Изобретение относится к области горных машин и строительства, а также к вибротехнике, а именно к регулируемым ударным и вибрационным машинам, и может быть использовано при добыче полезных ископаемых невзрывными способами, например экскаваторами (5…10 м3), драглайнами (25…100 м3) и мощными скреперами, снабженными ковшами активного действия, выемке мерзлых грунтов.
Известен ковш активного действия экскаватора (КАДЭ) с пневматическими машинами ударного действия (патент №2149952 (РФ) Экскаватор с ковшом активного действия / Маттис А.Р., Лабутин В.Н., Дмитриев В.Н. и др., опубликован 27.05.2000, бюллетень №15).
В этом КАДЭ используются известные пневматические машины ударного действия, подключенные к компрессору с давлением 0,5 МПа (5 атм), что не обеспечивает необходимой производительности экскаваторов типов ЭКГ-5В, ЭКГ-12 и др.
Известен также КАДЭ (Маттис А.Р. и др. Безвзрывные технологии открытой добычи твердых полезных ископаемых / [А.Р. Маттис и др.]: отв. ред. В.Н. Опарин; Российская академия наук, сибирское отделение, институт горного дела, институт горного дела севера; Уральское отделение, институт горного дела. - Новосибирск. Изд. СО РАН, 2007 г., с. 337, 166, 167, 220), являющийся прототипом, где в КАДЭ используются ударные пневматические машины 3 шт., работающие на давлении воздуха 0,5 МПа (5 атм), стр. 167, рис. 4.8, или гидравлические ударные машины, стр. 220, рис. 5.9, работающие при давлении до 30 МПа (300 атм). Эти КАДЭ в активных рабочих зубцах имеют силовые органы пневматических или гидравлических молотов с бойками, воздействующими в ударном режиме через толкатели, возвратные элементы и сами зубцы на горную породу.
Но даже такие высокие давления по сравнению с пневматическими приводами, работающими на давлении 0,5…1 МПа (5…10 атм), не обеспечивают необходимой производительности современных экскаваторов, когда требуется разрабатывать породы с прочностью до 100…120 МПа, разработка которых создает усилия при соударении инструмента с горной породой до 3…4 МН, стр. 85 [2], и дает при этом на лезвии зуба усилия 3500…4500 кН и более, стр. 111 [2], что в несколько раз выше показателей копания современных гидравлических экскаваторов равного класса.
То есть исходя из последних всеобъемлющих исследований и экспериментов необходимо создание исполнительных органов КАДЭ с минимальными параметрами (Wуд=5…10 кДж, частотой ударов до 20…25 Гц, предударной скоростью 10…15 м/с, временем соударения 2…3 мс), что ведет к необходимой подводимой мощности 3-машинного КАДЭ в 300-400 кВт с использованием современных отечественных маслостанций и моторов с давлением 30…40 МПа и скоростями вращения 1500…3000 об/мин.
Современное же состояние КАДЭ, несмотря на большие сложности при изготовлении, отличается крайне низкой надежностью управления и малой энергоемкостью.
Задачей (техническим результатом) изобретения является упрощение процесса изготовления и управления исполнительным органом КАДЭ при увеличении энергоемкости этого органа, что, соответственно, повышает производительность и увеличивает надежность работы КАДЭ.
Указанная задача достигается тем, что ковш активного действия экскаватора содержит, непосредственно, корпус ковша экскаватора и силовой исполнительный орган в виде механизмов ударного действия с толкателями, рабочими зубцами и ограничителями их хода, а также с возвратными элементами, сам силовой исполнительный орган выполнен в виде массивного эксцентрикового вала в подшипниковых опорах корпуса ковша, с n эксцентриковыми элементами на валу, смещенными вдоль и повернутыми вокруг оси этого вала относительно друг друга с шагом 360/n градусов по его окружности, толкатели рабочих зубцов выполнены с одной стороны вилкообразными в контакте с эксцентриками, где их продольные оси перпендикулярны оси вращения эксцентриков, а с другой стороны толкатели имеют сферические торцы, контактирующие с рабочими зубцами, которые напрямую взаимодействуют с горной породой, при этом внутри концов массивного вала установлены приводные двигатели, механически соединенные с массивным валом для передачи момента вращения, а приводные двигатели подключены к частотно-регулируемой системе управления.
