СИСТЕМА УПРАВЛЕНИЯ СВАЛИВАНИЕМ
Область техники, к которой относится изобретение
Настоящее раскрытие, в общем, относится к самолетам, в частности к управлению полетом самолета. Еще более конкретно, настоящее раскрытие относится к способу и устройству для идентификации состояния, в котором самолет может потенциально перейти в сваливание, учитывая текущее состояние самолета во время полета.
Уровень техники
Состояние самолета во время полета определяется на основе многих факторов. Эти факторы могут включать в себя, например, без ограничения, скорость самолета, размер самолета, форму самолета, профиль крыла самолета, угол атаки самолета и другие типы факторов. В некоторых случаях могут изменяться возможности маневрирования самолета в ответ на изменение состояния самолета во время полета.
Например, самолет может перейти в сваливание, если угол атаки самолета увеличивается таким образом, что подъемная сила, генерируемая самолетом во время полета, уменьшается. Используемый здесь термин "подъемная сила" представляет собой силу, генерируемую, когда воздух протекает над самолетом во время полета. Эта сила прямо противоположна весу самолета и удерживает самолет в воздухе.
Конкретный угол атаки, при котором подъемная сила, генерируемая самолетом, уменьшается, может изменяться для различных типов самолета. Угол атаки, при котором самолет может потенциально перейти в сваливание, может быть основан на таких факторах, как, например, без ограничений, профиль крыльев самолета, форма в плане крыльев, соотношение размера крыльев и других факторах. Кроме того, угол атаки, при котором самолет может потенциально перейти в сваливание, соответствует определенной скорости самолета. Эта скорость может называться "скоростью сваливания".
На некоторых доступных в настоящее время коммерческих самолетах используется система аварийного оповещения, которая генерирует сигнал аварийного оповещения, когда скорость самолета падает ниже скорости аварийного оповещения, которая больше, чем скорость сваливания на определенную выбранную величину. Такая скорость аварийного оповещения также может называться "минимальной скоростью". В частности, когда скорость самолета меньше, чем скорость аварийного оповещения, аварийное оповещение генерируется таким образом, что оператор самолета может предпринять действия для предотвращения или, по меньшей мере, снижения вероятности сваливания самолета.
Скорость сваливания самолета может определять возможности маневрирования самолета. Например, скорость сваливания самолета может определять минимальные расстояния, требуемые для взлета и посадки самолета. Эти расстояния называются длиной взлета и длиной посадки, соответственно, для самолета. Длина взлета и длина посадки самолета определены самыми низкими скоростями, на которых самолет может лететь во время взлета и посадки без сваливания. Может потребоваться, чтобы скорости взлета и посадки для самолета были больше или равны скорости аварийного оповещения самолета.
Следовательно, скорость сваливания самолета может влиять на возможности маневрирования самолета в разных аэропортах. В частности, длина взлетно-посадочной полосы, с которой самолет взлетает в аэропорту, должна быть, по меньшей мере, равна длине его взлета. Аналогично, длина взлетно-посадочной полосы, на которую самолет садится в аэропорту, должна быть, по меньшей мере, равна длине посадки. Длина взлета и длина посадки для самолета могут быть уменьшены в результате уменьшения скорости аварийного оповещения во время взлета и посадки, соответственно.
Кроме того, скорость сваливания самолета может влиять на способность маневрирования самолета при увеличенных углах поперечного наклона, с учетом различных факторов перегрузки. Например, радиус поворота самолета может быть определен скоростью самолета и максимальным углом поперечного наклона, при котором самолет может лететь без сваливания на и/или выше скорости аварийного оповещения. В частности, минимальная скорость маневрирования, при которой самолет может лететь с учетом выбранного фактора нагрузки для самолета, должна быть больше, чем скорость аварийного оповещения при выбранном факторе нагрузки.
Длина взлета и длина посадки для самолета могут быть установлены различными нормативными документами, такими как принятыми Федеральным управлением авиации. Некоторые используемые в настоящее время системы аварийного оповещения являются консервативными в отношении скорости аварийного оповещения. Например, при таких типах систем аварийного оповещения аварийное оповещение может быть сгенерировано при более высоких скоростях аварийного оповещения для повышения безопасности при управлении самолетом. Однако эти более высокие скорости аварийного оповещения могут привести к тому, что некоторые самолеты будут неспособны работать в некоторых аэропортах. Поэтому было бы желательно обеспечить способ и устройство, которые учитывали бы, по меньшей мере, некоторые из проблем, описанных выше, а также, возможно, другие проблемы.
Раскрытие изобретения
В другом иллюстративном варианте осуществления раскрыт способ управления самолетом во время полета, способ включает в себя следующие действия: идентифицируют угол атаки аварийного оповещения для самолета, используя ранее идентифицированную воздушную скорость аварийного оповещения для самолета; идентифицируют коэффициент подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета; и идентифицируют воздушную скорость аварийного оповещения для самолета, используя коэффициент подъемной силы аварийного оповещения для самолета и текущий коэффициент подъемной силы для самолета.
Способ, описанный выше, включает в себя следующие действия: идентифицируют набор пороговых значений для использования при генерировании аварийного оповещения для оператора самолета, обозначающего потенциальное состояние сваливания для самолета, используя, по меньшей мере, одно из следующего: угол атаки аварийного оповещения, коэффициент подъемной силы аварийного оповещения и скорость аварийного оповещения.
Способ, описанный выше, в котором этап идентификации набора пороговых значений для использования при генерировании аварийного оповещения, обозначающего потенциальное состояние сваливания для самолета, включает в себя следующие действия: идентифицируют, по меньшей мере, одно из следующего: пороговое значение угла атаки, используя угол атаки аварийного оповещения, порогового значения коэффициента подъемной силы, используя коэффициент подъемной силы аварийного оповещения, и пороговое значение скорости, используя скорость аварийного оповещения.
Способ, описанный выше, включает в себя следующие действия: генерируют аварийное оповещение, когда, по меньшей мере, одно из следующего: угол атаки самолета больше, чем пороговое значение угла атаки, текущий коэффициент подъемной силы самолета больше, чем пороговое значение коэффициента подъемной силы, и скорость самолета ниже, чем пороговое значение скорости; и передают сигнал аварийного оповещения в вибросигнализатор рукоятки управления в самолете.
Описанный выше способ, в котором этап идентификации угла атаки аварийного оповещения для самолета, используя ранее идентифицированную скорость аварийного оповещения для самолета, включает в себя следующие действия: идентифицируют исходный угол атаки аварийного оповещения, используя положение фиксатора закрылка и таблицу; идентифицируют смещение компенсации числа Маха, используя ранее идентифицированную скорость аварийного оповещения самолета; и идентифицируют угол атаки аварийного оповещения для самолета, используя исходный угол атаки аварийного оповещения и смещение компенсации числа Маха.
Описанный выше способ, в котором этап идентификации угла атаки аварийного оповещения для самолета, используя исходный угол атаки аварийного оповещения и смещение компенсации числа Маха, включает в себя следующие действия: идентифицируют угол атаки аварийного оповещения самолета, используя исходный угол атаки аварийного оповещения, смещение компенсации числа Маха и, по меньшей мере, одно из следующего: текущее смещение нагрузки на крыло, смещение компенсации воздушного тормоза и смещение угла атаки.
Описанный выше способ, в котором этап идентификации коэффициента подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета, включает в себя следующие действия: идентифицируют коэффициент подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета, положение фиксатора закрылка и таблицу.
Описанный выше способ, в котором этап идентификации скорости аварийного оповещения для самолета, используя коэффициент подъемной силы аварийного оповещения для самолета и текущий коэффициент подъемной силы для самолета, включает в себя следующие действия: идентифицируют текущий коэффициент подъемной силы для самолета, используя скорректированный угол атаки, положение фиксатора закрылка и таблицу; делят текущий коэффициент подъемной силы на коэффициент подъемной силы аварийного оповещения для генерирования фактора подъемной силы; идентифицируют квадратный корень фактора подъемной силы для генерирования фактора скорости; и идентифицируют скорость аварийного оповещения, используя фактор скорости и текущую скорость для самолета, в котором скорость аварийного оповещения представляет собой число Маха аварийного оповещения для самолета, и текущая скорость представляет собой текущее число Маха для самолета.
Описанный выше способ, в котором этап идентификации коэффициента подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета, включает в себя следующие действия: идентифицируют коэффициент подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета, при котором коэффициент подъемной силы аварийного оповещения, по существу, на выбранный процент ниже, чем текущий коэффициент подъемной силы сваливания для самолета.
Описанный выше способ, в котором этапы включают следующие действия: идентифицируют угол атаки аварийного оповещения для самолета, используя ранее идентифицированную скорость аварийного оповещения для самолета; идентифицируют коэффициент подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета; и идентифицируют скорость аварийного оповещения для самолета, используя коэффициент подъемной силы аварийного оповещения для самолета и текущий коэффициент подъемной силы для самолета, - выполняют для маневра самолета.
В другом варианте осуществления раскрыт способ для обозначения потенциального состояния сваливания для самолета во время полета, способ, включающий в себя следующие действия: идентифицируют коэффициент подъемной силы аварийного оповещения для самолета; регулируют коэффициент подъемной силы аварийного оповещения в ответ на количество изменений в текущем состоянии самолета; и идентифицируют набор пороговых значений для использования при генерировании аварийного оповещения для оператора самолета, обозначающего, что самолет достиг потенциального состояния сваливания, используя коэффициент подъемной силы аварийного оповещения.
Описанный выше способ, включающий в себя следующие действия: генерируют аварийное оповещение, в котором аварийное оповещение содержит, по меньшей мере, одно из следующего: тактильное аварийное оповещение, визуальное аварийное оповещение, звуковое аварийное оповещение и сообщение.
В еще одном варианте осуществления, раскрыта система управления сваливанием, включающая в себя генератор пороговых значений, выполненный с возможностью идентификации угла атаки аварийного оповещения для самолета, используя ранее идентифицированную воздушную скорость аварийного оповещения для самолета; идентификации коэффициента подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета; и идентификации воздушной скорости аварийного оповещения для самолета, используя коэффициент подъемной силы аварийного оповещения для самолета и текущий коэффициент подъемной силы для самолета.
Система управления сваливанием, описанная выше, в которой генератор порогового значения выполнен с возможностью идентификации набора пороговых значений для использования при генерировании аварийного оповещения для оператора самолета, обозначающего потенциальное состояние сваливания для самолета, используя, по меньшей мере, одно из следующего: угол атаки аварийного оповещения, коэффициент подъемной силы аварийного оповещения и скорость аварийного оповещения.
Система управления сваливанием, описанная выше, в которой генератор порогового значения выполнен с возможностью идентификации набора пороговых значений для использования при генерировании аварийного оповещения, обозначающего потенциальное состояние сваливания для самолета, путем идентификации, по меньшей мере, одного из: пороговое значение угла атаки, используя угол атаки аварийного оповещения, порогового значения коэффициента подъемной силы, используя коэффициент подъемной силы аварийного оповещения, и порогового значения скорости, используя скорость аварийного оповещения.
Система управления сваливанием, описанная выше, дополнительно включающая в себя генератор аварийного оповещения, выполненный с возможностью приема набора пороговых значений из генератора пороговых значений и генерирования аварийного оповещения, когда, по меньшей мере, одно из следующего: угол атаки самолета больше, чем пороговое значение угла атаки, текущий коэффициент подъемной силы самолета больше, чем пороговое значение коэффициента подъемной силы, и скорость самолета ниже, чем пороговое значение скорости, и подачи аварийного оповещения в вибросигнализатор рукоятки управления в самолете.
Система управления сваливанием, описанная выше, в которой генератор порогового значения выполнен с возможностью идентификации угла атаки аварийного оповещения путем идентификации исходного угла атаки аварийного оповещения, используя положение фиксатора закрылка и таблицу среди множества таблиц; идентификации смещения компенсации числа Маха, используя ранее идентифицированную скорость аварийного оповещения для самолета; и идентификации угла атаки аварийного оповещения для самолета, используя исходный угол атаки аварийного оповещения и смещение компенсации числа Маха.
Система управления сваливанием, описанная выше, в которой генератор порогового значения выполнен с возможностью идентификации угла атаки аварийного оповещения для самолета, путем идентификации угла атаки аварийного оповещения для самолета, используя исходный угол атаки аварийного оповещения, смещение компенсации числа Маха и, по меньшей мере, одно из следующего: текущее смещение нагрузки на крыло, смещение компенсации воздушного тормоза и смещение угла атаки.
Система управления сваливанием, описанная выше, в которой генератор порогового значения выполнен с возможностью идентификации коэффициента подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета, положение фиксатора закрылка и таблицу.
Система управления сваливанием, описанная выше, в которой генератор порогового значения дополнительно выполнен с возможностью выполнения этапов идентификации угла атаки аварийного оповещения для самолета, используя ранее идентифицированную скорость аварийного оповещения для самолета; идентификации коэффициента подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения для самолета; и идентификации скорости аварийного оповещения для самолета, используя коэффициент подъемной силы аварийного оповещения для самолета и текущего коэффициента подъемной силы для самолета для выполнения маневра самолетом.
Эти свойства и функции могут быть достигнуты независимо в различных вариантах осуществления настоящего раскрытия или могут быть скомбинированы в других вариантах осуществления, в которых дополнительные детали будут представлены со ссылкой на следующее описание и чертежи.
Краткое описание чертежей
Новые свойства, которые составляют характеристики иллюстративных вариантов осуществления, представлены в приложенной формуле изобретения. Иллюстративные варианты осуществления, однако, а также предпочтительный способ использования, дополнительные его цели и преимущества будут более понятны со ссылкой на следующее подробное описание иллюстративного варианта осуществления настоящего раскрытия, которое следует читать совместно с приложенными чертежами, на которых:
на фиг. 1 показана иллюстрация самолета в соответствии с иллюстративным вариантом осуществления;
на фиг. 2 показана иллюстрация самолета в среде самолета, в форме блок-схемы, в соответствии с иллюстративным вариантом осуществления;
на фиг. 3 показана иллюстрация множества факторов, которые влияют на подъемную силу, создаваемую самолетом, в форме блок-схемы, в соответствии с иллюстративным вариантом осуществления;
на фиг. 4 показана иллюстрация системы управления сваливанием, реализованной в системе управления полетом, в форме блок-схемы, в соответствии с иллюстративным вариантом осуществления;
на фиг. 5 показана иллюстрация логической схемы для использования при идентификации скорости аварийного оповещения, в соответствии с иллюстративным вариантом осуществления;
на фиг. 6 показана иллюстрация логической схемы для идентификации угла атаки аварийного оповещения в соответствии с иллюстративным вариантом осуществления;
на фиг. 7 показана иллюстрация логической схемы, используемой для идентификации смещения компенсации числа Маха, в соответствии с иллюстративным вариантом осуществления;
на фиг. 8 показана иллюстрация логической схемы для идентификации минимальной скорости маневра во время маневра поворота в соответствии с иллюстративным вариантом осуществления;
на фиг. 9 показана иллюстрация логической схемы для идентификации скорости аварийного оповещения в соответствии с иллюстративным вариантом осуществления;
на фиг. 10 показана иллюстрация логической схемы для генерирования аварийного оповещения в соответствии с иллюстративным вариантом осуществления;
на фиг. 11 показана иллюстрация таблицы для идентификации коэффициента подъемной силы в соответствии с иллюстративным вариантом осуществления;
на фиг. 12 показана иллюстрация графика коэффициента подъемной силы, в зависимости от числа Маха, в соответствии с иллюстративным вариантом осуществления;
на фиг. 13 показана иллюстрация процесса управления полетом самолета, в форме блок-схемы, в соответствии с иллюстративным вариантом осуществления; и
на фиг. 14 показана иллюстрация системы обработки данных в соответствии с иллюстративным вариантом осуществления.
