение 3D-изображения обследования, чтобы получить множество фрагментов 3D-изображения обследуемого предмета; вычисление расстояний между множеством фрагментов 3D-изображения и их положений; и вставку 3D FTI на основании вычисленных расстояний и положений.
[0016] В соответствии с некоторыми вариантами осуществления этап вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета содержит: определение прозрачных частей и непрозрачных частей в данных объема обследуемого предмета на основании значений непрозрачности вокселов; определение положений и размеров границ обследуемого предмета из непрозрачных частей в данных объема; определение возможных положений вставки в прозрачные области в диапазоне границ; и выбор по меньшей мере одного положения из возможных положений вставки в соответствии с заданным критерием, чтобы вставить по меньшей мере одно 3D FTI по меньшей мере в одно выбранное положение.
[0017] В соответствии с некоторыми вариантами осуществления этап вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета содержит: удаление фонового изображения из 2D-изображения обследования, чтобы получить основное 2D-изображение; определение 2D-положения вставки 2D FTI в основное 2D-изображение; определение положения 3D FTI на 3D-изображении обследования в направлении глубины в 2D-положении вставки; и вставку по меньшей мере одного 3D FTI в определенное положение.
[0018] В соответствии с некоторыми вариантами осуществления способ дополнительно содержит: вставку 2D FTI, соответствующего по меньшей мере одному 3D FTI, в 2D-изображение обследования для обследуемого предмета.
[0019] В соответствии с дополнительным аспектом настоящего изобретения предложена система компьютерной томографии (КТ) для досмотра, содержащая: устройство КТ-сканирования, выполненное с возможностью получения данных обследования для обследуемого предмета; запоминающее устройство, выполненное с возможностью хранения данных обследования; устройство отображения, выполненное с возможностью отображения трехмерного (3D) изображения обследования и/или двумерного (2D) изображения обследования для обследуемого предмета, причем 3D-изображение обследования получают из данных обследования, а 2D-изображение обследования получают из 3D-изображения обследования или данных обследования; устройство обработки данных, выполненное с возможностью вставки по меньшей мере одного фиктивного 3D-изображения опасного предмета (FTI) в 3D-изображение обследования для обследуемого предмета; и устройство ввода, выполненное с возможностью приема выбора по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на 2D-изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, причем устройство обработки данных дополнительно выполнено с возможностью выдачи в ответ на выбор, обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI.
[0020] В соответствии с некоторыми вариантами осуществления устройство обработки данных дополнительно выполнено с возможностью вычисления по меньшей мере одного параметра пространственной характеристики обследуемого предмета в соответствии с данными обследования и для вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета на основании параметра пространственной характеристики.
[0021] В соответствии с некоторыми вариантами осуществления параметр пространственной характеристики относится по меньшей мере к одному из положения, размера и ориентации вставляемого 3D FTI.
[0022] В соответствии с дополнительным аспектом настоящего изобретения предложен способ отметки подозрительного предмета в системе КТ для досмотра, содержащий этапы: удаления прозрачных областей из данных КТ, полученных системой КТ для досмотра, чтобы получить иерархический ограничивающий прямоугольник из непрозрачных областей в данных КТ; визуализации глубины сцены для иерархического ограничивающего прямоугольника, чтобы получить карту глубин на передней стороне и карту глубин на задней стороне; выполнения поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне, используя сделанные пользователем отметки, в направлении линии визирования, чтобы сформировать первый ограничивающий прямоугольник; выполнения отслеживания лучей при сформированном первом ограничивающем прямоугольнике в качестве носителя текстуры; выполнения поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне, используя сделанные пользователем отметки, в направлении, ортогональном направлению линии визирования, чтобы сформировать второй ограничивающий прямоугольник; выполнения операции булева пересечения над первым ограничивающим прямоугольником и вторым ограничивающим прямоугольником в пространстве изображений, чтобы получить отмеченную область в 3D-пространстве; и отображения отмеченной области в 3D-пространстве совместно с данными КТ.
[0023] В соответствии с некоторыми вариантами осуществления этап удаления прозрачных областей содержит: создание выборки данных КТ в направлении линии визирования; выполнение интегрирования объемной визуализации над сегментом между каждыми двумя выборочными точками, используя таблицу поиска для предварительного интегрирования на основании непрозрачности, чтобы получить непрозрачность, соответствующую тому сегменту; и удаление прозрачных областей путем подразделения, используя алгоритм кодирования октодерева, чтобы получить иерархический ограничивающий прямоугольник, соответствующий непрозрачным областям данных.
[0024] В соответствии с некоторыми вариантами осуществления этап визуализации глубины сцены содержит: удаление сечения с относительно большим значением глубины, чтобы получить карту глубин на передней стороне; и удаление сечения с относительно малым значением глубины, чтобы получить карту глубин на задней стороне.
[0025] В соответствии с некоторыми вариантами осуществления первый ограничивающий прямоугольник и второй ограничивающий прямоугольник являются ограничивающими прямоугольниками в любом направлении.
[0026] В соответствии с некоторыми вариантами осуществления отмеченная область в 3D-пространстве отображается совместно с данными КТ, используя основанную на ограниченности пространства функцию преобразования.
[0027] В соответствии с дополнительным аспектом настоящего изобретения предложено устройство для отметки подозрительного предмета в системе КТ для досмотра, содержащее: средство для удаления прозрачных областей из данных КТ, полученных системой КТ для досмотра, чтобы получить иерархический ограничивающий прямоугольник из непрозрачных областей в данных КТ; средство для визуализации глубины сцены для иерархического ограничивающего прямоугольника, чтобы получить карту глубин на передней стороне и карту глубин на задней стороне; средство для выполнения поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне, используя сделанные пользователем отметки, в направлении линии визирования, чтобы сформировать первый ограничивающий прямоугольник; средство для выполнения отслеживания лучей при сформированном первом ограничивающем прямоугольнике в качестве носителя текстуры; средство для выполнения поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне, используя сделанные пользователем отметки, в направлении, ортогональном направлению линии визирования, чтобы сформировать второй ограничивающий прямоугольник; средство для выполнения операции булева пересечения над первым ограничивающим прямоугольником и вторым ограничивающим прямоугольником в пространстве изображений, чтобы получить отмеченную область в 3D-пространстве; и средство для отображения отмеченной области в 3D-пространстве совместно с данными КТ.
[0028] В соответствии с некоторыми вариантами осуществления средство для удаления прозрачных областей содержит: средство для создания выборки данных КТ в направлении линии визирования; средство для выполнения интегрирования объемной визуализации над сегментом между каждыми двумя выборочными точками, используя способ с таблицей поиска, чтобы получить непрозрачность, соответствующую тому сегменту; и средство для удаления прозрачных областей путем подразделения, используя алгоритм кодирования октодерева, чтобы получить иерархический ограничивающий прямоугольник.
[0029] В соответствии с некоторыми вариантами осуществления средство для визуализации глубины сцены содержит: средство для удаления сечения с относительно большим значением глубины, чтобы получить карту глубин на передней стороне; и средство для удаления сечения с относительно малым значением глубины, чтобы получить карту глубин на задней стороне.
[0030] С помощью вышеприведенного технического решения пользователю удобно быстро отмечать подозрительный предмет на КТ-изображении, и выдается обратная связь о том, присутствует ли FTI.
