Изобретение относится к области радиолокации и может быть использовано при обнаружении траекторий объектов в обзорных радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР).
Известен способ обнаружения (захвата) траектории объекта, включающий излучение зондирующего сигнала, прием отраженного сигнала, обнаружение объекта, осмотр области вокруг обнаруженного объекта через период времени обращения к объекту, экстраполяцию координат объекта и осмотр зоны вокруг экстраполированной точки через период времени обращения к объекту, экстраполяцию координат объекта и осмотр зоны вокруг следующей экстраполированной точки через период времени обращения к объекту и т.д., принятие решения об обнаружении траектории объекта (Кузьмин С.З. Цифровая обработка радиолокационной информации. М.: Сов. радио, 1967, с.270-272).
Недостатками способа является значительное увеличение размеров стробов захвата траектории при увеличении скорости объекта, что приводит к значительным затратам временных и энергетических ресурсов РЛС при осмотре стробов, а также к большому количеству ложных траекторий, формирующихся по отражениям от пассивных помех, что значительно уменьшает пропускную способность РЛС.
Наиболее близким к заявляемому является способ обнаружения траектории объекта, включающий излучение зондирующего сигнала, прием отраженного сигнала, обнаружение отраженного сигнала в процессе регулярного осмотра зоны обзора РЛС, вычисление границ строба захвата траектории, осмотр строба захвата траектории через интервал времени обращения к объекту ТЗ и обнаружение в нем отраженного сигнала, оценку скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, ..., n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе захвата траектории и в одном из n стробов подтверждения захвата траектории (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.198-200).
Под стробом захвата понимается область пространства с центром в точке обнаружения объекта, в которой с достаточно высокой вероятностью будет находиться объект, движущийся в неизвестном направлении с максимально возможной для него скоростью, через время, равное периоду обращения к объекту в стробе захвата траектории (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.199).
Под стробом подтверждения захвата понимается область в пространстве, в которой с достаточно высокой вероятностью будет находиться объект, движущийся в направлении и со скоростью, экстраполированными на основе предыдущих данных об объекте, через время, равное периоду обращения к объекту в стробе подтверждения захвата траектории (там же).
Известно, что в зоне обзора РЛС всегда существуют какие-либо пассивные помехи. Они могут быть как естественного происхождения (например, метеообразования), так и созданными умышленно (например, дипольные отражатели, намеренно разбрасываемые противником в зоне обзора РЛС с целью скрыть присутствие своих средств нападения). Поэтому часто за отражения зондирующего сигнала от объекта принимаются его отражения от пассивных помех. Формируемые по отражениям от пассивных помех траектории являются ложными. Большинство таких траекторий через некоторое время сбрасывается с сопровождения, но они отвлекает ресурсы системы обработки радиолокационной информации и этим снижают пропускную способность РЛС.
Таким образом, недостатком наиболее близкого технического решения является значительное количество ложных траекторий, формируемых по отражениям от пассивных помех. В результате происходит перегрузка системы обработки радиолокационной информации, уменьшается пропускная способность РЛС.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является уменьшение количества ложных траекторий, формируемых по отражениям от пассивных помех.