Осуществление изобретения
В иллюстративных вариантах осуществления можно распознавать и учитывать один или больше моментов. Например, в иллюстративных вариантах осуществления распознается и учитывается, что в некоторых доступных в настоящее время системах аварийного оповещения значения скорости аварийного оповещения, используемые для генерирования аварийного оповещения, основаны на предположении, что подъемная сила, генерируемая самолетом, остается, по существу, постоянной во время полета. Другими словами, фиксированный коэффициент подъемной силы аварийного оповещения используется для идентификации скорости аварийного оповещения для самолета. Этот фиксированный коэффициент подъемной силы аварийного оповещения может представлять собой некоторую выбранную величину, которая ниже, чем прогнозируемый коэффициент подъемной силы сваливания для самолета. Однако в иллюстративных вариантах осуществления распознается и учитывается, что фактический коэффициент подъемной силы самолета может изменяться при изменении состояния самолета во время полета. Кроме того, скорость сваливания самолета может изменяться при изменении коэффициента подъемной силы для самолета.
Например, коэффициент подъемной силы для выбранного угла атаки может уменьшаться при увеличении числа Маха самолета. Используемое здесь число Маха самолета представляет скорость самолета во время полета, разделенную на локальную скорость звука. Число Маха самолета может изменяться в зависимости от состояния воздуха вокруг самолета. Такое состояние может включать в себя, например, температуру и/или давление.
В представленных вариантах осуществления распознается и учитывается, что фиксированный коэффициент подъемной силы аварийного оповещения, используемый некоторыми доступными в настоящее время системами аварийного оповещения, может соответствовать значениям скорости аварийного оповещения, которые выше, чем требуются для взлета и посадки. Кроме того, в иллюстративных вариантах осуществления распознается и учитывается, что в некоторых случаях во время полета скорость аварийного оповещения, идентифицированная при использовании фиксированного коэффициента подъемной силы аварийного оповещения, может быть ниже, чем скорость сваливания самолета. Следовательно, аварийное оповещение может не быть сгенерировано до того, как самолет достигнет скорости сваливания самолета. Без такого аварийного оповещения оператор самолета может непреднамеренно перевести самолет в состояние сваливания при выполнении маневров, необходимых для выполнения задачи.
Кроме того, в различных иллюстративных вариантах осуществления распознается и учитывается, что некоторые используемые в настоящее время системы аварийного оповещения генерируют аварийное оповещение на основе угла атаки самолета. Например, такие системы аварийного оповещения могут генерировать аварийное оповещение, когда угол атаки самолета больше, чем угол атаки аварийного оповещения. В представленных вариантах осуществления распознается и учитывается, что угол атаки аварийного оповещения, используемый в таких применяемых в настоящее время системах аварийного оповещения, может не учитывать изменения коэффициента подъемной силы сваливания самолета и/или состояния самолета.
Таким образом, в иллюстративных вариантах осуществления предусмотрены способ и устройство для идентификации скорости аварийного оповещения для самолета, с требуемым уровнем точности. В частности, в разных иллюстративных вариантах осуществления предусмотрена система управления сваливанием, выполненная с возможностью идентификации скорости аварийного оповещения для самолета на основе коэффициента подъемной силы аварийного оповещения для самолета, который может изменяться в ответ на состояние изменения самолета. В одном иллюстративном варианте осуществления предусмотрен способ управления полетом самолета. Угол атаки аварийного оповещения для самолета идентифицируют, используя значение скорости аварийного оповещения, подаваемое по цепи обратной связи для самолета. Коэффициент подъемной силы аварийного оповещения идентифицируют, используя угол атаки аварийного оповещения. Скорость аварийного оповещения для самолета рассчитывают, используя коэффициент подъемной силы аварийного оповещения и скорректированный коэффициент подъемной силы для самолета. Скорость аварийного оповещения используется как скорость аварийного оповещения обратной связи при идентификации угла атаки аварийного оповещения.
Со ссылкой теперь на чертежи и, в частности, со ссылкой на фиг. 1, представлена иллюстрация самолета, в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере самолет 100 имеет крыло 102 и крыло 104, прикрепленные к корпусу 106. Самолет 100 включает в себя двигатель 108, закрепленный на крыле 102, и двигатель 110, закрепленный на крыле 104. Корпус 106 имеет участок 112 хвоста. Горизонтальный стабилизатор 114, горизонтальный стабилизатор 116 и вертикальный стабилизатор 118 установлены на участке 112 хвоста корпуса 106.
Самолет 100 представляет собой пример самолета, в котором может быть воплощена система управления сваливанием, в соответствии с иллюстративным вариантом осуществления. Система управления сваливанием может использоваться для идентификации скорости аварийного оповещения для самолета, которая может изменяться в ответ на изменение состояния самолета. В частности, в системе управления сваливанием используется коэффициент подъемной силы, который изменяется на основе изменений состояния самолета во время полета. В результате такая система управления сваливанием выполнена с возможностью идентификации скорости аварийного оповещения, при которой учитываются изменения состояния самолета во время полета и которая постоянно остается выше скорости сваливания самолета.
Далее, при использовании переменного коэффициента подъемной силы аварийного оповещения может быть идентифицирована скорость аварийного оповещения, которая менее консервативна, чем скорость аварийного оповещения, идентифицированная с использованием фиксированного коэффициента подъемной силы аварийного оповещения. Другими словами, скорость аварийного оповещения, идентифицированная с использованием переменного коэффициента подъемной силы аварийного оповещения, может быть ниже, чем скорость аварийного оповещения, идентифицированная с использованием фиксированного коэффициента подъемной силы аварийного оповещения. Следовательно, возможности маневрирования самолета могут быть повышены. В частности, оператор может иметь возможность выполнять больше маневров с самолетом до получения аварийного оповещения. Кроме того, длина взлета и длина посадки, требуемые для самолета, могут быть уменьшены таким образом, что самолетом можно управлять в большем количестве аэропортов.
Обращаясь теперь к фиг. 2, можно видеть иллюстрацию самолета в среде самолета, в форме блок-схемы, которая представлена в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере окружающая среда самолета 200 включает в себя самолет 202. Самолет 100 на фиг. 1 представляет собой пример одного варианта осуществления самолета 202, представленного в виде блок-схемы на фиг. 2.
Как представлено, самолет 202 генерирует подъемную силу 204 во время полета в воздухе 205. На подъемную силу 204 может влиять множество факторов 206 во время полета самолета 202. Используемый здесь термин "множество" элементов означает один или больше элементов. Например, множество факторов 206 может представлять собой один или больше факторов подъемной силы. Множество факторов 206 может включать в себя, по меньшей мере, один из множества факторов 208 самолета, множества факторов 210 движения и множества факторов 212 окружающей среды.
Используемая здесь фраза "по меньшей мере, одно из следующего", при использовании со списком элементов, означает, что могут использоваться различные комбинации из одного или больше из представленных в виде списка элементов, и только один из каждого элемента в списке может быть необходимым. Например, "по меньшей мере, одно из следующего: элемент А, элемент В и элемент С" может включать в себя, без ограничений, элемент А или элемент А и элемент В. Этот пример также может включать в себя элемент А, элемент В и элемент С, или элемент В и элемент С. В других примерах, "по меньшей мере, одно из следующего" может, например, представлять собой, без ограничений, два элемента А, одно из следующего: элемент В и десять элементов С; четыре элемента В и семь элементов С; или некоторую другую их соответствующую комбинацию.
Множество факторов 208 самолета может включать в себя один или больше факторов, относящихся к размеру и/или форме самолета 202. Множество факторов 210 движения может включать в себя один или больше факторов, относящихся к движению самолета 202 в воздухе 205. Кроме того, множество факторов 212 окружающей среды может включать в себя один или больше факторов, относящихся к воздуху 205.
В этих иллюстративных примерах самолет 202 содержит систему 214 датчиков и систему 216 управления сваливанием. Система 214 датчиков выполнена с возможностью отслеживания множества факторов 206, в то время как система 216 управления сваливанием выполнена с возможностью аварийного оповещения оператора 217 самолета 202 о том, что может возникнуть нежелательная ситуация во время полета самолета 202, на основе множества факторов 206.
Как представлено, система 214 датчика содержит множество датчиков 218. Множество датчиков 218 может включать в себя, например, без ограничений, по меньшей мере, одно из следующего: индикатор угла атаки, датчик положения, датчик температуры, датчик движения и другие соответствующие типы датчиков.
Множество датчиков 218 может быть выполнено с возможностью генерировать данные 220 для, по меньшей мере, части из множества факторов 206. Данные 220 могут включать в себя, например, без ограничений, значения для множества факторов 206. В некоторых случаях, по меньшей мере, часть данных 220 может генерироваться непрерывно, по существу, в режиме реального времени. В других примерах часть данных 220 может генерироваться в установленные интервалы времени.
Система 216 управления сваливанием выполнена с возможностью приема данных 220 из системы 214 датчика. Система 216 управления сваливанием выполнена с возможностью идентификации ограничений для полета самолета 202, используя данные 220 таким образом, что вероятность сваливания самолета 202 во время полета может быть уменьшена.
В этих иллюстративных примерах система 216 управления сваливанием может быть воплощена с использованием аппаратных средств, программных средств или комбинации этих двух подходов. Например, система 216 управления сваливанием может быть воплощена в компьютерной системе 222. Компьютерная система 222 может содержать один или больше компьютеров. Когда присутствует больше чем один компьютер, эти компьютеры могут сообщаться между собой с возможностью передачи данных, например, через сеть.
Как представлено, система 216 управления сваливанием содержит генератор 224 порогового значения и генератор 226 аварийного оповещения. В этих иллюстративных примерах генератор 224 порогового значения выполнен с возможностью генерировать набор пороговых значений 228, используя данные 220, принятые из системы 214 датчика. Используемый здесь термин "набор" элементов означает один или больше элементов. Например, набор пороговых значений 228 может содержать одно или больше пороговых значений аварийного оповещения. Генератор 226 аварийного оповещения может генерировать аварийное оповещение 230, когда одно или больше пороговых значений в наборе пороговых значений 228 пересекаются.
В этих иллюстративных примерах набор пороговых значений 228 может включать в себя, по меньшей мере, одно из следующего: пороговое значение 231 угла атаки, пороговое значение 232 коэффициента подъемной силы и пороговое значение 234 скорости. Пороговое значение 231 угла атаки представляет собой угол атаки, который меньше, чем критический угол атаки для самолета 202, на некоторую выбранную величину. Критический угол атаки представляет собой угол атаки, при котором самолет 202 может перейти в сваливание, учитывая текущее состояние самолета 202 во время полета.
Пороговое значение 232 коэффициента подъемной силы представляет собой коэффициент подъемной силы, который меньше, чем коэффициент подъемной силы сваливания для самолета 202, на некоторую выбранную величину. Коэффициент подъемной силы сваливания представляет собой коэффициент подъемной силы, при котором самолет 202 может перейти в сваливание, учитывая текущее состояние самолета 202 во время полета.
Кроме того, пороговое значение 234 скорости представляет собой скорость, которая больше, чем скорость сваливания для самолета 202. Скорость сваливания представляет собой скорость, при которой самолет 202 может перейти в сваливание, учитывая текущее состояние самолета 202. Пороговое значение 234 скорости может быть представлено, используя множество разных способов. Например, пороговое значение 234 скорости может быть выражено в узлах, милях в час, в виде числа Маха, или используя некоторый другой тип представления скорости.
Набор пороговых значений 228 может быть сгенерирован, используя множество разных подходов. В одном иллюстративном примере, генератор 224 порогового значении использует данные 220 для идентификации угла 236 атаки и профиля 238 крыла. Используемый здесь угол 236 атаки представляет собой угол между линиями хорды крыльев самолета 202 и вектором, представляющим относительное движение между самолетом 202 и воздухом 205. Линия хорды крыла, используемая здесь, представляет собой воображаемую прямую линию между задней кромкой крыла и центром кривизны передней кромки поперечного сечения профиля 238 крыла.
В этих примерах профиль 238 крыла также может называться "аэродинамическим профилем" или "конфигурацией крыла". Профиль 238 крыла может включать в себя профиль крыла самолета 202 и любые закрылки, предкрылки и/или другие поверхности управления, закрепленные на крыле.
Генератор 224 порогового значения использует угол 236 атаки и профиль 238 крыла для идентификации коэффициента 240 подъемной силы для самолета 202. Коэффициент 240 подъемной силы представляет собой текущее значение коэффициента подъемной силы для самолета 202. Кроме того, генератор 224 порогового значения использует профиль 238 крыла и угол 242 атаки аварийного оповещения для идентификации коэффициента 244 подъемной силы аварийного оповещения. Угол 242 атаки аварийного оповещения может быть идентифицирован генератором 224 порогового значения, используя контур 248 обратной связи.
В некоторых иллюстративных примерах коэффициент 244 подъемной силы аварийного оповещения может быть идентифицирован таким образом, что коэффициент 244 подъемной силы аварийного оповещения всегда, по существу, ниже на определенный процент, чем текущий коэффициент подъемной силы сваливания для самолета 202. В некоторых случаях такой выбранный процент может составлять приблизительно пять процентов, десять процентов или некоторое другое выбранное процентное значение. Таким образом, когда коэффициент подъемной силы сваливания для самолета 202 изменяется, на основе изменений состояния самолета 202, пороговое значение 232 коэффициента подъемной силы также изменяется.
В этом иллюстративном примере коэффициент 244 подъемной силы аварийного оповещения и коэффициент 240 подъемной силы используются для идентификации скорости 246 аварийного оповещения. Скорость 246 аварийного оповещения может использоваться как обратная связь 248 для идентификации следующего угла 242 атаки аварийного оповещения. Следующий угол 242 атаки аварийного оповещения представляет собой угол атаки для самолета 202 в момент времени после текущего момента времени. Следовательно, обратная связь 248, используемая для идентификации угла 242 атаки аварийного оповещения, представляет собой ранее идентифицированную скорость 246 аварийного оповещения в этом иллюстративном примере. Таким образом, угол 242 атаки аварийного оповещения и коэффициент 244 подъемной силы аварийного оповещения можно отрегулировать на основе множества изменений текущего состояния самолета 202 во время полета. Эти изменения могут включать в себя изменения одного или больше из множества факторов 206.
В некоторых иллюстративных примерах скорость 246 аварийного оповещения может быть идентифицирована для конкретного маневра самолета 202. Например, скорость 246 аварийного оповещения может быть идентифицирована для маневра поворота самолета 202, при котором самолет 202 летит с углом поперечного наклона больше, чем ноль градусов. Такая скорость аварийного оповещения может быть другой, чем скорость аварийного оповещения для самолета 202 во время, по существу, горизонтального полета.
Генератор 224 порогового значения может использовать множество структур 250 данных и/или модель 252 при идентификации коэффициента 240 подъемной силы, угла 242 атаки аварийного оповещения, коэффициента 244 подъемной силы аварийного оповещения, скорости 246 аварийного оповещения и/или других типов параметров. Множество структур 250 данных может принимать форму, например, без ограничений, множества таблиц 251. Конечно, в других иллюстративных примерах структура данных во множестве структур 250 данных может содержать, по меньшей мере, одну из базы данных, таблицы, однородного файла, списка со связями, электронной таблицы, модели, ассоциативного запоминающего устройства или некоторого другого соответствующего типа структуры данных. Модель 252 может содержать, например, без ограничений, любое количество уравнений, алгоритмов и/или процессов для расчета значений для этих параметров.
Генератор 224 порогового значения может использовать, по меньшей мере, одно из следующего: угол 242 атаки аварийного оповещения, коэффициент 244 подъемной силы аварийного оповещения и скорости 246 аварийного оповещения в качестве порогового значения 231 угла атаки, пороговое значение 232 коэффициента подъемной силы и пороговое значение 234 скорости, соответственно, для формирования набора пороговых значений 228. Генератор 224 порогового значения подает набор пороговых значений 228 в генератор 226 аварийного оповещения.
В зависимости от варианта осуществления генератор 224 порогового значения может непрерывно генерировать набор пороговых значений 228 во время полета самолета 202, в ответ на возникновение периодического события и/или непериодического события. Кроме того, набор пороговых значений 228 может учитывать изменения состояния самолета 202 во время полета в отношении множества факторов 206. Кроме того, набор пороговых значений 228 может учитывать маневры, такие как повороты, выполняемые самолетом 202. Таким образом, набор пороговых значений 228 может быть динамически идентифицирован для самолета 202 во время полета.
