Область техники, к которой относится изобретение
Настоящее изобретение относится к устройству для мониторинга одного или более хирургических параметров глаза.
Уровень техники по изобретению
Изобретение относится к области офтальмологии и, конкретно, к рефракционной диагностике глаза и хирургии глаза. В большинстве способов рефракционной коррекции глаза:
(1) определяется предоперационная диагностическая информация о глазе пациента для выбора адекватной процедуры (например, имплантация или лазер) и определения индивидуальных этапов лечения (например, где врезать или как выровнять имплантант),
(2) индивидуальное хирургическое лечение осуществляется вставлением корректирующих рефракцию имплантантов (например, интраокулярных линз (IOL), роговичных вкладышей) или выполнением хирургических действий (например, образование надрезов, формирование профиля поверхности лазером), и
(3) определяется послеоперационная диагностическая информация о глазе пациента, включающая в себя имплантационное и/или хирургическое действие.
(1) и (3) выполняются обычно за пределами операционного помещения, используя диагностические устройства, такие как кератометр, топограф, анализатор волнового фронта, Шеймфлюг-камера, интерферометр или щелевые лампы. (2) обычно выполняется в операционном помещении, используя хирургический микроскоп общего назначения и адекватные инструменты для поддержки вручную выполняемой хирургами работы (например, ножи, факомашина), или используя специальные устройства для частичной или полной автоматизации хирургических действий (например, рефракционная эксимерлазерная коррекция или лазерное лечение катаракты).
В настоящее время существует широкий спектр диагностических устройств, которые измеряют свойства глаза. Топограф или кератометр (например, Zeiss Atlas) определяет форму и кривизну роговицы пациента, анализатор волнового фронта (например, AMO Wavefront Sciences COAS) определяет полную рефракцию глазной оптики пациента, интерферометр (например, Haag-Streit LenStar LS900) измеряет осевую длину глазного яблока пациента, Шеймфлюг-камера (например, Oculus Pentacam) измеряет роговичную рефракцию с передней стороны и с задней стороны, а также толщину, и щелевая лампа обеспечивает изображение передней поверхности глаза пациента для ручного обследования доктором.
Все разные диагностические подходы и связанные с ними устройства развились в точные инструменты с высокой повторяемостью для единичных измерений глаза и поэтому применяются как в предоперационный, так и в послеоперационный период для обследования с целью подтверждения клинических результатов.
В области офтальмологии появляются дополнительные подходы применительно к интраоперационным измерениям глаза. Ручной инструмент для интраоперационной кератометрии (например, астигматическая линейка от STORZ) может быть использован для грубого измерения формы роговицы и ее изменений во время хирургической операции, интраоперационный анализатор формы волны (например, Wavetec ORange) позволяет, в принципе, определить требуемую оптическую силу и астигматизм искусственного хрусталика после удаления естественного хрусталика. Все инструменты для интраоперационного измерения рефракции обладают недостатком из-за момента осуществления измерения: момента хирургической операции глаза. Интраоперационные свойства глаза изменяются по сравнению с естественным состоянием без вмешательства хирургии. Внутриглазное давление может быть выше, роговица может быть деформирована в результате механического воздействия, рефракция текучей среды глаза изменяется вследствие частичного изменения текучей среды, и т.п. Но независимо от этого общего недостатка повторяемость показаний таких устройств в один момент на одном конкретном глазу приемлема.
Все вышеназванные устройства и инструменты имеют в наличии более или менее устойчивую применительно к устройству систему координат (“устойчивую применительно к устройству” означает, что инструмент или устройство обеспечивает устойчивый результат при измерении у пациента X в момент времени T множество раз), но все они нуждаются в устойчивой системе координат, охватывающей весь процесс (“устойчивой применительно к процессу”). При устойчивой применительно к процессу системе координат каждый этап процесса (измерение или лечение), в котором глаз пациента визуально доступен, может быть согласован и трансформирован в изначально определенную исходную систему координат.
Вследствие отсутствия устойчивой применительно к процессу системы координат систематические ошибки, которые возникают между разными этапами, непосредственно влияют на общую ошибку лечения. Приведем некоторые примеры.
a) Ошибка перехода от позиции к позиции. В существующей практике все диагностические измерения производятся, когда голова пациента находится в строго вертикальном положении. 99% хирургов предполагают, что сила притяжения удерживает глаз в точно ориентированном направлении во время каждого измерения. При этом может быть легко достигнуто сочетание результатов измерения от разных устройств. К сожалению, такое предположение неверно. Глаз может поворачиваться до 7° при переходе от одной позиции сидения к другой.
b) Ошибка маркера. В текущей практике используются краскопечатные маркеры или краскопечатные маркировочные инструменты для маркировки осей или положений на роговице или на краю лимба. Точность при использовании краскопечатных маркеров ограничена вследствие размера маркера (например, маркер может иметь толщину в 5°), неизвестности системы координат, когда хирург производит маркировку (см. п. a)), а также точности считывания маркера. Ошибки могут легко суммироваться, достигая 6° или более.
c) Ошибки хирургов. До сих пор, например, катаральные хирурги выполняют большинство этапов хирургической операции, требующих особой точности, вручную. Они располагают надрез или выравнивают имплантанты, основываясь на метках, которые они сделали заранее. Кроме ошибки маркера необходимо принять во внимание механическую точность движения пальцев хирурга.
d) Ошибка имплантанта. В зависимости от типа имплантанта могут возникать разные послеоперационные перемещения имплантанта. Например, ранние разработки торических IOL ориентируются на послеоперационное перемещение до 10°, основываясь на оценке щелевой лампы.
При выведении методических указаний, номограмм или новых разработок имплантантов и разработок инструментов из общих клинических результатов разделение влияния систематических ошибок подобно разделению по пунктам a)-d) не может быть определено или различено.
При высокой оптической сложности имплантантов самого последнего поколения или лазерных систем самого последнего поколения это требование большей диагностической и хирургической точности все равно присутствует, но с существующими инструментами могут быть определены только общие ошибки, а не адреса распространения ошибок на каждом отдельном диагностическом этапе или хирургическом этапе.
Сущность изобретения
С учетом вышеизложенной ситуации согласно одному варианту реализации обеспечена устойчивая применительно к процессу система координат. Каждый этап процесса (измерение или лечение), в котором глаз пациента визуально доступен, может быть согласован и трансформирован в изначально определенную исходную систему координат. Это преодолевает недостатки отсутствия системы координат когерентного процесса по многим сеансам, которые могут содержать предоперационные, операционные и послеоперационные процедуры.
Согласно одному варианту реализации обеспечено устройство для мониторинга одного или более хирургических параметров глаза пациента по многим сеансам, которые разнесены во времени и между которыми глаз пациента может совершать перемещение, и этот устройство содержит:
камеру для получения одного или более изображений глаза;
модуль для определения во время первого сеанса упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат, основываясь на полученном упомянутой камерой изображении, в первой системе координат;
модуль для определения во время второго сеанса, разнесенного во времени относительно упомянутого первого сеанса, упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат, основываясь на полученном упомянутой камерой изображении, во второй системе координат;
модуль для определения перемещения глаза по шести степеням свободы между упомянутым первым и упомянутым вторым сеансами и для определения преобразования координат, основываясь на этом;
модуль для преобразования, основываясь на упомянутом определенном перемещении глаза, упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат из упомянутой первой системы координат в упомянутую вторую систему координат;
модуль для количественного определения и/или визуализации изменения упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат между упомянутым первым и упомянутым вторым сеансами, основываясь на упомянутом хирургическом параметре глаза и его координатах, измеренных во время упомянутого второго сеанса, и упомянутом преобразованном хирургическом параметре глаза и его координатах, измеренных во время упомянутого первого сеанса, при этом упомянутые хирургические параметры глаза представляют собой один или более из следующих:
относящиеся к имплантанту параметры глаза, которые основаны на имплантанте, хирургически вставленном в глаз пациента, или
положение и/или контур роговицы или лимба, или склеральных надрезов.
Такое построение позволяет осуществлять мониторинг хирургических параметров даже после выполнения хирургической операции, чтобы проверить, не произошло ли какое-либо изменение во времени хирургических параметров, таких как относящиеся к имплантанту параметры глаза или же положение или контур надрезов. Это важная диагностическая информация для мониторинга успешности или неудачи хирургической операции в послеоперационный период.
Согласно одному варианту реализации упомянутый относящийся к имплантанту параметр глаза содержит одно или более из перечисленного:
ориентацию и/или положение имплантанта в глазу;
положение и/или контур разрыва;
перекрытие разрыва с контуром имплантанта.
Это предпочтительные примеры относящихся к имплантанту параметров, которые представляют интерес для их мониторинга с целью наблюдения за результатом хирургической операции во времени.
Согласно одному варианту реализации упомянутый модуль для количественного определения и/или отображения изменения упомянутого, по меньшей мере одного, хирургического параметра глаза содержит:
модуль для отображения упомянутого, по меньшей мере одного, хирургического параметра глаза, измеренного во время упомянутого второго сеанса, и упомянутого преобразованного хирургического параметра глаза, измеренного во время упомянутого первого сеанса, в изображении глаза, полученном во время упомянутого второго сеанса; и/или
модуль для вычисления разности между упомянутым хирургическим параметром глаза, измеренным во время упомянутого второго сеанса, и упомянутым преобразованным хирургическим параметром глаза, измеренным во время упомянутого первого сеанса, и для визуализации упомянутой разности в упомянутом изображении глаза, полученном во время упомянутого второго сеанса.
Это позволяет производить сравнение развития хирургического параметра глаза во времени, например, сравнивая послеоперационное изменение с ситуацией во время хирургической операции или сравнивая два разных послеоперационных момента времени, когда компенсируется перемещение глаза между двумя измерениями. Хирургический параметр (такой как положение имплантанта), определенный в эти два момента времени, может наблюдаться непосредственно путем отображения его в изображении с компенсированным перемещением глаза, или может быть вычислена разность (такая как разность параметров x-, y- или поворота), и эта разность воспроизводится на дисплее в изображении.
Согласно одному варианту реализации упомянутый первый сеанс является предоперационным сеансом, а упомянутый второй сеанс является интраоперационным сеансом или послеоперационным сеансом, или
упомянутый первый сеанс является интраоперационным сеансом, а упомянутый второй сеанс является послеоперационным сеансом, или
упомянутый первый сеанс является послеоперационным сеансом, а упомянутый второй сеанс является другим послеоперационным сеансом, выполняемым позже.
Это подходящие примеры сеансов в разные моменты времени, для которых хирургические параметры могут сравниваться при компенсации перемещения глаза между сеансами.
Согласно одному варианту реализации устройство дополнительно содержит:
модуль для измерения и регистрации упомянутого, по меньшей мере одного, хирургического параметра глаза на протяжении многих сеансов с течением времени, чтобы регистрировать изменение упомянутого, по меньшей мере одного, хирургического параметра глаза во времени.
Это позволяет регистрировать и осуществлять мониторинг развития хирургических параметров глаза и тем самым результата хирургической операции в течение произвольно продолжительного периода времени в устойчивой системе координат, компенсируя перемещение глаза. Таким образом, например, могут производиться исследования, относящиеся к долгосрочному успеху или неудаче хирургической операции, которые до сего времени были невозможны.
Согласно одному варианту реализации устройство дополнительно содержит:
осветительное устройство для освещения глаза световой картиной в форме кольца для генерации отражений от роговицы, причем упомянутое осветительное устройство предпочтительно располагается таким образом, чтобы ось кольца совпадала с оптической осью камеры;
модуль для определения во время упомянутого первого и/или упомянутого второго сеанса положения отражений от роговицы в изображении глаза;
модуль для определения во время упомянутого первого и/или упомянутого второго сеанса, основываясь на упомянутом определенном положении отражений от роговицы, по меньшей мере одного, дополнительного параметра глаза и его координат в упомянутой первой и/или второй системе координат, основанной на геометрической модели, представляющей глаз как сферическое глазное яблоко, имеющее наложенную на него роговицу сферической формы;
модуль для визуализации упомянутого, по меньшей мере одного, дополнительного параметра глаза вместе с упомянутым, по меньшей мере одним, относящимся к имплантанту параметром глаза в одном и том же изображении после преобразования его координат, основываясь на перемещении глаза между упомянутым первым и упомянутым вторым сеансами, так что перемещение глаза компенсируется.