Краткое описание чертежей
[0031] Для лучшего понимания настоящего изобретения настоящее изобретение будет подробно описано в соответствии с прилагаемыми чертежами, на которых:
[0032] Фиг. 1 - структурная схема, иллюстрирующая систему КТ для досмотра в соответствии с вариантом осуществления настоящего изобретения;
[0033] Фиг. 2 - структурная блок-схема, иллюстрирующая компьютерное устройство обработки данных, показанное на фиг. 1;
[0034] Фиг. 3 - структурная блок-схема, иллюстрирующая контроллер в соответствии с вариантом осуществления настоящего изобретения;
[0035] Фиг. 4A - блок-схема алгоритма, иллюстрирующая способ в системе досмотра в соответствии с вариантом осуществления настоящего изобретения;
[0036] Фиг. 4B - блок-схема алгоритма, иллюстрирующая способ для отметки подозрительного предмета в системе КТ в соответствии с вариантом осуществления настоящего изобретения;
[0037] Фиг. 5 - схематическое представление, иллюстрирующее алгоритм подразделения октодерева;
[0038] Фиг. 6 - схема, иллюстрирующая иерархический ограничивающий прямоугольник, полученный с использованием алгоритма подразделения октодерева в соответствии с вариантом осуществления настоящего изобретения;
[0039] Фиг. 7 - схема, иллюстрирующая карту глубин на передней стороне в соответствии с вариантом осуществления настоящего изобретения;
[0040] Фиг. 8 - схема, иллюстрирующая карту глубин на задней стороне в соответствии с вариантом осуществления настоящего изобретения;
[0041] Фиг. 9 - схема, иллюстрирующая процесс отслеживания лучей в соответствии с вариантом осуществления настоящего изобретения;
[0042] Фиг. 10 - схема, иллюстрирующая сделанные пользователем отметки в соответствии с вариантом осуществления настоящего изобретения;
[0043] Фиг. 11 - схема, иллюстрирующая процесс поиска на передней стороне и задней стороне с использованием отметок от пользователя;
[0044] Фиг. 12 - схема, иллюстрирующая результат, полученный в результате поиска на передней стороне и задней стороне в соответствии с вариантом осуществления настоящего изобретения;
[0045] Фиг. 13 - схема, иллюстрирующая ориентированный ограничивающий прямоугольник (OBB) со столбцами из отмеченных точек в соответствии с вариантом осуществления настоящего изобретения;
[0046] Фиг. 14 - схема, иллюстрирующая новый диапазон отслеживания лучей, обновленный на основании предыдущего результата отметки;
[0047] Фиг. 15 - схема, иллюстрирующая результат от нанесения отметок во второй раз в ортогональном направлении в соответствии с вариантом осуществления настоящего изобретения;
[0048] Фиг. 16 иллюстрирует результат, полученный в результате поиска на передней стороне и задней стороне с использованием отметок, сделанных во второй раз, в соответствии с вариантом осуществления настоящего изобретения;
[0049] Фиг. 17 - схема, иллюстрирующая ограничивающий прямоугольник OBB со столбцами из отмеченных точек в соответствии с вариантом осуществления настоящего изобретения;
[0050] Фиг. 18 - схема, иллюстрирующая процесс выполнения операции булева пересечения над двумя предметами в пространстве изображений в соответствии с вариантом осуществления настоящего изобретения;
[0051] Фиг. 19 - схема, иллюстрирующая полученную в конечном счете отмеченную 3D-область подозрительного предмета в соответствии с вариантом осуществления настоящего изобретения; и
[0052] Фиг. 20 - схема, иллюстрирующая отображение отмеченного подозрительного предмета совместно с исходными данными в соответствии с вариантом осуществления настоящего изобретения.
Осуществление изобретения
[0053] Ниже будут подробно описываться конкретные варианты осуществления настоящего изобретения. Следует отметить, что описанные в этом документе варианты осуществления приведены только для иллюстрации, не ограничивая настоящее изобретение. Ниже в описании объясняется некоторое количество характерных подробностей для обеспечения лучшего понимания настоящего изобретения. Однако специалистам в данной области техники очевидно, что настоящее изобретение можно реализовать без этих характерных подробностей. В иных случаях известные структуры, материалы или способы не описаны подробно, чтобы не затруднять понимание идеи настоящего изобретения.
[0054] По всему описанию изобретения упоминание понятий «один вариант осуществления», «вариант осуществления», «один пример» или «пример» означает, что конкретные признаки, структуры или свойства, описанные в сочетании с тем вариантом осуществления или примером, включены по меньшей мере в один вариант осуществления настоящего изобретения. Поэтому фраза «в одном варианте осуществления», «в варианте осуществления», «в одном примере» или «в примере» в различных местах по всему описанию изобретения не обязательно может относиться к одному и тому же варианту осуществления или примеру. Кроме того, конкретные признаки, структуры или свойства можно воплотить в одном или более вариантах осуществления или примерах в любой подходящей комбинации и/или подкомбинации. Кроме того, специалистам в данной области техники следует понимать, что используемый в этом документе термин «и/или» означает любую и все комбинации одного или более перечисленных элементов.
[0055] Что касается невозможности быстрой вставки 3D FTI в уровне техники, в соответствии с вариантами осуществления настоящего изобретения считываются данные обследования для обследуемого предмета. По меньшей мере одно 3D FTI вставляется в 3D-изображение обследования для обследуемого предмета, причем 3D-изображение обследования получают из данных обследования. Принимается выбор по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на 2D-изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, причем 2D-изображение обследования получают из 3D-изображения обследования или получают из данных обследования. В ответ на выбор выдается обратная связь о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI. С помощью вышеприведенного решения пользователю удобно быстро отмечать подозрительный предмет на КТ-изображении, и выдается обратная связь о том, присутствует ли FTI.
[0056] Фиг. 1 - структурная схема, иллюстрирующая систему КТ в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 1, устройство КТ в соответствии с настоящим вариантом осуществления содержит раму 20, перемещающий элемент 40, контроллер 50, компьютерное устройство 60 обработки данных или т.п. Рама 20 содержит источник 10 излучения для излучения рентгеновских лучей для обследования, например рентгеновский излучатель, и устройство 30 обнаружения и сбора. Перемещающий элемент 40 перемещает обследуемый багаж 70 для прохождения через область сканирования между источником 10 излучения и устройством 30 обнаружения и сбора в раме 20, в то время как рама 20 вращается вокруг направления движения обследуемого багажа 70. Таким образом, луч, излученный из источника 10 излучения, может проходить через обследуемый багаж 70, чтобы реализовать КТ-сканирование обследуемого багажа 70.
[0057] Устройство 30 обнаружения и сбора является, например, составным модулем со встроенными в него детектором и блоком сбора данных, например плоским детектором, для обнаружения лучей, проходящих через обследуемый предмет, чтобы получить аналоговый сигнал, и преобразования аналогового сигнала в цифровой сигнал, чтобы вывести данные проекции обследуемого багажа 70 относительно рентгеновских лучей. Контроллер 50 выполнен с возможностью управления различными частями всей системы для совместной работы. Компьютерное устройство 60 обработки данных выполнено с возможностью обработки данных, собранных блоком сбора данных, восстановления данных и вывода результата.
[0058] Как показано на фиг. 1, источник 10 излучения размещается на одной стороне обследуемого предмета, а устройство 30 обнаружения и сбора (включающее в себя детектор и блок сбора данных) размещается на другой стороне обследуемого багажа 70, чтобы получить многораскурсные данные проекции обследуемого багажа 70. Блок сбора данных содержит схему усиления и формирования данных, которая может работать в режиме интегратора электрического тока или в режиме счета импульсов. Устройство 30 обнаружения и сбора имеет кабель вывода данных, соединенный с контроллером 50 и компьютерным устройством 60 обработки данных, для сохранения собранных данных в компьютерном устройстве 60 обработки данных в соответствии с запускающей командой.
[0059] Фиг. 2 - структурная блок-схема, иллюстрирующая компьютерное устройство 60 обработки данных, показанное на фиг. 1. Как показано на фиг. 2, данные, собранные блоком сбора данных, сохраняются в запоминающем устройстве 61 посредством интерфейсного блока 68 и шины 64. В постоянном запоминающем устройстве 62 (ROM) хранится конфигурационная информация и программы компьютерного устройства обработки данных. Оперативное запоминающее устройство 63 (RAM) выполнено с возможностью временного хранения различных данных во время работы процессора 66. К тому же в запоминающем устройстве 61 также хранится компьютерная программа для обработки данных. Внутренняя шина 64 выполнена с возможностью соединения запоминающего устройства 61, ROM 62, RAM 63, устройства 65 ввода, процессора 66, устройства 67 отображения и интерфейсного блока 68, которые описаны выше.