Указанный технический результат достигается тем, что в способе обнаружения траектории объекта, включающем излучение зондирующего сигнала, прием отраженного сигнала, обнаружение отраженного сигнала в процессе регулярного осмотра зоны обзора РЛС, вычисление границ строба захвата траектории, осмотр строба захвата траектории через интервал времени обращения к объекту ТЗ и обнаружение в нем отраженного сигнала, оценку скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, ..., n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе захвата траектории и в одном из n стробов подтверждения захвата траектории, согласно изобретению после обнаружения отраженного сигнала при регулярном осмотре зоны обзора РЛС дополнительно вычисляют границы строба подтверждения обнаружения объекта, осматривают его через интервал времени обращения к объекту ТПО1, меньший, чем интервал времени обращения к объекту в стробе захвата траектории ТЗ, при этом, если в стробе подтверждения обнаружения объекта обнаружен отраженный сигнал и координаты объекта, соответствующие обнаруженному сигналу, изменились, то проводят оценку скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, ..., n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе подтверждения обнаружения объекта и в одном из n стробов подтверждения захвата траектории; если отраженный сигнал в стробе подтверждения обнаружения объекта обнаружен, но координаты объекта, соответствующие обнаруженному сигналу, не изменились, то проводят вычисление границ строба захвата траектории, осмотр строба захвата траектории через интервал времени обращения к объекту ТЗ и обнаружение в нем отраженного сигнала, оценку скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, ..., n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе захвата траектории и в одном из n стробов подтверждения захвата траектории; если отраженный сигнал в стробе подтверждения обнаружения объекта не обнаружен, то траектория объекта считается не обнаруженной и ее обнаружение прекращается,
и/или после обнаружения отраженного сигнала в стробе захвата траектории дополнительно вычисляют границы строба подтверждения обнаружения объекта, осматривают его через интервал времени обращения к объекту ТПО2, меньший, чем интервал времени обращения к объекту в стробе подтверждения захвата траектории ТПЗ, при этом, если в стробе подтверждения обнаружения объекта обнаружен отраженный сигнал, то траектория считается обнаруженной, если же отраженный сигнал в стробе подтверждения обнаружения объекта не обнаружен, то производят оценку скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПО3 первого, второго, ..., n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе захвата траектории и в одном из n стробов подтверждения захвата траектории.
Указанный результат достигается также тем, что:
- интервалы времени обращения к объекту в стробе подтверждения обнаружения объекта ТПО1, ТПО2 выбирают исходя из допустимого среднего количества ложных траекторий, формируемых по отражениям от пассивных помех;
- интервалы времени обращения к объекту ТПО1, ТПО2 выбирают в диапазоне 0.1-0.5 с;
- границы строба подтверждения обнаружения объекта вычисляют в соответствии с формулами:
- по дальности: ΔR=±(VR maxТПОi+3σR),
где VR max - максимальная радиальная скорость объекта;
σR - среднеквадратическое отклонение измерения дальности R до объекта;
i=1, 2 - номер строба подтверждения обнаружения объекта, i=1 соответствует ТПО1, i=2 соответствует ТПО2;
- по угловым координатам: 
где α - координата объекта по углу места или по азимуту;
σα - среднеквадратическое отклонение измерения угловой координаты объекта α;
Vα max - максимальная скорость объекта по угловой координате α.
Суть заявляемого технического решения заключается в следующем.
В обзорных РЛС с сопровождением после обнаружения объекта в регулярном обзоре осуществляется обнаружение и сопровождение его траектории. Известно (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.280), что в обзорных РЛС обнаружение траектории объекта осуществляется в соответствии с критерием вида 2/m+1/n. При этом первая часть критерия (2/m) считается критерием захвата траектории, вторая (1/n) - критерием подтверждения захвата траектории. Захват траектории осуществляется в стробах захвата траектории, осматриваемых через интервал времени обращения к объекту ТЗ. Подтверждение захвата траектории осуществляется в стробах подтверждения захвата траектории, осматриваемых с интервалами времени обращения к объекту ТПЗ.
Таким образом, траектория объекта считается обнаруженной, если объект обнаружен не менее двух раз в m последовательных попытках и затем еще хотя бы один раз в n следующих последовательных попытках.
На практике значение m часто берут равным 2, т.е. применяют критерий 2/2+1/n. При этом траектория объекта считается обнаруженной, если отраженный сигнал, обнаруженный при регулярном осмотре зоны обзора РЛС, обнаружен также в стробе захвата траектории (т.е. два раза в двух возможных попытках) и в одном из n стробов подтверждения захвата траектории.
Размеры стробов захвата рассчитываются по известным формулам, исходя из максимально возможной скорости объекта:
- по дальности: 
где VR max - максимальная радиальная скорость объекта;
σR - среднеквадратическое отклонение измерения дальности R до объекта;
- по угловым координатам: 
где α - координата объекта по углу места или по азимуту;
σα - среднеквадратическое отклонение измерения угловой координаты объекта α;
Vα max - максимальная скорость объекта по угловой координате α.
