Настоящее изобретение относится к способу и устройству пилотирования летательного аппарата, позволяющим оптимизировать управление элеронами в конфигурации с увеличенной подъемной силой.
Известно, что наряду с другими подвижными аэродинамическими поверхностями два симметричных крыла летательного аппарата могут содержать предкрылки и/или закрылки, способные при их выдвижении создавать увеличенную подъемную силу упомянутых крыльев, а также элероны, способные осуществлять поперечное управление упомянутым летательным аппаратом. В такой конфигурации с увеличенной подъемной силой элероны обычно отклоняются вниз для принятия нейтрального сбалансированного положения, участвуя в общем увеличении подъемной силы летательного аппарата.
Однако в таком нейтральном сбалансированном положении эффективность упомянутых элеронов в поперечном управлении относительно низка, поэтому характеристики поперечного управления летательным аппаратом существенно снижены. Кроме того, в результате такой низкой эффективности поперечного управления летательный аппарат имеет низкий запас в отношении явления колебаний, наведенных пилотом.
Задачей настоящего изобретения является устранение этих недостатков.
Для этой цели, согласно изобретению, представлен способ пилотирования летательного аппарата, содержащего два симметричных крыла, оснащенных:
- подвижными аэродинамическими поверхностями, увеличивающими подъемную силу, способными придавать упомянутым крыльям либо гладкую конфигурацию, либо конфигурацию с применением, по меньшей мере, одной увеличивающей подъемную силу поверхности; и
- элеронами для поперечного управления, нейтральное положение которых соответствует нулевому отклонению, при котором упомянутые крылья имеют гладкую конфигурацию;
отличающийся тем, что в конфигурации крыльев с применением увеличивающих подъемную силу поверхностей упомянутым элеронам придается одинаковое положение на двух крыльях, и, без учета возможной команды поперечного управления:
- когда угол атаки и скорость летательного аппарата соответственно меньше пороговой величины угла атаки и больше пороговой величины скорости, первое состояние соответствует положению отклонения вверх на угол, к примеру, по большей мере равный 5°, при котором упомянутые элероны почти полностью сохраняют свою эффективность в поперечном управлении; и
- когда угол атаки летательного аппарата равен или больше упомянутой пороговой величины угла атаки или когда скорость летательного аппарата равна или меньше упомянутой пороговой величины скорости, второе состояние соответствует:
• либо первому отклонению вниз на значение, соответствующее, по меньшей мере, приблизительно максимальным аэродинамическим характеристикам летательного аппарата, если летательный аппарат находится на этапе взлета или повторного взлета,
• либо второму отклонению вниз на значение, соответствующее, по меньшей мере, приблизительно оптимальной подъемной силе летательного аппарата, если летательный аппарат находится на этапе посадки.
Таким образом, в силу настоящего изобретения, когда летательный аппарат имеет конфигурацию с увеличенной подъемной силой, упомянутым элеронам вместо одного положения отклонения сообщается три:
- когда летательный аппарат заходит на посадку или завершает этап взлета, отклонение элеронов вверх достаточно мало, чтобы упомянутые элероны могли демонстрировать превосходную эффективность в поперечном управлении. Кроме того, в таком положении элероны не только создают несущественные помехи, но также подавляют вихри в спутной струе путем образования местного вихря, который в совокупности с другими вихрями, образовываемыми летательным аппаратом, способствует постепенному рассеиванию упомянутых вихрей в спутной струе;
- когда самолет совершает посадку, отклонение элеронов соответствует максимальной подъемной силе, то есть самой низкой скорости сваливания и, следовательно, самой низкой посадочной скорости, что создает оптимальные условия посадки. Кроме того, на этапе посадки отклонение элеронов создает максимальное лобовое сопротивление, таким образом, способствуя уменьшению скорости летательного аппарата; и
- когда летательный аппарат начинает взлет, отклонение элеронов придает летательному аппарату хорошую подъемную силу и не очень большое лобовое сопротивление (аэродинамические характеристики соответствуют отношению подъемной силы к лобовому сопротивлению), содействуя, таким образом, взлету летательного аппарата.