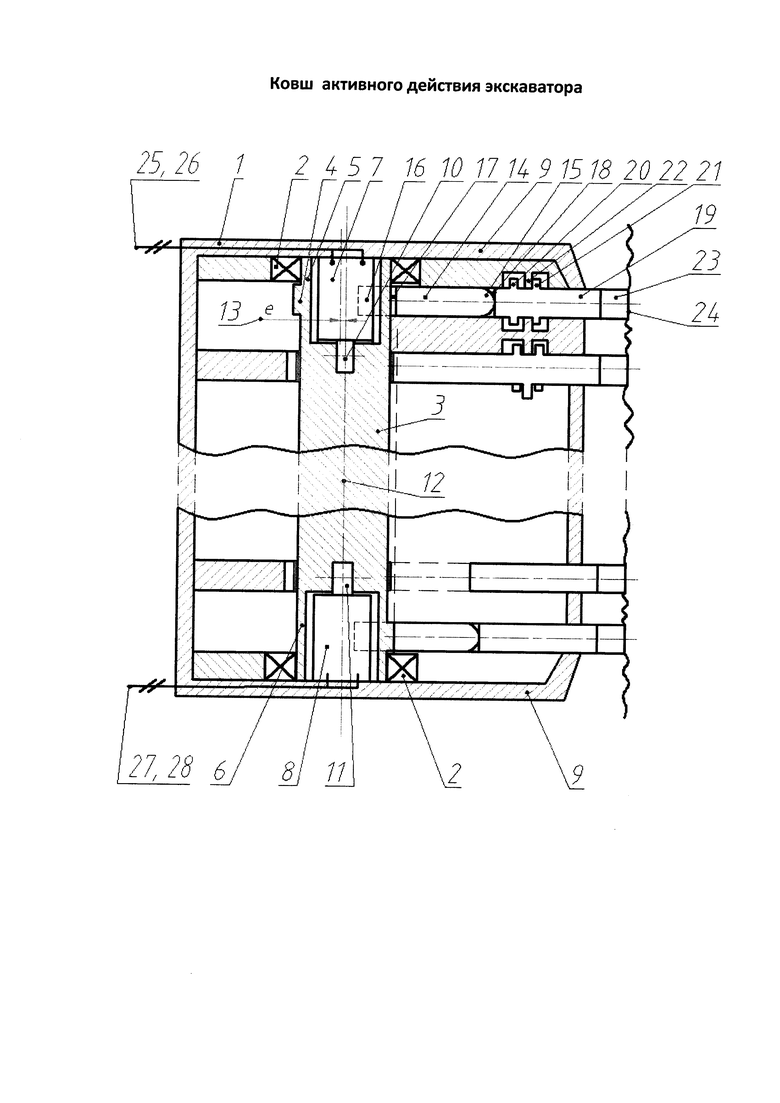
На чертеже приведена конструкция предлагаемого КАДЭ, который содержит литой массивный корпус-ковш 1, в днище которого в подшипниках 2 расположен массивный вал 3 с эксцентриками, равномерно размещенными по длине вала и смещенными по окружности на 360/n градусов (на чертеже показан один эксцентрик 4). Внутри концов 5, 6 вала 3 расположены приводные двигатели КАДЭ 7, 8, закрепленные на боковых стенках 9 ковша, а валы 10,11 двигателей механически связаны с массивным валом 3 соосно вдоль его оси вращения 12. Каждый из n эксцентриков массивного вала, смещенный относительно центральной оси 12 на величину е эксцентриситета 13, связан с вилкообразным концом 16 толкателя 14 со сферическим наконечником 15, взаимодействующим с рабочим зубцом 15. Толкатель 14 сферической опорой 15 опирается в задний торец 18 рабочего зубца 19, имеющий ограничители хода 20, 21 относительно корпуса ковша, снабженного ограничительными упорами 22. Рабочий зубец 19 имеет на конце сменную ударную пику 23, упирающуюся при работе в горный массив 24. Приводные двигатели 7, 8 соединены линиями питания 25, 27 и линиями управления 26, 28 с частотно-регулируемым электроприводом (на чертеже не показано), расположенным внутри экскаватора, подключенного к промышленной электросети или имеющего свою дизель-электрическую станцию необходимой мощности.