Известно, что в настоящее время скорости воздушных объектов существенно возросли. Появились высокоскоростные объекты. Так, например, скорость современного истребителя может достигать 800 м/с, тактической ракеты - 6000 м/с. Минимальные же скорости объектов - практически нулевые. При захвате траектории объекта, как известно, производится оценка и экстраполяция скорости объекта, поэтому величина интервала времени между моментом обнаружения объекта в процессе регулярного осмотра зоны обзора РЛС и моментом обращения к объекту в стробах захвата траектории ТЗ должна выбираться исходя из требований измерения скорости любых объектов, т.е. как не высокоскоростных, так и высокоскоростных. Исторически сложилось так, что современные обзорные РЛС конструировались в расчете на объекты, имеющие малые и средние скорости (до 300 м/с), т.е. на не высокоскоростные объекты. По этой причине в современных обзорных РЛС величина ТЗ составляет единицы секунд. При обнаружении траекторий не высокоскоростных объектов размеры стробов захвата, вычисляемые в соответствии с формулами (1) и (2), имеют вполне приемлемые размеры.
Поскольку вид средств воздушного нападения, применяемых противником, заранее предсказать практически невозможно, то величина строба захвата должна рассчитываться, в том числе, и на высокоскоростные объекты, т.е. быть достаточно большой. Однако размеры стробов захвата при обнаружении высокоскоростных объектов в ряде случаев оказываются столь большими, что их осмотр из-за ограниченных временных и энергетических ресурсов РЛС становится практически невозможным. Это приводит к резкому снижению пропускной способности РЛС.
Как уже отмечалось, в пространстве, осматриваемом РЛС, всегда существуют пассивные помехи. Они могут быть как естественного происхождения (отражения от протяженных метеообразований), так и созданными умышленно (облака дипольных отражателей, создаваемые противником для маскировки своих средств воздушного нападения). Значительные размеры стробов захвата траектории приводят к тому, что в них попадает большое количество отражений от пассивных помех, по которым, также как и по объектам, формируются траектории. Большинство таких траекторий через некоторое время сбрасывается с сопровождения, но они отвлекают ресурсы системы обработки радиолокационной информации и таким образом также снижают пропускную способность РЛС.
В заявляемых технических решениях введено дополнительное обращение к объекту в «стробе подтверждения обнаружения объекта». Строб подтверждения обнаружения объекта назначается через малый интервал времени TПО1 после обнаружения отраженного сигнала в регулярном обзоре. Причем, величина интервала TПО1 выбирается значительно меньшей, чем интервал времени обращения к объекту в стробе захвата траектории ТЗ. Поэтому величина строба подтверждения обнаружения объекта может быть обеспечена достаточно небольшой и для высокоскоростных объектов.
Это дополнительное «быстрое» обращение к объекту в стробе подтверждения обнаружения объекта позволяет: во-первых, значительно ускорить измерение скорости высокоскоростных объектов и достоверно осуществить экстраполяцию координат, что чрезвычайно важно для обеспечения эффективного поражения таких объекта на достаточно большой дальности, во-вторых, значительно уменьшить количество отражений от пассивных помех и уменьшить тем самым количество траекторий, формируемых по ним.
Первое положение очевидно, так как высокоскоростной объект даже за малое время TПО1 изменит свое положение в стробе подтверждения обнаружения объекта относительно своего положения в момент обнаружении при регулярном обзоре, что будет зафиксировано при осмотре этого строба. Таким образом, указанный строб для высокоскоростного объекта фактически является стробом захвата траектории, так как позволяет измерить скорость и направление перемещения такого объекта.
Второе положение необходимо пояснить.