Предпочтительно, для более динамичного переключения из одного состояния в другое, с одной стороны, определить положение при угле атаки α относительно упомянутой пороговой величины угла атаки αs путем сравнения выражения α+К1·q с упомянутой пороговой величиной αs, где К1 - коэффициент положительной постоянной, и q - угловая скорость по тангажу упомянутого летательного аппарата (то есть производная по времени от упомянутого угла атаки α), и, с другой стороны, определить положение при скорости Vс летательного аппарата относительно упомянутой пороговой величины Vs скорости путем сравнения выражения Vc+K2·dVc/dt с упомянутой пороговой величиной Vs, где К2 - коэффициент положительной постоянной, а dVc/dt - ускорение упомянутого летательного аппарата.
Упомянутые пороговые величины угла атаки и скорости зависят от положения увеличивающих подъемную силу аэродинамических поверхностей и от числа Маха.
Переключение элеронов из одного состояния в другое может быть обратимым или необратимым. К примеру, после переключения из упомянутого первого состояния во второе, упомянутые элероны остаются в упомянутом втором состоянии, даже если условия угла атаки и скорости снова будут соответствовать упомянутому первому состоянию. С другой стороны, после переключения из упомянутого первого состояния во второе упомянутые элероны могут переключиться обратно, предпочтительно с запаздыванием, в упомянутое первое состояние, когда условия угла атаки и скорости снова будут соответствовать упомянутому первому состоянию.
Для реализации способа в соответствии с настоящим изобретением возможно использование устройства, находящегося на борту упомянутого летательного аппарата и содержащего:
- первое средство сравнения для сравнения упомянутого угла α атаки с упомянутой пороговой величиной αs угла атаки;
- второе средство сравнения для сравнения упомянутой скорости Vc с упомянутой пороговой величиной Vs скорости;
- логическое средство, выполняющее операцию ИЛИ, которое принимает результаты сравнений, выполненных упомянутыми первым и вторым средствами сравнения;
- первое средство переключения для выбора между упомянутым первым отклонением и упомянутым вторым отклонением; и
- второе средство переключения, включаемое упомянутым логическим средством и предназначенное для выбора между результатом выбора упомянутого первого средства переключения и упомянутым положением отклонения вверх на угол, при котором упомянутые элероны почти полностью сохраняли бы свою эффективность в поперечном управлении.
Фигуры на прилагаемых чертежах истолковывают способ, которым может быть осуществлено изобретение. На данных чертежах одинаковые элементы обозначены одним и тем же порядковым номером.
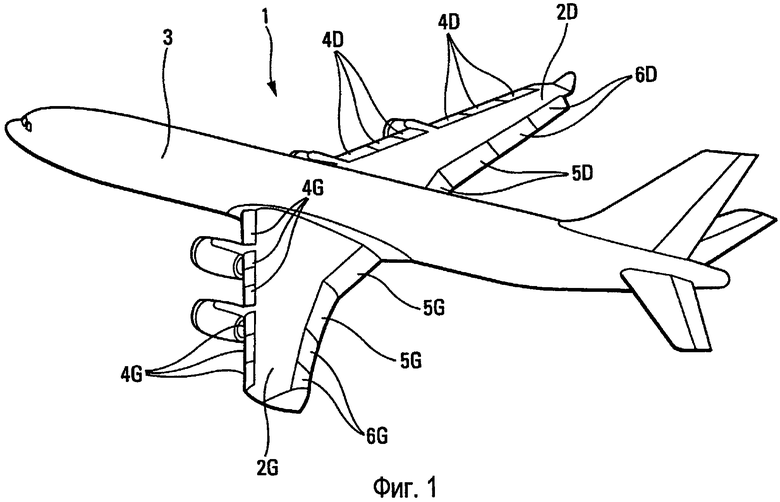
На фиг.1 в схематичной перспективе изображен широкофюзеляжный гражданский самолет, оснащенный предкрылками и увеличивающими подъемную силу закрылками, а также элеронами.