Генератор 226 аварийного оповещения может использовать, по меньшей мере, одно из следующего: пороговое значение 231 угла атаки, пороговое значение коэффициента подъемной силы 232 и пороговое значение 234 скорости в наборе пороговых значений 228 для формирования аварийного оповещения 230. В этих иллюстративных примерах аварийное оповещение 230 может принимать форму, по меньшей мере, одно из следующего: визуальное аварийное оповещение, звуковое аварийное оповещение, тактильное аварийное оповещение и некоторый другой тип аварийного оповещения. Аварийное оповещение 230 обозначает потенциальное состояние 256 сваливания. В частности, аварийное оповещение 230 может обозначать самолет 202, который достиг потенциального состояния 256 сваливания. Когда самолет 202 достигает потенциального состояния 256 сваливания, самолет 202 может быть близок к переходу в сваливание. Например, когда самолет 202 находится в потенциальном состоянии 256 сваливания, самолет 202 может приблизиться, по меньшей мере, к одному из критических углов атаки, коэффициентов подъемной силы сваливания и/или скоростей сваливания для самолета 202.
Аварийное оповещение 230 может быть сгенерировано таким образом, что оно будет детектировано оператором 217 самолета 202. Оператор 217 самолета 202 может выполнять любое количество маневров для предотвращения или уменьшения возможности сваливания самолета 202.
Таким образом, иллюстративные варианты осуществления предоставляют систему для управления полетом самолета 202. В частности, система 216 управления сваливанием позволяет представлять для оператора 217 самолета 202 аварийное оповещение 230, обозначающее потенциальное состояние 256 сваливания, более точно по сравнению с некоторыми доступными в настоящее время системами управления сваливанием. Кроме того, система 216 управления сваливанием может увеличивать диапазон скоростей, при которых может работать самолет 202, количество маневров, которые могут быть выполнены самолетом 202, или одновременно увеличивать диапазон скоростей, на которых может работать самолет 202, и увеличивать количество маневров, которые могут быть выполнены самолетом 202. Это увеличение, по меньшей мере, одного из диапазонов скоростей и количеств маневров может быть предусмотрено путем обновления набора пороговых значений 228 для генерирования аварийного оповещения 230 на основе текущего состояния самолета 202.
Далее, со ссылкой на фиг. 3, будет представлена иллюстрация множества факторов 206, которые влияют на подъемную силу 204, образуемую самолетом 202, в форме блок-схемы, в соответствии с иллюстративным вариантом осуществления. Как представлено, множество факторов 206 может обозначать множество факторов 208 самолета, множество факторов 210 движения и множество факторов 212 окружающей среды.
В этих иллюстративных примерах множество факторов 208 самолета может включать в себя, по меньшей мере, одно из следующего: вес 302, угол 304 атаки, профиль 306 крыла, угол 308 поперечного наклона, нормальный фактор 310 нагрузки и множество наружных подвесок 312. Первоначально вес 302 может представлять собой вес брутто самолета 202 по фиг. 2 во время взлета. Вес 302 может изменяться по мере полета самолета 202. Например, вес 302 может изменяться по мере все большего потребления топлива во время полета.
Угол 304 атаки может представлять собой угол между линиями хорды крыльев самолета 202 и вектором, представляющим относительное движение между самолетом 202 и воздухом 205 на фиг. 2. Данные 220 об угле 304 атаки могут включать в себя один или больше результатов измерения, полученных от одного или больше флюгерных датчиков угла атаки на самолете 202. Генератор 224 порогового значения на фиг. 2 может использовать эти результаты измерений для расчета угла 236 атаки на фиг. 2. Например, генератор 224 порогового значения может выполнять коррекцию результатов измерений, сгенерированных одним или больше флюгерными датчиками угла атаки, на основе расстояния от этих флюгерных датчиков угла атаки до центра тяжести самолета 202. Таким образом, угол 236 атаки на фиг. 2 может представлять собой скорректированный угол атаки.
В этих иллюстративных примерах профиль 306 крыла самолета 202 может быть основан, например, без ограничений, на положении поверхностей 314 управления, прикрепленных к одному или больше крыльям самолета 202. Поверхности управления, прикрепленные к этим крыльям, могут включать в себя, например, закрылки, предкрылки и/или другие соответствующие типы поверхностей управления. В одном иллюстративном примере профиль 306 крыла самолета 202 может быть основан на, по меньшей мере, одном из положений 315 закрылка и положений 316 предкрылка. Положение 315 закрылка представляет собой положение закрылка на крыле самолета 202. Положение 316 предкрылка представляет собой положение предкрылка на самолете 202.
Угол 308 поперечного наклона представляет собой угол, под которым наклонен самолет 202 вокруг продольной оси через фюзеляж самолета 202 относительно пути движения самолета 202. Нормальный фактор 310 нагрузки представляет собой вертикальную нагрузку, воздействующую на самолет 202, и может быть измерен в единицах g. Количество наружных подвесок 312 может представлять собой один или больше компонентов, прикрепленных к крылу, фюзеляжу или некоторому другому участку самолета 202, которые могут вызывать изменения подъемной силы 204. Эти компоненты могут включать в себя, например, без ограничений, по меньшей мере, одно из следующего: подвесной топливный бак, контейнер наружной подвески, пилон и некоторые другие типы компонентов.
Как представлено, количество факторов 210 движения может включать в себя скорость 318. Скорость 318 может быть представлена, как, по меньшей мере, одно, например, из числа 320 Маха, истинной скорости 322 воздуха и калиброванной скорости 324 воздуха. Конечно, в других иллюстративных примерах, скорость 318 может быть представлена как приборная воздушная скорость, эквивалентная воздушная скорость или некоторая другая мера скорости.
Множество факторов 212 окружающей среды может включать в себя, по меньшей мере, одну из температуры 326 воздуха, статического давления 328 и давления 330 нагнетаемого воздуха. Температура 326 воздуха представляет собой температуру воздуха 205 снаружи самолета 202. Статическое давление 328 представляет собой давление, измеряемое внутри порта устройства, такого как статическая трубка Пито на самолете 202 или порт статической струи. Давление 330 нагнетания воздуха представляет собой давление, вызываемое воздухом 205, который движется в статической трубке Пито на самолете 202.
Факторы, описанные со ссылкой на фиг. 3, предназначены только для использования в качестве примеров некоторых типов факторов среди множества факторов 206, которые могут влиять на подъемную силу 204, создаваемую самолетом 202. Подразумевается, что эти примеры не ограничивают или не определяют факторы, которые могут влиять на подъемную силу 204, и/или факторы, которые могут учитываться системой 216 управления сваливанием на фиг. 2.
Теперь, на фиг. 4, представлена иллюстрация системы 216 управления сваливанием, воплощенная в системе управления полетом, в форме блок-схемы, в соответствии с иллюстративным вариантом осуществления. Система 216 управления сваливанием воплощена в системе 400 управления полетом в этом иллюстративном примере. Как представлено, по меньшей мере, часть системы 400 управления полетом может быть воплощена в компьютерной системе 222.
Как представлено, система 400 управления полетом включает в себя систему 216 управления сваливанием, множество контроллеров 402 системы, множество устройств 403 управления полетом и автопилот 404. Множество контроллеров 402 системы может быть воплощено с использованием аппаратных средств, программных средств или комбинации этих двух подходов. В одном иллюстративном варианте осуществления множество контроллеров 402 системы включает в себя контроллер 406 двигателя и контроллер 408 поверхности управления.
Контроллер 406 двигателя выполнен с возможностью управления множеством двигателей 410 для самолета 202. Множество двигателей 410 может включать в себя один или больше двигателей, выполненных с возможностью обеспечения силы, требуемой для движения самолета 202. Контроллер 406 двигателя может управлять работой множества двигателей 410. Например, контроллер 406 двигателя может управлять величиной силы, генерируемой множеством двигателей 410.
Контроллер 408 поверхности управления выполнен с возможностью управления множеством поверхностей 412 управления для самолета 202. Множество поверхностей 412 управления может включать в себя одну или больше подвижных поверхностей, которые могут быть установлены для управления полетом самолета 202. Контроллер 408 поверхности управления может быть выполнен с возможностью управления положением и конфигурацией множества поверхностей 412 управления.
В этих иллюстративных примерах множество поверхностей 412 управления и множество двигателей 410 не рассматриваются как часть системы 400 управления полетом. Однако, в других иллюстративных примерах, система 400 управления полетом может включать в себя множество поверхностей 412 управления и множество двигателей 410.
Множество устройств 403 управления полетом может включать в себя один или больше физических элементов управления, которые могут использоваться пилотом, таким как оператор 217 на фиг. 2, для управления работой самолета 202. Ручка 413 управления представляет собой пример одного из множества устройств 403 управления полетом. Оператор 217 может управлять самолетом 202, выполняя манипуляции с ручкой 413 управления. В этом иллюстративном примере множество устройств 403 управления полетом могут связываться с контроллером 406 двигателя и контроллером 408 поверхности управления для управления полетом самолета 202.
Автопилот 404 представляет собой систему, которая выполнена с возможностью управления полетом самолета 202. Например, автопилот 404 может связываться с контроллером 406 двигателя и контроллером 408 поверхности управления для управления полетом самолета 202. Автопилот 404 может управлять полетом самолета 202 на основе входной команды пилота, полетного плана или некоторой их комбинации.
В этом иллюстративном примере, аварийное оповещение 230 может быть сгенерировано генератором 226 аварийного оповещения во множестве разных форм. Например, аварийное оповещение 230 может содержать, по меньшей мере, одно из следующего: тактильное аварийное оповещение 414, визуальное аварийное оповещение 416, звуковое аварийное оповещение 418 и сообщение 420. Тактильное аварийное оповещение 414 может представлять собой, например, без ограничений, команду, которую передают в вибросигнализатор 422 рукоятки управления. Вибросигнализатор 422 рукоятки управления представляет собой устройство, прикрепленное к ручке 413 управления и выполненное с возможностью тряски или вибрации ручки 413 управления. В частности, вибросигнализатор 422 рукоятки управления обеспечивает сотрясение ручки 413 управления в ответ на прием тактильного аварийного оповещения 414.
Визуальное аварийное оповещение 416 и/или звуковое аварийное оповещение 418 могут быть переданы в систему 424 пилотажных приборов на самолете 202. Система 424 пилотажных приборов может содержать, по меньшей мере, одну систему 426 дисплея и аудиосистему 428. Система 426 дисплея может содержать любое количество устройств дисплея, мониторов, сенсорных экранов, измерительных приборов, световых индикаторов и/или других типов устройств визуальной индикации. Аудиосистема 428 может содержать любое количество громкоговорителей, микрофонов и/или других типов звуковых устройств.
Визуальное аварийное оповещение 416 может содержать, например, по меньшей мере, одно из следующего: мигающий цвета, выделение полужирным шрифтом, изменение шрифта, анимация, мигающие числа, мигающий свет или некоторый другой соответствующий тип индикатора. Звуковое аварийное оповещение 418 может содержать, например, без ограничений, тон, словесное сообщение или некоторый другой соответствующий тип звукового аварийного оповещения.
Сообщение 420 может быть передано в автопилот 404. Сообщение 420 может содержать, по меньшей мере, одно из следующего: запрос, команда или некоторый другой соответствующий тип сообщения. В ответ на прием сообщения 420 автопилот 404 выполнен с возможностью автоматически предпринимать действия по управлению множеством контроллеров 402 системы и/или множеством устройств 403 управления полетом, без необходимости ввода команды оператора 217 для предотвращения сваливания самолета 202.
Например, автопилот 404 может посылать команды на множество поверхностей 412 управления для управления конфигурацией одной или больше поверхностей управления. В качестве одного иллюстративного примера, автопилот 404 может управлять, по меньшей мере, одним из следующего: руль высоты 430 и предкрылки 432 среди множества поверхностей 412 управления для предотвращения сваливания самолета 202. Более конкретно, автопилот 404 может увеличивать степень отклонения рулей 430 высоты, для уменьшения угла атаки самолета 202. Кроме того, автопилот 404 может подавать команды в контроллер 408 поверхности управления для выдвижения предкрылков 432 на передней кромке крыла самолета 202.
В иллюстрациях самолета 202 в окружающей среде 200 самолета на фиг. 2, множество факторов 206 на фиг. 3 и система 400 управления полетом на фиг. 4 не подразумевают каких-либо физических или архитектурных ограничений в отношении подхода, в соответствии с которым может быть воплощен иллюстративный вариант осуществления. Другие компоненты в дополнение к представленным или вместо представленных могут использоваться. Некоторые компоненты могут быть необязательными. Кроме того, блоки представлены для иллюстрации некоторых функциональных компонентов. Один или больше из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на разные блоки при воплощении в иллюстративном варианте осуществления.
Например, генератор 226 аварийного оповещения и генератор 224 порогового значения могут быть скомбинированы. В некоторых иллюстративных примерах система 216 управления сваливанием может использовать только модель 252 и может не использовать множество структур 250 данных. В других иллюстративных примерах генератор 224 порогового значения может модифицировать угол 242 атаки аварийного оповещения, коэффициент 244 подъемной силы аварийного оповещения и/или скорость 246 аварийного оповещения для идентификации порогового значения 231 угла атаки, порогового значения 232 коэффициента подъемной силы и/или порогового значения 234 скорости соответственно.
На фиг. 5 представлена иллюстрация логической схемы для использования при идентификации скорости аварийного оповещения в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере логическая схема 500 выполнена с возможностью идентификации скорости аварийного оповещения, такой как, например, скорость 246 аварийного оповещения по фиг. 2. В этом иллюстративном примере логическая схема 500 может быть воплощена в генераторе 224 порогового значения в системе 216 управления сваливанием по фиг. 2.
Как представлено, логическая схема 500 включает в себя фильтр 502, модуль 504 поиска в таблице, модуль 506 поиска в таблице, сумматор 508, делитель 510, модуль 512 квадратного корня, умножитель 514 и фильтр 516. В этом иллюстративном примере, фильтр 502 принимает скорректированный угол 520 атаки в качестве входных данных. Скорректированный угол 520 атаки представляет собой пример одного варианта осуществления угла 236 атаки по фиг. 2. Скорректированный угол 520 атаки может представлять собой, например, без ограничений, результаты измерения текущего угла атаки, взятые из угла индикатора флюгерного датчика угла атаки, скорректированного для угла наклона самолета.
В этом иллюстративном примере фильтр 502 выполнен в форме фильтра низкой частоты. В частности, фильтр 502 представляет собой фильтр низкой частоты первого порядка. Например, фильтр 502 может быть воплощен с использованием преобразования Лапласа, такого как 1/(0,5S+1), которое умножают на скорректированный угол 520 атаки.
Фильтр 502 генерирует фильтрованный угол 522 атаки как выходные данные и передает фильтрованный угол 522 атаки в модуль 504 поиска в таблице как входные данные. Модуль 504 поиска в таблице также принимает положение 524 фиксатора закрылка как входные данные. Положение 524 фиксатора закрылка представляет собой пример одного варианта осуществления для индикатора профиля 238 крыла на фиг. 2. Как описано, положение 524 фиксатора закрылка представляет собой текущее положение устройства управления полетом, которое управляет конфигурацией закрылков, закрепленных на крыльях самолета, и, таким образом, профилем крыла самолета. Модуль 504 поиска в таблице использует фильтрованный угол 522 атаки, положение 524 фиксатора закрылка и таблицу для идентификации исходного коэффициента 526 подъемной силы. Такая таблица может, например, без ограничения, представлять собой одну из множества таблиц 251 на фиг. 2. В некоторых иллюстративных примерах модуль 504 поиска в таблице также может использовать число 542 Маха в качестве входных данных.