[0060] После того, как пользователь вводит команду операции посредством устройства 65 ввода, например клавиатуры, мыши или т.п., коды команд в компьютерной программе управляют процессором 66 для исполнения заданного алгоритма обработки данных, а после получения результата обработки данных - для отображения результата на устройстве 67 отображения, например жидкокристаллическом (LCD) дисплее или т.п., или вывода результата обработки сразу в твердой копии, например распечатке.
[0061] Фиг. 3 - структурная блок-схема, показывающая контроллер в соответствии с вариантом осуществления настоящего изобретения. Как показано на фиг. 3, контроллер 50 содержит блок 51 управления, выполненный с возможностью управления источником 10 излучения, перемещающим элементом 40 и устройством 30 обнаружения и сбора в соответствии с командами от компьютера 60; блок 52 формирования запускающего сигнала, выполненный с возможностью формирования запускающей команды для запуска источника 10 излучения, устройства 30 обнаружения и сбора и перемещающего элемента 40 для работы под управлением блока управления; первое приводное устройство 53, выполненное с возможностью приведения в действие перемещающего элемента 40, чтобы перемещать обследуемый багаж 70 в соответствии с запускающей командой, сформированной блоком 52 формирования триггерного сигнала под управлением блока 51 управления; и второе приводное устройство 54, выполненное с возможностью приведения в действие рамы 20, чтобы вращаться в соответствии с запускающей командой, сформированной блоком 52 формирования триггерного сигнала под управлением блока 51 управления. Данные проекции, полученные устройством 30 обнаружения и сбора, сохраняются в компьютере 60 для восстановления томографических изображений, чтобы получить данные томографических изображений обследуемого багажа 70. Затем компьютер 60 получает DR-изображение обследуемого багажа 70 по меньшей мере под неким углом обзора из данных томографических изображений путем исполнения программного обеспечения и отображает DR-изображение вместе с восстановленным трехмерным изображением для удобства досмотра с помощью устройства распознавания изображений. В соответствии с другими вариантами осуществления вышеупомянутая система КТ-визуализации может быть системой двухэнергетической КТ, то есть источник 10 рентгеновского излучения в раме 20 может излучать два типа лучей, то есть жесткое излучение и мягкое излучение. После того, как устройство 30 обнаружения и сбора обнаруживает данные проекции на разных энергетических уровнях, компьютерное устройство 60 обработки данных реализует восстановление двухэнергетической КТ, чтобы получить эквивалентные атомные числа и данные о концентрации электронов у различных томографических изображений обследуемого багажа 70.
[0062] Фиг. 4A - блок-схема алгоритма, иллюстрирующая способ в системе досмотра в соответствии с вариантом осуществления настоящего изобретения.
[0063] Как показано на фиг. 4A, на этапе S401 считываются данные обследования для обследуемого предмета.
[0064] На этапе S402 по меньшей мере одно 3D FTI вставляется в 3D-изображение обследования для обследуемого предмета, причем 3D-изображение обследования получают из данных обследования. Например, устройство обработки данных выбирает одно или более 3D-изображений из базы данных FTI и вставляет одно или более 3D-изображений в 3D-изображение обследования для обследуемого предмета.
[0065] На этапе S403 принимается выбор по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на 2D-изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, причем 2D-изображение обследования получают из 3D-изображения обследования или получают из данных обследования. Например, пользователь задействует устройство ввода для активации кнопки-флажка, чтобы выбрать некоторую область, или рисует окружность, чтобы она включала в себя некоторую область на изображении, отображенном на экране.
[0066] На этапе S404 в ответ на выбор выдается обратная связь о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI.
[0067] В некоторых вариантах осуществления этап приема выбора по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на 2D-изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, содержит: прием координат части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором.
[0068] В некоторых вариантах осуществления этап выдачи в ответ на выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит по меньшей мере одно из:
- оценивания, включает ли по меньшей мере одна выбранная область по меньшей мере одно 3D FTI;
- отображения диалога для подтверждения, что 3D-изображение обследования включает в себя по меньшей мере одно 3D FTI;
- выдачи текстового указания в интерфейсе для подтверждения, что 3D-изображение обследования включает в себя по меньшей мере одно 3D FTI;
- выделения части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором;
- отметки части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором; и
- заполнения части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с выбором, конкретным цветом или узором.
[0069] Например, вычисляется по меньшей мере один параметр пространственной характеристики обследуемого предмета в соответствии с данными обследования, и по меньшей мере одно 3D FTI вставляется в 3D-изображение обследования для обследуемого предмета на основании параметра пространственной характеристики. В некоторых вариантах осуществления параметр пространственной характеристики относится по меньшей мере к одному из положения, размера и ориентации вставляемого 3D FTI. К тому же выбор по меньшей мере одной области содержит выбор части отображенного 3D-изображения обследования под некоторым углом обзора. Например, при 3D-визуализации 3D-изображения обследования записывается информация об облаке точек, характеризующая обследуемый предмет, и этап выдачи в ответ на выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит: получение последовательности кластеров информации об облаке точек разных предметов в обследуемом предмете путем разделения; определение по меньшей мере одной выбранной области из последовательности кластеров информации об облаке точек разных предметов на основании заданного критерия; и оценивание, включает ли по меньшей мере одна выбранная область по меньшей мере одно 3D FTI.
[0070] В других вариантах осуществления выбор по меньшей мере одной области содержит выбор части отображенного 3D-изображения обследования под множеством углами обзора. Например, выбор по меньшей мере одной области содержит выбор части отображенного 3D-изображения обследования под двумя разными углами обзора, причем два разных угла обзора по существу ортогональны друг другу. Здесь прозрачные области удаляются из данных обследования, чтобы получить иерархический ограничивающий прямоугольник из непрозрачных областей в данных обследования, а затем визуализируется глубина сцены для иерархического ограничивающего прямоугольника, чтобы получить карту глубин на передней стороне и карту глубин на задней стороне. Этап выдачи в ответ на выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит: выполнение поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне в соответствии с выбранной пользователем областью под первым углом обзора, чтобы сформировать первый ограничивающий прямоугольник; выполнение отслеживания лучей при сформированном первом ограничивающем прямоугольнике в качестве носителя текстуры; выполнение поиска соответственно на карте глубин на передней стороне и карте глубин на задней стороне в соответствии с выбранной пользователем областью под вторым углом обзора, по существу ортогональным первому углу обзора, чтобы сформировать второй ограничивающий прямоугольник; выполнение операции булева пересечения над первым ограничивающим прямоугольником и вторым ограничивающим прямоугольником в пространстве изображений, чтобы получить отмеченную область в 3D-пространстве в качестве по меньшей мере одной выбранной области; и оценивание, включает ли по меньшей мере одна выбранная область по меньшей мере одно 3D FTI.
[0071] В некоторых вариантах осуществления этап вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета содержит: разделение 3D-изображения обследования, чтобы получить множество фрагментов 3D-изображения обследуемого предмета; вычисление расстояний между множеством фрагментов 3D-изображения и их положений; и вставку 3D FTI на основании вычисленных расстояний и положений.
[0072] В других вариантах осуществления этап вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета содержит: определение прозрачных частей и непрозрачных частей в данных объема обследуемого предмета на основании значений непрозрачности вокселов; определение положений и размеров границ обследуемого предмета из непрозрачных частей в данных объема; определение возможных положений вставки в прозрачные области в диапазоне границ; и выбор по меньшей мере одного положения из возможных положений вставки в качестве по меньшей мере одной выбранной области в соответствии с заданным критерием; и оценивание, включает ли по меньшей мере одна выбранная область по меньшей мере одно 3D FTI.