На фиг.2, 3 и 4 представлены графики, иллюстрирующие соответственно эффективность поперечного управления, аэродинамические характеристики и подъемную силу самолета, изображенного на фиг.1, в качестве функции от угла отклонения элеронов.
Фиг.5 является схематичным представлением устройства для осуществления способа в соответствии с настоящим изобретением.
Гражданский транспортный самолет 1, представленный в схематичной перспективе на фиг.1, содержит два крыла 2G и 2D, во всех отношениях симметричных друг другу по отношению к фюзеляжу 3.
Крылья 2G и 2D соответственно содержат предкрылки 4G, 4D, закрылки 5G, 5D (упомянутые предкрылки и закрылки являются аэродинамическими поверхностями, увеличивающими подъемную силу самолета 1), а также элероны 6G, 6D для поперечного управления.
Обычно предкрылки и закрылки 4G, 4D, 5G, 5D выполнены выдвижными и убирающимися для придания крыльям 2G, 2D, а следовательно, и самому самолету 1 гладкой конфигурации при их уборке и конфигурации с применением, по крайней мере, одной увеличивающей подъемную силу поверхности при их выдвижении.
Подобным образом элероны 6G, 6D шарнирно закреплены на оси вращения на упомянутых крыльях (2G, 2D) так, чтобы принимать различные положения отклонения относительно крыльев.
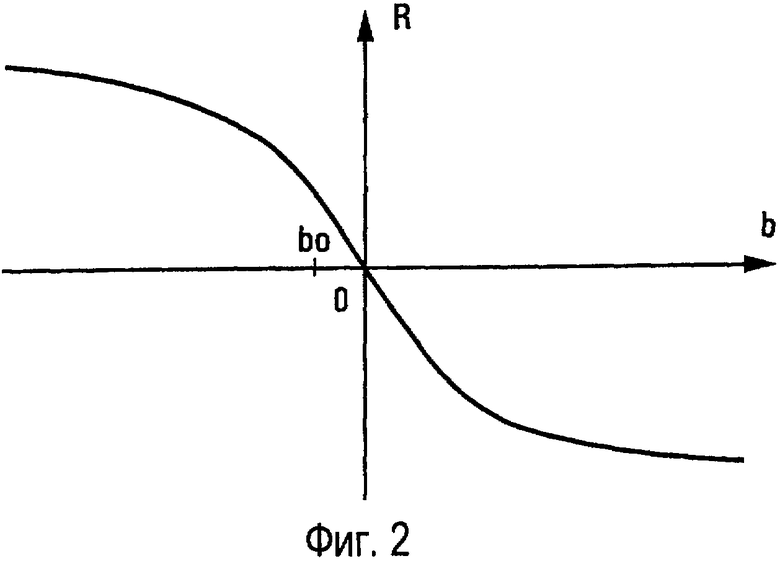
На фиг.2 представлен известный график, иллюстрирующий эффективность R элеронов 6G, 6D в поперечном управлении самолетом 1 как функцию от угла b отклонения упомянутых элеронов. На этом графике положительные углы b соответствуют отклонению вниз, а отрицательные углы b - отклонению вверх. Из данного известного графика легко заметить, что эффективность R упомянутых элеронов в поперечном управлении остается высокой до тех пор, пока угол b отклонения близок к нулю. Таким образом, при отрицательном значении b0, близком к нулю, к примеру, по большей мере равном -5°, эффективность элеронов в поперечном управлении практически так же высока, как и при нулевом угле отклонения.
