Техническое решение относится к движителям подводного транспорта, конкретнее к движителям подводных роботов.
Известен движитель Чичигина (патент РФ №2089441, МПК B63H 1/34, B63H 1/04, опубл. 10.09.1997), содержащий гребные лопасти-плицы, установленные на стойках, шарнирно соединенных непосредственно и через упоры с замкнутыми цепями, охватывающими несущие колеса. Недостатком данного движителя является неспособность перемещаться по подводному грунту высокой рыхлости.
Известно судовое гребное колесо (патент СССР №1299896, МПК B63H 1/04, опубл. 30.03.1987), содержащее радиально установленные плицы с эластичными вставками. Недостатком данного движителя является неспособность плиц погружаться в грунт и удерживать транспортное средство при течении.
Известен циклоидный движитель Федчишина В.Г. (патент РФ №2060203, МПК B63H 1/04, B63H 1/06, B63H 1/08, опубл. 20.05.1996), содержащий ротор с приводным валом, центральной шестерней, соединенной с червячным колесом и лопастями с насаженными на их оси ведомыми коническими шестернями. Недостатком данного движителя является его неспособность к взаимодействию с илистым дном, а также к сопротивлению придонным течениям.
Прототипом предлагаемого движителя является колесный движитель (патент РФ №2368533, МПК B63H 1/04, опубл. 27.09.2009), содержащий цилиндрический обод с жестко установленными на нем лопатками. Недостатком данного движителя является его неспособность к взаимодействию с грунтом высокой рыхлости или вязкости, а также к сопротивлению придонным течениям большой силы.
Задачей предлагаемого изобретения является обеспечение подводного транспорта способностью передвигаться как в толще воды, так и по подводному грунту, в том числе и илистому, создавая при этом минимальный шумовой эффект, а также возможностью находиться в неподвижном состоянии при выключенных двигателях в условиях придонных течений.