[0073] В других вариантах осуществления этап вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета содержит: удаление фонового изображения из 2D-изображения обследования, чтобы получить основное 2D-изображение; определение 2D-положения вставки 2D FTI в основное 2D-изображение; определение положения 3D FTI на 3D-изображении обследования в направлении глубины в 2D-положении вставки; и вставку по меньшей мере одного 3D FTI в определенное положение.
[0074] 3D FTI вставляются, как описано выше, но в некоторых вариантах осуществления настоящего изобретения 2D FTI, соответствующее по меньшей мере одному 3D FTI, можно вставить в 2D-изображение обследования для обследуемого предмета.
[0075] Кроме того, в отношении проблемы в уровне техники некоторые варианты осуществления настоящего изобретения предлагают технологию быстрой отметки подозрительного предмета. После того, как из данных удаляются прозрачные области, новые положения падения и выхода отслеживаемого луча получаются и записываются в качестве карты глубин. На основании этого восстанавливается информация о глубине 2D-отметки в пространстве вокселов. Над двумя полученными геометрическими формами выполняется операция булева пересечения в пространстве изображений, чтобы в конечном счете получить отмеченную область в 3D-пространстве.
[0076] Например, в некоторых вариантах осуществления прежде всего удаляются прозрачные области, чтобы быстро получить компактный иерархический ограничивающий прямоугольник из непрозрачных областей в данных, а затем визуализируется сформированный выше иерархический ограничивающий прямоугольник, чтобы получить карту глубин на передней стороне и карту глубин на задней стороне, которые являются уравненными положениями падения и выхода отслеживаемого луча. Далее выполняется первое считывание в направлении текущей линии визирования, и выполняется поиск на картах глубин на передней стороне и задней стороне, используя столбцы из отмеченных точек, чтобы сформировать ограничивающий прямоугольник, например ограничивающий прямоугольник OBB. Затем диапазон отслеживания лучей обновляется в соответствии со сформированным выше ограничивающим прямоугольником OBB, и второе считывание выполняется под ортогональным углом обзора, поворот на который автоматически происходит с текущего угла обзора, чтобы сформировать новый ограничивающий прямоугольник OBB. Над ограничивающими прямоугольниками OBB, которые получаются на двух предыдущих этапах, выполняется операция булева пересечения в пространстве изображений, чтобы получить окончательную отмеченную область. В конечном счете подозрительная область отображается совместно с исходными данными, используя основанную на ограниченности пространства функцию преобразования. С помощью раскрытого в этом документе способа отметки можно быстро и точно удалить прозрачные области из данных КТ, что дает пользователю возможность быстро завершить задачу отметки подозрительной области удобным образом.
[0077] Фиг. 4B - блок-схема алгоритма, иллюстрирующая способ для отметки подозрительного предмета в системе КТ в соответствии с вариантом осуществления настоящего изобретения. После того, как устройство КТ получает данные КТ, прежде всего удаляются прозрачные области из данных КТ. После того, как из данных быстро удаляются прозрачные области, новые положения падения и выхода луча записываются в качестве карты глубин. В процессе считывания восстанавливается информация о глубине 2D-отметок в пространстве вокселов путем запроса информации о глубине в карте глубин в соответствии с 2D-отметками, и над двумя полученными геометрическими формами выполняется операция булева пересечения в пространстве изображений, чтобы в конечном счете получить отмеченную область в 3D-пространстве.
[0078] На этапе S411 прозрачные области удаляются из данных КТ, полученных системой КТ для досмотра, на основании предварительного интегрирования, чтобы получить иерархический ограничивающий прямоугольник из непрозрачных областей в данных КТ.
[0079] 1) Формирование таблицы поиска для предварительного интегрирования на основании непрозрачности
[0080] Поле 3D-данных, обработанное с помощью объемной визуализации, содержит дискретные данные, заданные в 3D-пространстве, и все поле данных представляется дискретной 3D-матрицей. Каждый небольшой прямоугольник в 3D-пространстве представляет собой скалярное значение, называемое вокселом. При практическом вычислении воксел может действовать как выборочная точка в поле 3D-данных, и выборочным скалярным значением является s. Для поля s(x) данных прежде всего нужно классифицировать данные объема, чтобы задать цвета и коэффициенты затухания. Интенсивность s данных объема отображается в цвет I(s) и коэффициент τ(s) затухания с помощью введения функции преобразования. В примере функция преобразования определяется данными об уровне серого и данными о материале от двухэнергетической КТ и также называется 2D-таблицей цветов.
[0081] При объемной визуализации, когда выбирается 3D скалярное поле s(x), частота выборки Найквиста у функции непрозрачности τ(s(x)) равна максимальной частоте выборки Найквиста у τ(s), умноженной на частоту выборки Найквиста у скалярного значения s(x). Из-за нелинейных характеристик коэффициента затухания частота выборки Найквиста может резко повышаться. Чтобы решить проблему, что частота выборки резко повышается из-за нелинейных характеристик функции преобразования, используется способ предварительного интегрирования. После того, как используется способ предварительного интегрирования, можно быстро определить, представляет ли блок данных КТ, что блок является прозрачным.
[0082] Предварительное интегрирование в основном содержит два этапа. Первым этапом является создание выборки непрерывного скалярного поля s(x) в направлении линии визирования. На этом этапе функция преобразования не влияет на частоту выборки. Вторым этапом является выполнение интегрирования объемной визуализации над сегментом между каждыми двумя выборочными точками посредством таблицы поиска.
[0083] После завершения создания выборки s(x) выполняется интегрирование объемной визуализации над каждым сегментом. Процесс интегрирования выполняется посредством таблицы поиска. В таблице поиска существует три параметра, включающие в себя начальную точку Sf=s(x(i·d)) сегмента, конечную точку Sb=s(x((i+1)·d)) сегмента и длину d сегмента. Предположим, что длина d сегмента является постоянной, и во время вычисления посредством таблицы поиска нужно учитывать только два параметра Sf и Sb.
[0084] Непрозрачность i-го сегмента можно представить в виде:

[0085] В вышеприведенное уравнение для ускорения вводится функция интегрирования, и тогда непрозрачность αi=α(sf,sb) можно переписать в виде:
где 
[0086] 2) Удаление прозрачной области на основании октодерева
[0087] Октодерево является древовидной структурой данных для описания 3D-пространства. Фиг. 5 - схематическое представление, иллюстрирующее алгоритм подразделения октодерева. Каждый узел октодерева представляет элемент объема в виде куба. Каждый узел имеет 8 подузлов, и сумма всех элементов объема, представленных 8 подузлами, равна объему родительского узла. Проиллюстрированное на фиг. 5 октодерево включает в себя 8 узлов: ulf, urf, ulb, urb, llf, lrf, llb и lrb. Когда пространственные данные подразделяются с использованием алгоритма кодирования октодерева, предположим, что представляемое тело V можно поместить в достаточно большой куб C, и тогда октодерево для тела V относительно куба C можно задать следующим рекурсивным способом. Каждый узел октодерева соответствует подкубу C, а корневой узел октодерева соответствует самому C. Если V=C, то октодерево V имеет только узел дерева; а если V≠C, то C разделяется поровну на 8 подкубов, причем каждый подкуб соответствует подузлу корневого узла. Если подкуб не совсем пуст или если не полностью занят телом V, то подкуб дополнительно разделяется поровну на 8 частей, и таким образом, соответствующий узел имеет 8 подузлов. Рекурсивные оценка и разделение осуществляются до тех пор, пока соответствующий узлу куб не станет совсем пустым, или не будет полностью занят телом V, или не получит размер, равный предопределенному размеру подкуба.
[0088] Данные объема подразделяются по уровням в соответствии с предопределенным размером листа. Когда проходят поле данных, статистически вычисляют максимум smax и минимум smin всех вокселов в субблоке, соответствующем листу, осевой ограничивающий прямоугольник, соответствующий подпрямоугольнику, и его значение объема. Затем узлы объединяются вверх по уровням для построения октодерева. Схема подразделения октодерева показана на фиг. 5.