КАДЭ работает следующим образом. При подключении к источнику питания посредством линий 25, 26, 27, 28 двигатели 7, 8 через валы 10, 11 начинают вращать массивный вал 3 вокруг его центральной оси 12. Массивный вал 3 вращается в подшипниках 2, установленных в боковых стенках 9 корпуса и днища (на чертеже не показано) ковша 1. При вращении вала 3 n эксцентриков 4 с эксцентриситетами 13, контактируя с вилкой 16 толкателя 14, перемещают сферическими наконечниками 15 рабочий зубец 19. При этом вилкообразный толкатель 14 опирается вилкой 16 на выступающую часть эксцентрика 4 и перемещается на расчетную величину хода 17, то есть на величину е эксцентриситета 13 в поперечном валу 3 направлении, обеспечивая эффект работы кривошипа. Толкатель 14 сферическим концом 15 упирается в задний торец 18 рабочего зубца 19, положение которого устанавливается упорами 22 корпуса ковша 1 при их контакте с ограничителями хода 20, 21 рабочего зубца. В переднем торце рабочего зубца 19 установлена сменная пика 23, упирающаяся при работе в горный массив 24, разрушая его.
В связи с тем что массивный вал 3 имеет значительный момент инерции, двигатели подключены к частотно-регулируемому электроприводу, обеспечивающему плавный пуск механизма КАДЭ посредством линий питания 25, 27 и линий управления 26, 28. Массивный вал 3, разогнавшись до скорости вращения 1500…3000 об/мин, может быть введен в работу КАДЭ стрелой экскаватора. До соприкосновения рабочих зубцов 19 ковша 1 с горным массивом вал 3 работает в холостом режиме. При экскавации все рабочие зубцы ковша совершают поступательное движение с частотой вращения вала 3, поочередно разрушая горную породу 24. Частота виброударов при скорости вращения вала в 1500…3000 об/мин достигает 25…50 Гц, что весьма сложно получить в пневматических и гидравлических КАДЭ.
В предлагаемом КАДЭ все толкатели 14 работают автоматически строго поочередно, обеспечивая виброударный режим работы зубцов 19 с большими частотами и большей энергией ударов при небольшом времени соударения, что увеличивает производительность экскаватора.
Так как приводной массивный вал 3 вращается практически с постоянной скоростью, питающая электростанция и приводные двигатели работают в облегченных режимах.