Таким образом, дополнительные параметры глаза, которые не являются хирургическими параметрами глаза, могут быть определены и подвергнуты мониторингу в добавление к хирургическим параметрам. Они могут быть также визуализированы дополнительно вместе с хирургическими параметрами с компенсацией перемещения глаза между сеансами.
Согласно одному варианту реализации упомянутый, по меньшей мере один, дополнительный параметр определяется на основе модели глаза, которая представляет форму и положение глаза в виде сферического глазного яблока и роговицы, наложенной на него и имеющей сферическую форму или форму эллипсоида, что тем самым позволяет производить вычисление упомянутого, по меньшей мере одного, дополнительного параметра, используя измеренное положение упомянутых отражений от роговицы и упомянутую модель глаза.
Это подходящий способ определения параметров глаза, которые не могут быть непосредственно измерены из изображений, полученных камерой.
Согласно одному варианту реализации упомянутый, по меньшей мере один, дополнительный параметр глаза содержит одно или более из перечисленного:
a) k-показания, которые определяют форму роговицы в терминах параметров эллипсоида вращения;
b) линию взгляда (визирования) как линию, соединяющую центр зрачка и точку фиксации в известном положении;
c) глубину камеры роговицы;
d) зрительную ось глаза;
e) определение того, является ли глаз левым глазом или правым глазом.
Это подходящие примеры дополнительных параметров глаза.
Согласно одному варианту реализации упомянутый, по меньшей мере один, дополнительный параметр глаза содержит k-показания, которые измеряются определением эллипса, наиболее совпадающего с отражениями от роговицы, и определением главной оси, малой оси и ориентации этого эллипса.
Это позволят определить параметры астигматизма, включая сюда длину осей укручения и плоской части роговицы, а также ориентацию астигматизма. Диаметр наиболее совпадающей с роговицей сферы может быть аппроксимирован посредством осей ее плоской части и укручения.
Согласно одному варианту реализации упомянутое устройство дополнительно содержит точку фиксации на известных координатах, предпочтительно на оптической оси камеры, и упомянутый, по меньшей мере один, дополнительный параметр глаза содержит зрительную ось, которая определяется как вектор, соединяющий центр роговицы и известную точку фиксации, причем центр роговицы определяется на основе положения отражений от роговицы.
Это позволяет определить зрительную ось.
Согласно одному варианту реализации упомянутый, по меньшей мере один, дополнительный параметр глаза содержит угол каппа между зрительной осью и зрачковой осью, или
упомянутый дополнительный параметр является точкой пересечения между зрительной осью и поверхностью роговицы, причем радиус роговицы определяется на основе положения упомянутых отражений от роговицы.
Это позволяет определять дополнительные параметры, которые представляют интерес для хирурга.
Согласно одному варианту реализации упомянутый, по меньшей мере один, дополнительный параметр глаза содержит глубину передней камеры глаза, которая определяется на основе определения радиуса Rl лимба и исходя из предположения, что он является широтным кругом на наиболее совпадающей с роговицей сфере с радиусом Rc, который определяется на основе отражений света от роговицы, так что глубина камеры роговицы CD выводится по формуле:
CD=Rc-sqrt(Rc∧2-Rl∧2), где sqrt - квадратный корень.
Глубина передней камеры является информацией, представляющей интерес для хирурга.
Согласно одному варианту реализации упомянутый, по меньшей мере один, дополнительный параметр глаза содержит линию взгляда, которая определяется как вектор, соединяющий центр зрачка и упомянутую точку фиксации в известном положении, при этом координата Z центра зрачка определяется на основе известного расстояния между камерой и глазом, а координаты X и Y зрачка определяются на основе измеренного положения зрачка в изображении, и/или
упомянутый, по меньшей мере один, дополнительный параметр глаза содержит зрачковую ось, являющуюся линией, идущей через центр зрачка, будучи ортогональной по отношению к поверхности роговицы.
Линия взгляда и зрачковая ось могут быть определены таким образом.
Согласно одному варианту реализации упомянутый, по меньшей мере один, дополнительный параметр глаза содержит определение того, располагается ли центр лимба или центр роговицы ближе к оптической оси камеры, когда пациент фиксируется на известной точке фиксации, лежащей на оптической оси камеры.
Это позволяет определить, является ли глаз левым глазом или правым глазом. Это может быть использовано в качестве защитного механизма для предотвращения проведения хирургической операции или диагностики на неправильно выбранном глазу.
Согласно одному варианту реализации устройство дополнительно содержит:
модуль для визуализации произвольного сочетания упомянутых, по меньшей мере одного или более, хирургических параметров глаза и упомянутых, по меньшей мере одного или более, дополнительных параметров глаза, определенных во время упомянутого первого сеанса, и, возможно, другого произвольного сочетания упомянутых, по меньшей мере одного или более, хирургических параметров глаза и упомянутых, по меньшей мере одного или более, дополнительных параметров глаза, определенных во время упомянутого второго сеанса, в одном и том же изображении, с тем чтобы перемещение глаза между упомянутыми первым и вторым сеансами было компенсировано.
Это обеспечивает возможность визуализации любых хирургических или других параметров в любом сочетании, которое представляет интерес, с компенсацией перемещения глаза между разными сеансами.
Описание чертежей
На фиг. 1-15 представлены варианты реализации изобретения.
Подробное описание
Согласно одному варианту реализации обеспечено устройство, которое предлагает решение для мониторинга во времени свойств глаза, относящихся к глазной хирургии, между любыми двумя следующими периодами:
- до операции;
- во время операции;
- после операции.
В последующем описании пространственные и рефракционные свойства глаза будут именоваться “параметрами глаза”.
Для интраоперационных измерений решение, соответствующее одному варианту реализации, требует камеру для микроскопа, подсоединяемую к персональному компьютеру.
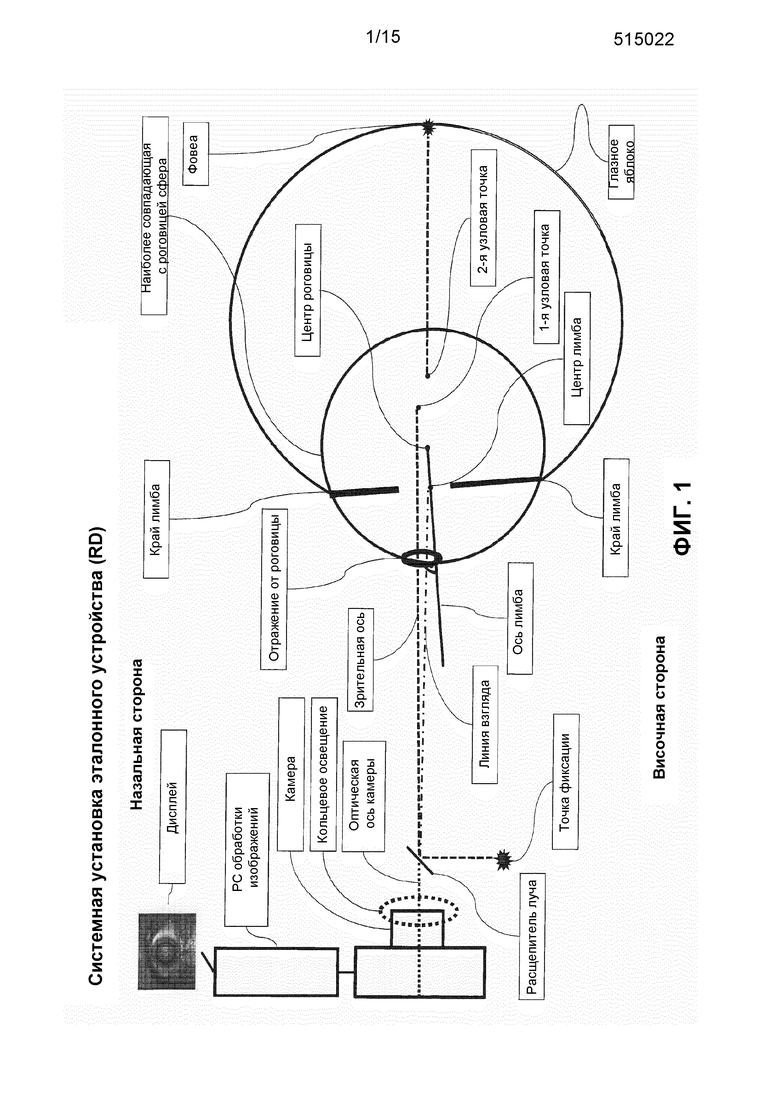
Для предоперационных и послеоперационных измерений согласно одному варианту реализации описываемое здесь решение использует специальное устройство, называемое здесь “эталонным устройством” (RD), которое состоит из персонального компьютера (PC), подсоединенного к цифровой камере, и осветительной системы на столе поперечного перемещения, что позволяет получать обладающее высокой разрешающей способностью цветное изображение глаза пациента в определенном положении. Устройство, соответствующее одному варианту реализации, и его использование применительно к глазу, схематически представлены на фиг. 1.
Осветительная система RD генерирует световую картину в форме кольца и может, например, состоять из концентрического кольца светодиодов (LED) вокруг оптической оси камеры и фиксирующего LED, который установлен на оптическую ось камеры. Предпочтительно ось кольца LED совпадает с оптической осью камеры, и оптическая ось камеры ортогональна по отношению к плоскости кольца.
Получаемые изображения обрабатываются на PC и могут использоваться для автоматического или ручного измерения любых абсолютных значений параметров глаза, какими они являются в момент получения изображения, или изменений параметров глаза относительно исходного изображения в предыдущем сеансе измерения.
Согласно одному варианту реализации устройство обеспечивает возможность определения пространственного соотношения между измеряемыми параметрами во время и между сеансами измерения путем активного измерения того, как глаз перемещался по шести степеням свободы между двумя сеансами измерения.
Перемещение глаза по шести степеням свободы согласно одному варианту реализации измерялось на основе регистрации свойств склеральных кровеносных сосудов или свойств лимба, радужной оболочки глаза и отражений от роговицы, определяемых осветительной системой, между двумя сеансами.
Одно начальное (обычно предоперационное, но допустимо также и послеоперационное) эталонное измерение служит в качестве эталонной системы координат для всех последующих сеансов измерения (предоперационных или послеоперационных) того же глаза.
Все параметры, измеряемые в последующих сеансах, могут быть преобразованы в эталонную (или наоборот) систему координат применением преобразования пространственного подобия, которое отсчитывает перемещение глаза между текущим измерением и эталонным измерением. Будучи преобразованными в эталонную систему координат, параметры от разных измерений могут сравниваться, и влияние перемещения глаза исключается.
Такой подход используется в одном варианте реализации для анализа параметров, таких как положение и ориентация имплантанта (например, IOL) в глазу. При этом может осуществляться мониторинг того, насколько устойчивыми являются его положение и ориентация в глазу с течением времени, без ограничения точности применительно к величине перемещения глаза между сеансами измерения.
Типичные параметры глаза, которые могут измеряться c использованием RD в предоперационном эталонном сеансе измерения, перечислены ниже.
1) Положение, форма и размер зрачка (фотопический, скотопический, мезопический).
2) Положение и размер лимба.
3) k-показания.
4) Линия взгляда (LOS).
5) Аппроксимация глубины камеры роговицы.
6) Пересечение LOS с поверхностью роговицы и угол каппа.
7) Классификация OD/OS.
Эти параметры глаза могут быть измерены в предоперационном сеансе и затем позднее в интраоперационном или послеоперационном сеансе, и их изменение или развитие во времени может быть затем определено и визуализировано.
Перемещение глаза, которое затем позволяет осуществить преобразование параметров глаза от одного сеанса в другой согласно одному варианту реализации, определяется измерением перечисленного ниже.