Решение поставленной задачи достигается тем, что в отличие от известного технического решения предлагаемый движитель содержит подвижные радиально расположенные спицы, которые состоят из плоской и цилиндрической частей и имеют возможность совершать возвратно-поступательные движения. Движитель оборудован эксцентриком с приводным валом эксцентрика, соосным приводному валу обода, при взаимодействии с валом эксцентрик имеет возможность поворачиваться вокруг оси приводного вала и фиксироваться под любым углом. Радиальные спицы имеют плоскую часть, плоскость которых параллельна оси вращения, и цилиндрическую часть, выступающую за пределы обода. Плоская часть спицы одним концом свободно проходит через отверстие в цилиндрической поверхности обода, на другом конце спица имеет паз для скользящего крюкообразного зацепления с плоской частью эксцентрика.
Передвижение подводного аппарата в толще воды осуществляется посредством отталкивания плоской частью спиц от воды, а передвижение по дну - благодаря проникновению цилиндрической части спиц в грунт. При передвижении по грунту высокой рыхлости спицы погружаются в него и цилиндрической, и плоской частями. При выключенных двигателях спицы выполняют функцию якоря.
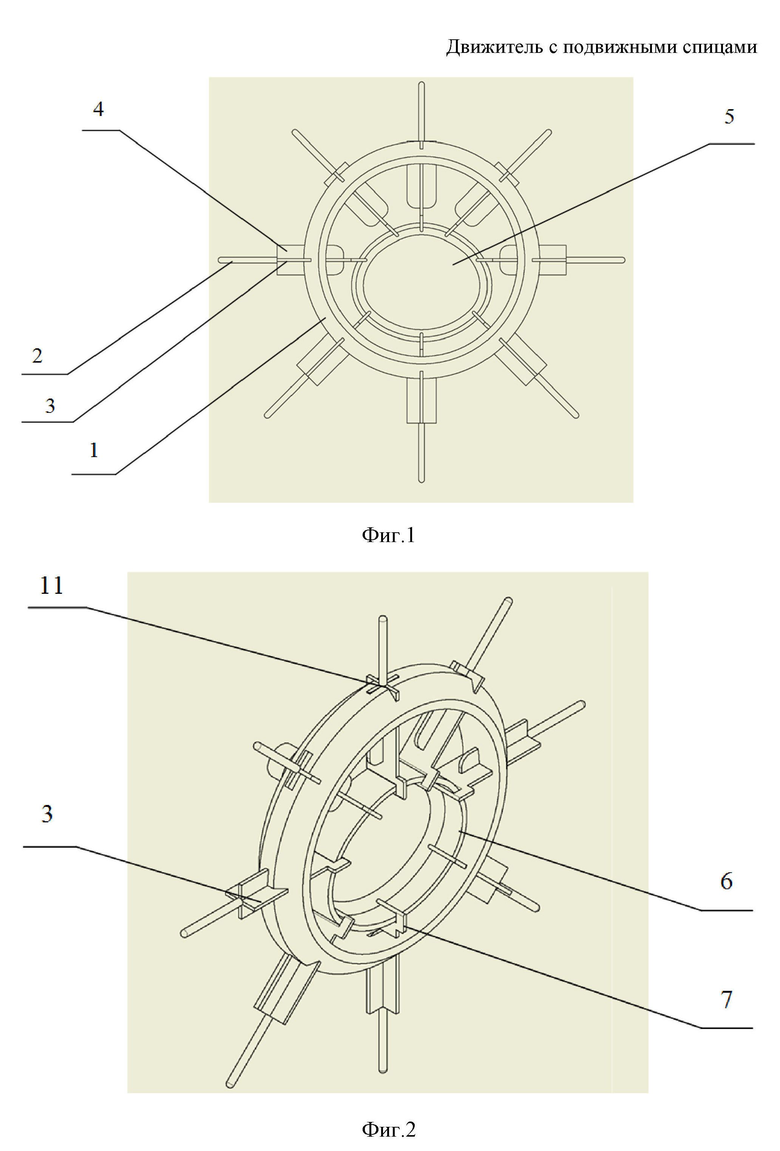
На фиг.1 представлена фронтальная проекция движителя с подвижными спицами без крышки, закрывающей внутренний механизм от воздействия внешней среды.
На фиг.2 представлена аксонометрическая проекция движителя с подвижными спицами.
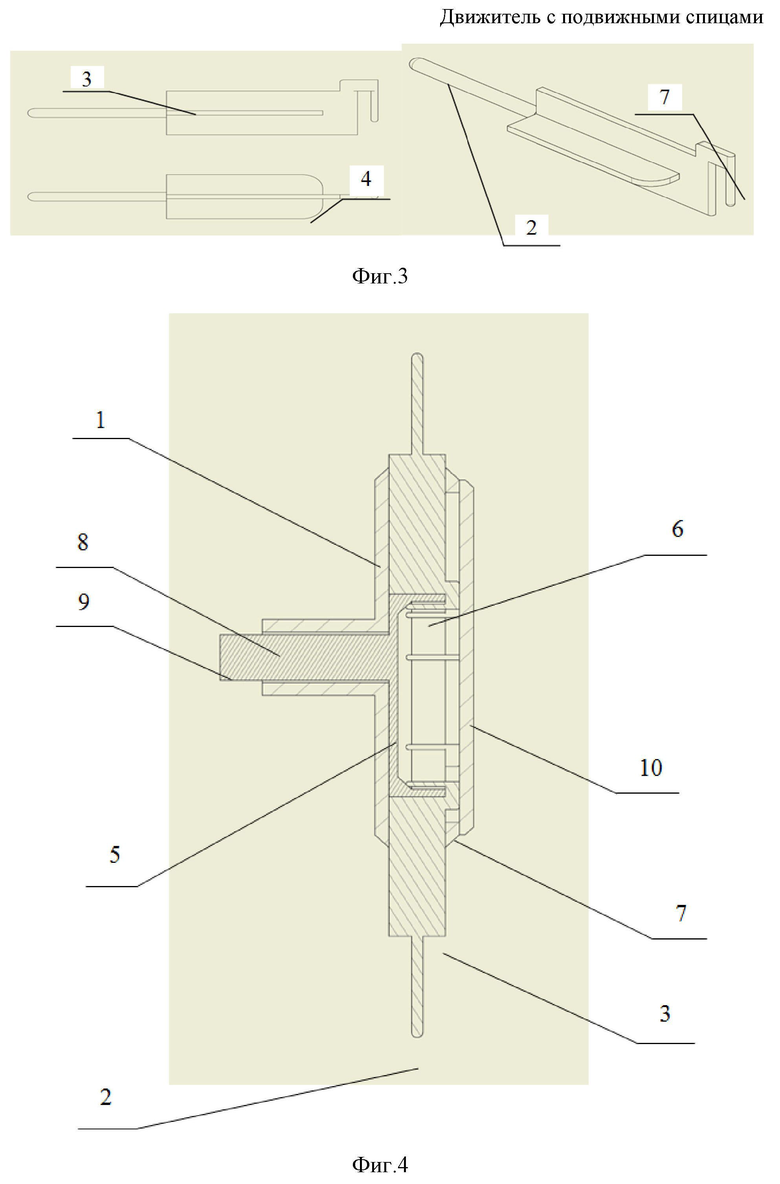
На фиг.3 - ортогональные и аксонометрическая проекции спиц.