Известно, что распределенные в пространстве пассивные помехи обладают достаточно большим корреляционным интервалом. Поэтому при обращении к ним в стробах подтверждения обнаружения объекта после момента их обнаружения при регулярном обзоре через интервал времени меньший, чем корреляционный интервал, большинство сигналов, отраженных от пассивных помех, будет обнаружено. В дальнейшем эти обнаруженные отраженные сигналы становятся началом новых траекторий (ложных). Однако если интервал времени обращения к объекту в стробе подтверждения обнаружения объекта выбрать не столь малым, то количество обнаружений пассивных помех уменьшится. При выборе интервала времени обращения к объекту в стробе подтверждения обнаружения объекта целесообразно исходить из допустимого количества обнаружений пассивных помех (и, соответственно, количества ложных траекторий, сформированных по отражениям от них), например, не более 5% от общего количества отражений при регулярном обзоре.
Таким образом, дополнительные операции над обнаруженными отраженными сигналами, полученными в регулярном обзоре и в стробе подтверждения обнаружения объекта, позволяют эффективно уменьшать количество траекторий, формируемых по пассивным помехам, без ухудшения вероятности обнаружения траекторий объектов.
Это подтверждают и эксперименты, проведенные на обзорной РЛС сантиметрового диапазона волн за длительный период времени (несколько лет). Так, определена зависимость среднего количества обнаруживаемых отражений от метеообразований NT при двух последовательных обращениях к ним относительно общего количества отражений N0 от величины интервала времени между двумя последовательными обращениями TПО1 (фиг.1).
С учетом допустимого среднего количества обнаруженных отражений от пассивных помех при двух последовательных обращениях (количества траекторий, сформированных по отражениям от пассивных помех), из приведенной зависимости может быть определен минимальный интервал времени между обращениями к объекту при регулярном обзоре и в стробе подтверждения обнаружения объекта. Так, для допустимого количества ложных траекторий, формируемых по отражениям от пассивных помех, равным 5% от всего количества отражений, минимальный интервал времени обращения к объекту должен быть установлен около 0.1 с.
Дополнительные «быстрые» обращения к объекту в стробе подтверждения обнаружения объекта могут проводиться и при обнаружении объекта в стробе захвата траектории. При этом «быстрое» обращение к объекту, проводимое через интервал времени обращения к объекту ТПО2, меньший, чем интервал времени обращения к объекту в стробе подтверждения захвата траектории ТПЗ, позволяет: во-первых, значительно уменьшить количество ложных подтверждений захватов траектории; во-вторых, значительно ускорить процесс обнаружения траекторий (строб подтверждения обнаружения объекта при этом выполняет роль строба подтверждения захвата траектории), что особенно важно для выполнения задач обнаружения траектории высокоскоростных объектов.
При обращении к объекту через интервалы времени ТПОi, где i=1, 2 - номер строба подтверждения обнаружения объекта, i=1 соответствует ТПО1, i=2 соответствует ТПО2, размеры стробов захвата становятся равными:
- по дальности: 
- по угловым координатам: 
Из формул (3) и (4) следует, что при достаточно малых величинах TПО1 и ТПО2 обеспечиваются и небольшие стробы захвата и подтверждения траекторий высокоскоростных объектов.
Если предполагается сопровождать не самые высокоскоростные объекты, то может быть установлен несколько больший интервал времени обращения к объекту в стробе подтверждения обнаружения. При этом количество траекторий, формируемых по отражениям от пассивных помех (ложных траекторий), уменьшается. Допустимым диапазоном при выборе интервала времени обращения к объекту в стробах подтверждения обнаружения объекта TПО1 и ТПО2 можно считать 0.1-0.5 с.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - зависимость среднего количества обнаруживаемых отражений от метеообразований NT при двух последовательных обращениях к ним относительно общего количества отражений N0 от величины интервала времени между двумя последовательными обращениями TПО1.
Фиг.2 - блок-схема обзорной РЛС, реализующей заявляемый способ.