8) Относительное перемещение глаза по отношению к эталонному измерению путем измерения:
a) относительного смещения по X и Y;
b) относительного смещения по Z;
c) относительной циклодукции (вокруг оси Z);
d) относительного поворота и наклона (вокруг осей X и Y).
Могут быть также измерены другие параметры, которые относятся к офтальмологической хирургии и размещению имплантантов.
В (последующем) интраоперационном или послеоперационном сеансе измерения могут быть измерены перечисленные ниже параметры глаза в добавление к вышеупомянутым параметрам глаза (или вместо них).
9) Ориентация и положение имплантантов в глазу:
a) положение маркировочных меток для имплантантов в глазу (торические метки или мультифокальные кольца);
b) угловая ориентация имплантантов;
c) поворот и наклон имплантантов;
d) контур имплантанта;
e) положение центра имплантанта по осям X и Y;
f) положение гаптических элементов имплантанта в глазу.
Кроме того, могут быть измерены другие типы параметров, которые также относятся к имплантантам, а именно:
10) Разрыв в капсуларном мешке, и конкретно:
a) контур;
b) диаметр;
c) положение по осям X и Y в глазу;
d) перекрытие с линзой.
В альтернативном варианте RD содержит дополнительную Шеймпфлюг-камеру или интерферометрическую установку, которая позволяет производить измерения внутри ткани роговицы и хрусталика. В такой установке в дополнение к упомянутым выше параметрам могут измеряться надрезы роговицы касательно их положения в глазу, ширины и глубины, а также расстояние имплантанта по отношению к роговице.
Во втором альтернативном варианте RD содержит также осветительный диск Плацидо, который позволяет анализировать топографию роговицы. В такой установке могут быть оценены точные изменения в топографии роговицы, например, до и после применения лазерного лечения LASIK. Применяя преобразование пространственного подобия к топографическим данным, можно обеспечить, что топографические данные будут корректно выровнены и изменения в топографии роговицы будут правильно вычислены.
В третьем альтернативном варианте RD содержит также анализатор волнового фронта (Hartman-Shack-датчик), который позволяет анализировать полную рефракцию глаза.
Еще в одном альтернативном варианте регистрация изображения от RD передается другим специальным устройствам диагностики глаза, что позволяет преобразовывать выделенные параметры, измеренные этими устройствами, в эталонную систему координат, обеспеченную RD. В этом варианте изменения этих дополнительных пространственных параметров глаза могут также контролироваться во времени в устойчивой эталонной системе координат, обеспеченной RD.
В следующих вариантах реализации устройство, соответствующее изобретению (эталонное устройство), будет описано и будут объяснены его принцип действия и функции.
Основными функциональными возможностями устройства согласно одному варианту реализации являются следующие:
- измерение многих параметров глаза или рядов параметров в разных сеансах измерения;
- определение перемещения глаза между сеансами измерения;
- применение преобразования пространственного подобия к преобразованию каждого параметра глаза или ряда параметров в эталонную систему координат, определяемую первоначальным эталонным измерением;
- количественное определение и отображение изменений в параметрах глаза или ряде параметров глаза между сеансами предоперационных, интраоперационных и послеоперационных измерений;
- количественное определение и отображение разностей между хирургическим планом и послеоперационным результатом.
Параметры глаза в одном варианте реализации измеряются сочетанием обработки изображения с типовой моделью глаза. Например, согласно одному варианту реализации модель представляет глазное яблоко в виде сферы, при этом роговица, являющаяся тоже сферической (или в одном варианте реализации она имеет форму эллипсоида), наложена на него. Использование такой модели глаза позволяет косвенно измерять свойства, такие как глубина камеры роговицы, которая непосредственно не видна в изображении.
Теперь будет пояснено, как в соответствии с вариантами реализации определяются параметры глаза, которые затем могут быть трансформированы из одного сеанса в другой, используя обнаруженное перемещение глаза.
1) Положение, форма и размер зрачка (фотопический, скотопический или мезопический)
Обнаружение свойств зрачка является классической задачей обработки изображения. Здесь используется классический подход, основанный на пороговом значении. Путем изменения интенсивности освещения зрачок пациента может быть помещен в условия фотопического, скотопического или мезопического зрения (изменения размера зрачка).
2) Положение, форма и размер лимба
Как и в случае обнаружения свойств зрачка, здесь используется стандартный подход, основанный на обнаружении края лимба и круговой подгонке.
3) k-показания
k-показания определяют форму роговицы в терминах параметров эллипсоида вращения, таких как малая ось (ось укручения в офтальмологии), главная ось (ось плоской части в офтальмологии) и ориентация осей. Кроме того, здесь в одном варианте реализации применяется хорошо известный кератометрический подход, заключающийся в обнаружении отражений от роговицы излучения коаксиального кольца LED в RD. Наиболее соответствующий по форме этим отражениям эллипс дает параметры k-показаний.
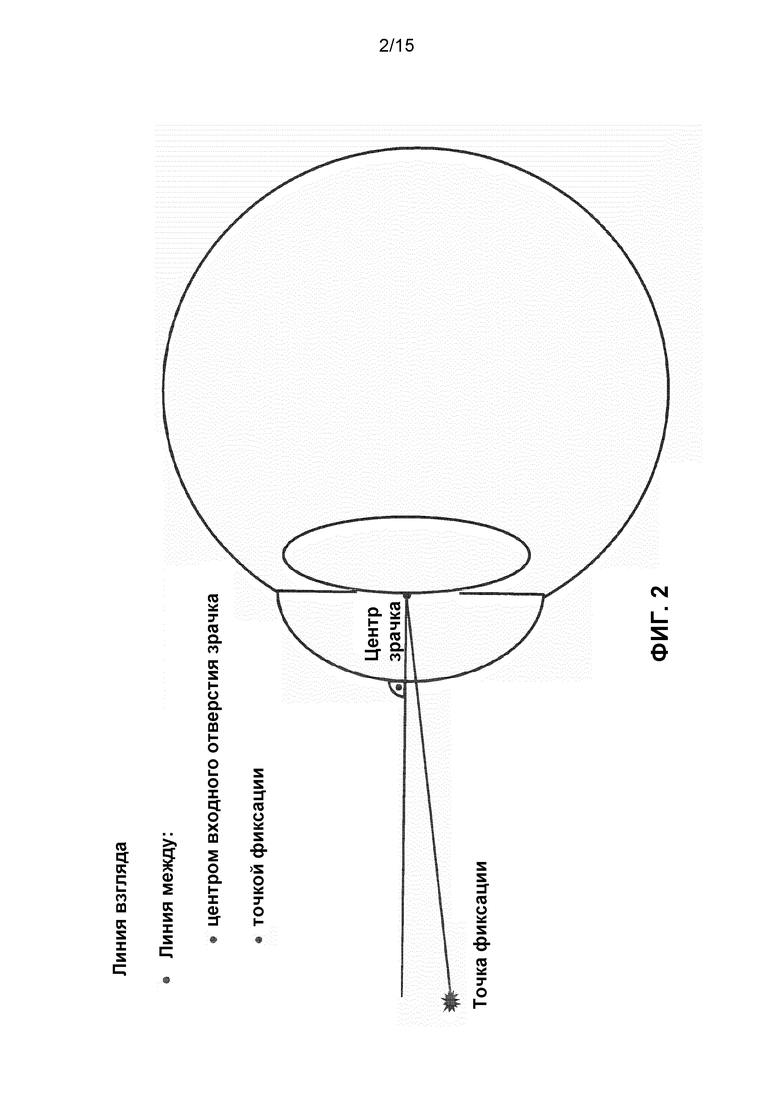
4) Линия взгляда (визирования) (LOS)
Линия взгляда соединяет точку фиксации с центром входного отверстия зрачка глаза. RD получает изображение с определенного расстояния Zp до глаза. Согласно проекту геометрия камеры для формирования изображений известна, так же как положение точки фиксации по отношению к центру проекции камеры. Поэтому зрачок может измеряться в 3 измерениях с его координатами Xp, Yp и Zp. 3D вектор, соединяющий входное отверстие зрачка и точку фиксации, определяет LOS. Это схематически представлено на фиг. 2.
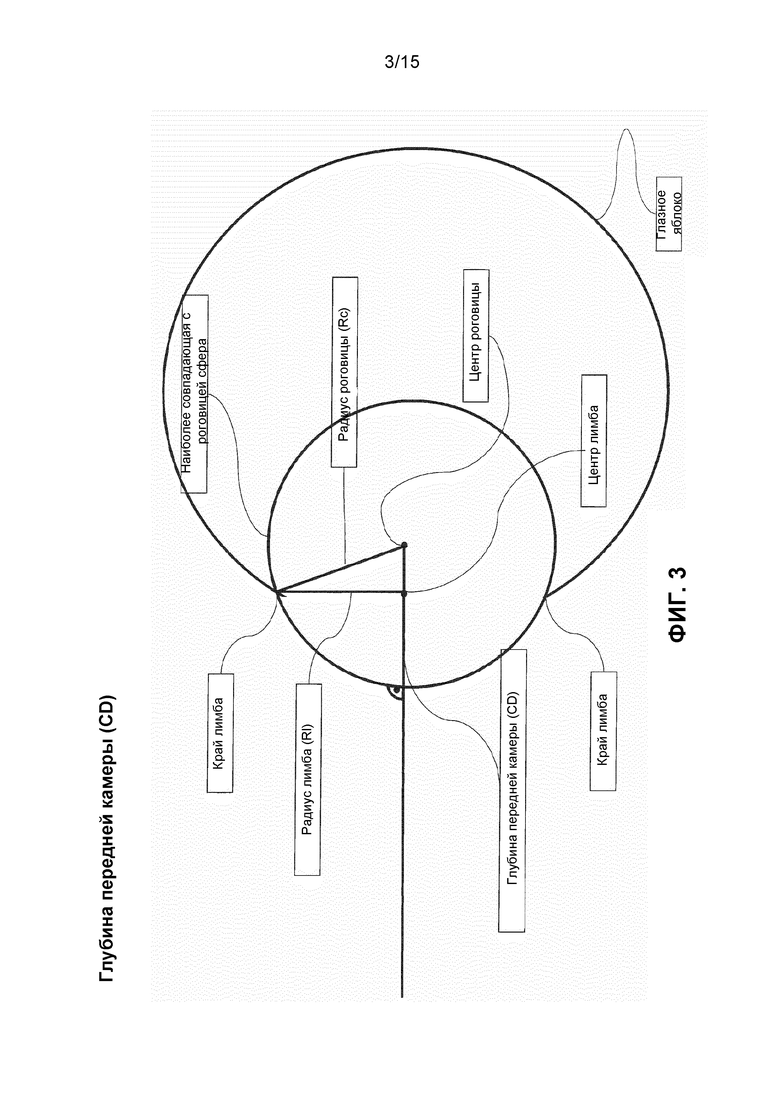
5) Аппроксимация глубины камеры роговицы
Радиус Rc сферы, наиболее совпадающей с поверхностью роговицы, является средним значением осей плоской части и укручения, которые определяются из k-показаний. Исходя из предположения, что лимб с радиусом Rl является широтным кругом на наиболее совпадающей с роговицей сфере с радиусом Rc, аппроксимация глубины камеры (CD) роговицы может быть выведена по формуле CD=Rc-sqrt(Rc∧2-Rl∧2), где sqrt - квадратный корень. Это схематически представлено на фиг. 3.
6) Пересечение LOS или зрительной оси с поверхностью роговицы
Это пересечение является действительной точкой отсчета для имплантации роговичных вкладок и для центрирования лазерной обработки. Оно может быть аппроксимировано пересечением наиболее совпадающей с роговицей сферы с LOS.
Поперечные координаты центра этой сферы, Xc и Yc, хорошо аппроксимируются центром отражений излучения кольца LED от роговицы. Координата Z центра сферы определяется выражением Zc=Zp-CD+Rc.
Используя простую векторную алгебру, может быть вычислено пересечение между LOS и сферой, определяемой ее центром [Xc, Yc, Zc] и ее радиусом Rc.