Исходный коэффициент 526 подъемной силы посылают в сумматор 508f как входные данные, вместе с Δ-коэффициентом 528 подъемной силы. Сумматор 508 выполнен с возможностью суммировать исходный коэффициент 526 подъемной силы и Δ-коэффициентом 528 подъемной силы для генерирования коэффициента 530 подъемной силы. Коэффициент 530 подъемной силы представляет собой пример одного варианта осуществления для коэффициента 240 подъемной силы на фиг. 2. В этом иллюстративном примере Δ-коэффициент 528 подъемной силы представляет собой коррекцию исходного коэффициента 526 подъемной силы, идентифицированную с помощью системы управления полетом на самолете. Сумматор 508 передает коэффициент 530 подъемной силы в делитель 510.
Кроме того, положение 524 фиксатора закрылка также может быть передано, как входные данные, в модуль 506 поиска в таблице, вместе с углом 532 атаки аварийного оповещения. В некоторых иллюстративных примерах, число 544 Маха аварийного оповещения подают в модуль 506 поиска в таблице. Угол 532 атаки аварийного оповещения представляет собой пример одного варианта выполнения угла 242 атаки аварийного оповещения на фиг. 2. Генерирование угла 532 атаки аварийного оповещения более подробно описано ниже со ссылкой на фиг. 6.
В этом иллюстративном примере модуль 506 поиска в таблице может использовать ту же таблицу, которая используется модулем 504 поиска в таблице, для идентификации коэффициента 534 подъемной силы аварийного оповещения на основе положения 524 фиксатора закрылка и угла 532 атаки аварийного оповещения. Коэффициент 534 подъемной силы аварийного оповещения представляет собой пример одного варианта осуществления для коэффициента 244 подъемной силы аварийного оповещения по фиг. 2.
Коэффициент 534 подъемной силы аварийного оповещения подают как входные данные в делитель 510. Делитель 510 выполнен с возможностью деления коэффициента 530 подъемной силы на коэффициент 534 подъемной силы аварийного оповещения для генерирования фактора 536 подъемной силы. Фактор 536 подъемной силы подают как входные данные в модуль 512 квадратного корня. Модуль 512 квадратного корня получает квадратный корень фактора 536 подъемной силы и генерирует фактор 538 скорости. В этом иллюстративном примере фактор 538 скорости подают как входные данные, в умножитель 514, вместе с отфильтрованным числом 540 Маха. Умножитель 514 умножает отфильтрованное число 540 Маха на коэффициент 538 скорости для генерирования числа 544 Маха аварийного оповещения. В этом иллюстративном примере, число 544 Маха аварийного оповещения представляет собой пример одного варианта осуществления скорости 246 аварийного оповещения по фиг. 2.
Как представлено, отфильтрованное число 540 Маха генерируется с помощью фильтра 516. В этом иллюстративном примере фильтр 516 принимает форму фильтра низкой частоты. В частности, фильтр 516 может представлять собой фильтр низкой частоты первого порядка. Фильтр 516 выполнен с возможностью фильтрации числа 542 Маха, для генерирования фильтрованного числа 540 Маха. В этих иллюстративных примерах число 542 Маха представляет собой представление текущей скорости самолета, откалиброванной в соответствии с температурой воздуха за пределами самолета и давлением. В частности, число 542 Маха представляет собой текущее число Маха для самолета.
В этом иллюстративном примере, по меньшей мере, одно из следующего: угол 532 атаки аварийного оповещения, коэффициент 534 подъемной силы аварийного оповещения и число 544 Маха аварийного оповещения - используется как пороговое значение для генерирования аварийного оповещения. Например, угол 532 атаки аварийного оповещения может использоваться как пороговое значение угла атаки такое, как пороговое значение 231 угла атаки на фиг. 2, таким образом, что аварийное оповещение генерируют всякий раз, когда самолет имеет угол атаки, который больше, чем угол 532 атаки аварийного оповещения. В некоторых случаях число 544 Маха аварийного оповещения используется как пороговое значение скорости, такое как пороговое значение 234 скорости на фиг. 2, таким образом, что аварийное оповещение генерируется всякий раз, когда самолет достигает скорости, которая ниже числа 544 Маха аварийного оповещения.
Возвращаясь теперь к фиг. 6, можно видеть иллюстрацию логической схемы для идентификации угла атаки аварийного оповещения, представленной в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере логическая схема 600 выполнена с возможностью идентификации угла 532 атаки аварийного оповещения по фиг. 5. Логическая схема 600 может быть воплощена в генераторе 224 порогового значения по фиг. 2.
Как представлено, логическая схема 600 включает в себя модуль 602 поиска в таблице и сумматор 604. Модуль 602 поиска в таблице принимает положение 524 фиксатора закрылка как входные данные и таблицу для идентификации исходного угла 610 атаки аварийного оповещения. Эта таблица может, например, без ограничения, представлять собой одну из множества таблиц 251 на фиг. 2. Исходный угол 610 атаки аварийного оповещения посылают как входные данные в сумматор 604, вместе со значением смещения 612 компенсации числа Маха, текущим смещением 614 нагрузки на крыло, смещением 616 компенсации воздушного тормоза и множеством других значений смещения 618 угла атаки.
Текущие значения смещения 614 нагрузки на крыло представляют собой коррекцию, которая учитывает текущую наружную подвеску, закрепленную на крыльях самолета. Смещение 612 компенсации числа Маха представляет собой коррекцию, которая учитывает ранее идентифицированное число Маха аварийного оповещения для самолета. Генерирование смещения 612 компенсации числа Маха более подробно описано ниже со ссылкой на фиг. 7.
Смещение 616 компенсации воздушного тормоза представляет собой коррекцию для воздушного тормоза самолета. Множество других значений смещения 618 угла атаки корректируют на основе множества факторов, включая в себя, но без ограничений, положения плоскостей и предкрылков самолета, силы, генерируемой самолетом, и/или других типов факторов.
Сумматор 604 выполнен с возможностью вычитания смещения 612 компенсации числа Маха, вычитания смещения 614 текущей нагрузки на крыло, вычитания смещения 616 компенсации воздушного тормоза и вычитания множества других смещений 618 угла атаки из исходного угла 610 атаки аварийного оповещения для генерирования угла 532 атаки аварийного оповещения. Таким образом, угол 532 атаки аварийного оповещения представляет собой скорректированный угол атаки аварийного оповещения.
Далее, на фиг. 7 представлена иллюстрация логической схемы, используемая для идентификации смещения компенсации числа Маха, в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере логическая схема 700 выполнена с возможностью идентификации смещения 612 компенсации числа Маха на фиг. 6. Логическая схема 700 может быть воплощена в генераторе 224 порогового значения на фиг. 2.
Как представлено, логическая схема 700 включает в себя модуль 702 поиска в таблице, модуль 704 поиска в таблице, модуль 706 поиска в таблице, сумматор 708, умножитель 710, верхний модуль 712 выбора и модуль 714 принятия решения. Модуль 702 поиска в таблице выполнен с возможностью приема числа 544 Маха аварийного оповещения в качестве входных данных. Модуль 702 поиска в таблице использует число 544 Маха аварийного оповещения и таблицу для идентификации смещения 716 числа Маха с поднятыми закрылками. Такая таблица может представлять собой, например, без ограничений, одну из множества таблиц 251 на фиг. 2.
Как модуль 704 поиска в таблице, так и модуль 706 поиска в таблице выполнены с возможностью приема положения 524 фиксатора закрылков в качестве входных данных. Модуль 704 поиска в таблице использует положения 524 фиксатора закрылков и таблицу для идентификации смещения 718 точки пересечения. Эта таблица может представлять собой, например, без ограничений, одну из множества таблиц 251 по фиг. 2. В модуле 706 поиска в таблице используются положения 524 фиксатора закрылка и таблица для идентификации смещения 720 наклона. Эта таблица также может представлять собой, например, без ограничений, одну из множества таблиц 251 на фиг. 2. Смещение 718 точки пересечения и смещение 720 наклона представляют собой значения, используемые как значения смещения, которые соответствуют нижнему положению закрылков самолета.
Смещение 720 наклона и число 544 Маха аварийного оповещения посылают в умножитель 710 в качестве входных данных. Умножитель 710 умножает смещение 720 наклона на число 544 Маха аварийного оповещения для генерирования произведения 722. Произведение 722 и смещение 718 точки пересечения посылают в сумматор 708 как входные данные. Сумматор 708 суммирует смещение 718 точки пересечения и произведение 722 друг с другом для генерирования суммы 724. Сумму 724 посылают в модуль 712 выбора верхнего значения в качестве входных данных. Модуль 712 выбора верхнего значения выполнен с возможностью выбора большего значения из суммы 724 и нулевого значения 726 и вывода этого значения в качестве верхнего значения 727.
Модуль 712 выбора верхнего значения посылает верхнее значение 727 в модуль 714 принятия решения. Модуль 714 принятия решения также принимает значения смещение 716 числа Маха с поднятыми закрылками. Модуль 714 принятия решения использует показатель 728 поднятых закрылков для определения, следует ли вывести значение смещения числа 716 Маха с поднятыми закрылками или верхнее значение 727 в качестве смещения 612 компенсации числа Маха. Значение смещения 612 компенсации числа Маха выводят из модуля 714 принятия решения и посылают в сумматор 604 по фиг. 6.
Таким образом, число 544 Маха аварийного оповещения по фиг. 5 используется как обратная связь при идентификации смещения 612 компенсации числа Маха и, таким образом, угла 532 атаки аварийного оповещения. Другими словами, ранее идентифицированное число 544 Маха аварийного оповещения, на фиг. 5, используется как обратная связь при идентификации значения смещения 612 компенсации следующего числа Маха, на фиг. 7, и, таким образом, следующего угла 532 атаки аварийного оповещения на фиг. 6.
Далее на фиг. 8 представлена иллюстрация логической схемы для идентификации минимальной скорости маневра во время маневра поворота, в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере логическая схема 800 выполнена с возможностью идентификации минимальной скорости маневра, когда самолет выполняет маневр, в частности маневр поворота. Логическая схема 800 может быть воплощена в генераторе 224 порогового значения по фиг. 2.
Как представлено в этом примере, логическая схема 800 включает в себя модуль 801 поиска в таблице, делитель 802, делитель 804, умножитель 806, модуль 808 квадратного корня, умножитель 810, сумматор 812, сумматор 814, умножитель 816 и модуль 818 выбора верхнего значения. Модуль 801 поиска в таблице выполнен с возможностью приема положения 524 фиксатора закрылка и угла 820 атаки аварийного оповещения при маневрировании в качестве входных данных. Угол 820 атаки аварийного оповещения при маневрировании представляет собой пример одного варианта осуществления для угла 242 атаки аварийного оповещения по фиг. 2, но в отношении маневра.
Модуль 801 поиска в таблице использует положение 524 фиксатора закрылка, угол 820 атаки аварийного оповещения при маневрировании и таблицу для идентификации коэффициента 822 подъемной силы аварийного оповещения при маневрировании. Эта таблица может, например, без ограничения, представлять собой одну из множества таблиц 251 на фиг. 2. Коэффициент 822 подъемной силы аварийного оповещения при маневрировании представляет собой пример одного варианта осуществления для коэффициента 244 подъемной силы аварийного оповещения при маневрировании на фиг. 2, но в отношении маневра. Коэффициент 822 подъемной силы аварийного оповещения при маневрировании поступает как входные данные в делитель 802.
Кроме того, делитель 804 выполнен с возможностью приема выбранной нагрузки 824 и коэффициента 826 нагрузки в качестве входных данных. Выбранная нагрузка 824 представляет собой нагрузку, которая представляет минимальные возможности маневрирования самолета. Например, выбранная нагрузка 824 может составлять приблизительно 1,3 g в данном иллюстративном примере, который может представлять минимальные возможности маневрирования на угол приблизительно 40 градусов. Факторы нагрузки представленной выше выбранной нагрузки 824 могут быть получены при более быстром полете, чем с минимальной скоростью маневра. Фактор 826 нагрузки представляет собой отношение подъемной силы самолета к весу самолета. В некоторых случаях, другие факторы могут учитываться при расчете фактора 826 нагрузки. Делитель 804 делит выбранную нагрузку 824 на фактор 826 нагрузки для генерирования фактора 828 маневра.
Коэффициент 530 подъемной силы на фиг. 5 и фактор 828 маневра подают в умножитель 806 как входные данные. Умножитель 806 умножает коэффициент 530 подъемной силы на фактор 828 маневра для генерирования скорректированного коэффициента 830 подъемной силы. Отрегулированный коэффициент 830 подъемной силы поступает в делитель 802 как входные данные.
Делитель 802 делит отрегулированный коэффициент 830 подъемной силы на коэффициент 822 подъемной силы аварийного оповещения при маневрировании для генерирования фактора 832 аварийного оповещения подъемной силы при маневрировании. Как представлено, модуль 808 квадратного корня выполнен с возможностью приема фактора 832 подъемной силы при маневрировании и вывода квадратного корня фактора 832 подъемной силы при маневрировании в качестве фактора 834 скорости маневра. Фактор 834 скорости маневра поступает в умножитель 810, и его умножают на число 542 Маха, для генерирования минимального числа 836 Маха аварийного оповещения при маневрировании. Минимальное число 836 Маха при маневрировании представляет собой пример одного варианта осуществления для скорости 246 аварийного оповещения на фиг. 2, но в отношении маневра для выбранной нагрузки 824.
Как представлено в этом примере, минимальное число 836 Маха аварийного оповещения при маневрировании используется как обратная связь при идентификации угла 820 атаки аварийного оповещения при маневрировании. Угол 820 атаки аварийного оповещения при маневрировании выводят из сумматора 812. Сумматор 812 выполнен с возможностью суммирования вместе исходного угла 610 атаки аварийного оповещения по фиг. 6, отрицательного смещения 838 компенсации числа Маха при маневрировании, смещения 614 текущей нагрузки на крыло по фиг. 6 и отрицательного смещения 620 угла атаки по фиг. 6 для генерирования угла 820 атаки аварийного оповещения при маневрировании. Смещение 838 компенсации числа Маха при маневрировании генерируют, используя минимальное число 836 Маха аварийного оповещения при маневрировании.
В частности, умножитель 816 выполнен с возможностью умножения смещения 720 наклона по фиг. 7 на минимальное число 836 Маха аварийного оповещения при маневрировании для генерирования произведения 840. Сумматор 814 выполнен с возможностью суммирования смещения 718 точки пересечения по фиг. 7 и произведения 840 для генерирования суммы 842. Модуль 818 выбора верхнего значения выполнен с возможностью выбора верхнего значения суммы 842 и нулевого значения 844 и выводит это верхнее значение как смещение 838 компенсации числа Маха при маневрировании.
Далее, на фиг. 9, представлена иллюстрация логической схемы для идентификации скорости аварийного оповещения в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере логическая схема 900 выполнена с возможностью идентификации в узлах скорости аварийного оповещения для самолета. Логическая схема 900 может быть воплощена в генераторе 224 порогового значения на фиг. 2.
Как представлено, логическая схема 900 включает в себя фильтр 902 и умножитель 904. Фильтр 902 выполнен с возможностью приема воздушной скорости 906, в качестве входных данных. В этом иллюстративном примере воздушная скорость 906 представляет собой истинную скорость полета самолета в узлах. Фильтр 902 может представлять собой, например, фильтр низкой частоты. В частности, фильтр 902 может представлять собой фильтр низкой частоты первого порядка.
Фильтр 902 использует воздушную скорость 906 для генерирования отфильтрованной воздушной скорости 908. Отфильтрованную воздушную скорость 908 подают как входные данные в умножитель 904, вместе с фактором 538 скорости по фиг. 5. Умножитель 904 умножает фактор 538 скорости и отфильтрованную воздушную скорость 908 для генерирования воздушной скорости 910 аварийного оповещения. В некоторых случаях, воздушная скорость 910 аварийного оповещения может использоваться как пороговое значение скорости, такое как, например, пороговое значение 234 скорости на фиг. 2, для генерирования аварийного оповещения.