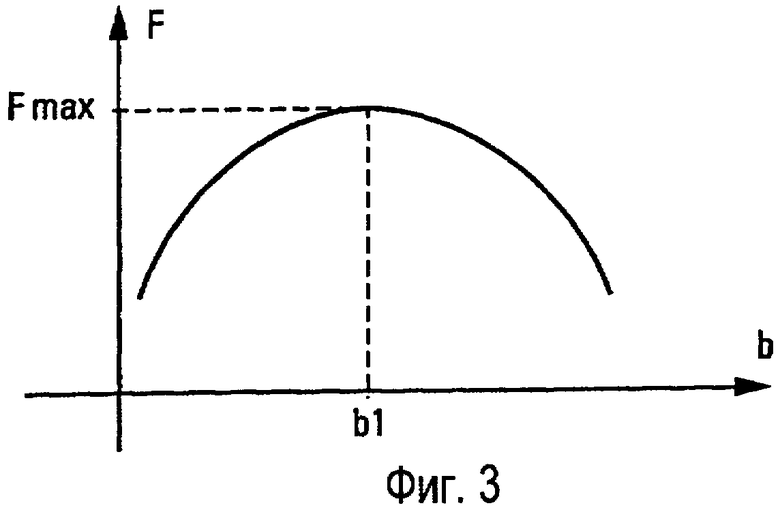
Кроме того, на фиг.3 представлен другой известный график, иллюстрирующий аэродинамические характеристики F самолета 1, то есть отношение его подъемной силы к его лобовому сопротивлению, как функцию от упомянутого угла b отклонения элеронов 6G, 6D. По графику видно, что упомянутые аэродинамические характеристики достигают максимума Fmax при положительном значении b1 упомянутого угла b отклонения.
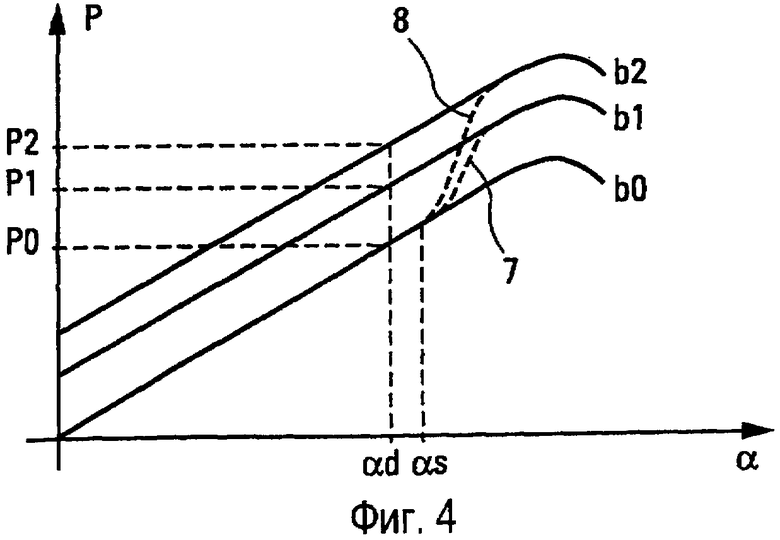
И, наконец, на фиг.4 представлен третий известный график, иллюстрирующий подъемную силу P самолета 1, как функцию от его угла α атаки при отрицательном значении b0 и положительных значениях b1 и b2 (при b2>b1) угла b отклонения элеронов 6G, 6D. Последний график показывает, что при определенном значении αd от α, соответствующие значения P0, P1 или P2 подъемной силы P увеличиваются по мере увеличения значения угла b отклонения.
Далее дается описание настоящего изобретения в отношении схематического чертежа, представленного на фиг.5, с опорой на характеристики, изображенные на фиг.2, 3, и 4.