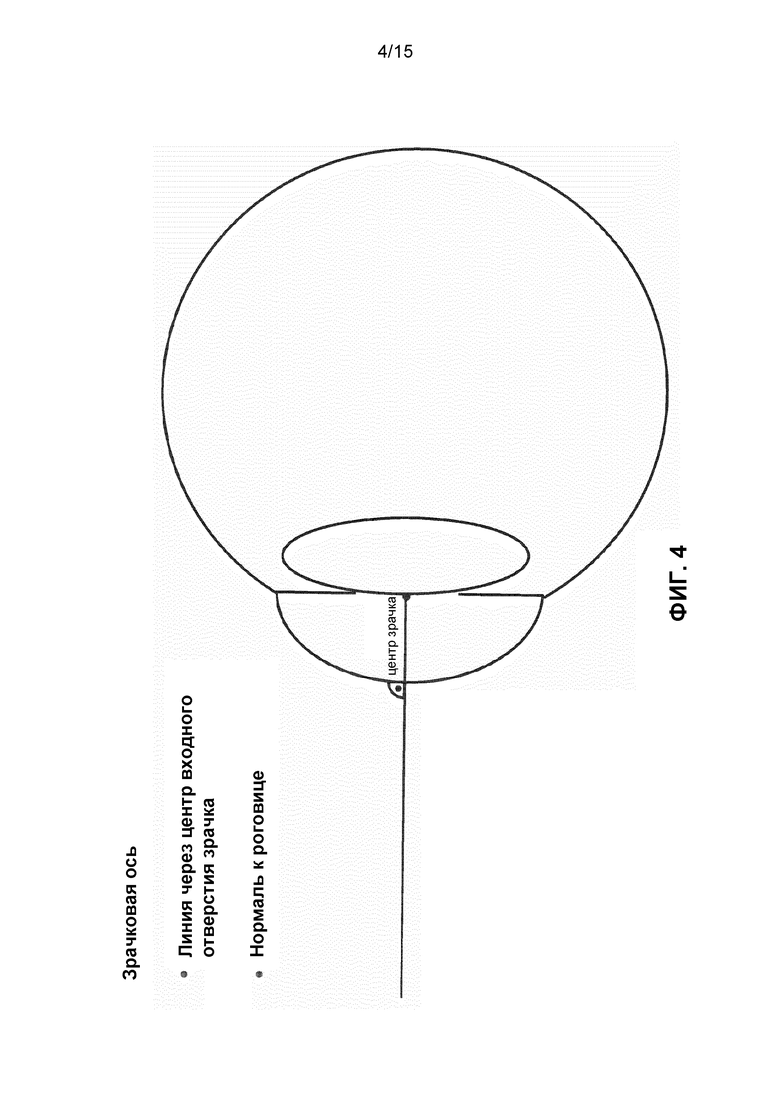
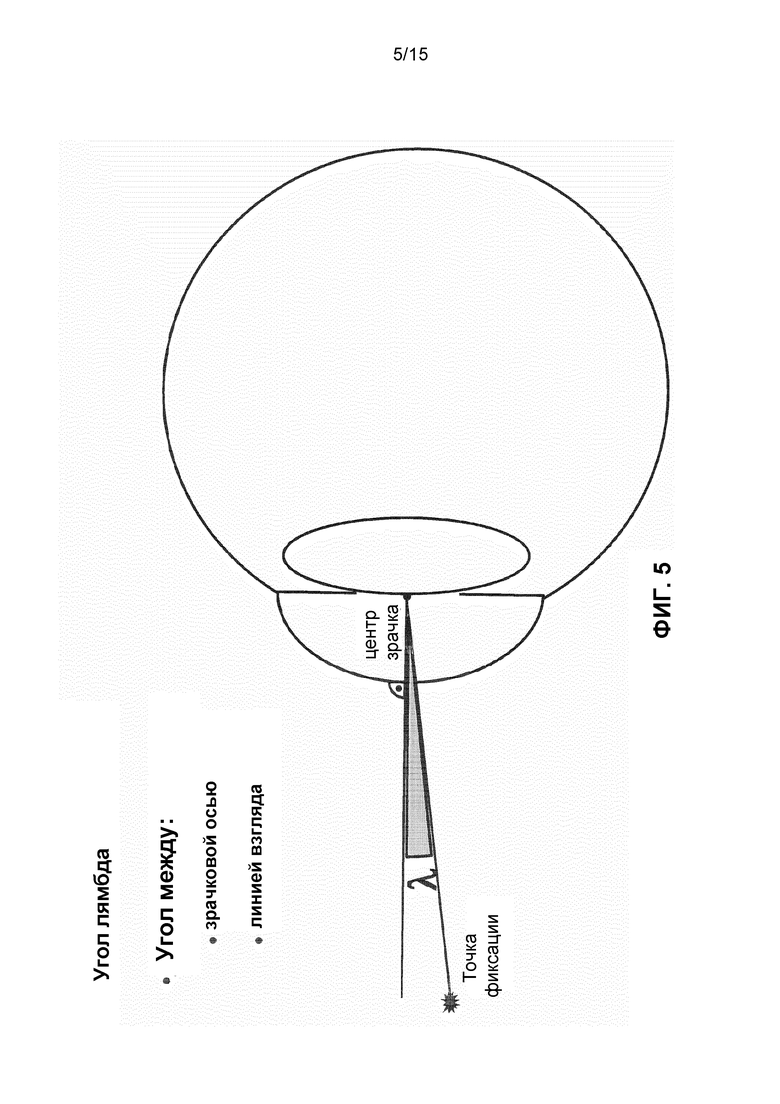
Косвенным образом это пересечение является также представлением часто упоминаемого угла каппа или лямбда. В литературе углом каппа называется угол между зрительной осью (VA - см. определение в разделе ниже) и зрачковой осью (PA), соединяющей центр [Xp, Yp, Zp] зрачка с центром [Xc, Yc, Zc] роговицы. Поэтому PA является нормалью к поверхности роговицы. Это и определение этого иллюстрируется на фиг. 4. Определение PA в одном варианте реализации может происходить в следующем порядке:
1. Обнаружение центра зрачка в изображении, чтобы определить координаты XY.
2. Обнаружение отражений от роговицы (CR).
3. Вычисление координат XYZ центра роговицы и радиуса роговицы из CR.
4. Обнаружение размера лимба в изображении.
5. Использование размера лимба и радиуса роговицы для вычисления глубины передней камеры глаза.
6. Использование глубины передней камеры глаза и координат XYZ центра роговицы для вычисления координаты Z зрачка.
7. PA является вектором через XYZ зрачка и центр XYZ роговицы.
Поскольку объективное измерение VA не является тривиальным, часто вместо этого используется LOS, измерение которой уже было описано выше. Угол между PA и LOS называется в литературе углом лямбда (см. фиг. 5). На практике термины лямбда и каппа равнозначны (с точностью до 0,2°).
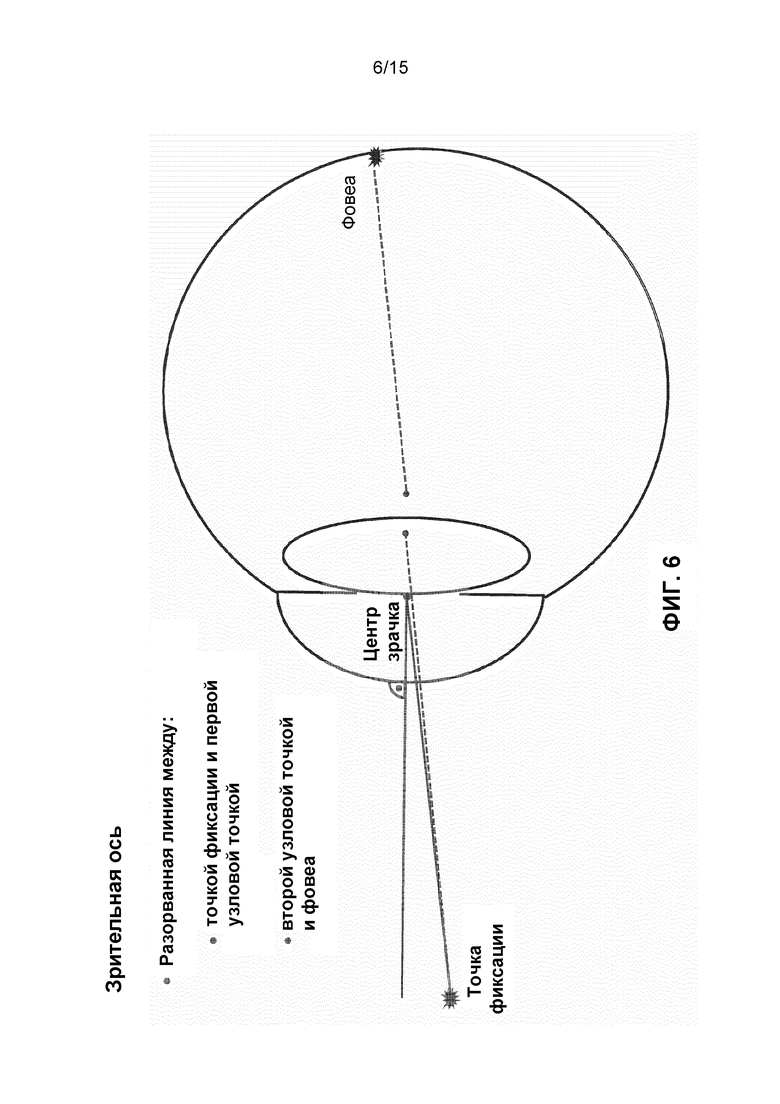
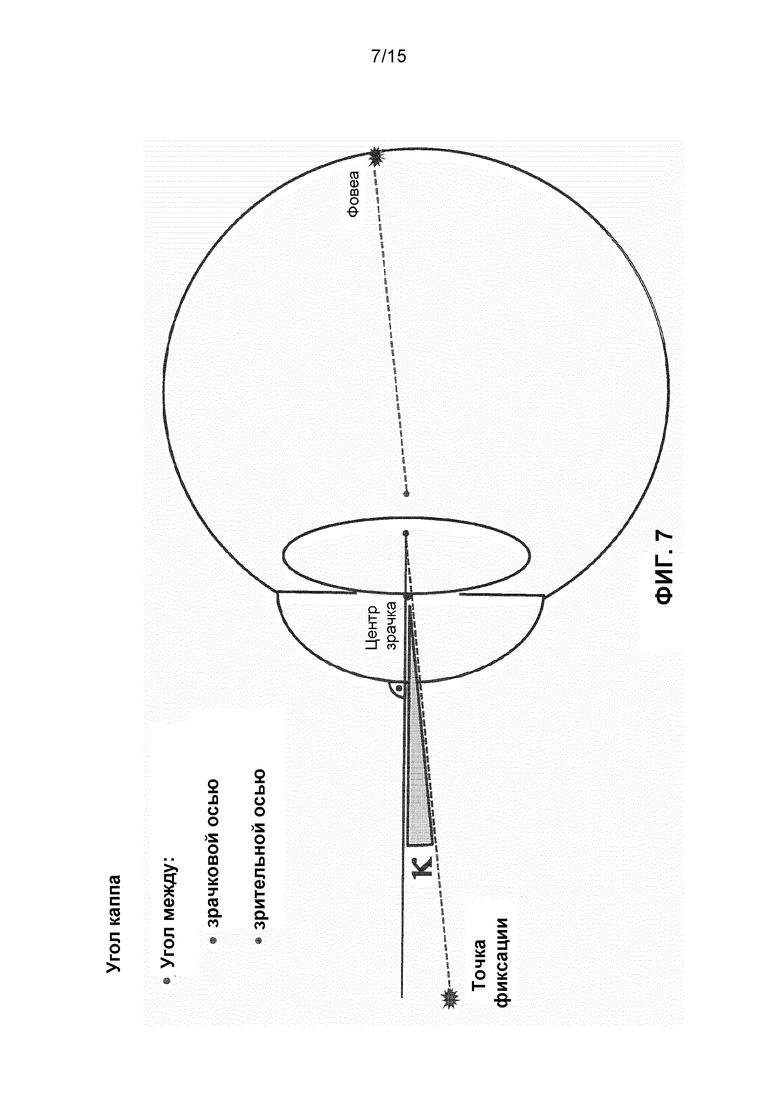
Однако в соответствии с одним вариантом реализации может быть определена действительная зрительная ось. С этой целью в одном варианте реализации предполагается, что центр роговицы совпадает с первой узловой точкой. Затем зрительная ось может быть определена как линия, соединяющая точку фиксации и центр роговицы. Это иллюстрируется на фиг. 6. Затем на фиг. 7 представлено определение угла каппа. В одном варианте реализации определение может осуществляться, проходя через следующие этапы:
1. Обнаружение отражений от роговицы.