Обзорная радиолокационная станция, реализующая заявляемый способ, содержит (фиг.2) антенну 1, устройство управления лучом 2, выход которого соединен с антенной 1, последовательно соединенные передатчик 3, антенный переключатель 4, приемник 5 и вычислитель 6, а также синхронизатор 7, при этом сигнальный вход/выход антенны 1 соединен со входом/выходом антенного переключателя 4, а координатный ее выход - со вторым входом вычислителя 6, четыре выхода синхронизатора 7 соединены соответственно со входом устройства управления лучом 2, входом передатчика 3, вторым входом приемника 5 и с третьим входом вычислителя 6 (Монзинго Р.А., Миллер Т.У. Адаптивные антенные решетки. - Введение в теорию, пер с англ. - М.: Радио и связь, 1986, стр.19).
Указанная РЛС может быть выполнена на следующих функциональных элементах.
Антенна 1 - ФАР с двумерным электронным сканированием по углу места и азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: Сов. радио, 1977, с.138).
Устройство управления лучом 2 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: Сов. радио, 1977, с.141-143).
Передатчик 3 - многокаскадный импульсный передатчик на клистроне (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.278-279, рис.7.2).
Антенный переключатель 4 - балансный антенный переключатель на базе циркулятора (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.166-168).
Приемник 5 - супергетеродинный приемник (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.343-344, рис.8.1).
Вычислитель 6 - цифровой вычислитель. В вычислителе 6 реализуется известный способ обнаружения траектории объекта (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М.: Сов. радио, 1974, с.285-287).
Синхронизатор 7 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. М.: Сов. радио, 1970, с.602-603).
Рассмотрим работу обзорной РЛС (фиг.2), реализующей заявляемый способ при критерии обнаружения траектории объекта 2/2+1/2.
Скорость объекта полагаем не известной, т.е. объект может быть как не высокоскоростным, так и высокоскоростным.
Принимая допустимым среднее количество ложных траекторий, формируемых по отражениям от пассивных помех, на уровне 5% от всего количества отражений при регулярном обзоре, минимальный интервал времени обращения к объекту в стробе подтверждения обнаружения объекта TПО1 на основании зависимости фиг.1 установим равным 0.1 с. Таким же примем и допустимый уровень подтвержденных траекторий и соответствующее значение интервала времени обращения к объекту в стробе подтверждения обнаружения объекта ТПО2. Эти интервалы обеспечивают и относительно небольшие стробы захвата и стробы подтверждения захвата при обнаружении траекторий высокоскоростных объектов.
По команде от синхронизатора 7 в устройстве управления лучом 2 рассчитывается распределение состояний фазовращателей в полотне антенны 1 и луч антенны 1 устанавливается в заданном направлении зоны регулярного обзора. Сформированный в передатчике 3 высокочастотный зондирующий сигнал через антенный переключатель 4 подается в антенну и излучается. Отраженный сигнал принимается антенной 1, через антенный переключатель 4 поступает в приемник 5, где преобразуется на видеочастоту, и затем подается в вычислитель 6, где осуществляются операции по обработке поступающей информации при обнаружении траектории объекта.
Для каждого обнаруженного при регулярном обзоре отраженного сигнала рассчитываются границы строба подтверждения обнаружения объекта (в соответствии с формулами (3) и (4)) с центром в точке с координатами обнаруженного отраженного сигнала при регулярном осмотре зоны обзора. Через интервал времени обращения к объекту TПО1 указанный строб осматривается. Для чего сигналы, пропорциональные положениям луча в пределах рассчитанных границ строба, с выхода вычислителя 6 подаются в устройство управления лучом 2, и луч антенны последовательно устанавливается в указанные положения. По командам синхронизатора 7, подаваемым на передатчик 3, излучаются зондирующие сигналы. Отраженные сигналы принимаются антенной 1, поступают в приемник 5 и далее - в вычислитель 6.
В вычислителе 6 анализируется содержимое строба подтверждения обнаружения объекта. Если отраженный сигнал, обнаруженный при регулярном обзоре, обнаруживается и в стробе подтверждения обнаружения объекта, то он считается принадлежащим объекту и далее осуществляется обнаружение траектории объекта. В противном случае полагается, что отраженный сигнал принадлежит пассивным помехам, и обнаружение траектории прекращается.