В других иллюстративных примерах, когда самолет выполняет маневр, отфильтрованную воздушную скорость 908 умножают на фактор 834 скорости маневра по фиг. 8 для генерирования приборной воздушной скорости аварийного оповещения при маневрировании. Приборная воздушная скорость аварийного оповещения при маневрировании также может использоваться как пороговое значение скорости для генерирования аварийного оповещения.
Возвращаясь теперь к фиг. 10, можно видеть иллюстрацию логической схемы для генерирования аварийного оповещения в соответствии с иллюстративным примером.
Логическая схема 1000 представляет собой пример одного из подходов, в соответствии с которым может быть сгенерировано аварийное оповещение. Логическая схема 1000 может быть воплощена в генераторе 226 аварийного оповещения по фиг. 2.
Как представлено, логическая схема 1000 включает в себя сумматор 1002 и модуль 1004 сравнения. Сумматор 1002 принимает отфильтрованный угол 522 атаки по фиг. 5 и угол 532 атаки аварийного оповещения по фиг. 5 как входные данные. Таким образом, генератор 226 аварийного оповещения по фиг. 2 может принимать угол 532 атаки аварийного оповещения как пороговое значение 231 угла атаки по фиг. 2.
Сумматор 1002 суммирует отфильтрованный угол 522 атаки и отрицательный угол 532 атаки аварийного оповещения для генерирования суммы 1006. Модуль 1004 сравнения выполнен с возможностью сравнения суммы 1006 с нулем. Если сумма 1006 больше чем ноль, тогда аварийное оповещение 1008 будет сгенерировано. Аварийное оповещение 1008 представляет собой пример одного варианта осуществления для аварийного оповещения 230 по фиг. 2. Аварийное оповещение 230 может представлять собой, например, без ограничений, команду, которую посылают в вибросигнализатор рукоятки управления самолета, такой как вибросигнализатор 422 рукоятки управления по фиг. 4.
Иллюстрации логической схемы 500 на фиг. 5, логической схемы 600 на фиг. 6, логической схемы 700 на фиг. 7, логической схемы 800 на фиг. 8, логической схемы 900 на фиг. 9 и логической схемы 1000 на фиг. 10 не подразумевают какие-либо физические или архитектурные ограничения в отношении подхода, в соответствии с которым может быть воплощен иллюстративный вариант осуществления. Могут использоваться другие компоненты в дополнение к представленным или вместо представленных. Некоторые компоненты могут быть необязательными.
Кроме того, блоки представлены для иллюстрации некоторых логических компонентов. Один или больше из этих блоков могут быть скомбинированы, разделены или скомбинированы и разделены на разные блоки при воплощении в иллюстративном варианте осуществления. Кроме того, одна или больше из логических схем на фиг. 5-10 могут быть скомбинированы с другими.
Возвращаясь теперь к фиг. 11, можно видеть иллюстрацию таблицы, для идентификации коэффициента подъемной силы, в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере таблица 1100 представляет собой пример одного варианта осуществления для таблицы среди множества таблиц 251 по фиг. 2. В частности, таблица 1100 может представлять собой пример одного варианта осуществления таблицы, который может использоваться модулем 504 поиска в таблице по фиг. 5, модулем 506 поиска в таблице по фиг. 5 и модулем 801 поиска в таблице по фиг. 8.
В этих иллюстративных примерах ряды 1102 соответствуют углу атаки в градусах, в то время как столбцы 1104 соответствуют положениям фиксатора закрылка. Модуль поиска в таблице может использовать входные данные в форме угла атаки и положения фиксатора закрылка для идентификации определенного коэффициента подъемной силы среди коэффициентов 1106 подъемной силы в таблице 1100. В некоторых иллюстративных примерах, когда входные данные в модуле поиска в таблице не включены в значения в рядах 1102 и/или значения в столбцах 1104, модуль поиска в таблице может использовать интерполяцию для идентификации правильного коэффициента подъемной силы.
Иллюстрация в таблице 1100 не предполагает каких-либо ограничений в отношении подхода, в соответствии с которым таблица может быть воплощена для модуля поиска в таблице. В этом иллюстративном примере представлены только четыре ряда и столбца. Однако в других иллюстративных примерах другое количество рядов и столбцов может быть включено в таблицу 1100.
Далее, со ссылкой на фиг. 12, представлена иллюстрация графика коэффициентов подъемной силы в зависимости от числа Маха в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере график 1200 содержит вертикальную ось 1202 и горизонтальную ось 1204. На вертикальной оси 1202 представлены значения коэффициента подъемной силы. На горизонтальной оси 1204 представлены значения числа Маха.
Линия 1206 соответствует коэффициенту подъемной силы сваливания для самолета в зависимости от числа Маха. Как представлено, коэффициент подъемной силы сваливания для самолета изменяется по мере изменения числа Маха для самолета.
Линия 1208 соответствует коэффициенту подъемной силы аварийного оповещения, который может быть сгенерирован некоторыми доступными в настоящее время системами аварийного оповещения для использования при генерировании аварийного оповещения, когда самолет достигает потенциального состояния сваливания. Как представлено, используемый коэффициент подъемной силы аварийного оповещения остается фиксированным во время полета и не изменяется при изменении числа Маха. Когда используется этот тип коэффициента подъемной силы аварийного оповещения, аварийное оповещение может не быть сгенерировано, до момента, пока самолетом не будет достигнут коэффициент подъемной силы сваливания для чисел Маха, больше чем приблизительно 0,38. Другими словами, аварийное оповещение может не быть сгенерировано до момента после перехода самолета в сваливание.
Линия 1210 соответствует коэффициенту подъемной силы аварийного оповещения, который может быть сгенерирован системой 216 управления сваливанием на фиг. 2. В частности, линия 1210 может соответствовать коэффициенту 244 подъемной силы аварийного оповещения. Как представлено, коэффициент 244 подъемной силы аварийного оповещения изменяется при изменении коэффициента подъемной силы сваливания. В частности, коэффициент подъемной силы аварийного оповещения выполнен так, что он постоянно остается приблизительно на десять процентов меньше, чем коэффициент подъемной силы сваливания.
Благодаря использованию коэффициента подъемной силы аварийного оповещения, который выполнен с возможностью изменения с изменением числа Маха для самолета, аварийное оповещение всегда может быть сгенерировано до перехода самолета в сваливание. Таким образом, оператор может иметь достаточно времени для выполнения множества маневров для предотвращения или уменьшения вероятности сваливания самолета.
Возвращаясь теперь к фиг. 13, здесь представлена иллюстрация обработки для управления полетом самолета в форме блок-схемы последовательности операций в соответствии с иллюстративным вариантом осуществления. Процесс, представленный на фиг. 13, может быть воплощен в самолете 202, используя систему 216 управления сваливанием по фиг. 2.
Процесс начинается путем идентификации угла атаки аварийного оповещения для самолета, используя ранее идентифицированную скорость аварийного оповещения для самолета (операция 1300). При выполнении операции 1300 угол атаки аварийного оповещения может быть идентифицирован с использованием исходного угла атаки аварийного оповещения и множества значений смещения. Такие значения смещения могут включать в себя, например, без ограничений, по меньшей мере, одно из смещения угла атаки, смещения компенсации числа Маха, смещения текущей нагрузки на крыло и смещения компенсации воздушного тормоза. В одном иллюстративном примере исходный угол атаки аварийного оповещения идентифицируют, используя положение фиксатора закрылка и таблицу.
Процесс затем идентифицирует коэффициент подъемной силы аварийного оповещения для самолета, используя угол атаки аварийного оповещения (операция 1302). При операции 1302 коэффициент подъемной силы аварийного оповещения может быть идентифицирован, используя положение фиксатора закрылка и таблицу.
После этого процесс идентифицирует скорость аварийного оповещения для самолета, используя коэффициент подъемной силы аварийного оповещения и текущий коэффициент подъемной силы для самолета (операция 1304). Скорость аварийного оповещения может представлять собой, например, число Маха аварийного оповещения. Другими словами, скорость аварийного оповещения представлена как число Маха. Кроме того, скорость аварийного оповещения может использоваться как обратная связь для идентификации следующего угла атаки аварийного оповещения.
Процесс затем идентифицирует набор пороговых значений для использования при генерировании аварийного оповещения, обозначающего потенциальное состояние сваливания для самолета, используя, по меньшей мере, один из угла атаки аварийного оповещения, коэффициента подъемной силы аварийного оповещения и скорости аварийного оповещения (операция 1306). Набор пороговых значений может включать в себя, например, пороговое значение угла атаки, пороговое значение коэффициента подъемной силы и/или пороговое значение скорости. В некоторых случаях пороговое значение угла атаки, пороговое значение коэффициента подъемной силы и пороговое значение скорости могут представлять собой угол атаки аварийного оповещения, коэффициент подъемной силы аварийного оповещения и скорость аварийного оповещения соответственно.
Далее процесс генерирует аварийное оповещение, когда, по меньшей мере, одно из пороговых значений в наборе пороговых значений пересекаются (операция 1308) с последующим прекращением обработки. При выполнении операции 1308 может генерироваться аварийное оповещение, когда, например, по меньшей мере, один из угла атаки самолета больше, чем пороговое значение угла атаки, текущий коэффициент подъемной силы самолета больше, чем коэффициент подъемной силы аварийного оповещения, и скорость самолета ниже порогового значения скорости.
На фиг. 13, используя скорость аварийного оповещения, в качестве обратной связи, при идентификации угла атаки аварийного оповещения можно регулировать коэффициент подъемной силы аварийного оповещения, идентифицируемый, используя угол атаки аварийного оповещения, в соответствии с количеством изменений текущего состояния самолета. Другими словами, угол атаки аварийного оповещения, коэффициент подъемной силы аварийного оповещения и скорость аварийного оповещения могут быть отрегулированы в соответствии с изменениями текущего состояния самолета. Таким образом, аварийное оповещение о том, что самолет достиг потенциального состояния сваливания, может быть сгенерировано до фактического сваливания самолета.
Блок-схемы последовательности операций, логические схемы и блок-схемы в различных представленных вариантах осуществления иллюстрируют архитектуру, функции и операции некоторых возможных вариантов осуществления устройства и способов в иллюстративном варианте осуществления. В этом отношении, каждый блок в блок-схемах последовательности операций, логических схемах или в блок-схемах может представлять собой модуль, сегмент, функцию и/или часть операции или этапа. Например, один или больше из блоков может быть воплощен как программный код в аппаратных средствах или, как комбинация программного кода и аппаратных средств. При воплощении в виде аппаратных средств аппаратное средство может, например, принимать форму интегральной схемы, которая изготовлена или выполнена с возможностью выполнения одной или больше операций в блок-схемах последовательности операций, логических схемах или блок-схемах.
В некоторых альтернативных вариантах осуществления иллюстративного варианта осуществления функция или функции, представленные в блоках, могут возникать в порядке, представленном на чертежах. Например, в некоторых случаях, два блока, представленные последовательно, могут быть выполнены, по существу, одновременно, или блоки иногда могут быть выполнены в обратном порядке, в зависимости от соответствующих функций. Кроме того, другие блоки могут быть добавлены в дополнение к иллюстрируемым блокам в блок-схеме последовательности операций, логической схеме или в блок-схеме.
Возвращаясь к фиг. 14, можно видеть иллюстрацию системы обработки данных в соответствии с иллюстративным вариантом осуществления. В этом иллюстративном примере система 1400 обработки данных может использоваться для воплощения одного или больше компьютеров в вычислительной системе 222 на фиг. 2. В этом иллюстративном примере система 1400 обработки данных включает в себя структуру 1402 передачи данных, которая обеспечивает обмен данными между модулем 1404 процессора, запоминающим устройством 1406, постоянным накопителем 1408, модулем 1410 передачи данных, модулем 1412 ввода/вывода (I/O) и дисплеем 1414.
Модуль 1404 процессора используется для выполнения инструкции для программного обеспечения, которое может быть загружено в запоминающее устройство 1406. Модуль 1404 процессора может представлять собой множество процессоров, многопроцессорное ядро или некоторый другой тип процессора, в зависимости от конкретного варианта осуществления. Кроме того, модуль 1404 процессора может быть воплощен с использованием множества гетерогенных процессорных систем, в которых основной процессор присутствует с вторичными процессорами на одной микросхеме. В качестве другого иллюстративного примера, модуль 1404 процессора может представлять собой симметричную многопроцессорную систему, содержащую множество процессоров одного типа.
Запоминающее устройство 1406 и постоянный накопитель 1408 представляют собой примеры устройств 1416 сохранения. Устройство сохранения представляет собой любую часть аппаратных средств, которые позволяют сохранять информацию, такую как, например, без ограничения, данные, программный код в функциональной форме, и/или другую соответствующую информацию, либо на временной основе и/или постоянной основе. Устройства 1416 сохранения также могут называться считываемыми компьютером устройствами сохранения в этих примерах. Запоминающее устройство 1406, в этих примерах, может представлять собой, например, оперативное запоминающее устройство или любое другое соответствующее энергозависимое или энергонезависимое устройство сохранения. Постоянный накопитель 1408 может принимать различные формы, в зависимости от конкретного воплощения.
Например, без ограничений, постоянный накопитель 1408 может содержать один или больше компонентов или устройств. Например, постоянный накопитель 1408 может представлять собой привод с жестким диском, запоминающее устройство типа флэш, съемный оптический диск, перезаписываемую магнитную ленту или некоторую комбинацию описанных выше. Носители, используемые в постоянном накопителе 1408, также могут быть съемными. Например, съемный привод на жестком диске может использоваться в качестве постоянного накопителя 1408.
Модуль 1410 передачи данных, в этих примерах, обеспечивает обмен данными с другими системами или устройствами обработки данных. В этих примерах модуль 1410 передачи данных представляет собой карту сетевого интерфейса. Модуль 1410 передачи данных может обеспечивать передачу данных путем использования любого одного или обоих физического и беспроводного каналов передачи данных.
Модуль 1412 ввода/вывода обеспечивает возможность ввода и вывода данных с другими устройствами, которые могут быть соединены с системой 1400 обработки данных. Например, модуль 1412 ввода/вывода может обеспечивать соединение для ввода данных пользователем, используя клавиатуру, мышь и/или некоторое другое соответствующее устройство ввода данных. Кроме того, модуль 1412 ввода/вывода может передавать выходные данные в принтер. Дисплей 1414 обеспечивает механизм для отображения информации для пользователя.
Инструкции для операционной системы, приложений и/или программ могут быть размещены в устройствах 1416 накопителях, которые сообщаются с модулем 1404 процессора через структуру 1402 передачи данных. В этих иллюстративных примерах инструкции представлены в функциональной форме постоянного накопителя 1408. Эти инструкции могут быть загружены в запоминающее устройство 1406 для их выполнения модулем 1404 процессора. Процессы в соответствии с разными вариантами осуществления могут выполняться модулем 1404 процессора, используя воплощенные в компьютере инструкции, которые могут быть размещены в запоминающем устройстве, таком как запоминающее устройство 1406.
Эти инструкции называются программным кодом, используемым компьютером программным кодом, или считываемым компьютером программным кодом, который может быть считан и может выполняться процессором в модуле 1404 процессора. Программный код в разных вариантах осуществления может быть воплощен на разных физических или считываемых компьютером носителях информации, таких как запоминающее устройство 1406 или постоянный накопитель 1408.
Программный код 1418 расположен в функциональной форме на считываемом в компьютере носителе 1420 информации, который выполнен с возможностью избирательного удаления и его загрузки в или переноса в систему 1400 обработки данных, для выполнения модулем 1404 процессора. Программный код 1418 и считываемый в компьютере носитель 1420 информации формируют компьютерный программный продукт 1422 в этих примерах. В одном примере считываемые компьютером носители 1420 могут представлять собой считываемые компьютером носители 1424 информации или считываемые компьютером среды 1426 передачи сигналов.