2. Вычисление координат XYZ центра роговицы и радиуса роговицы по CR.
3. Использование моделирующего предположения, что центр роговицы совпадает с 1-й узловой точкой.
4. Использование данных координат XYZ точки фиксации.
5. VA является вектором, проходящим через 1-ю узловую точку XYZ и точку XYZ фиксации.
7) Классификация OD/OS
Другим параметром, который может быть выведен из изображения, полученного с помощью RD, является определение того, показывает ли изображение левый или правый глаз. Этот параметр представляет интерес скорее для потребительских целей и предотвращения грубой ошибки.
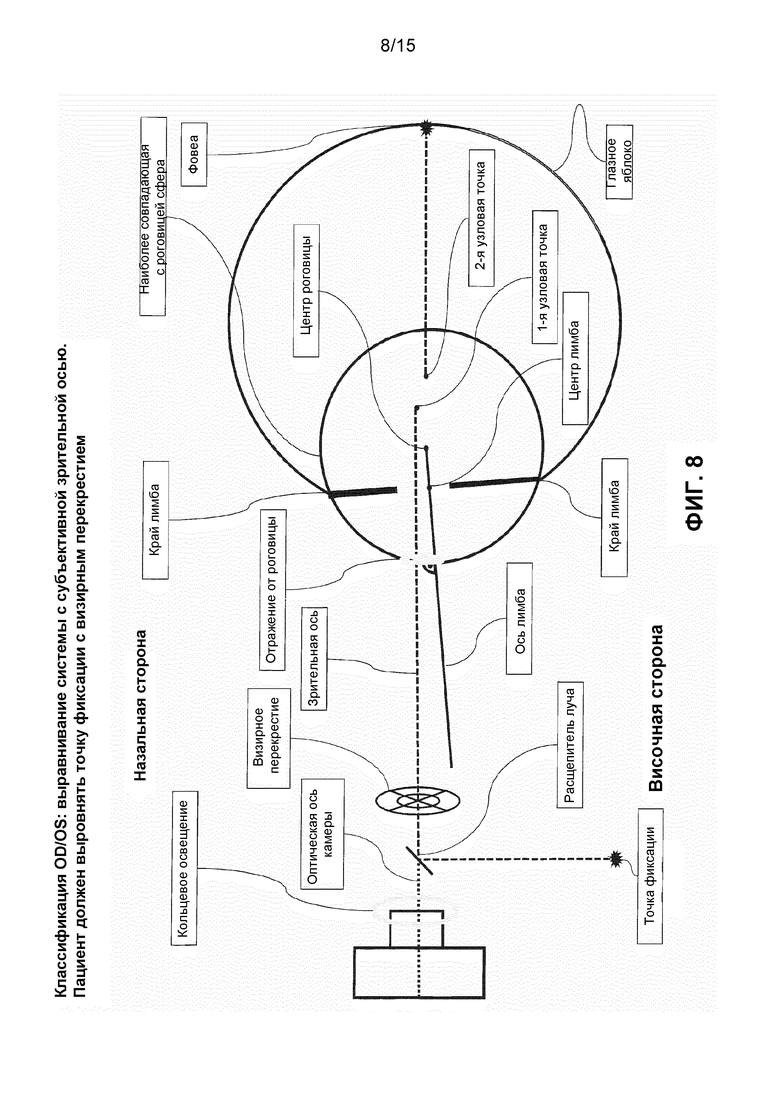
Хорошо известно из литературы, что зрительная ось (VA) (луч света, который связывает точку фиксации с фовеа сетчатки глаза через узловые точки глаза) имеет наклон в направлении назальной стороны по сравнению с оптической осью глаза (OAE) (см. изображение ниже). Угол между OAE и VA называется в литературе углом ALPHA и имеет величину около 5°.
OAE является наилучшим образом совпадающей линией, проходящей через центры кривизны сфер, наиболее совпадающих с преломляющими поверхностям глаза. Преломляющими поверхностями являются передняя и задняя поверхности роговицы, и передняя и задняя поверхности хрусталика.
Центрируя глаз пациента в изображении на камере и попросив пациента зафиксироваться на цели, можно обеспечить примерное выравнивание зрительной оси (VA) пациента c оптической осью камеры (OAC). В результате OAE имеет угол наклона около 5° по отношению к OAC.
Центр отражения (отражений) от роговицы совпадает с очень хорошим приближением с положением центра роговицы в изображении, который, по определению, лежит на OAE или очень близко к OAE.
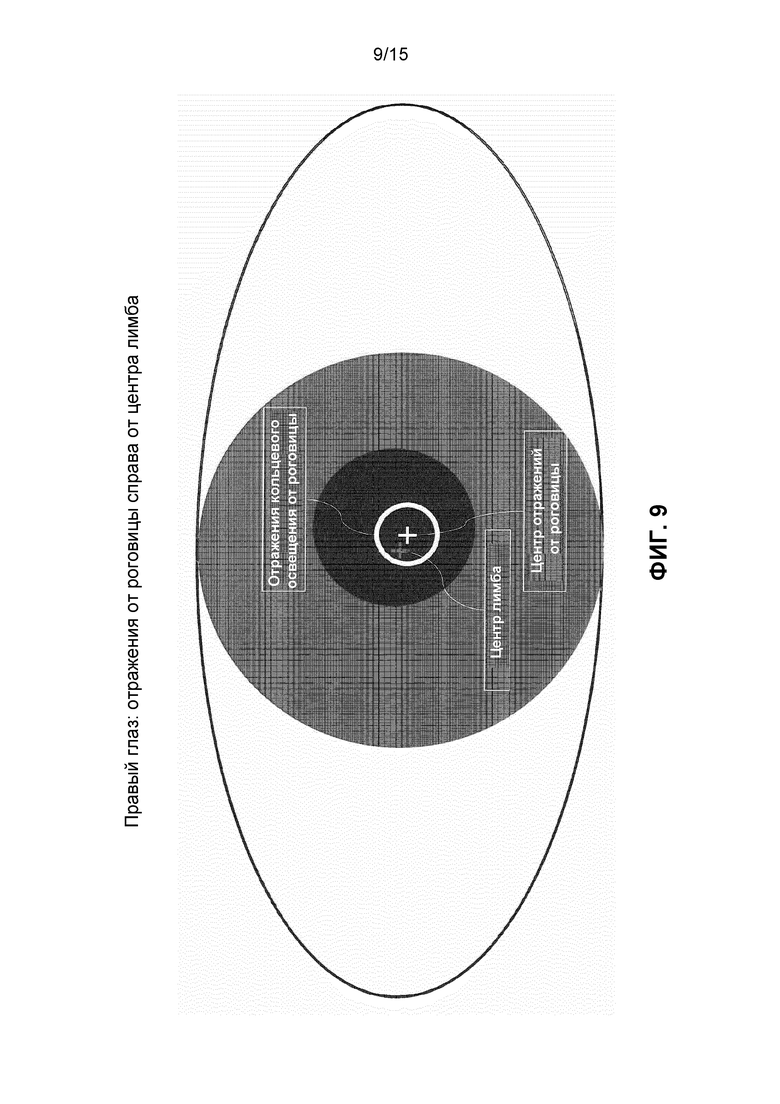
Новый аспект, используемый в этом варианте реализации, заключается в том, что ось, соединяющая центр лимба и центр роговицы, которая будет называться осью лимба (LA), также обеспечивает очень надежную и устойчивую линию отсчета для количественного определения наклона VA в направлении назальной стороны. Классификация OD/OS, основанная на центре роговицы и центре лимба, является надежной, поскольку:
- пациент фиксирует и выравнивает VA относительно OAC;
- как центр роговицы, так и центр лимба лежат на LA и очень близко к OAE;
- центр лимба всегда ближе к камере, чем центр роговицы;
- VA направлена в назальную сторону.
Это иллюстрируется на фиг. 8.
Отсюда следует, что на изображении в камере центр роговицы находится слева от центра лимба для левого глаза и справа от центра лимба для правого глаза. Это показано на фиг. 9.
Далее будет объяснено несколько более подробно, как согласно одному варианту реализации измеряется перемещение глаза и как определяется преобразование координат.
Согласно одному варианту реализации определяется относительное перемещение глаза по отношению к эталонному измерению по шести степеням свободы.
Это основа для связи между измерениями, произведенными во время разных сеансов измерения, которые могут быть разнесены во времени на минуты, дни, месяцы или годы и могут выполняться на разных диагностических устройствах. В US 7600873 B2 раскрывается, как использовать отличительные свойства глаза, такие как свойства склеральных кровеносных сосудов, зрачка, лимба, радужной оболочки, и/или отражения от роговицы для выявления перемещения глаза по 6 степеням свободы.
Шесть (6) извлеченных параметров (смещения по осям X, Y, Z и повороты вокруг осей X, Y и Z) описывают преобразование - преобразование пространственного подобия - которое может быть применено к любой производной координате на глазу или в глазу. В одном варианте реализации используется такой же основанный на отличительных свойствах подход, как в US 7600873 B2.
Выше были описаны варианты реализации, в которых параметры глаза, относящиеся к форме или положению глаза, или к его оптическим признакам, определяются, используя изображение глаза и отражений от роговицы излучения кольцеобразного источника освещения, и модель глаза, которая представляет сам глаз геометрической моделью. В добавление к отражениям от роговицы, которые определяются непосредственно, определяются, используя модель глаза, один или более так называемых “дополнительных” параметров глаза: заданная установка камеры, источник освещения, а некоторые варианты реализации содержат также точку фиксации. Такие параметры определяются на протяжении многих сеансов, чтобы осуществлять мониторинг и регистрировать изменение этих параметров с течением времени между разными сеансами, используя преобразование координат, которое основано на определении перемещения глаза в шести измерениях. Следует отметить, что описываемые “дополнительные параметры глаза” могут измеряться отдельно или в произвольном сочетании в сеансе измерения.
Теперь будут описаны варианты реализации, в которых определяются дополнительные хирургические параметры глаза, например, параметры глаза, которые относятся к имплантантам, такие, например, как ориентация или положение имплантантов. Эти параметры могут быть измерены в добавление к “дополнительным параметрам глаза”, описанным выше, или же они могут быть измерены отдельно или в качестве альтернативы им во время одного сеанса. Подобно “дополнительным параметрам глаза”, описанным выше, эти относящиеся к имплантантам параметры измеряются в течение многих сеансов, которые разнесены во времени и между которыми пациент - и его глаз - обычно совершают перемещение. Кроме того, применительно к этим “относящимся к имплантантам параметрам” определяется перемещение глаза между разными сеансами по шести степеням свободы для получения преобразования, которое позволяет трансформировать измеренные параметры в устойчивую систему координат, согласованную по многим сеансам. Это позволяет затем сравнивать и осуществлять мониторинг того, как эти относящиеся к имплантантам параметры изменяются с течением времени, что является очень важной информацией для доктора. С этой целью эти параметры могут сравниваться с соответствующими им относящимися к имплантантам параметрами, которые определены в предшествующих сеансах, или с “дополнительными”, не относящимися к имплантантам параметрами. Параметры от разных сеансов (не относящиеся к имплантантам, относящиеся к имплантантам параметры или любое их сочетание), которые подлежат сравнению, могут быть визуализированы в одном и том же изображении, используя преобразование координат, полученное определением перемещения глаза, что позволяет доктору судить о развитии этих параметров с течением времени в устойчивой системе координат, которая компенсирует или исключает эффект перемещения глаза между разными сеансами.