[0089] В соответствии с вариантом осуществления настоящего изобретения октодерево проходят для рекурсивного задания состояния видимости каждого узла на каждом уровне. Для узла, не являющегося листом, состояние может быть прозрачным, частично прозрачным или непрозрачным. Состояние узла определяется состояниями подузлов, включенных в этот узел. Если все подузлы прозрачные, то текущий узел является прозрачным; если все подузлы непрозрачные, то текущий узел является непрозрачным; а если часть подузлов прозрачная, то текущий узел является полупрозрачным. Для листа состояние может быть только прозрачным или непрозрачным. Состояние видимости листа получают путем запроса непрозрачности. В частности, когда строится октодерево, сохраняются минимальное и максимальное значения уровня серого (smin,smax) у каждого субблока, и непрозрачность α текущего субблока быстро получают с использованием вышеупомянутой функции α(sf,sb) запроса непрозрачности. Если α≥αε, то текущий лист непрозрачный, где αε является предопределенной пороговой величиной непрозрачности. Как показано на фиг. 6, проиллюстрированы оставшиеся непрозрачные части после того, как удаляются прозрачные блоки, причем большой кубический блок представляет размер, указанный исходными данными.
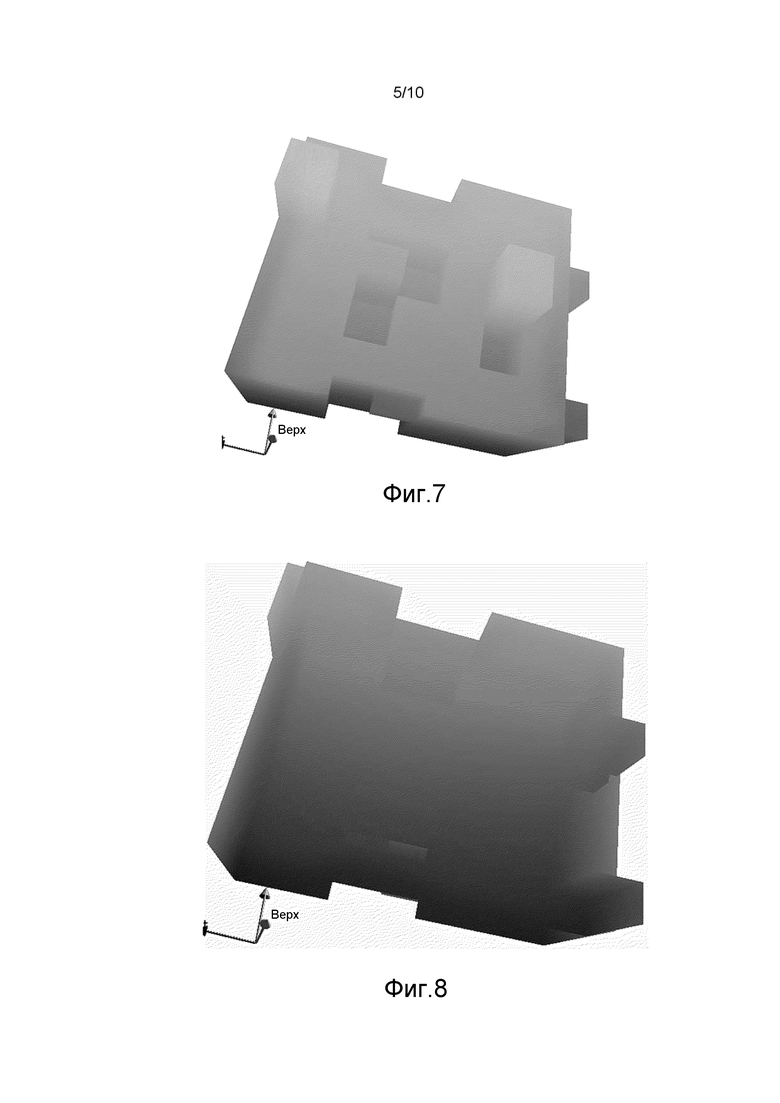
[0090] На этапе S412 визуализируется глубина сцены для иерархического ограничивающего прямоугольника, чтобы получить карту глубин на передней стороне и карту глубин на задней стороне. На этапе S413 выполняется поиск соответственно на карте глубин на передней стороне и карте глубин на задней стороне, используя сделанные пользователем отметки, в направлении линии визирования, чтобы сформировать первый ограничивающий прямоугольник. Фиг. 7 - схема, иллюстрирующая карту глубин на передней стороне в соответствии с вариантом осуществления настоящего изобретения. Фиг. 8 - схема, иллюстрирующая карту глубин на задней стороне в соответствии с вариантом осуществления настоящего изобретения.
[0091] При объемной визуализации нужно использовать 3D-режим в качестве носителя объемной текстуры, а затем объемная текстура отображается в модель с помощью координат текстуры. Затем проводится луч из точки зрения в точку на модели. Луч, проходящий через пространство модели, эквивалентен лучу, проходящему через объемную текстуру. Таким образом, определение положений падения и выхода отслеживаемого луча превращается в проблему решения пересечения луча с носителем объемной текстуры. Как показано на фиг. 7, карту глубин на передней стороне получают путем визуализации карты глубин сцены для полученного выше иерархического ограничивающего прямоугольника и последующего удаления сечений с относительно большими значениями глубины из визуализированной карты глубин сцены, причем значение цвета каждого пикселя на карте глубин на передней стороне представляет расстояние от точки зрения до точки, ближайшей к точке зрения в некотором направлении. Как показано на фиг. 8, карту глубин на задней стороне получают путем визуализации карты глубин сцены для полученного выше иерархического ограничивающего прямоугольника и последующего удаления сечений с относительно малыми значениями глубины из визуализированной карты глубин сцены, причем значение цвета каждого пикселя на карте глубин на задней стороне представляет расстояние от точки зрения до точки, наиболее отдаленной от точки зрения в некотором направлении.
[0092] Фиг. 9 - схема, иллюстрирующая процесс отслеживания лучей в соответствии с вариантом осуществления настоящего изобретения. Основной процесс отслеживания лучей выглядит следующим образом. В частности, луч излучается из каждого пикселя изображения в фиксированном направлении, а затем проходит через всю последовательность изображений. В этом процессе последовательность изображений выбирается и классифицируется для получения значений цвета. Значения цвета накапливаются в соответствии с моделью поглощения лучей до тех пор, пока луч не пройдет через всю последовательность изображений. Значение цвета, получаемое в конечном счете, является цветом визуализированного изображения. Проиллюстрированная на фиг. 9 плоскость отслеживания лучей является вышеупомянутым «изображением».
[0093] В конечном счете с помощью отслеживания лучей получают 2D-изображение, и таким образом, нельзя восстановить информацию о глубине вокселов, через которые проходит отслеживаемый пиксельный луч. Чтобы завершить считывание областей в пространстве вокселов, как показано на фиг. 10, на плоскости отслеживания лучей отмечается подозрительная область, и отмеченный результат показан на фиг. 11. Чтобы восстановить информацию о глубине в пространстве вокселов из отмеченного результата, отмеченное событие дискретизируется на столбцы точек, и выполняется поиск соответственно на карте глубин на передней стороне и карте глубин на задней стороне, чтобы получить результат проекции отмеченной области на те карты глубин. Фиг. 12 - схема, иллюстрирующая процесс поиска на передней стороне и задней стороне с использованием отметок пользователя в соответствии с вариантом осуществления настоящего изобретения. В этом случае одна операция 2D-отметки на изображении на экране восстанавливается до 3D-отметок в пространстве вокселов.
[0094] После выполнения одной операции отметки диапазон подозрительной области все еще относительно большой. Чтобы дополнительно сократить подозрительную область, нужно вычислить иерархический ограничивающий прямоугольник OBB, соответствующий столбцам из отмеченных точек в пространстве вокселов.