Считываемые компьютером 1424 носители информации могут включать в себя, например, без ограничения, оптический или магнитный диск, которые могут быть вставлены или размещены в приводе или в другом устройстве, которое представляет собой часть постоянного накопителя 1408 для переноса в устройство сохранения, такое как привод на жестком диске, который представляет собой часть постоянного накопителя 1408. Считываемые компьютером носители 1424 информации также могут быть выполнены в форме постоянного накопителя, таком как привод на жестком диске, миниатюрное запоминающее устройство или запоминающее устройство типа флэш, которое соединено с системой 1400 обработки данных. В некоторых случаях, считываемые компьютером носители 1424 информации могут не быть съемными из системы 1400 обработки данных.
В этих примерах считываемые компьютером носители 1424 информации представляют собой физическое или материальное устройство-накопитель, используемое для сохранения программного кода 1418, а не среду, по которой распространяется или по которой передают программный код 1418. Считываемые компьютером носители 1424 информации также называются считываемыми компьютером материальными устройствами накопителями или считываемыми компьютером физическими устройствами накопителями. Другими словами, считываемые компьютером носители 1424 информации представляют собой носители, к которым может прикоснуться человек.
В качестве альтернативы, программный код 1418 может быть передан в систему 1400 обработки данных, используя считываемую компьютером среду 1426 передачи сигналов. Считываемая компьютером среда 1426 передачи сигналов может представлять собой, например, без ограничений, распространяющийся сигнал данных, который содержит программный код 1418. Например, считываемая компьютером среда 1426 передачи сигналов может представлять собой электромагнитный сигнал, оптический сигнал и/или любой другой соответствующий тип сигнала. Эти сигналы могут быть переданы по линиям передачи данных, таким как беспроводные линии передачи данных, оптоволоконный кабель, коаксиальный кабель, провод и/или любой другой соответствующий тип соединения для передачи данных. Другими словами, каналы передачи данных и/или соединения могут быть физическими или беспроводными в иллюстративных примерах.
В некоторых иллюстративных вариантах осуществления программный код 1418 может быть загружен через сеть в постоянный накопитель 1408 из другого устройства или системы обработки данных через считываемую компьютером среду 1426 передачи сигналов для использования в системе 1400 обработки данных. Например, программный код, содержащийся на считываемом в компьютере носителе информации, в системе обработки данных - сервере, может быть загружен через сеть из сервера в систему 1400 обработки данных. Система обработки данных, предоставляющая программный код 1418, может представлять собой компьютер - сервер, компьютер - клиент или некоторое другое устройство, выполненное с возможностью сохранения и передачи программного кода 1418.
При этом подразумевается, что разные компоненты, представленные для системы 1400 обработки данных, не составляют архитектурные ограничения в отношении подхода, в котором могут быть воплощены разные варианты осуществления. Разные иллюстративные варианты осуществления могут быть воплощены в системе обработки данных, включающей в себя компоненты, в дополнение к или вместо представленных для системы 1400 обработки данных. Другие компоненты, показанные на фиг. 14, могут отличаться от представленных иллюстративных примеров. Разные варианты осуществления могут быть воплощены с использованием любого аппаратного устройства или системы, выполненных с возможностью выполнения программного кода. В качестве одного примера система обработки данных может включать в себя органические компоненты, интегрированные с неорганическими компонентами, и/или может состоять исключительно из органических компонентов, исключая человека. Например, устройство-накопитель может состоять из органического полупроводника.
В другом иллюстративном примере модуль 1404 обработки может быть выполнен в форме аппаратного модуля, который имеет схемы, изготовленные или сконфигурированные для конкретного использования. Этот тип аппаратных средств может выполнять операции без необходимости загрузки программного кода в запоминающее устройство из устройства- накопителя, которое должно быть сконфигурировано для выполнения этих операций.
Например, когда модуль 1404 процессора принимает форму аппаратного модуля, модуль 1404 процессора может представлять собой систему цепей, специализированную интегральную схему (ASIC), программируемое логическое устройство или некоторый другой соответствующий тип аппаратных средств, сконфигурированных для выполнения множества операций. При использовании программируемого логического устройства такое устройство сконфигурировано для выполнения множества операций. Устройство может быть реконфигурировано в более позднее время или может быть постоянно сконфигурировано для выполнения множества операций. Примеры программируемых логических устройств включают в себя, например, без ограничений, программируемую логическую матрицу, программируемую пользователем логическую матрицу, программируемую пользователем вентильную матрицу и другие соответствующие устройства. При таком типе воплощения программный код 1418 может быть исключен, поскольку процессы для выполнения разных вариантов осуществления воплощены в аппаратном модуле.
В еще одном, другом иллюстративном примере модуль 1404 процессора может быть воплощен с использованием комбинации процессоров, которые можно найти в компьютерах и в аппаратных модулях. Модуль 1404 процессора может иметь множество аппаратных модулей и множество процессоров, которые сконфигурированы для выполнения программного кода 1418. В таком представленном примере некоторые из процессов могут быть воплощены в ряде аппаратных модулей, в то время как другие процессы могут быть воплощены в ряде процессоров.
В другом примере система шины может использоваться для воплощения структуры 1402 передачи данных и может состоять из одной или больше шин, таких как системная шина или шина ввода/вывода. Конечно, система шины может быть воплощена с использованием любого соответствующего типа архитектуры, которая обеспечивает передачу данных между другими компонентами или устройствами, соединенными с этой системой шины.
Кроме того, модуль передачи данных может включать в себя множество устройств, которые передают данные, принимают данные или передают и принимают данные. Модуль передачи может представлять собой, например, модем или сетевой адаптер, два сетевых адаптера или некоторую их комбинацию. Кроме того, запоминающее устройство может, например, без ограничений, представлять собой запоминающее устройство 1406 или кэш, такой, как можно найти в концентраторе интерфейса и контроллера запоминающего устройства, который может присутствовать в структуре 1402 передачи данных.
Таким образом, один или больше иллюстративных вариантов осуществления могут обеспечить более точную идентификацию скоростей, при которых может работать самолет. Разные иллюстративные варианты осуществления учитывают изменения в подъемной силе самолета во время разных фаз полета. В частности, иллюстративные варианты осуществления распознают и учитывают, что подъемная сила самолета может изменяться в различных условиях изменения самолета. Учитывая такие разные условия, самолет может быть выполнен с возможностью работы в аэропортах с более короткими взлетно-посадочными полосами по сравнению с текущими используемыми системами.