Другими хирургическими параметрами глаза, которые могут быть определены, являются, например, положение и/или контур роговичных или лимбальных, или склеральных надрезов. Эти параметры могут иметь отношение к имплантанту (и могут поэтому в некоторых вариантах реализации быть “относящимся к имплантантам параметрам”), однако существуют также способы хирургической техники, такие, например, как LRI (надрез для релаксации лимба), в которых надрезы делаются без помещения в них имплантанта. Для таких хирургических способов соответствующие параметры, такие как положение и/или контур роговичных или лимбальных, или склеральных надрезов, могут определяться по многим сеансам.
Далее будут описаны варианты реализации, где определяются относящиеся к имплантантам параметры глаза. Параметры глаза, относящиеся к имплантантам, могут в одном варианте реализации принадлежать к одной из двух категорий: первой из них является положение и/или ориентация имплантанта в глазу, а вторая относится к положению или ориентации разрыва.
Обе они могут быть также объединены, например, определять положение разрыва и положение или форму линзового имплантанта.
Далее будут более подробно описаны некоторые варианты реализации.
Сначала будут описаны некоторые варианты реализации применительно к измерению ориентации и/или положения имплантантов в глазу.
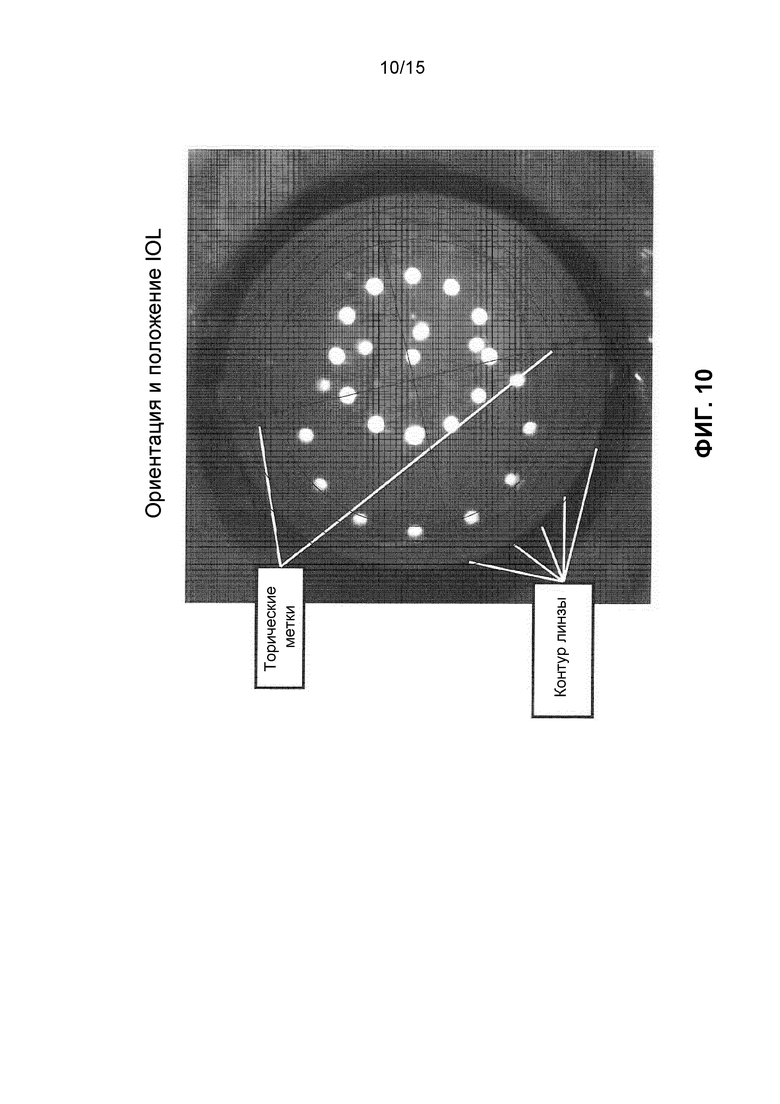
a) Положение маркировочных меток имплантанта в глазу (торические метки или мультифокальные метки)
Разные глазные имплантанты, такие как торические IOL или мультифокальные IOL, должны иметь четко различимые маркеры. Согласно одному варианту реализации эти маркеры автоматически обнаруживаются, используя способы обработки изображения, например, обнаружение края и/или обнаружение признака на основе шаблона. Таким способом может быть обнаружен любой нанесенный человеком признак на или во вкладыше или имплантанте, и его поперечное положение в глазу может контролироваться во времени.
В случае торических IOL, например, маркировочные метки показывают либо ось укручения, либо ось плоского участка торической линзы, и они используются хирургом для точного выравнивания линзы в глазу. В случае мультифокальных IOL видны концентрические кольца в линзе, которые используются хирургом для определения положения линзы в поперечном направлении. На фиг. 10 показаны эти маркировочные метки и их определение в изображении глаза.
b) Ориентация циклодукции имплантантов
Как было сказано выше, ориентация циклодукции торической IOL может быть выявлена обнаружением торических меток на линзе, которые подобны оси плоского участка, оси укручения или оси имплантанта на IOL (в зависимости от типа). Это также иллюстрируется на фиг. 10 осью, которая перекрывается осью укручения или плоского участка торической линзы и которая определяется исходя из положения этих меток.
c) Поворотная и наклонная ориентация имплантанта
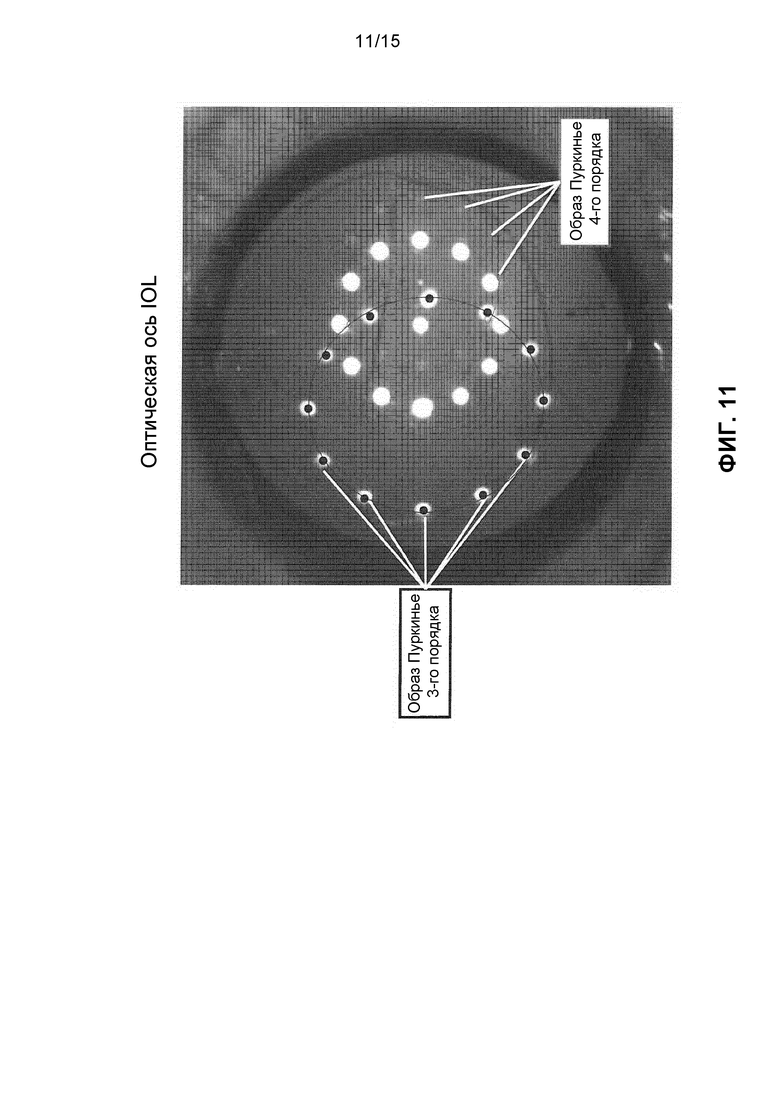
Точная форма и рефракция имплантанта (например, IOL) известны. Это позволяет модели, основанной на подходе с отслеживанием траектории луча, выявлять поворотную, наклонную ориентацию и положение IOL в поперечном направлении в глазу, что используется согласно одному варианту реализации для определения поворота и наклона имплантанта.
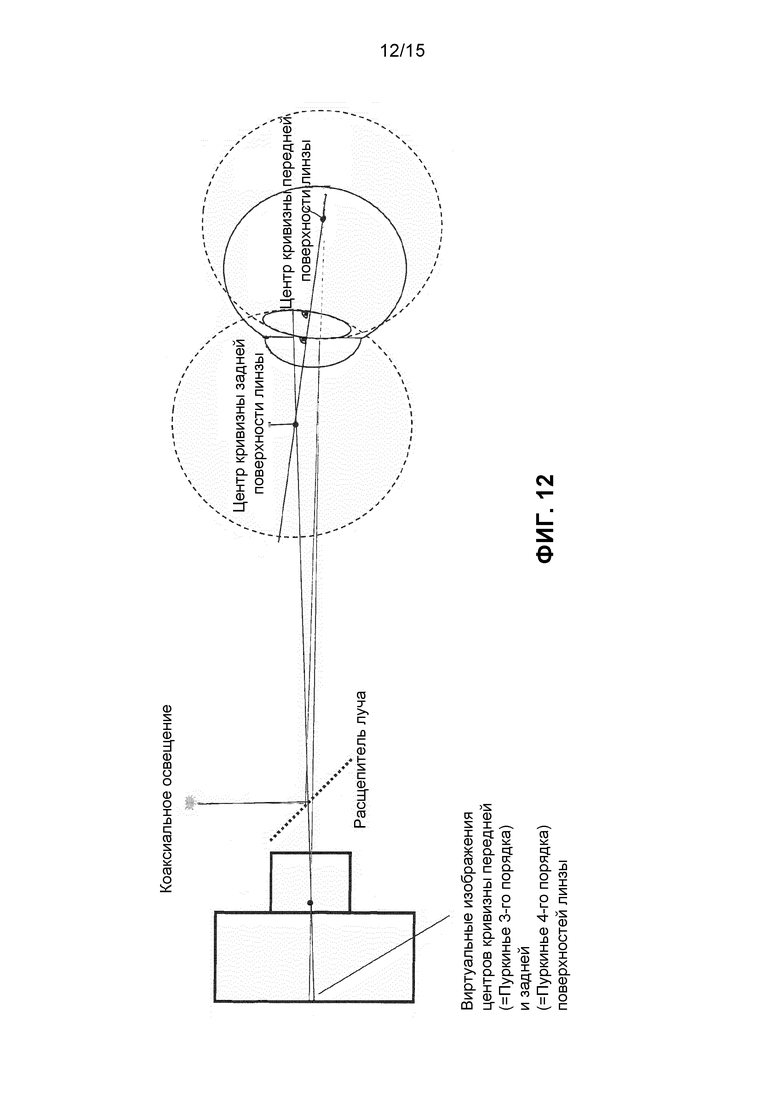
Известная коаксиальная осветительная система RD создает отражения на передней стороне и на задней стороне IOL (образ Пуркинье 3-го и 4-го порядка), как показано на фиг. 11. Если линза поворачивается или наклоняется, образы Пуркинье 3-го и 4-го порядка будут двигаться относительно друг друга. В особом случае, в котором образы Пуркинье 3-го и 4-го порядка накладываются друг на друга, оптическая ось IOL выравнивается с оптической осью камеры. Положения образов Пуркинье 3-го и 4-го порядка могут быть использованы для определения поворота и наклона имплантанта, например, используя подход, описанный в работе “Воспроизводимость ориентации интраокулярной линзы и измерение наклона с помощью прибора Пуркинье”, Yutaro Nishi et. al. J Cataract Refract Surg 2010; 36:1529-1535 Q 2010 ASCRS and ESCRS. В этом контексте также сделана ссылка на фиг. 12, где иллюстрируется определение ориентации интраокулярной линзы на основе отражений Пуркинье 3-го и 4-го порядка. Как и в предыдущем случае с использованием эталонного устройства, применяется круговое освещение, ось которого совпадает с осью камеры. Способ определения ориентации в одном варианте реализации может тогда содержать следующие этапы:
1. Определение центра образа Пуркинье 3-го порядка.