[0095] Основополагающая идея способа с ограничивающим прямоугольником состоит в замене различных сложных геометрических форм простыми геометрическими формами. Прежде всего выполняется грубое обнаружение над ограничивающими прямоугольниками предмета. Только когда ограничивающие прямоугольники пересекаются, могут пересекаться геометрические формы, ограниченные ограничивающими прямоугольниками. Когда ограничивающие прямоугольники не пересекаются, геометрические формы, ограниченные ограничивающими прямоугольниками, должны не пересекаться. Таким образом, можно исключить большое количество геометрических форм и геометрических частей, которые не могут пересекаться, чтобы быстро найти геометрические части, которые пересекаются. Существует несколько видов ограничивающих прямоугольников, а именно выровненный по координатным осям ограничивающий прямоугольник (AABB), ограничивающая сфера, ограничивающий прямоугольник OBB в любом направлении и более общий ограничивающий прямоугольник k-dop. После того, как оценивается компактность огибающей и вычислительные затраты у различных ограничивающих прямоугольников, выбирается ограничивающий прямоугольник OBB для вычисления столбцов из отмеченных точек. Принципиальным моментом вычисления ограничивающего прямоугольника OBB является нахождение оптимального направления и определение минимального размера ограничивающего прямоугольника, который ограничивает предмет в том направлении. Положение и направление ограничивающего прямоугольника вычисляются с использованием статистики момента первого порядка (среднее значение) и момента второго порядка (ковариационная матрица). Предположим, что i-ой вершиной является pi, а количество вершин, ограниченных ограничивающим прямоугольником, равно n. Центральное положение ограничивающего прямоугольника выглядит следующим образом:

[0096] Предположим, что ковариационная матрица представляется в виде:

[0097] Элементы ковариационной матрицы представляются в виде:

где  является вектором 3×1, а
является вектором 3×1, а 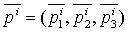 .
.
[0098] Собственные векторы ковариационной матрицы решаются численным методом и объединяются. Так как C является вещественной симметричной матрицей, собственные векторы матрицы C ортогональны друг другу и могут использоваться в качестве осей направлений у ограничивающего прямоугольника. Вершины ограничиваемой геометрической формы проецируются на оси направлений, чтобы найти проективные интервалы на соответствующих осях направлений. Длины соответствующих проективных интервалов обычно представляют размер решаемого ограничивающего прямоугольника. Фиг. 13 - схема, иллюстрирующая ограничивающий прямоугольник OBB со столбцами из отмеченных точек в соответствии с вариантом осуществления настоящего изобретения.
[0099] На этапе S414 луч бросают при сформированном первом ограничивающем прямоугольнике в качестве носителя текстуры. На этапе S415 поиск выполняется соответственно на карте глубин на передней стороне и карте глубин на задней стороне, используя сделанные пользователем отметки, в направлении, ортогональном направлению линии визирования, чтобы сформировать второй ограничивающий прямоугольник.
[00100] 1) Обновление диапазона отслеживания лучей
[00101] Как показано на фиг. 14, после того, как определяется диапазон подозрительной области, из отображения удаляются части за пределами области, и луч бросают с использованием сформированного ограничивающего прямоугольника OBB в качестве нового носителя объемной текстуры.
[00102] 2) Второе считывание после поворачивания угла обзора
[00103] Фиг. 15 - схема, иллюстрирующая результат от нанесения отметок во второй раз в ортогональном направлении в соответствии с вариантом осуществления настоящего изобретения. Фиг. 16 иллюстрирует результат, полученный в результате поиска на передней стороне и задней стороне с использованием отметок, сделанных во второй раз, в соответствии с вариантом осуществления настоящего изобретения. Фиг. 17 - схема, иллюстрирующая ограничивающий прямоугольник OBB со столбцами из отмеченных точек в соответствии с вариантом осуществления настоящего изобретения. На этапе S416 выполняется операция булева пересечения над первым ограничивающим прямоугольником и вторым ограничивающим прямоугольником в пространстве изображений, чтобы получить отмеченную область в 3D-пространстве. Фиг. 18 - схема, иллюстрирующая процесс выполнения операции булева пересечения над двумя предметами в пространстве изображений в соответствии с вариантом осуществления настоящего изобретения.
[00104] Чтобы ускорить получение пересеченной области между двумя ограничивающими прямоугольниками OBB, для вычисления используется метод Конструктивной блочной геометрии (CSG). Модель CSG можно визуализировать с использованием OpenGL в двух направлениях. В одном направлении модель CSG визуализируется на основании пространства предметов. В частности, модель CSG преобразуется непосредственно в набор многоугольников, а затем визуализируется с использованием OpenGL. Типичным способом для этого решения является преобразование модели CSG в модель контурного представления (B-rep). Однако преобразование модели приводит к низкой эффективности и неудобно для динамического изменения. В другом направлении модель CSG визуализируется на основании пространства изображений, которое используется в настоящем изобретении.
[00105] Операция пересечения выполняется в пространстве изображений без изменения модели, и операция выполняется динамически для каждого кадра, чтобы решить, какую поверхность (поверхности) следует отобразить, а какую поверхность (поверхности) следует скрыть или удалить. Операция пересечения в CSG достигается с использованием буфера трафарета (шаблона) в OpenGL. В идее отслеживания лучей, когда поверхность предмета проецируется на экран, вычисляется количество пересечений пикселей на его поверхности по отношению к другим поверхностям.
[00106] С помощью вышеупомянутых операций получено два куба. Поиск пересечений между двумя кубами по существу состоит в нахождении частей поверхности одного куба в объеме другого куба. В процессе поиска пересечений передняя поверхность и задняя поверхность любого заданного составляющего предмета визуализируются соответствующим образом в соответствующих каналах. В частности, в каждом процессе визуализации текущая поверхность сначала переводится в буфер глубины, а затем части текущей поверхности в других предметах определяются с использованием других предметов совместно с операцией плоскости трафарета.
[00107] Здесь с использованием контроля четности оценивается, находится ли точка в заданном пространстве предмета. Теоретически с помощью контроля четности можно оценить, находится ли в заданном объеме какая-нибудь точка в пространстве. Однако, поскольку буфер глубины в OpenGL может хранить только одно значение глубины для каждого пикселя, процесс контроля четности при визуализации пересечения между предметом A и предметом B выглядит следующим образом. Прежде всего находятся и визуализируются части A в B, а затем находятся и визуализируются части B в A. В то же время визуализирована передняя сторона A в B. Чтобы получить переднюю сторону B в A, прежде всего повторно визуализируются пиксели в буфере глубины, которые закрываются передней стороной B. Причина в том, что все части A находятся в буфере глубины после вышеупомянутых операций, и части A за пределами B могут заслонять части B, которые должны быть видимыми. После того, как исправлены значения глубины у B в буфере глубины, части передней стороны B в A находятся и визуализируются аналогично вышеуказанному, и описание этого здесь будет пропущено. Фиг. 19 - схема, иллюстрирующая полученную в конечном счете отмеченную 3D-область подозрительного предмета в соответствии с вариантом осуществления настоящего изобретения.
[00108] На этапе S417 отмеченная область в 3D-пространстве соединяется и отображается вместе с данными КТ. Например, после того, как получена считанная подозрительная область, нужно соединить подозрительную область с исходными данными и отобразить подозрительную область вместе с исходными данными с более высоким приоритетом видимости. Как видно из Фиг. 18, окончательная подозрительная область может не иметь правильной кубовидной формы. Здесь используется основанная на ограниченности пространства функция преобразования. Формируется одномерная текстура поиска в соответствии с размерностью данных объема, используя алгоритм построчного построения, и каждый тексел хранит информацию о том, находится ли соответствующее пространственное положение в ограничивающем прямоугольнике подозрительной области. Окончательный результат объединенной визуализации показан на фиг. 20.