Устройство, предназначенное для реализации способа в соответствии с изобретением и представленное на схематическом чертеже фиг.5, содержит:
- первое устройство 11 сравнения, которое принимает на одном из его входов сумму текущего угла α атаки самолета 1 и слагаемого К1·q, состоящего из произведения положительной постоянной K1 и текущей угловой скорости q по тангажу упомянутого самолета, а на другом входе - пороговую величину αs угла атаки, значение которого зависит от положения предкрылков 4G, 4D, закрылков 5G, 5D и числа Маха, при этом первое устройство 11 сравнения передает сигнал только в том случае, когда выражение α+К1·q равно или больше, чем αs;
- второе устройство 12 сравнения, которое принимает на одном из его входов сумму текущей скорости Vc самолета 1 и слагаемого К2·dVc/dt, состоящего из произведения положительной постоянной K2 и производной dVc/dt от скорости упомянутого самолета, а на другом входе - пороговую величину Vs скорости, значение которой зависит от положения предкрылков 4G, 4D, закрылков 5G, 5D и числа Маха, при этом второе устройство 12 сравнения передает сигнал только в том случае, когда выражение Vc+К2·dVc/dt равно или меньше, чем Vs;
- логический элемент 13, выполняющий операцию ИЛИ, входы которого соответственно соединены с выходами устройств 11 и 12 сравнения;
- первый переключатель 14, принимающий на свои входы, соответственно, два положительных значения b1 и b2 угла b отклонения, которые соответствуют максимальным аэродинамическим характеристикам Fmax и оптимальной подъемной силе Р2 самолета 1 соответственно, при этом упомянутый переключатель 14 направляет одно или другое из этих значений b1 или b2 на его выход в ответ на команду 15, соответствующую тому, находится ли самолет 1 на этапе взлета (или этапе повторного взлета) или на этапе посадки соответственно;
- второй переключатель 16, принимающий на свои два входа, соответственно, отрицательное значение b0 и одно или другое из положительных значений b1 или b2 (в качестве функции от сигнала управления 15 первого переключателя 14), при этом упомянутый второй переключатель 16, действующий по командам выхода логического элемента 13, направляет либо отрицательное значение b0, либо одно или другое из положительных значений b1, b2 на фильтр 17; и
- сумматор 18, позволяющий прибавлять к команде db пилотирования, предназначенной для элеронов 6G, 6D, одно или другое из значений b0, b1 или b2.
По схематическому чертежу, фиг.1, четко видно, что в конфигурации с увеличенной подъемной силой крыльев 2G, 2D:
- когда выражение α+К1·q меньше пороговой величины αs угла атаки, а выражение Vc+К2·dVc/dt больше пороговой величины Vs скорости, логический элемент 13 не передает никакого сигнала, таким образом, отрицательное отклонение b0 совокупно сообщается элеронам 6G, 6D через фильтр 17 и после возможного прибавления команды db поперечного управления. Из графика на фиг.2 и из приведенных пояснений станет очевидно, что небольшое отрицательное отклонение b0 дает возможность эффективного поперечного управления; и
- когда выражение α+К1·q равно или больше пороговой величины αs угла атаки или выражение Vc+К2·dVc/dt равно или меньше пороговой величины Vs скорости, логический элемент 13 переключает второй переключатель 16, таким образом, положительное отклонение b1, соответствующее взлету, либо положительное отклонение b2, соответствующее посадке (в качестве функции от состояния первого переключателя 15), совокупно сообщается элеронам 6G, 6D через фильтр 17 и после возможного прибавления команды db поперечного управления. Отклонения b1 и b2 могут составлять порядка 5° и 10° соответственно.
На фиг.4 пунктирными линиями 7 и 8 показано соответственно переключение из положения отклонения b0, с одной стороны, в положение отклонения b1 или b2, с другой стороны, при переключении упомянутого второго переключателя 16.
Следует отметить, что благодаря действию фильтра 17 переключение из положения отклонения b0 в положение отклонения b1 или b2 происходит плавно, без рывков.