Описание разных иллюстративных вариантов осуществления было представлено с целью иллюстрации и описания и не предназначено для описания исчерпывающих или ограничительных вариантов осуществления в раскрытой форме. Множество модификаций и вариантов будут понятны для специалиста в данной области техники. Кроме того, разные иллюстративные варианты осуществления могут обеспечить разные преимущества по сравнению с другими иллюстративными вариантами осуществления. Выбранный вариант или варианты осуществления были выбраны и описаны для наилучшего пояснения принципов вариантов осуществления, практического применения и для обеспечения для других специалистов в данной области техники возможности понимания раскрытия различных вариантов осуществления с различными модификациями, которые предназначены для конкретного рассмотренного применения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ и устройство для защиты максимальной подъемной силы воздушного судна | 2016 |
|
RU2731194C2 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2017 |
|
RU2653417C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2587324C2 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2013 |
|
RU2541902C2 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВАНИИ МОДЕЛИ ЛОБОВОГО СОПРОТИВЛЕНИЯ | 2018 |
|
RU2756243C2 |
| СПОСОБ И УСТРОЙСТВО ПИЛОТИРОВАНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА, ОПТИМИЗИРУЮЩИЕ УПРАВЛЕНИЕ ЭЛЕРОНАМИ В КОНФИГУРАЦИИ С УВЕЛИЧЕННОЙ ПОДЪЕМНОЙ СИЛОЙ | 2007 |
|
RU2389645C1 |
| СИСТЕМА И СПОСОБ ОЦЕНКИ ВОЗДУШНОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ОСНОВАНИИ МОДЕЛИ НАКОПЛЕНИЯ ДАННЫХ О ПОГОДЕ. | 2018 |
|
RU2755843C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ САМОЛЕТ КОРАБЕЛЬНОГО БАЗИРОВАНИЯ, СПОСОБ ЕГО УПРАВЛЕНИЯ И СИСТЕМА ИНДИКАЦИИ ПО УГЛУ АТАКИ САМОЛЕТА | 2010 |
|
RU2442724C1 |
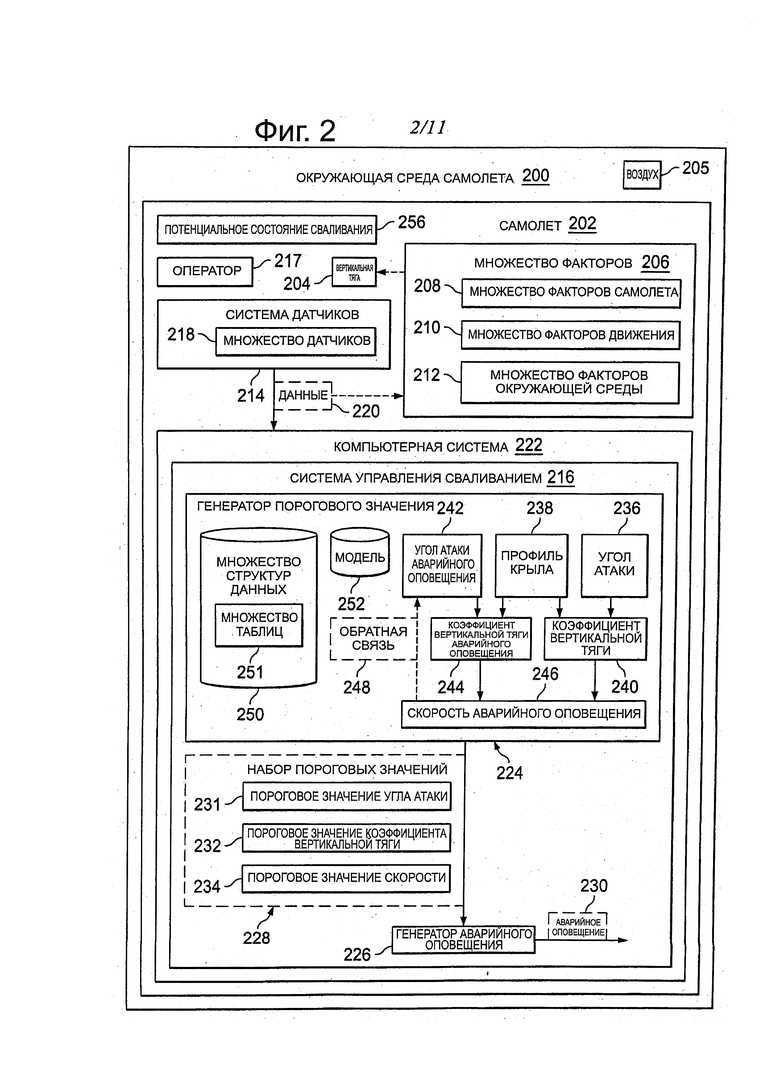
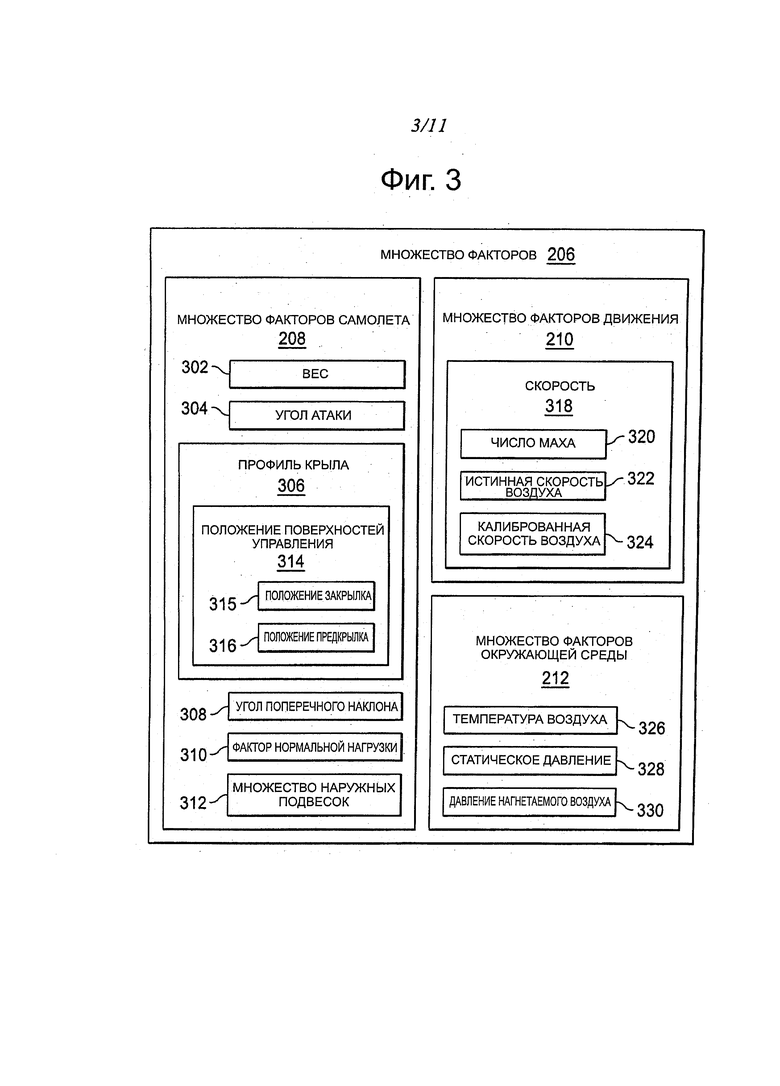
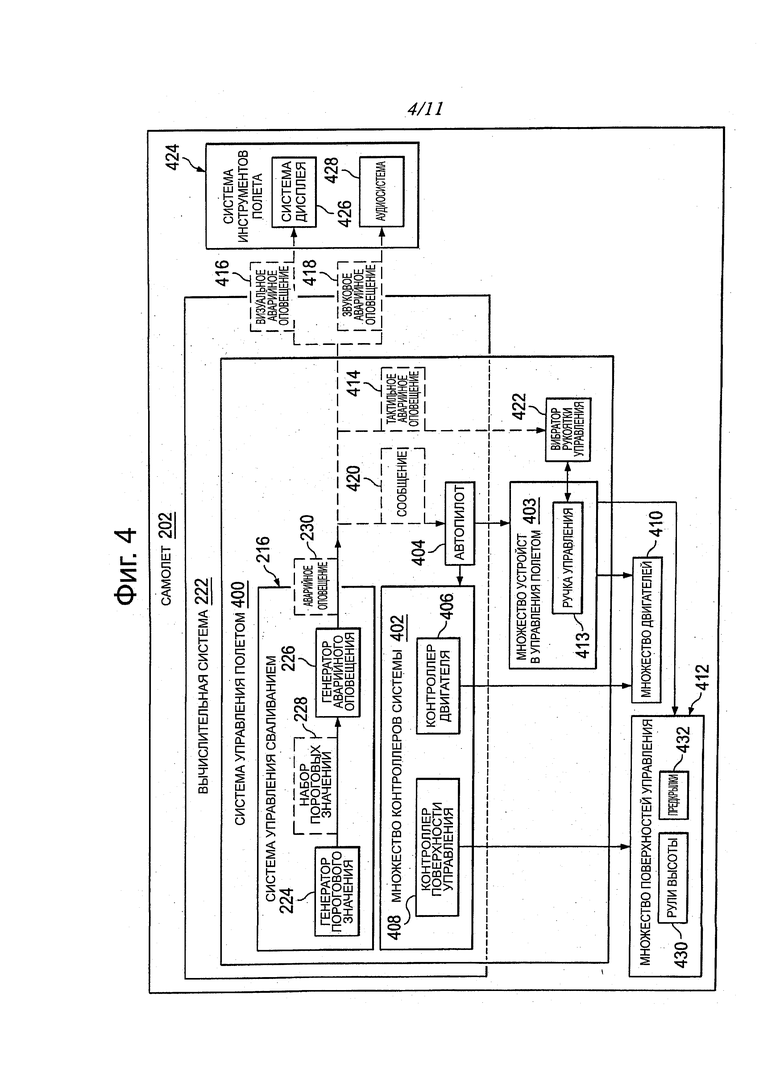
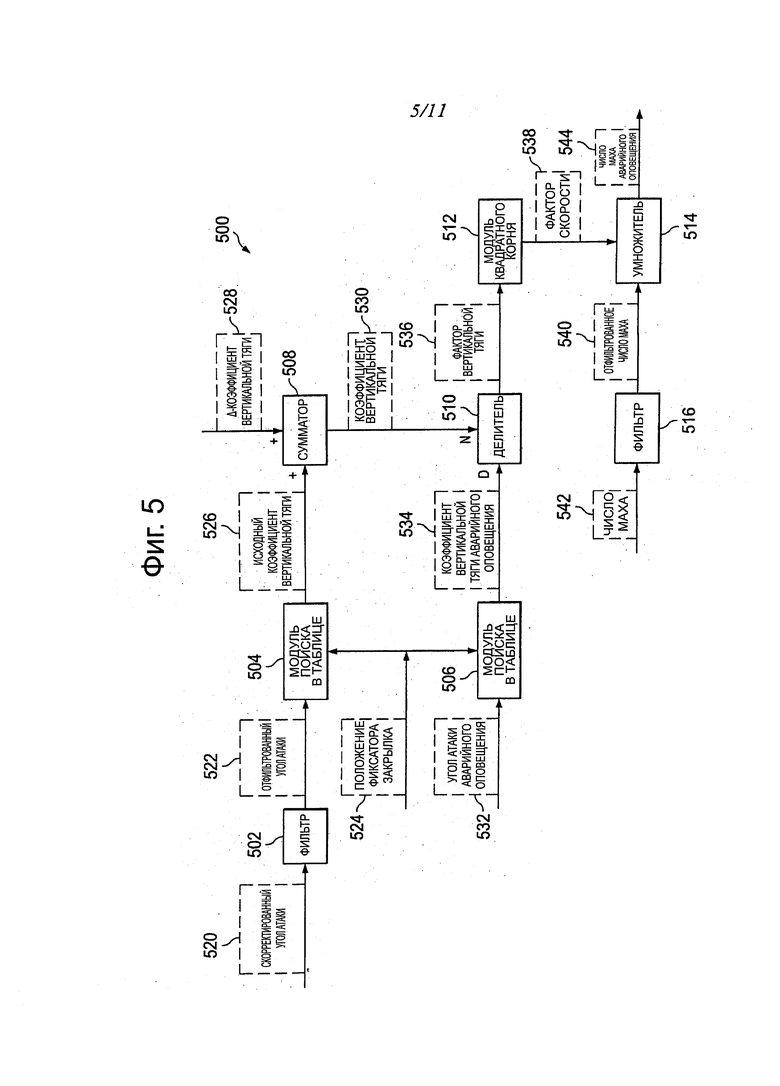
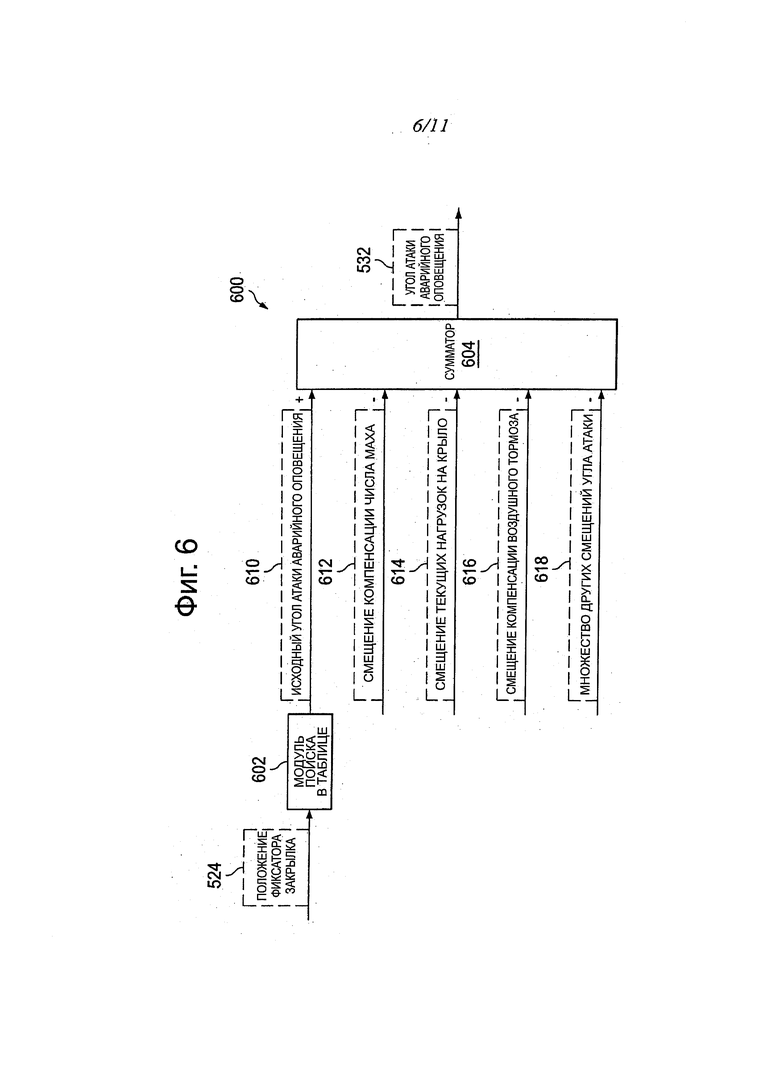
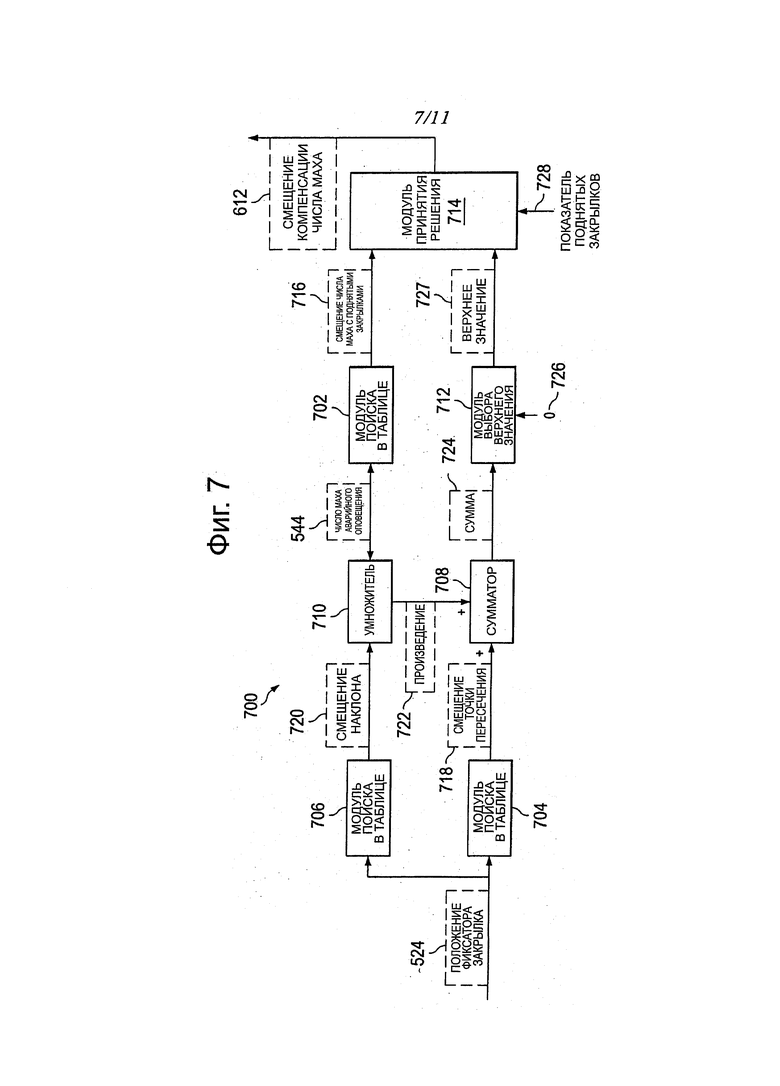
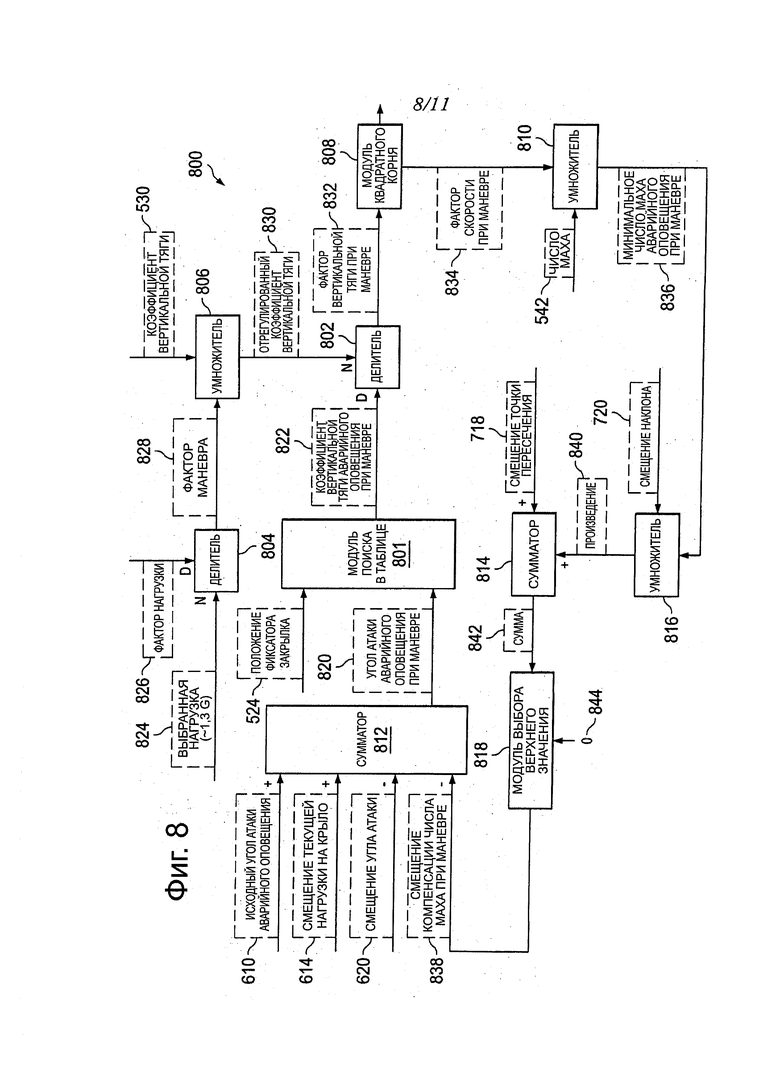
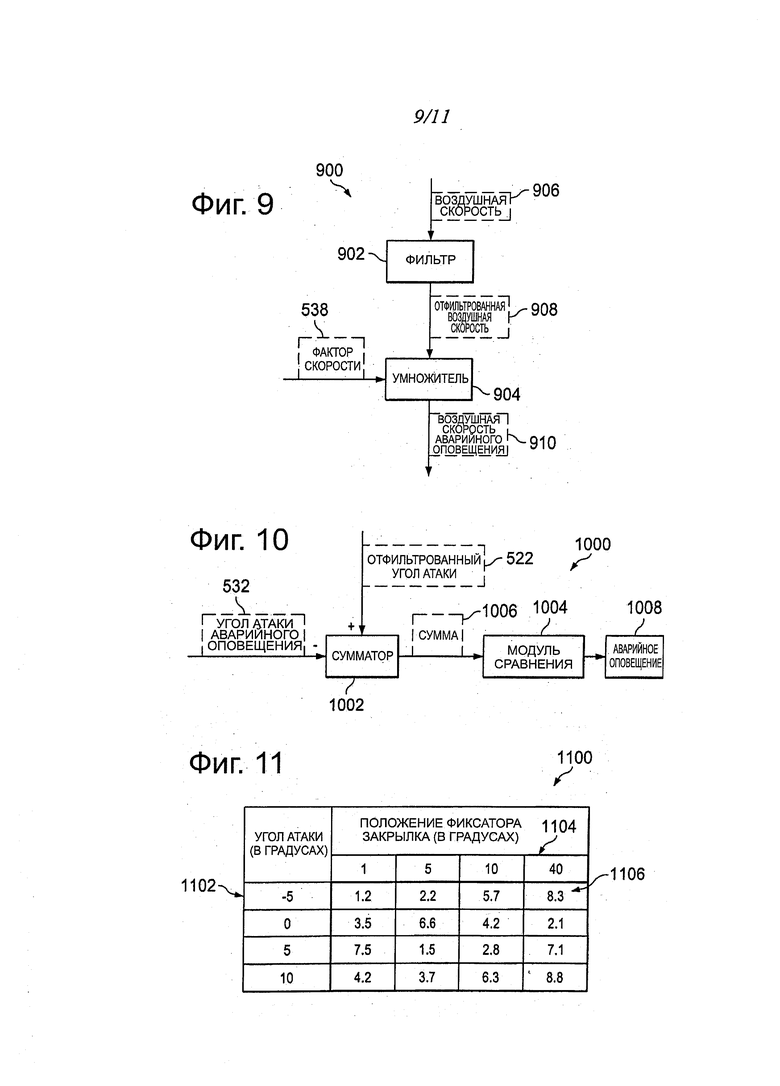
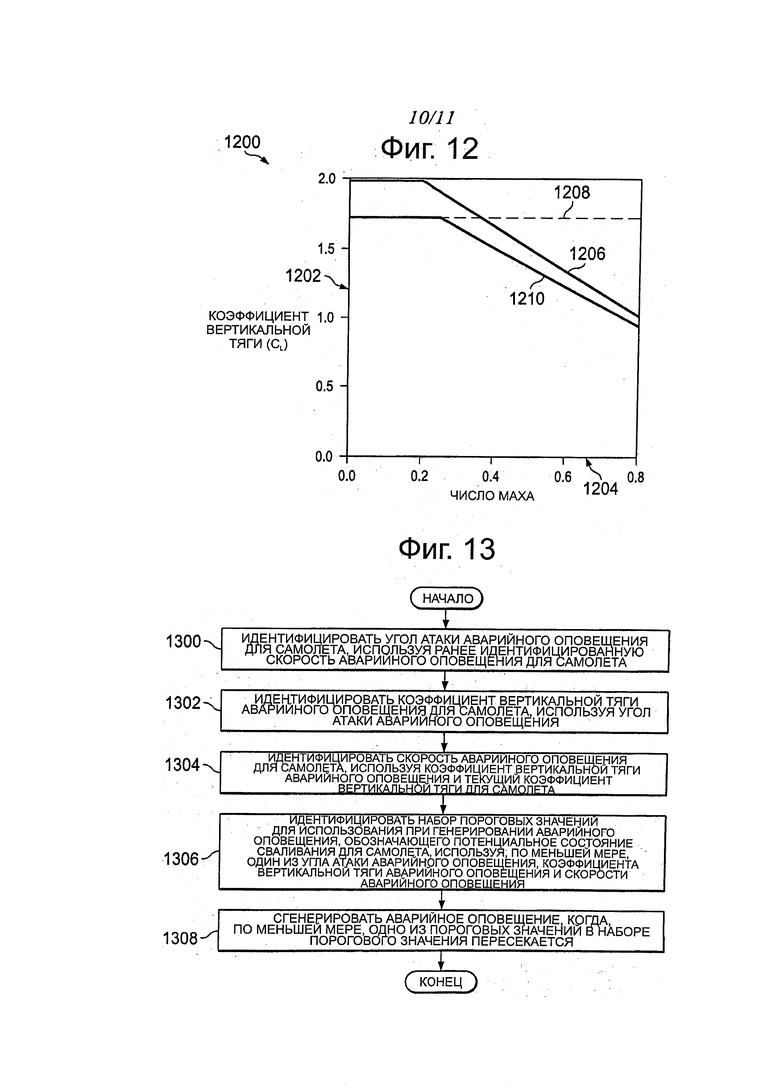
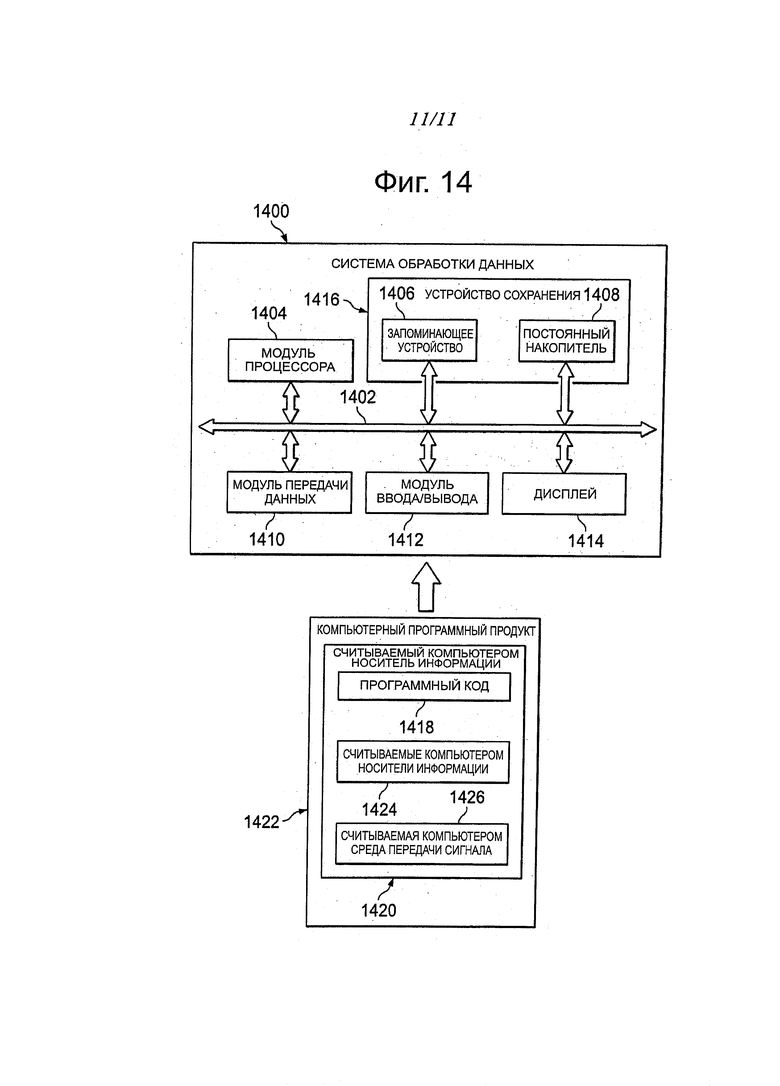
Группа изобретений относится к способу управления самолетом, способу для обозначения потенциального состояния сваливания, системе управления сваливанием. Для управления самолетом идентифицируют угол атаки, коэффициент подъемной силы, воздушную скорость аварийного оповещения для самолета определенным образом. Для обозначения потенциального состояния сваливания для самолета во время полета идентифицируют коэффициент подъемной силы аварийного оповещения и регулируют его в ответ на количество изменений в текущем состоянии самолета, идентифицируют набор пороговых значений для генерирования аварийного оповещения для оператора самолета. Система управления сваливанием содержит генератор пороговых значений, выполненный с возможностью идентификаций критических значений для аварийного оповещения. Обеспечивается аварийное оповещение при критических режимах полета. 3 н. и 17 з.п. ф-лы, 14 ил. 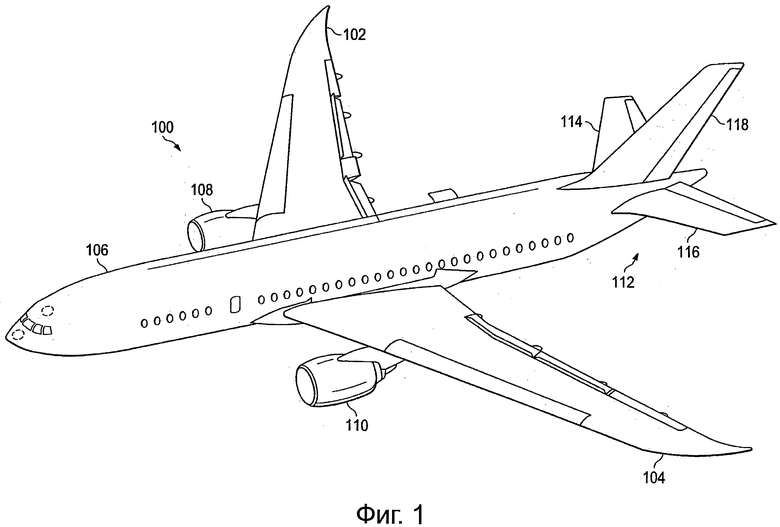
1. Способ управления самолетом во время полета, включающий следующие этапы:
идентифицируют угол (242) атаки аварийного оповещения для самолета (202) с использованием ранее идентифицированной воздушной скорости (248) аварийного оповещения для самолета (202);
идентифицируют коэффициент (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202); и
идентифицируют воздушную скорость (246) аварийного оповещения для самолета (202) с использованием коэффициента (244) подъемной силы аварийного оповещения для самолета (202) и текущего коэффициента (240) подъемной силы для самолета (202).
2. Способ по п. 1, дополнительно включающий этап, на котором:
идентифицируют набор пороговых значений (228) для использования при генерировании аварийного оповещения (230) для оператора самолета, обозначающего потенциальное состояние (256) сваливания для самолета (202), с использованием, по меньшей мере, одного из следующего: угла (242) атаки аварийного оповещения, коэффициента (244) подъемной силы аварийного оповещения и воздушной скорости (246) аварийного оповещения.
3. Способ по п. 2, в котором этап идентификации набора пороговых значений (228) для использования при генерировании аварийного оповещения (230), обозначающего потенциальное состояние (256) сваливания для самолета (202), включает в себя:
идентификацию по меньшей мере одного из следующего: порогового значения (231) угла атаки с использованием угла (242) атаки аварийного оповещения, порогового значения (232) коэффициента подъемной силы с использованием коэффициента (242) подъемной силы аварийного оповещения и порогового значения (234) воздушной скорости с использованием воздушной скорости (246) аварийного оповещения.
4. Способ по п. 3, дополнительно включающий этап, на котором:
генерируют аварийное оповещение (230), когда имеет место, по меньшей мере, одно из следующего: угол (236) атаки самолета (202) больше, чем пороговое значение (231) угла атаки, текущий коэффициент (240) подъемной силы самолета (202) больше, чем пороговое значение (232) коэффициента подъемной силы, воздушная скорость самолета ниже, чем пороговое значение (234) воздушной скорости; и
передают сигнал аварийного оповещения (230) в вибросигнализатор (422) рукоятки управления в самолете (202).
5. Способ по п. 1, в котором этап идентификации угла (242) атаки аварийного оповещения для самолета (202) с использованием ранее идентифицированной воздушной скорости (248) аварийного оповещения для самолета (202) включает следующие действия:
идентифицируют исходный угол (610) атаки аварийного оповещения, с использованием положения фиксатора закрылка (524) и таблицы (602);
идентифицируют смещение компенсации числа (612) Маха с использованием ранее идентифицированной воздушной скорости (246) аварийного оповещения самолета (202); и
идентифицируют угол (242) атаки аварийного оповещения для самолета (202) с использованием исходного угла (610) атаки аварийного оповещения и смещения (612) компенсации числа Маха.
6. Способ по п. 5, в котором этап идентификации угла (242) атаки аварийного оповещения для самолета (202) с использованием исходного угла (610) атаки аварийного оповещения и смещения (612) компенсации числа Маха включает следующие действия:
идентифицируют угол (242) атаки аварийного оповещения самолета (202) с использованием исходного угла (610) атаки аварийного оповещения, смещения (612) компенсации числа Маха и, по меньшей мере, одного из следующего: текущего смещения (614) нагрузки на крыло, смещения компенсации воздушного тормоза (616) и смещения угла (618) атаки.
7. Способ по п. 1, в котором этап идентификации коэффициента (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202) включает следующие действия:
идентифицируют коэффициент (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202), положения (524) фиксатора закрылка и таблицы (506).
8. Способ по п. 1, в котором этап идентификации воздушной скорости (246) аварийного оповещения для самолета (202) с использованием коэффициента (244) подъемной силы аварийного оповещения для самолета (202) и текущего коэффициента (240) подъемной силы для самолета (202) включает следующие действия:
идентифицируют текущий коэффициент (240) подъемной силы для самолета (202) с использованием скорректированного угла (520) атаки, положения (524) фиксатора закрылка и таблицы (504);
делят текущий коэффициент (240) подъемной силы на коэффициент (244) подъемной силы аварийного оповещения для генерирования фактора (536) подъемной силы;
идентифицируют квадратный корень (512) фактора (536) подъемной силы для генерирования фактора (538) воздушной скорости; и