На фиг.4 - профильный разрез движителя с подвижными спицами.
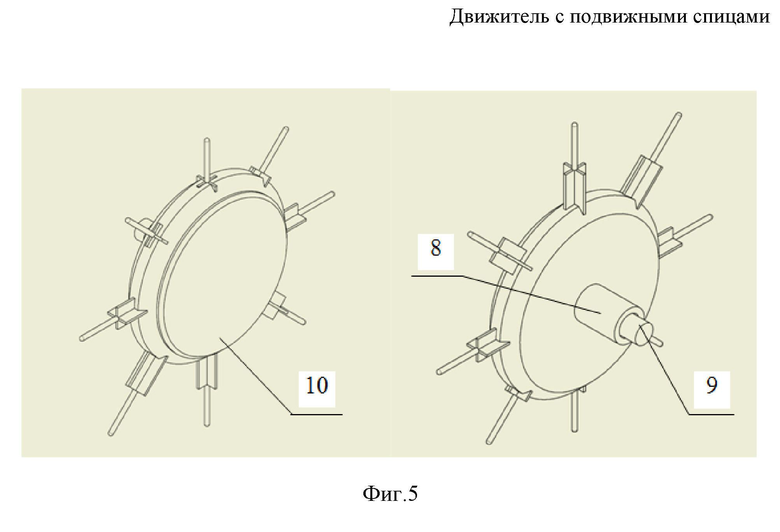
На фиг.5 - аксонометрические проекции движителя с подвижными спицами (вид спереди и сзади).
Предлагаемый движитель содержит толстостенный цилиндрический обод (1) (фиг. 1), спицы, состоящие из цилиндрической (2) и плоской частей (3) с ребрами жесткости (4), толстостенный эксцентрик (5), к стенке (6) которого спицы присоединены посредством крюкообразного зацепления (7), два коаксиальных вала: приводной вал обода (8) (фиг.4) и приводной вал эксцентрика (9), крышку (10); в ободе имеются отверстия (11) (фиг.2).
Основание эксцентрика (5) может иметь форму овоида, причем удвоенный радиус большей дуги овоида равен разнице радиуса обода (1) и его толщины, за вычетом места для крюкообразного зацепления (7), а радиус меньшей дуги равен разнице радиуса обода (1) и длины плоской части (3) спиц. Ось вращения вала эксцентрика (9) проходит через центр окружности, образующей меньшую дугу овоида.
Движитель имеет два режима работы: передвижение в толще воды и по дну.
Работа движителя с подвижными спицами в условиях передвижения в толще воды заключается в том, что обод (1), вращаясь вокруг своей оси, заставляет спицы периодично скрывать свою плоскую часть (3) в отверстиях (11) обода (1), потому что эксцентрик (5), будучи зафиксированным в определенном положении, заставляет спицы посредством скольжения крюкообразного зацепления (7) по своей стенке (6) совершать поступательные движения в радиальном направлении относительно обода (1), причем смена ориентации эксцентрика (5) с помощью вала (9) при неизменном вращении обода (1) на валу (8) изменит сектор обода (1), в котором плоская часть (3) спиц будет находиться вне отверстий (11); в результате движение подводного аппарата происходит посредством отталкивания плоской частью (3) спиц от воды, что позволяет двигаться в любом направлении в горизонтальной плоскости, а также изменять угол наклона подводного аппарата во время плавания.
Оси вращения приводного вала (8) и приводного вала (9) совпадают, причем вал (9) находится внутри вала (8), т.к. последний полый, т.е. валы (8) и (9) коаксиальны. Ось вращения обода (1) совпадает с осью вращения вала (8). Вращение вала (8), находящегося в жестком соединении с ободом (1), вызывает вращение последнего. Вал (9) жестко соединен с эксцентриком (5). Вращение вала (9) вызывает вращение эксцентрика (5) вокруг оси вала (9).