Если положение объекта в пространстве с момента его обнаружения при регулярном обзоре, по оценкам его координат в стробе подтверждения обнаружения объекта, не изменилось, то объект считается не высокоскоростным и далее известным способом назначается строб захвата его траектории. Строб захвата траектории осматривается через интервал времени ТЗ. По полученным таким образом двум измерениям координат объекта определяются его скорость и направление движения. Производится экстраполяция положения объекта через интервал времени обращения к объекту ТПЗ. Рассчитывается положение границ строба подтверждения захвата и строб осматривается. Если в стробе подтверждения захвата траектории объект не обнаружен, то осуществляется еще одна экстраполяция положения объекта. Рассчитывается положение границ строба подтверждения захвата через интервал времени обращения к объекту ТПЗ и строб осматривается. Если в обоих стробах подтверждения захвата отраженные сигналы не обнаружены, то захват траектории считается не подтвержденным, траектория - не обнаруженной и процесс обнаружения траектории прекращается (критерий обнаружения траектории 2/2+1/2 не выполнился). Если же хотя бы в одном из стробов подтверждения захвата обнаружен отраженный сигнал, то захват траектории считается подтвержденным, а траектория - обнаруженной (критерий обнаружения траектории 2/2+1/2 выполнился).
Если положение объекта в стробе подтверждения обнаружения объекта отличается от его положения при регулярном обзоре, то объект считается высокоскоростным и по полученным двум измерениям определяется скорость и направление его движения. Т.е. в случае высокоскоростного объекта строб подтверждения обнаружения объекта выполняет роль строба захвата траектории.
Далее, как и при не высокоскоростном объекте, осуществляется экстраполяция его положения через интервал времени обращения к объекту в стробе подтверждения захвата ТПЗ, и процесс обнаружения траектории продолжается аналогично рассмотренному для не высокоскоростных объектов.
После обнаружения отраженного сигнала в стробе захвата может осуществляться дополнительное обращение к объекту в стробе подтверждения обнаружения объекта. При этом вычисляются его границы, и строб осматривается через интервал времени обращения к объекту ТПО2, меньший, чем интервал времени обращения к объекту в стробе подтверждения захвата траектории ТПЗ (например, TПО2=0.1 с). Ели в стробе подтверждения обнаружения объекта обнаружен отраженный сигнал, то он считается отраженным от объекта и захват траектории считается подтвержденным, а траектория обнаруженной (критерий обнаружения траектории 2/2+1/2 выполнился), в противном случае он считается отражением от пассивных помех. В последнем случае обнаружение траектории продолжается по известному способу, т.е. осуществляется еще n попыток обнаружения объекта в стробах подтверждения захвата траектории. Если хотя бы в одном из указанных стробов обнаружен отраженный сигнал, то захват траектории считается подтвержденным, а траектория - обнаруженной (критерий обнаружения траектории 2/2+1/2 выполнился), в противном случае - траектория считается не обнаруженной (критерий обнаружения траектории 2/2+1/2 не выполнился).