Второй переключатель 16 может быть с одним устойчивым состоянием и возвращаться произвольно в исходное положение, соответствующее отклонению b0, как только логический элемент 13 перестанет направлять ему сигналы. Как вариант, второй переключатель 16 может быть с двумя устойчивыми состояниями и оставаться в переключенном положении, соответствующем отклонению b1 или b2, даже если логический элемент 13 больше не направляет ему сигналы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ ТИПА ЛЕТАЮЩЕЕ КРЫЛО | 2019 |
|
RU2744692C2 |
| Конвертоплан | 2024 |
|
RU2835584C1 |
| СПОСОБ СОЗДАНИЯ СИСТЕМЫ СИЛ ЛЕТАТЕЛЬНОГО АППАРАТА САМОЛЕТНОЙ СХЕМЫ И НАЗЕМНО-ВОЗДУШНАЯ АМФИБИЯ (НВА) ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2127202C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2007 |
|
RU2364548C2 |
| АЭРОДИНАМИЧЕСКИЙ ОРГАН УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2022 |
|
RU2792369C1 |
| САМОЛЁТ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2018 |
|
RU2742496C2 |
| ЛЕГКИЙ МНОГОРЕЖИМНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2007 |
|
RU2348568C1 |
| ВИНТОКРЫЛЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ | 2014 |
|
RU2563921C1 |
| АЭРОДИНАМИЧЕСКАЯ СХЕМА САМОЛЕТА | 1994 |
|
RU2090445C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2493053C1 |
Изобретение относится к способу и устройству пилотирования летательного аппарата, оптимизирующим управление элеронами с увеличенной подъемной силой. Способ заключается в том, что в конфигурации крыльев с применением увеличивающих подъемную силу поверхностей элеронам придается одинаковое положение на двух крыльях, когда первое состояние соответствует положению отклонения вверх на угол, при котором элероны сохраняют свою эффективность, второе состояние соответствует либо первому, либо второму отклонению вниз на значение, приблизительно равное оптимальной подъемной силе. Устройство содержит первое и второе средства сравнения угла атаки и скорости, логическое средство, которое принимает результаты сравнений, первое и второе средство переключения для выбора между первым и вторым отклонением и положением отклонения вверх на угол, при котором элероны сохраняли бы свою эффективность в поперечном управлении. Достигается высокая эффективность управления элеронами в поперечном управлении. 3 н. и 6 з.п.ф-лы, 5 ил.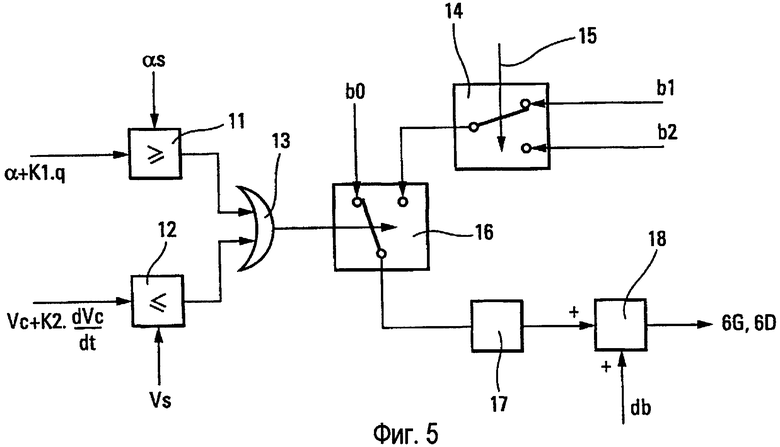
1. Способ пилотирования летательного аппарата (1), содержащего два симметричных крыла (2G, 2D), оснащенных подвижными аэродинамическими поверхностями (4G, 4D, 5G, 5D), увеличивающими подъемную силу, способными придавать упомянутым крыльям либо гладкую конфигурацию, либо конфигурацию с применением, по меньшей мере, одной увеличивающей подъемную силу поверхности и элеронами (6G, 6D) для поперечного управления, нейтральное положение которых соответствует нулевому отклонению, при котором упомянутые крылья имеют гладкую конфигурацию, при этом в конфигурации крыльев с применением увеличивающих подъемную силу поверхностей упомянутым элеронам (6G, 6D) придается одинаковое положение на двух крыльях и, без учета возможной команды (db) поперечного управления, когда угол атаки и скорость летательного аппарата соответственно меньше пороговой величины (αs) угла атаки и больше пороговой величины (Vs) скорости, первое состояние (b0) соответствует положению отклонения вверх на угол, при котором упомянутые элероны (6G, 6D) почти полностью сохраняют свою эффективность в поперечном управлении, и когда угол атаки летательного аппарата равен или больше упомянутой пороговой величины (αs) угла атаки или когда скорость летательного аппарата равна или меньше упомянутой пороговой величины (Vs) скорости, второе состояние соответствует либо первому отклонению (b1) вниз на значение, соответствующее, по меньшей мере, приблизительно максимальным аэродинамическим характеристикам (Fmax) летательного аппарата, если летательный аппарат находится на этапе взлета или повторного взлета, либо второму отклонению (b2) вниз на значение, соответствующее, по меньшей мере, приблизительно оптимальной подъемной силе (Р2) летательного аппарата, если летательный аппарат находится на этапе посадки.