идентифицируют воздушную скорость (246) аварийного оповещения с использованием фактора (538) воздушной скорости и текущей воздушной скорости для самолета (202), причем воздушная скорость (246) аварийного оповещения представляет собой число (544) Маха аварийного оповещения для самолета (202), а текущая воздушная скорость представляет собой текущее число Маха для самолета (202).
9. Способ по п. 1, в котором этап идентификации коэффициента (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202) включает следующие действия:
идентифицируют коэффициент (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202), при котором коэффициент (244) подъемной силы аварийного оповещения, по существу, на выбранный процент ниже, чем текущий коэффициент подъемной силы сваливания для самолета.
10. Способ по п. 1, в котором этапы идентификации угла (242) атаки аварийного оповещения для самолета (202) с использованием ранее идентифицированной воздушной скорости (246) аварийного оповещения для самолета (202); идентификации коэффициента (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202); и идентификации воздушной скорости (246) аварийного оповещения для самолета (202) с использованием коэффициента (244) подъемной силы аварийного оповещения для самолета (202) и текущего коэффициента (240) подъемной силы для самолета (202), выполняют для маневра самолета (202).
11. Способ для обозначения потенциального состояния (256) сваливания для самолета во время полета, включающий следующие этапы:
идентифицируют коэффициент (244) подъемной силы аварийного оповещения для самолета (202);
регулируют коэффициент (244) подъемной силы аварийного оповещения в ответ на количество изменений в текущем состоянии самолета (202); и
идентифицируют набор пороговых значений (228) для использования при генерировании аварийного оповещения (230) для оператора самолета, обозначающего, что самолет (202) достиг потенциального состояния (256) сваливания с использованием коэффициента (244) подъемной силы аварийного оповещения.
12. Способ по п. 11, дополнительно включающий этап, на котором:
генерируют аварийное оповещение (230), причем аварийное оповещение (230) содержит, по меньшей мере, одно из тактильного аварийного оповещения (414), визуального аварийного оповещения (416), звукового аварийного оповещения (418) и сообщения (420).
13. Система управления сваливанием, содержащая:
генератор (224) пороговых значений, выполненный с возможностью идентификации угла (242) атаки аварийного оповещения для самолета (202) с использованием ранее идентифицированной воздушной скорости (248) аварийного оповещения для самолета (202); идентификации коэффициента (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202); и идентификации воздушной скорости (246) аварийного оповещения для самолета (202) с использованием коэффициента (244) подъемной силы аварийного оповещения для самолета (202) и текущего коэффициента (240) подъемной силы для самолета (202).
14. Система управления сваливанием по п. 13, в которой генератор (224) порогового значения выполнен с возможностью идентификации набора (228) пороговых значений для использования при генерировании аварийного оповещения (230) для оператора самолета, обозначающего потенциальное состояние (256) сваливания для самолета (202), с использованием, по меньшей мере, одного из следующего: угла (242) атаки аварийного оповещения, коэффициента (244) подъемной силы аварийного оповещения и воздушной скорости (246) аварийного оповещения.
15. Система управления сваливанием по п. 14, в которой генератор (224) порогового значения выполнен с возможностью идентификации набора пороговых значений (228) для использования при генерировании аварийного оповещения (230), обозначающего потенциальное состояние (256) сваливания для самолета (202), путем идентификации, по меньшей мере, одного из следующего: порогового значения (231) угла атаки с использованием угла (242) атаки аварийного оповещения, порогового значения (232) коэффициента подъемной силы с использованием коэффициента (244) подъемной силы аварийного оповещения и порогового значения воздушной скорости (234) с использованием воздушной скорости (246) аварийного оповещения.
16. Система управления сваливанием по п. 15, дополнительно содержащая:
генератор (226) аварийного оповещения, выполненный с возможностью приема набора пороговых значений (228) из генератора (224) пороговых значений и генерирования аварийного оповещения (230), когда имеет место, по меньшей мере, одно из следующего: угол (236) атаки самолета (202) больше, чем пороговое значение (231) угла атаки, текущий коэффициент (240) подъемной силы самолета (202) больше, чем пороговое значение (232) коэффициента подъемной силы, воздушная скорость самолета (202) ниже, чем пороговое значение (234) воздушной скорости, и подачи аварийного оповещения (230) в вибросигнализатор (422) рукоятки управления в самолете (202).
17. Система управления сваливанием по п. 13, в которой генератор (224) порогового значения выполнен с возможностью идентификации угла (242) атаки аварийного оповещения путем идентификации исходного угла (610) атаки аварийного оповещения, с использованием положения (524) фиксатора закрылка и таблицы (602) среди множества таблиц (251); идентификации смещения (612) компенсации числа Маха с использованием ранее идентифицированной воздушной скорости (248) аварийного оповещения для самолета (202); и
идентификации угла (532) атаки аварийного оповещения для самолета (202) с использованием исходного угла (610) атаки аварийного оповещения и смещения (612) компенсации числа Маха.
18. Система управления сваливанием по п. 17, в которой генератор (224) порогового значения выполнен с возможностью идентификации угла (532) атаки аварийного оповещения для самолета (202), путем идентификации угла (532) атаки аварийного оповещения для самолета (202), с использованием исходного угла (610) атаки аварийного оповещения, смещения (612) компенсации числа Маха и, по меньшей мере, одного из следующего: текущего смещения (614) нагрузки на крыло, смещения (616) компенсации воздушного тормоза и смещения (618) угла атаки.
19. Система управления сваливанием по п. 13, в которой генератор (224) порогового значения выполнен с возможностью идентификации коэффициента (534) подъемной силы аварийного оповещения для самолета (202) с использованием угла (532) атаки аварийного оповещения для самолета (202), положения (524) фиксатора закрылка и таблицы (506).
20. Система управления сваливанием по п. 13, в которой генератор (224) порогового значения дополнительно выполнен с возможностью выполнения этапов идентификации угла (242) атаки аварийного оповещения для самолета с использованием ранее идентифицированной воздушной скорости (248) аварийного оповещения для самолета (202); идентификации коэффициента (244) подъемной силы аварийного оповещения для самолета (202) с использованием угла (242) атаки аварийного оповещения для самолета (202); и идентификации воздушной скорости (246) аварийного оповещения для самолета (202) с использованием коэффициента (244) подъемной силы аварийного оповещения для самолета (202) и текущего коэффициента (240) подъемной силы для самолета (202), для выполнения маневра самолетом (202).
| ШТАМП ДЛЯ ХОЛОДНОЙ ШТАМПОВКИ (ВЫДАВЛИВАНИЯ) СЛОЖНЫХ РЕЛЬЕФОВ В МЕТАЛЛЕ | 1948 |
|
SU79193A1 |
| СПОСОБ И УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ КРИТИЧЕСКИХ РЕЖИМОВ РАБОТЫ СИСТЕМЫ ОПЕРАТОР - ОБЪЕКТ | 1996 |
|
RU2114456C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| US 4235104 A, 15.11.1980 | |||
| US 4908619 A, 13.03.1990 | |||
| US 4910513 A, 20.03.1990. | |||