Конструктивная схема предложенного решения КАДЭ также отличается простотой, что снижает процесс изготовления, так как процесс изготовления массивного вала с эксцентриками многократно проще изготовления пневмо- и гидромолотов, и упрощает управление исполнительным органом КАДЭ при увеличении энергоемкости этого устройства, соответственно, повышая производительность и увеличивая надежность работы КАДЭ и экскаватора в целом по добыче полезных ископаемых с большой прочностью породы, т.е. поставленная задача в решении КАДЭ выполняется полностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| ШНЕКОВЫЙ ИСПОЛНИТЕЛЬНЫЙ ОРГАН С ВНУТРЕННИМ ДВИГАТЕЛЕМ ДЛЯ КОВША КАРЬЕРНОГО ЭКСКАВАТОРА | 2021 |
|
RU2763570C1 |
| СПОСОБ ДОБЫЧИ УДАРНЫМ РЕЗАНИЕМ И ГОРНЫЙ КОМБАЙН УДАРНОГО РЕЗАНИЯ ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2012 |
|
RU2563467C1 |
| СПОСОБ СОЗДАНИЯ АДАПТИРОВАННОГО УДАРА ПРИ ЗАГЛУБЛЕНИИ ИНСТРУМЕНТА В ПОРОДУ И УДАРНЫЙ МЕХАНИЗМ ДВС С ФОРСИРУЕМОЙ ЭНЕРГИЕЙ И МОЩНОСТЬЮ | 2008 |
|
RU2411359C2 |
| ИСПОЛНИТЕЛЬНЫЙ ОРГАН ГОРНОГО КОМБАЙНА | 2002 |
|
RU2209975C1 |
| Рабочее оборудование роторного экскаватора с инерционной разгрузкой | 1990 |
|
SU1754849A1 |
| УДАРНЫЙ МЕХАНИЗМ | 2006 |
|
RU2343280C2 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ПРОЧНЫХ ГОРНЫХ ПОРОД | 2005 |
|
RU2283926C1 |
| Привод горной машины | 1990 |
|
SU1747689A1 |
| ВИБРОМАШИНА | 2007 |
|
RU2334561C1 |
| Устройство для соединения рабочегоОРгАНА C РуКОТью эКСКАВАТОРА | 1979 |
|
SU853018A1 |
Изобретение относится к горной и строительной технике. Ковш активного действия экскаватора содержит корпус и силовой исполнительный орган в виде механизмов ударного действия с толкателями, рабочими зубцами и ограничителями их хода, а также с возвратными элементами. Силовой исполнительный орган ковша активного действия выполнен в виде эксцентрикового вала в подшипниковых опорах корпуса ковша, с n эксцентриковыми элементами на валу, смещенными вдоль и повернутыми вокруг оси этого вала относительно друг друга с шагом 360/n градусов по его окружности. Толкатели рабочих зубцов выполнены с одной стороны вилкообразными в контакте с эксцентриками. Их продольные оси перпендикулярны оси вращения эксцентриков. С другой стороны толкатели имеют сферические торцы, контактирующие с рабочими зубцами, которые напрямую взаимодействуют с горной породой. Внутри концов вала установлены приводные двигатели, механически соединенные с валом для передачи момента вращения и подключенные к частотно-регулируемой системе управления. Технический результат - увеличение энергоемкости и повышение производительности ковша активного действия. 1 ил.
Ковш активного действия экскаватора содержит корпус ковша экскаватора и силовой исполнительный орган в виде механизмов ударного действия с толкателями, рабочими зубцами и ограничителями их хода, а также с возвратными элементами, отличающийся тем, что силовой исполнительный орган ковша активного действия выполнен в виде массивного эксцентрикового вала в подшипниковых опорах корпуса ковша, с n эксцентриковыми элементами на валу, смещенными вдоль и повернутыми вокруг оси этого вала относительно друг друга с шагом 360/n градусов по его окружности, толкатели рабочих зубцов выполнены с одной стороны вилкообразными в контакте с эксцентриками, где их продольные оси перпендикулярны оси вращения эксцентриков, а с другой стороны толкатели имеют сферические торцы, контактирующие с рабочими зубцами, которые напрямую взаимодействуют с горной породой, при этом внутри концов массивного вала установлены приводные двигатели, механически соединенные с массивным валом для передачи момента вращения, а приводные двигатели подключены к частотно-регулируемой системе управления.
| ЭКСКАВАТОР С КОВШОМ АКТИВНОГО ДЕЙСТВИЯ | 1999 |
|
RU2149952C1 |
| Ковш активного действия обратной лопаты | 1971 |
|
SU349330A1 |
| US 3436849 A, 08.04.1969 | |||
| US 3512284 A, 19.05.1970. | |||