2. Определение центра образа Пуркинье 4-го порядка.
3. Использование информации о форме IOL, включающей в себя расстояние между передним и задним центрами кривизны = DCC.
4. Выявление оптической оси линзы, используя расстояние между центрами образов Пуркинье 3-го и 4-го порядка, параметры камеры и DCC.
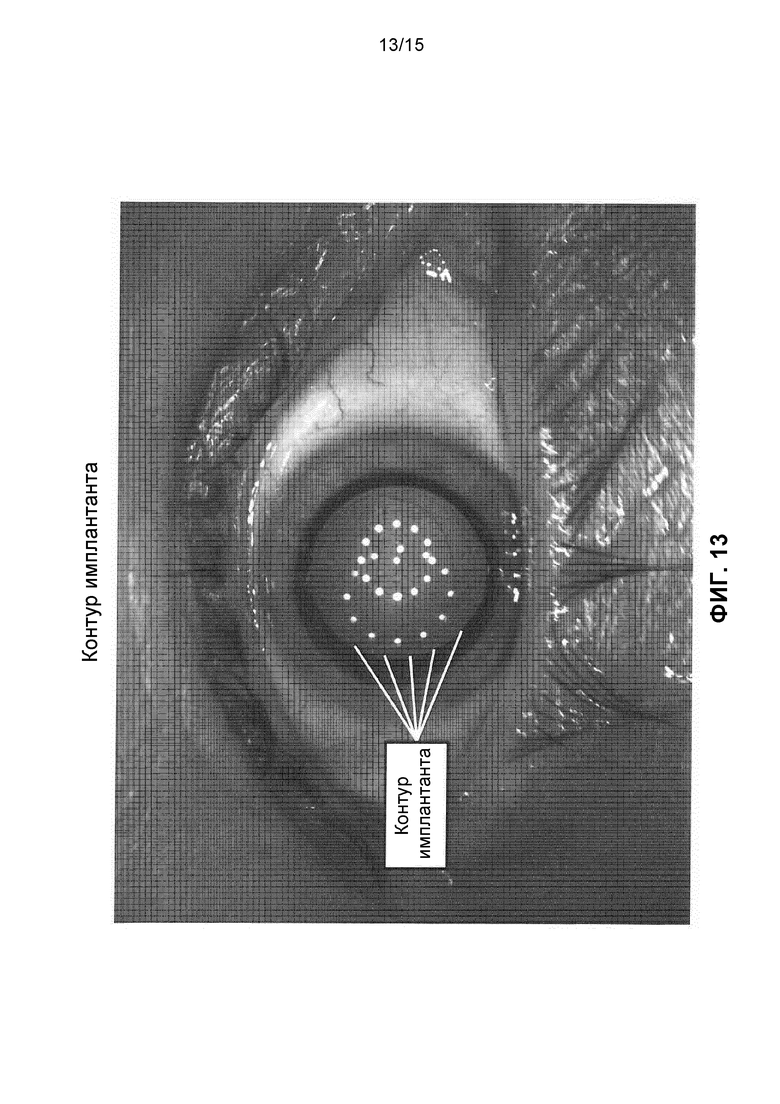
d) Контур имплантанта
Контур имплантанта четко виден в изображениях RD, если он не загорожен тканью радужной оболочки. Незагороженные части могут быть выявлены с помощью стандартных способов обработки изображения, таких как обнаружение края. Совмещая известную модель формы края вкладыша с обнаруженными частями контура или обнаруженными метками имплантанта, в одном варианте реализации можно также выявить загороженные части контура вкладыша, что иллюстрируется на фиг. 13.
e) Положение центра имплантанта по XY
Когда форма имплантанта известна, могут быть использованы разные способы для выявления положения центра имплантанта в поперечном направлении. Согласно одному варианту реализации обнаружение положения меток имплантанта может быть осуществлено, используя контур имплантанта для выявления центра или подход с отслеживанием траектории луча по пункту c).
f) Положение гаптических элементов имплантанта в глазу
Для обнаружения гаптических элементов согласно одному варианту реализации используется тот же подход, что и для контура имплантанта. Гаптические элементы имеют хорошо определенную форму и по существу являются частью контура имплантанта.
Теперь будут описаны некоторые варианты реализации, в которых относящийся к имплантанту параметр относится к разрыву.
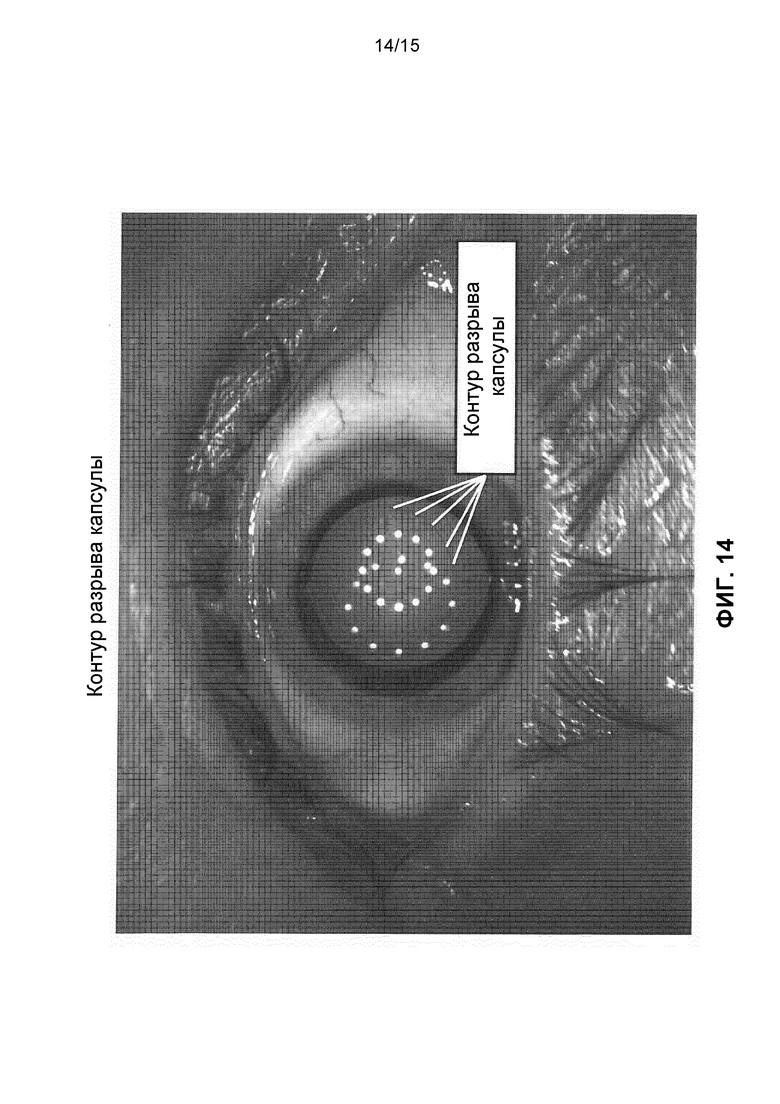
g) Контур
Используя способ обнаружения края, можно восстановить четко видимый разрыв в RD изображении. Альтернативно он может быть также измерен вручную путем выбора многоугольника, который наиболее близко совпадает с контуром разрыва. Контур разрыва показан на фиг. 14.
h) Диаметр
Диаметр может быть выявлен вписыванием методом наименьших квадратов круга или эллипса в контур разрыва.
i) Положение в глазу по XY
Положение разрыва по XY согласно одному варианту реализации может быть найдено и определено как центр наиболее близко совпадающего круга или эллипса в контуре разрыва.
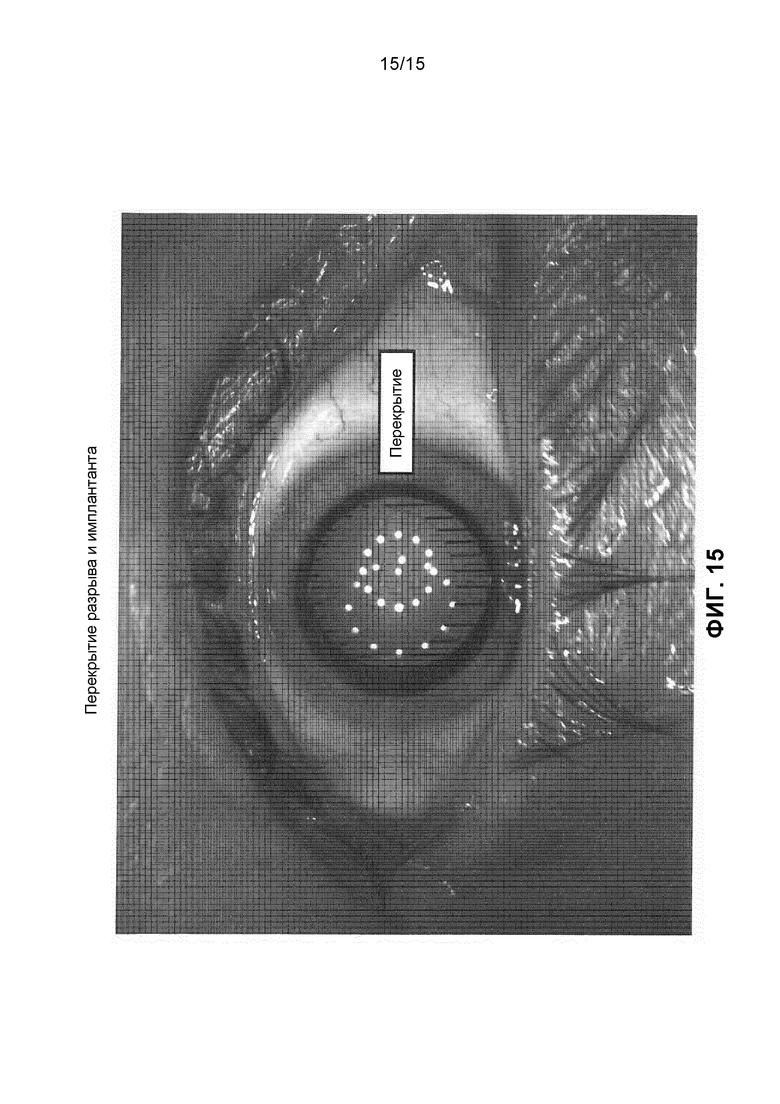
j) Перекрытие с линзой
Наложение контура разрыва на контур линзы. Зона внутри контура линзового имплантанта и снаружи контура разрыва перекрываются. Это показано на фиг. 15. Это важное измерение для определения того, насколько устойчив линзовый имплантант в глазу. Если перекрытие с одной стороны становится слишком малым, имеется вероятность того, что имплантант будет неустойчив.
Выше были описаны некоторые варианты реализации изобретения, которые обеспечивают несколько преимуществ.
Например, при наличии возможности пространственно преобразовывать все измерения в начальную эталонную систему координат (или любую произвольную систему координат, выбранную в одном из сеансов) любое влияние вследствие потенциально возможного перемещения глаза может быть исключено, и все измеренные параметры могут быть нормированы по отношению к эталонной системе координат.
Это позволяет осуществлять непрерывный мониторинг всех измеряемых параметров глаза. Основанный на достоверных измерениях подход к исследованию послеоперационного поведения имплантантов и хирургических надрезов в глазу становится возможным без ограничения точности применительно к величине перемещения глаза, неминуемо присутствующего во всех исследованиях собранных диагностических данных по многим сеансам.
Специалистам в данной области техники будет понятно, что модули или устройства в вариантах реализации, описанных выше, могут быть реализованы программным или аппаратным обеспечением или их сочетанием. В частности, аппаратное обеспечение может содержать камеру и компьютер, которые запрограммированы на выполнение задач, описанных в связи с вариантами реализации изобретения, и, конкретно, таких задач, как обработка изображений для определения параметров глаза или вывода на дисплей для отображения на дисплее параметров глаза в дополнение к изображению глаза.