Таким образом, в обзорной РЛС, реализующей заявляемый способ, достигается уменьшение количества ложных траекторий, формируемых по отражениям от пассивных помех, а при обнаружении траекторий высокоскоростных объектов, кроме того, осуществляется значительное уменьшение размеров стробов захвата траекторий и уменьшение времени принятия решения об обнаружении траектории.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2427002C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2470318C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2011 |
|
RU2463622C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ В ВИДЕ СКОПЛЕНИЙ ОБНАРУЖЕННЫХ СИГНАЛОВ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2536182C2 |

Изобретение относится к области радиолокации и может быть использовано при обнаружении траекторий объектов в обзорных радиолокационных станциях (РЛС) с фазированной антенной решеткой. Техническим результатом является уменьшение количества ложных траекторий, формируемых по отражениям от пассивных помех. Способ обнаружения траектории объекта основан на дополнительном обращении к объекту в стробе подтверждения обнаружения объекта, строб назначается через малый интервал времени после обнаружения отраженного сигнала в регулярном обзоре, причем величина интервала выбирается значительно меньшей, чем интервал времени обращения к объекту в стробе захвата траектории, причем дополнительное «быстрое» обращение к объекту в стробе подтверждения обнаружения объекта позволяет: во-первых, значительно ускорить измерение скорости высокоскоростных объектов и достоверно осуществить экстраполяцию координат, что чрезвычайно важно для обеспечения эффективного поражения таких объектов на достаточно большой дальности, во-вторых, значительно уменьшить количество отражений от пассивных помех и уменьшить тем самым количество траекторий, формируемых по ним. 3 з.п. ф-лы, 2 ил.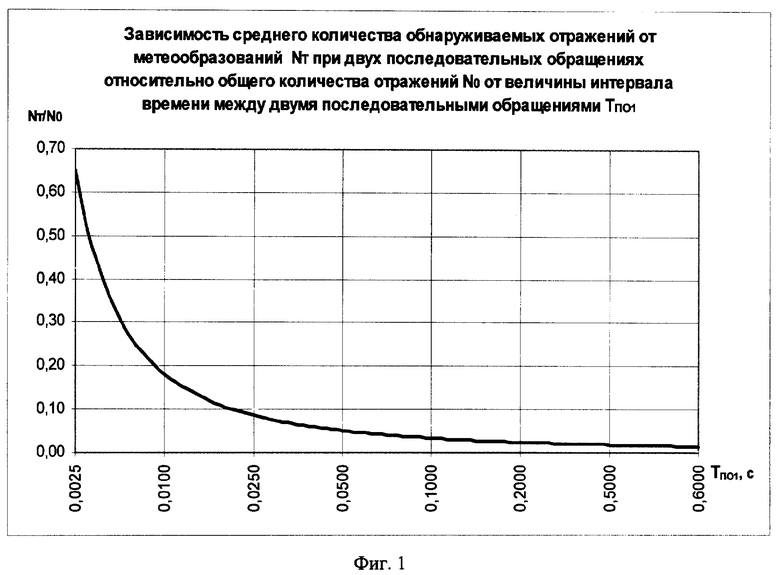
и/или после обнаружения отраженного сигнала в стробе захвата траектории дополнительно вычисляют границы строба подтверждения обнаружения объекта, осматривают его через интервал времени обращения к объекту Тпо2, меньший, чем интервал времени обращения к объекту в стробе подтверждения захвата траектории Тпз, при этом, если в стробе подтверждения обнаружения объекта обнаружен отраженный сигнал, то траектория считается обнаруженной, если же отраженный сигнал в стробе подтверждения обнаружения объекта не обнаружен, то производят оценку скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту Тпоз первого, второго, ..., n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе захвата траектории и в одном из n стробов подтверждения захвата траектории.
по дальности: ΔR=±(VRmaxTпоi+3σR),
где VR max - максимальная радиальная скорость объекта;
σR - среднеквадратическое отклонение измерения дальности R до объекта;
i=1, 2 - номер строба подтверждения обнаружения объекта, i=1 соответствует Tпо1, i=2 соответствует Тпо2;
по угловым координатам: 
где α - координата объекта по углу места или по азимуту;
σα - среднеквадратическое отклонение измерения угловой координаты объекта α;
Vα max - максимальная скорость объекта по угловой координате α.
| КУЗЬМИН С.З | |||
| Основы теории цифровой обработки радиолокационной информации | |||
| - М.: Советское радио, 1974, с.198-200 | |||
| УСТРОЙСТВО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1994 |
|
RU2079150C1 |
| СПОСОБ СЛЕЖЕНИЯ ЗА ПЕРЕМЕЩЕНИЕМ ПРОТЯЖЕННОГО ОБЪЕКТА | 1992 |
|
RU2078352C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОГО АВТОЗАХВАТА И АВТОСОПРОВОЖДЕНИЯ ДВИЖУЩИХСЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1992 |
|
RU2032916C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЭФФЕКТИВНОЙ ПЛОЩАДИ СИЛЬФОНОВ | 0 |
|
SU323688A1 |
| JP 2000155166 A, 06.06.2000 | |||
| JP 11287855 A, 19.10.1999. | |||