[00109] К тому же, когда TIP вставляется в данные КТ, следует не только обеспечить то, что вставленная TIP находится в диапазоне границ, но и то, что вставленное изображение также не закрывает исходные предметы в границах. Кроме того, требование реального масштаба времени для алгоритма также является важным фактором, который нужно учитывать. В соответствии с некоторыми вариантами осуществления прозрачные области и непрозрачные области в данных объема определяются в соответствии с непрозрачностью, и части пустых областей границ, объемы которых отвечают требованиям, выбираются в качестве возможных положений вставки, и в конечном счете выбирается положение вставки с заданным уровнем маскирования в соответствии с расстоянием от положения до плоскости наблюдения и количеством предметов вокруг того положения.
[00110] Например, таблица поиска для предварительного интегрирования формируется на основании непрозрачности, чтобы быстро определить прозрачные области и непрозрачные области в данных объема. Затем непрозрачное октодерево строится для данных объема, чтобы определить положения и размеры границ в данных КТ. Затем прозрачное октодерево строится для данных объема, чтобы получить области в границах, доступные для вставки, причем прозрачное октодерево только статистически вычисляет прозрачные части в области данных и полностью исключает непрозрачные части. Части прозрачных областей, чьи объемы отвечают требованиям вставки, выбираются в качестве возможных положений вставки. Окончательное положение вставки определяется в соответствии с заданным уровнем маскирования вставки.
[00111] С помощью раскрытых в этом документе решений FTI можно быстро вставить в данные КТ, и можно обеспечить, что положение вставки находится в границах наряду с тем, что вставленное изображение не закрывает исходные предметы в границах. Уровень маскирования вставки может задаваться с помощью параметра (параметров), и у алгоритма можно обеспечить производительность реального масштаба времени.
[00112] В вышеприведенном подробном описании изложены с использованием схем, блок-схем алгоритмов и/или примеров различные варианты осуществления способа и устройства для отметки подозрительного предмета в системе КТ для досмотра. В случае, если такая схема, блок-схема алгоритма и/или пример включает в себя одну или более функциональных возможностей и/или операций, специалисты в данной области техники поймут, что каждую функциональную возможность и/или операцию на схеме, блок-схеме алгоритма или в примере можно реализовать по отдельности и/или вместе посредством широкого диапазона структур, аппаратных средств, программного обеспечения, микропрограммного обеспечения или по существу любого их сочетания. В одном варианте осуществления несколько частей объекта изобретения, описанных в вариантах осуществления настоящего изобретения, можно реализовать посредством специализированной интегральной схемы (ASIC), программируемой пользователем вентильной матрицы (FPGA), цифрового процессора сигналов (DSP) или в других интегральных форматах. Однако специалисты в данной области техники примут во внимание, что некоторые аспекты раскрытых в этом документе вариантов осуществления можно полностью или частично реализовать равноценно в интегральных схемах, в виде одной или более компьютерных программ, работающих на одном или более компьютерах (например, в виде одной или более программ, работающих в одной или более компьютерных системах), в виде одной или более программ, работающих на одном или более процессорах (например, в виде одной или более программ, работающих на одном или более микропроцессорах), в виде микропрограммного обеспечения или по существу в виде любого их сочетания, и что проектирование схем и/или написание кодов для программного обеспечения и/или микропрограммного обеспечения было бы вполне по силам специалистам в данной области техники в связи с этим изобретением. К тому же специалисты в данной области техники примут во внимание, что механизмы описанного в этом документе предмета изобретения можно распространять в виде программного продукта в различных формах, и что иллюстративные варианты осуществления описанного в этом документе объекта изобретения применяются независимо от конкретных типов носителей сигналов, используемых для фактического осуществления распространения. Примеры носителей сигналов включают в себя, не ограничиваясь, записываемые носители, например дискету, накопитель на жестком диске, компакт-диск (CD), цифровой универсальный диск (DVD), цифровую магнитную ленту, память компьютера или т.п., и среды передачи, например цифровые и/или аналоговые средства связи (например, волоконно-оптический кабель, волновод, линию проводной связи, линию беспроводной связи или т.п.).
[00113] Хотя настоящее изобретение описано в отношении нескольких вариантов осуществления, специалистам в данной области техники очевидно, что термины используются для иллюстрации и объяснения, а не для ограничения. Раскрытую в этом документе технологию можно реализовать в различных формах без выхода за рамки сущности настоящего изобретения. Следует понимать, что варианты осуществления не ограничены вышеупомянутыми подробностями и должны широко интерпретироваться в рамках сущности и объема, определяемых нижеследующей формулой изобретения. Поэтому все модификации и альтернативы, входящие в объем формулы изобретения или ее эквивалентов, должны охватываться прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКАНАЛЬНЫЙ ДОСМОТРОВЫЙ СКАНЕР ТЕЛА | 2020 |
|
RU2786702C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ОБЛАКА ТОЧЕК | 2020 |
|
RU2799041C1 |
| ФОРМИРОВАНИЕ ДАННЫХ ОБЪЕКТА | 2010 |
|
RU2549141C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОДИРОВАНИЯ ОБЛАКА ТОЧЕК | 2021 |
|
RU2792020C1 |
| ОБНАРУЖЕНИЕ СКРЫТОГО ОБЪЕКТА | 2004 |
|
RU2371735C2 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ СПИРАЛЬНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2396551C1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ СОЗДАНИЯ ТРЕХМЕРНОГО ТЕКСТУРНОГО АТЛАСА | 2012 |
|
RU2604674C2 |
| ОБРАБОТКА ОБЛАКА ТОЧЕК | 2019 |
|
RU2767775C1 |
| СВЕРТОЧНАЯ НЕЙРОННАЯ СЕТЬ НА ОСНОВЕ ОКТОДЕРЕВА | 2018 |
|
RU2767162C2 |
| СПОСОБ ПОЛУЧЕНИЯ КАРТЫ ГЛУБИНЫ ИЗОБРАЖЕНИЯ ПОВЫШЕННОГО КАЧЕСТВА | 2011 |
|
RU2587425C2 |









Использование: для досмотра объекта посредством компьютерной томографии (КТ). Сущность изобретения заключается в том, что предложены система КТ для досмотра и соответствующий способ. Способ включает в себя: считывание данных обследования для обследуемого предмета; вставку по меньшей мере одного фиктивного трехмерного (3D) изображения опасного предмета (FTI) в 3D-изображение обследования для обследуемого предмета, которое получают из данных обследования; прием выбора по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на двумерном (2D) изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, причем 2D-изображение обследования получают из 3D-изображения обследования или получают из данных обследования; и выдачу в ответ на упомянутый выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI. Технический результат: обеспечение возможности быстро отмечать подозрительный предмет на КТ-изображении, определяя посредством обратной связи изображение опасного предмета. 2 н. и 14 з.п. ф-лы, 21 ил.
1. Способ в системе компьютерной томографии (КТ) для досмотра, содержащий этапы, на которых:
считывают данные обследования для обследуемого предмета;
вставляют по меньшей мере одно фиктивное трехмерное (3D) изображение опасного предмета (FTI) в 3D-изображение обследования для обследуемого предмета, причем 3D-изображение обследования получают из данных обследования;
принимают выбор по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на двумерном (2D) изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, причем 2D-изображение обследования получают из 3D-изображения обследования или получают из данных обследования; и
выдают в ответ на упомянутый выбор обратную связь о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI.
2. Способ по п. 1, в котором этап, на котором принимают выбор по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на 2D-изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI, содержит этап, на котором:
принимают координаты части 3D-изображения обследования или 2D-изображения обследования, ассоциированной с упомянутым выбором.
3. Способ по п. 1, в котором этап, на котором выдают в ответ на упомянутый выбор обратную связь о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит по меньшей мере один из этапов, на которых:
оценивают, включает ли в себя по меньшей мере одна выбранная область по меньшей мере одно 3D FTI;
отображают диалог для подтверждения, что 3D-изображение обследования включает в себя по меньшей мере одно 3D FTI;
выдают текстовое указание в интерфейсе для подтверждения, что 3D-изображение обследования включает в себя по меньшей мере одно 3D FTI;
выделяют часть 3D-изображения обследования или 2D-изображения обследования, ассоциированную с выбором;
отмечают часть 3D-изображения обследования или 2D-изображения обследования, ассоциированную с выбором; и
заполняют часть 3D-изображения обследования или 2D-изображения обследования, ассоциированную с выбором, конкретным цветом или узором.