Изобретение относится к медицинской технике. Представлено устройство для мониторинга одного или более хирургических параметров глаза пациента на протяжении многих сеансов, разнесенных во времени и между которыми глаз пациента может иметь перемещение. Устройство содержит: камеру для получения одного или более изображений глаза; модуль для определения во время первого сеанса хирургического параметра глаза и его координат, основываясь на изображении, полученном камерой, в первой системе координат; модуль для определения во время второго сеанса хирургического параметра глаза и его координат, основываясь на полученном камерой изображении, во второй системе координат; модуль для определения перемещения глаза по шести степеням свободы между первым и вторым сеансами и для определения преобразования координат, основываясь на этом; модуль для преобразования, основываясь на определенном перемещении глаза, хирургического параметра глаза и его координат из первой системы координат во вторую систему координат; модуль для количественного определения и/или визуализации изменения хирургического параметра глаза и его координат между первым и вторым сеансами, основываясь на хирургическом параметре глаза и его координатах, измеренных во время второго сеанса, и преобразованном хирургическом параметре глаза и его координатах, измеренных во время первого сеанса. Хирургические параметры глаза представляют собой один или более из следующих: относящиеся к имплантанту параметры глаза, которые основаны на имплантанте, хирургически вставленном в глаз пациента; или положение и/или контур роговичных или лимбальных, или склеральных надрезов. Хирургические параметры глаза дополнительно содержат одно или более из следующего: k-показания, которые определяют форму роговицы в терминах параметров эллипсоида вращения; линию взгляда как линию, соединяющую центр зрачка и точку фиксации в известном положении; глубину камеры роговицы; зрительную ось глаза; определение того, является ли глаз левым глазом или правым глазом. Применение данного изобретения позволит повысить точность диагностики и хирургическую точность при работе с имплантатом. 13 з.п. ф-лы, 15 ил.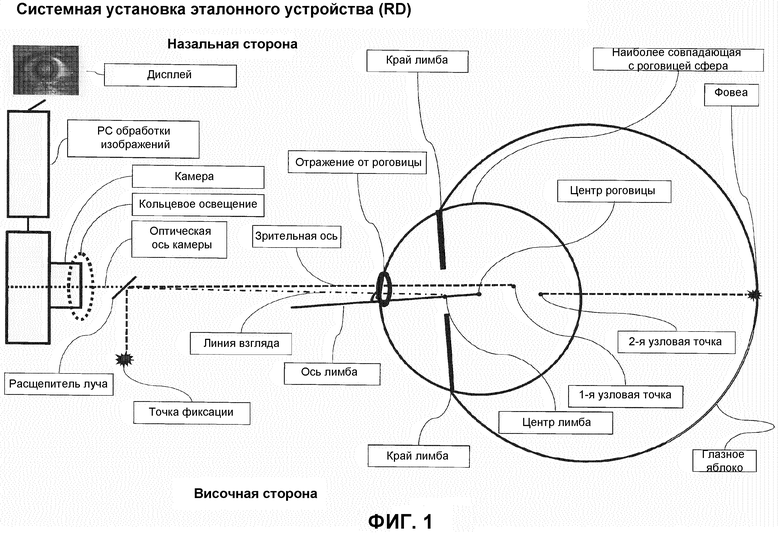
1. Устройство для мониторинга одного или более хирургических параметров глаза пациента на протяжении многих сеансов, которые разнесены во времени и между которыми глаз пациента может иметь перемещение, при этом устройство содержит:
камеру для получения одного или более изображений глаза;
модуль для определения во время первого сеанса упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат, основываясь на изображении, полученном упомянутой камерой, в первой системе координат;
модуль для определения во время второго сеанса, разнесенного во времени относительно упомянутого первого сеанса, упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат, основываясь на полученном упомянутой камерой изображении, во второй системе координат;
модуль для определения перемещения глаза по шести степеням свободы между упомянутым первым и упомянутым вторым сеансами и для определения преобразования координат, основываясь на этом;
модуль для преобразования, основываясь на упомянутом определенном перемещении глаза, упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат из упомянутой первой системы координат в упомянутую вторую систему координат;
модуль для количественного определения и/или визуализации изменения упомянутого, по меньшей мере одного, хирургического параметра глаза и его координат между упомянутым первым и упомянутым вторым сеансами, основываясь на упомянутом хирургическом параметре глаза и его координатах, измеренных во время упомянутого второго сеанса, и упомянутом преобразованном хирургическом параметре глаза и его координатах, измеренных во время упомянутого первого сеанса, при этом упомянутые хирургические параметры глаза представляют собой один или более из следующих:
относящиеся к имплантанту параметры глаза, которые основаны на имплантанте, хирургически вставленном в глаз пациента; или
положение и/или контур роговичных или лимбальных, или склеральных надрезов;
при этом упомянутые хирургические параметры глаза дополнительно содержат одно или более из следующего:
k-показания, которые определяют форму роговицы в терминах параметров эллипсоида вращения;
линию взгляда как линию, соединяющую центр зрачка и точку фиксации в известном положении;
глубину камеры роговицы;
зрительную ось глаза;
определение того, является ли глаз левым глазом или правым глазом.
2. Устройство по п. 1, в котором упомянутый относящийся к имплантанту параметр содержит одно или более из следующего:
ориентацию и/или положение имплантанта в глазу;
положение и/или контур разрыва;
перекрытие разрыва с контуром имплантанта.
3. Устройство по п. 1 или 2, в котором упомянутый модуль для количественного определения и/или отображения изменения упомянутого, по меньшей мере одного, хирургического параметра глаза содержит:
модуль для отображения упомянутого, по меньшей мере одного, хирургического параметра глаза, измеренного во время упомянутого второго сеанса, и упомянутого преобразованного хирургического параметра глаза, измеренного во время упомянутого первого сеанса, в изображении глаза, полученном во время упомянутого второго сеанса; и/или
модуль для вычисления разности между упомянутым хирургическим параметром глаза, измеренным во время упомянутого второго сеанса, и упомянутым преобразованным хирургическим параметром глаза, измеренным во время упомянутого первого сеанса, и для визуализации упомянутой разности в упомянутом изображении глаза, полученном во время упомянутого второго сеанса.
4. Устройство по одному из пп. 1,2, в котором
упомянутый первый сеанс является предоперационным сеансом, а упомянутый второй сеанс является интраоперационным или послеоперационным сеансом, или
упомянутый первый сеанс является интраоперационным сеансом, а упомянутый второй сеанс является послеоперационным сеансом, или
упомянутый первый сеанс является послеоперационным сеансом, а упомянутый второй сеанс является другим послеоперационным сеансом, проводимым позже.
5. Устройство по одному из пп. 1,2, дополнительно содержащее:
модуль для измерения и регистрации по меньшей мере одного хирургического параметра глаза на протяжении многих сеансов во времени, чтобы зарегистрировать изменение упомянутого, по меньшей мере одного, хирургического параметра глаза во времени.
6. Устройство по одному из пп. 1,2, дополнительно содержащее:
осветительное устройство для освещения глаза световой картиной в форме кольца для генерации отражений от роговицы, причем упомянутое осветительное устройство предпочтительно располагается таким образом, чтобы ось кольца совпадала с оптической осью камеры;
модуль для определения во время упомянутого первого и/или упомянутого второго сеанса положения отражений от роговицы в изображении глаза;
модуль для определения во время упомянутого первого и/или упомянутого второго сеанса, основываясь на упомянутом определенном положении отражений от роговицы, по меньшей мере одного, дополнительного параметра глаза и его координат в упомянутой первой и/или второй системе координат, основанной на геометрической модели, представляющей глаз в виде сферического глазного яблока, имеющего наложенную на него роговицу сферической формы;
модуль для визуализации упомянутого, по меньшей мере одного, дополнительного параметра глаза вместе с упомянутым, по меньшей мере одним, относящимся к имплантанту параметром глаза в одном и том же изображении после преобразования его координат, основываясь на перемещении глаза между упомянутым первым и упомянутым вторым сеансами, так что перемещение глаза компенсируется.
7. Устройство по одному из пп. 1,2, в котором
упомянутый, по меньшей мере один, дополнительный параметр определяется на основе модели глаза, которая представляет форму и положение глаза в виде сферического глазного яблока с роговицей, наложенной на него и имеющей сферическую форму или форму эллипсоида, что тем самым позволяет производить вычисление упомянутого, по меньшей мере одного, дополнительного параметра, используя измеренное положение упомянутых отражений от роговицы и упомянутую модель глаза.
8. Устройство по п. 1, в котором
упомянутый хирургический параметр глаза содержит k-показания, которые измеряются определением наиболее близко совпадающего с отражениями от роговицы эллипса и определением главной оси, малой оси и ориентации этого эллипса.
9. Устройство по одному из пп. 1,2, причем
упомянутое устройство дополнительно содержит целевую точку фиксации с известными координатами, предпочтительно на оптической оси камеры, и упомянутый, по меньшей мере один, дополнительный параметр глаза содержит зрительную ось, которая определяется как вектор, соединяющий центр роговицы и известную целевую точку фиксации, при этом центр роговицы определяется на основе положения отражений от роговицы.
10. Устройство по одному из пп. 1,2, в котором
упомянутый, по меньшей мере один, дополнительный параметр глаза содержит угол каппа между зрительной осью и зрачковой осью, или
упомянутый дополнительный параметр является точкой пересечения между зрительной осью и поверхностью роговицы, при этом радиус роговицы определяется на основе положения упомянутых отражений от роговицы.
11. Устройство по одному из пп. 1,2, в котором
упомянутый, по меньшей мере один, дополнительный параметр глаза содержит глубину передней камеры, которая определяется на основе определения радиуса лимба Rl и предположения, что он является широтным кругом на наиболее близко совпадающей с роговицей сфере с радиусом Rc, который определяется на основе отражений света от роговицы, так что глубина CD камеры роговицы выводится из формулы:
CD=Rc-sqrt(Rc^2-Rl^2) где sqrt - квадратный корень.
12. Устройство по одному из пп. 1,2, в котором
упомянутый, по меньшей мере один, дополнительный параметр глаза содержит линию взгляда, которая определяется как вектор, соединяющий центр зрачка и упомянутую точку фиксации в известном положении, при этом координата Z центра зрачка определяется на основе известного расстояния между камерой и глазом, а координаты X и Y зрачка определяются на основе измеренного положения зрачка в изображении, и/или
упомянутый, по меньшей мере один, дополнительный параметр глаза содержит зрачковую ось, которая является линией, идущей через центр зрачка и являющуюся ортогональной к поверхности роговицы.
13. Устройство по одному из пп. 1,2, в котором упомянутый, по меньшей мере один, дополнительный параметр глаза содержит определение того, находится ли центр лимба или центр роговицы ближе к оптической оси камеры, когда пациент фиксируется на известной точке фиксации, лежащей на оптической оси камеры.
14. Устройство по одному из пп. 1,2, которое дополнительно содержит:
модуль для визуализации произвольного сочетания упомянутых, по меньшей мере одного или более, хирургических параметров глаза и упомянутых, по меньшей мере одного или более, дополнительных параметров глаза, определенных во время упомянутого первого сеанса и, возможно, другого произвольного сочетания упомянутых, по меньшей мере одного или более, хирургических параметров глаза и упомянутых, по меньшей мере одного или более, дополнительных параметров глаза, определенных во время упомянутого второго сеанса, в одном и том же изображении, так что перемещение глаза между упомянутыми первым и вторым сеансами компенсируется.
| УСТАНОВКА ДЛЯ ПРАВКИ ТРУБ БОЛЬШОГО ДИАМЕТРА | 1999 |
|
RU2184005C2 |
| WO 2006101943 A2, 28.09.2006 | |||
| US 5416317 A1, 16.05.1995 | |||
| Устройство для исследования глазного дна | 1991 |
|
SU1832005A1 |