2. Способ по п.1, в котором положение при угле α атаки относительно упомянутой пороговой величины αs угла атаки определяется путем сравнения выражения α+K1·q с упомянутой пороговой величиной αs, где К1 - коэффициент положительной постоянной, и q - угловая скорость по тангажу упомянутого летательного аппарата.
3. Способ по п.2, в котором упомянутая пороговая величина αs угла атаки зависит от положения упомянутых увеличивающих подъемную силу аэродинамических поверхностей и от числа Маха.
4. Способ по п.1, в котором положение при скорости Vc летательного аппарата относительно упомянутой пороговой величины Vs скорости определяется путем сравнения выражения Vc+K2·dVc/dt с упомянутой пороговой величиной Vs, где К2 - постоянный коэффициент положительной постоянной, а dVc/dt - ускорение упомянутого летательного аппарата.
5. Способ по п.4, в котором упомянутая пороговая величина (Vs) скорости зависит от положения упомянутых увеличивающих подъемную силу аэродинамических поверхностей и от числа Маха.
6. Способ по п.1, в котором после переключения из упомянутого первого состояния во второе упомянутые элероны остаются в упомянутом втором состоянии, даже если условия угла атаки и скорости снова будут соответствовать первому состоянию.
7. Способ по п.1, в котором после переключения из упомянутого первого состояния во второе упомянутые элероны переключаются обратно в упомянутое первое состояние, когда условия угла атаки и скорости снова будут соответствовать упомянутому первому состоянию.
8. Устройство для реализации способа по п.1, в котором оно содержит первое средство (11) сравнения для сравнения упомянутого угла α атаки с упомянутой пороговой величиной αs угла атаки, второе средство (12) сравнения для сравнения упомянутой скорости Vc с упомянутой пороговой величиной Vs скорости, логическое средство (13), выполняющее операцию ИЛИ, которое принимает результаты сравнений, выполненных упомянутыми первым и вторым средствами (11, 12) сравнения, первое средство (14) переключения для выбора между упомянутым первым отклонением и упомянутым вторым отклонением и второе средство (16) переключения, включаемое упомянутым логическим средством (13) и предназначенное для выбора между результатом выбора упомянутого первого средства (14) переключения и упомянутым положением отклонения вверх на угол, при котором элероны (6G, 6D) почти полностью сохраняли бы свою эффективность в поперечном управлении.
9. Летательный аппарат, реализующий способ по п.1.
| Николаев Л.Ф | |||
| Аэродинамика и динамика полета транспортных самолетов | |||
| - М.: Транспорт, 1990, с.107-108 | |||
| Пила для дерева | 1945 |
|
SU75966A1 |
| СПОСОБ ДИАГНОСТИКИ ЗАДЕРЖКИ РОСТА ПЛОДА | 2010 |
|
RU2425379C1 |