4. Способ по п. 1, в котором вычисляют по меньшей мере один параметр пространственной характеристики обследуемого предмета в соответствии с данными обследования, и по меньшей мере одно 3D FTI вставляют в 3D-изображение обследования для обследуемого предмета на основании параметра пространственной характеристики.
5. Способ по п. 4, в котором параметр пространственной характеристики относится по меньшей мере к одному из положения, размера и ориентации вставляемого 3D FTI.
6. Способ по п. 1, в котором выбор по меньшей мере одной области содержит этап, на котором выбирают часть отображенного 3D-изображения обследования под некоторым углом обзора.
7. Способ по п. 6, в котором при 3D-визуализации 3D-изображения обследования записывают информацию об облаке точек, характеризующую обследуемый предмет, и этап, на котором в ответ на упомянутый выбор выдают обратную связь о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит этапы, на которых:
получают последовательность кластеров информации об облаке точек для различных предметов в обследуемом предмете путем разделения;
определяют по меньшей мере одну выбранную область из последовательности кластеров информации об облаке точек для различных предметов на основании заданного критерия; и
оценивают, включает ли в себя по меньшей мере одна выбранная область по меньшей мере одно 3D FTI.
8. Способ по п. 1, в котором выбор по меньшей мере одной области содержит этап, на котором выбирают часть отображенного 3D-изображения обследования под множеством углов обзора.
9. Способ по п. 8, в котором выбор по меньшей мере одной области содержит этап, на котором выбирают часть отображенного 3D-изображения обследования под двумя разными углами обзора, причем два разных угла обзора являются по существу ортогональными друг другу, прозрачные области удаляют из данных обследования, чтобы получить иерархический ограничивающий прямоугольник из непрозрачных областей в данных обследования, а затем визуализируют глубину сцены для иерархического ограничивающего прямоугольника, чтобы получить карту глубин на передней стороне и карту глубин на задней стороне, и этап, на котором в ответ на упомянутый выбор выдают обратную связь о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI, содержит этапы, на которых:
выполняют поиск, соответственно, на карте глубин на передней стороне и карте глубин на задней стороне в соответствии с выбранной пользователем областью под первым углом обзора, чтобы сформировать первый ограничивающий прямоугольник;
выполняют отслеживание лучей при сформированном первом ограничивающем прямоугольнике в качестве носителя текстуры;
выполняют поиск, соответственно, на карте глубин на передней стороне и карте глубин на задней стороне в соответствии с выбранной пользователем областью под вторым углом обзора, по существу ортогональным первому углу обзора, чтобы сформировать второй ограничивающий прямоугольник;
выполняют операцию булева пересечения над первым ограничивающим прямоугольником и вторым ограничивающим прямоугольником в пространстве изображений, чтобы получить отмеченную область в 3D-пространстве в качестве по меньшей мере одной выбранной области; и
оценивают, включает ли в себя по меньшей мере одна выбранная область по меньшей мере одно 3D FTI.
10. Способ по п. 1, в котором этап, на котором вставляют по меньшей мере одно 3D FTI в 3D-изображение обследования для обследуемого предмета, содержит этапы, на которых:
разделяют 3D-изображение обследования, чтобы получить множество фрагментов 3D-изображения обследуемого предмета;
вычисляют расстояния между множеством фрагментов 3D-изображения и их положения; и
вставляют 3D FTI на основании вычисленных расстояний и положений.
11. Способ по п. 1, в котором этап, на котором вставляют по меньшей мере одно 3D FTI в 3D-изображение обследования для обследуемого предмета, содержит этапы, на которых:
определяют прозрачные части и непрозрачные части в данных объема обследуемого предмета на основании значений непрозрачности вокселов;
определяют положения и размеры границ обследуемого предмета из непрозрачных частей в данных объема;
определяют возможные положения вставки в прозрачные области в диапазоне границ; и
выбирают по меньшей мере одно положение из возможных положений вставки в соответствии с заданным критерием, чтобы вставить по меньшей мере одно 3D FTI по меньшей мере в одно выбранное положение.
12. Способ по п. 1, в котором этап, на котором вставляют по меньшей мере одно 3D FTI в 3D-изображение обследования для обследуемого предмета, содержит этапы, на которых:
удаляют фоновое изображение из 2D-изображения обследования, чтобы получить основное 2D-изображение;
определяют 2D-положение вставки 2D FTI в основное 2D-изображение;
определяют положение 3D FTI на 3D-изображении обследования в направлении глубины в 2D-положении вставки; и
вставляют по меньшей мере одно 3D FTI в определенное положение.
13. Способ по п. 1, дополнительно содержащий этап, на котором: вставляют 2D FTI, соответствующее по меньшей мере одному 3D FTI, в 2D-изображение обследования для обследуемого предмета.
14. Система компьютерной томографии (КТ) для досмотра, содержащая:
устройство КТ-сканирования, выполненное с возможностью получения данных обследования для обследуемого предмета;
запоминающее устройство, выполненное с возможностью хранения данных обследования;
устройство отображения, выполненное с возможностью отображения трехмерного (3D) изображения обследования и/или двумерного (2D) изображения обследования для обследуемого предмета, причем 3D-изображение обследования получают из данных обследования, а 2D-изображение обследования получают из 3D-изображения обследования или данных обследования;
устройство обработки данных, выполненное с возможностью вставки по меньшей мере одного фиктивного 3D-изображения опасного предмета (FTI) в 3D-изображение обследования для обследуемого предмета; и
устройство ввода, выполненное с возможностью приема выбора по меньшей мере одной области на 3D-изображении обследования, включающей в себя 3D FTI, или по меньшей мере одной области на 2D-изображении обследования, включающей в себя 2D FTI, соответствующее 3D FTI,
причем устройство обработки данных дополнительно выполнено с возможностью выдачи в ответ на упомянутый выбор обратной связи о 3D-изображении обследования, включающем в себя по меньшей мере одно 3D FTI.
15. Система КТ для досмотра по п. 14, в которой устройство обработки данных дополнительно выполнено с возможностью вычисления по меньшей мере одного параметра пространственной характеристики обследуемого предмета в соответствии с данными обследования и для вставки по меньшей мере одного 3D FTI в 3D-изображение обследования для обследуемого предмета на основании параметра пространственной характеристики.
16. Система КТ для досмотра по п. 14, в которой параметр пространственной характеристики относится по меньшей мере к одному из положения, размера и ориентации вставляемого 3D FTI.
| СПОСОБ УЛУЧШЕНИЯ РАСПОЗНАВАЕМОСТИ МАТЕРИАЛА В РЕНТГЕНОВСКОЙ КОНТРОЛЬНОЙ УСТАНОВКЕ И РЕНТГЕНОВСКАЯ КОНТРОЛЬНАЯ УСТАНОВКА | 2008 |
|
RU2462702C2 |
| УСТРОЙСТВО ПОЛУЧЕНИЯ РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЙ И СПОСОБ ПОЛУЧЕНИЯ РЕНТГЕНОВСКИХ ИЗОБРАЖЕНИЙ | 2009 |
|
RU2467355C1 |
| СИСТЕМА И СПОСОБ ДЛЯ РЕКОНСТРУИРОВАНИЯ ИЗОБРАЖЕНИЯ ПОСРЕДСТВОМ СКАНИРОВАНИЯ ПО ПРЯМОЛИНЕЙНОЙ ТРАЕКТОРИИ | 2006 |
|
RU2334973C1 |
| СПОСОБ ДОСМОТРА ГРУЗОВ С ИСПОЛЬЗОВАНИЕМ СПИРАЛЬНОГО СКАНИРОВАНИЯ | 2007 |
|
RU2396551C1 |
| US 20110227910A1, 22.09.2011 | |||
| US 20110058646A1, 10.03.2011. | |||