Работа движителя с подвижными спицами в условиях езды по твердому дну заключается в том, что спицы, находясь в состоянии максимальной длины, что достигается ориентацией эксцентрика (5) широкой его частью вниз, своей цилиндрической частью (2) частично погружаются в грунт и вращение обода (1) приводит подводный аппарат в движение. Степень погружения спиц в грунт зависит от твердости последнего. Данный режим позволяет перемещаться подводному аппарату на малых оборотах в отсутствие шумового эффекта. При передвижении по илистому дну спицы погружаются в грунт и цилиндрической (2), и плоской (3) частями.
Оба режима работы движителя с подвижными спицами обеспечивают подводный аппарат высокой проходимостью в различных условиях работы и свойств дна водоема. Причем проникновение спиц в грунт при отключенных двигателях заменяет собой якорь.
Технический результат изобретения - обеспечение подводного транспорта способностью передвигаться как в толще воды, так и по подводному грунту, в том числе илистому, создавая при этом минимальный шумовой эффект, а также возможностью сцепления с грунтом в неподвижном состоянии при выключенных двигателях в условиях придонных течений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесно-лопастной движитель транспортного средства | 1991 |
|
SU1789418A1 |
| Колёсный движительно-рулевой комплекс с поворотными плицами | 2017 |
|
RU2669486C1 |
| Колесно-лопастной движитель транспортного средства | 2019 |
|
RU2711134C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2009 |
|
RU2399500C1 |
| Гребное колесо для судов | 1932 |
|
SU41369A1 |
| Способ работы крыльчатого движителя и устройство для его осуществления | 2019 |
|
RU2720699C1 |
| МОБИЛЬНЫЙ РОБОТ | 1991 |
|
RU2026227C1 |
| СУДОВОЕ ГРЕБНОЕ КОЛЕСО "ВАСЯ" | 1991 |
|
RU2123452C1 |
| Движитель, основанный на использовании реактивной силы, возникающей при изменении направления воздушного (водяного) потока | 1930 |
|
SU27563A1 |
| ДВИГАТЕЛЬНО-ДВИЖИТЕЛЬНАЯ УСТАНОВКА ПОДВОДНОГО АППАРАТА | 2022 |
|
RU2783719C1 |
Изобретение относится к движителям подводного транспорта, а именно к движителям подводных роботов. Движитель с подвижными спицами содержит цилиндрический обод, приводной вал обода и радиальные спицы и оборудован эксцентриком и приводным валом эксцентрика. Ось вращения обода совпадает с осью вращения вала. Эксцентрик имеет возможность поворачиваться вокруг оси своего приводного вала и фиксироваться под любым углом. Радиальные спицы имеют плоскую часть, плоскость которых параллельна оси вращения, и цилиндрическую часть, которая выступает за пределы обода. Плоская часть спицы одним концом свободно проходит через отверстие в цилиндрической поверхности обода, а на другом конце имеет паз для скользящего крюкообразного зацепления с плоской частью эксцентрика. При вращении цилиндрического обода радиальные спицы имеют возможность совершать возвратно-поступательные движения. Достигается эффективность передвижения подводного транспорта как в воде, так и по подводному грунту или илу. 1 з.п. ф-лы, 5 ил.
1. Движитель с подвижными спицами, содержащий цилиндрический обод, приводной вал обода и радиальные спицы, отличающийся тем, что он оборудован эксцентриком и приводным валом эксцентрика, соосным приводному валу обода, эксцентрик имеет возможность поворачиваться вокруг оси своего приводного вала и фиксироваться под любым углом, радиальные спицы имеют плоскую часть, плоскость которых параллельна оси вращения, и цилиндрическую часть, выступающую за пределы обода, при этом плоская часть спицы одним концом свободно проходит через отверстие в цилиндрической поверхности обода, а на другом конце имеет паз для скользящего крюкообразного зацепления с плоской частью эксцентрика так, что при вращении цилиндрического обода радиальные спицы имеют возможность совершать возвратно-поступательные движения.
2. Движитель с подвижными спицами по п.1, отличающийся тем, что эксцентрик выполнен в форме овоида, причем удвоенный радиус большей дуги овоида равен разнице радиуса обода и его толщины за вычетом длины крюкообразного зацепления, а радиус меньшей дуги равен разнице радиуса обода и длины плоской части спиц.
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2005 |
|
RU2368533C2 |
| Колесно-лопастной движитель транспортного средства | 1991 |
|
SU1789418A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| US 7980907 B1, 19.07.2011. | |||

