Система позиционирования предназначена для определения количества вагонов (включая локомотивы), порядкового номера вагона в составе, учета и контроля суточного движения вагонов с различным типом груза согласно данным натурных листов, длины единицы состава в железнодорожных составах, определения направления движения состава и выдачи и регистрации сигналов о прохождении единицы состава.
Система предназначена для работы с основными типами вагонов и локомотивов, использующихся на железнодорожном транспорте.
Известно устройство для счета осей железнодорожных подвижных составов, которое содержит два излучателя, два приемника излучений, схему И, две схемы определения направления движения состава и два счетчика осей (колесных пар) (РФ 93018849, B61L 1/16, опубл. 20.10.1995).
Известно устройство для определения угла набегания колеса грузового вагона на рельс, содержащее рельсовый путь, колесную пару вагона, два напольных светоизлучателя, ориентированные в противоположные стороны от оси рельсового пути, два светоприемника, каждый из которых ориентирован на соответствующий светоизлучатель, и блок обработки, подключенный входами к выходам светоприемников, а выходом к регистратору, в котором каждый из светоприемников выполнен в виде линейки из n расположенных с фиксированным шагом фотоэлементов, причем правая и левая линейки установлены на пути параллельно и симметрично относительно рельсовой колеи в зоне засветки светоизлучателями на высоте, соответствующей линии, проходящей от светоизлучателя через точку над головкой рельса на высоте проследования оси колесной пары, а блок обработки выполнен в виде счетчика максимальной разности затемненных или засвеченных фотоэлементов правой и левой светоприемных линеек (РФ 94038395, В61K 9/04, опубл. 10.09.1996).
Принципиальный недостаток всех приведенных в патентах систем заключается в том, что они считают не вагоны, а оси или колесные пары. Разные типы вагонов могут содержать разное количество осей/пар. Таким образом, число осей/пар еще не дает нам общее число вагонов и порядковый номер вагона в проходящем составе.
В основу изобретения положена задача создания системы позиционирования в составах железнодорожного транспорта, которая позволяет с большой точностью считать вагоны с корпусами любой сложности, а не колесные пары. Это позволяет ее использовать в автоматических системах учета и контроля, системах железнодорожной безопасности и т.д.
Решение поставленной технической задачи обеспечивается тем, что в системе позиционирования в составах железнодорожного транспорта, включающей излучатели, приемники излучения и блок обработки, три оптических лазерных датчика положения защищены термостабилизирующими кожухами, которые подключены к блоку обработки, включающему микропроцессорные контроллеры и компьютерное оборудование, излучатель датчика положения установлен слева от оси железнодорожного пути по ходу движения состава на расстоянии 2,25-2,45 м от края термостабилизирующего кожуха до оси ж/д пути, на высоте 0,4 м от уровня головки рельса, при этом термостабилизирующий кожух с излучателем датчика закреплен под углом 27°, а на противоположной стороне от оси железнодорожного пути на расстоянии 2,0 м от оси и на высоте 3,0 м от уровня головки рельса установлен приемник датчика соосно излучателю.
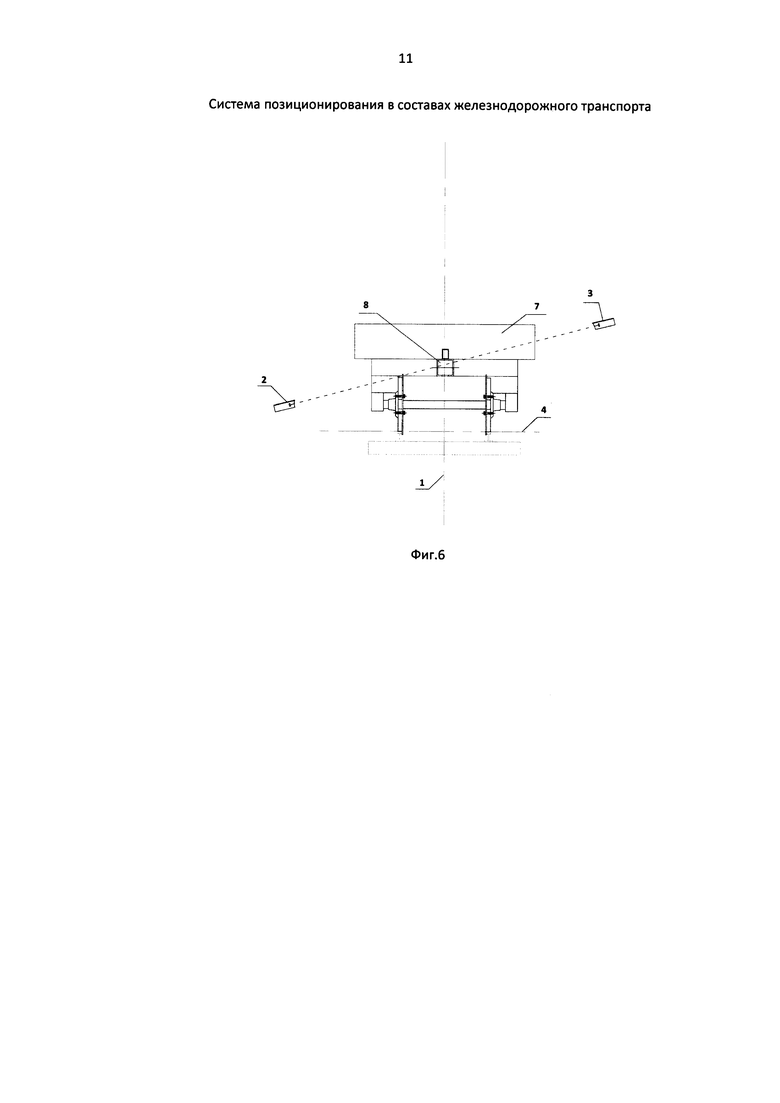
Изобретение поясняется фиг. 1-6. На фиг. 1 представлено расположение датчиков. На фиг. 2-6 показаны варианты размещения датчиков.
Условные обозначения:
1. Ось железнодорожного пути
2. Излучатель оптических датчиков положения
3. Приемник оптических датчиков положения
4. Уровень головок рельс
5. Вагон
6. Полувагон
7. Платформа
8. Сцепка вагонов
Система позиционирования в составах железнодорожного транспорта (см. фиг. 1) содержит три оптических лазерных датчика положения, защищенных термостабилизирующими кожухами, которые подключены к блоку обработки. Блок обработки содержит микропроцессорные контроллеры и компьютерное оборудование. Излучатель датчика положения 2 установлен слева от оси железнодорожного пути 1 по ходу движения состава на расстоянии 2,25-2,45 м от края термостабилизирующего кожуха до оси ж/д пути 1, на высоте 0,4 м от уровня головки рельса 4. Термостабилизирующий кожух с излучателем 2 датчика закреплен под углом 27°. На противоположной стороне от оси железнодорожного пути 1 на расстоянии 2,0 м от оси и на высоте 3,0 м от уровня головки рельса 4 установлен приемник датчика 3 соосно излучателю 2.
Количество датчиков положения - три, расстояние между ними 2,6 м и 1,7 м позволяют однозначно различить единицы подвижного состава (вагоны и локомотивы) при движении состава в диапазоне скоростей 0-10 км/ч.
Расстояние от датчиков до бортов вагонов лимитируется требованиями ГОСТ 9238-2013 "Габариты железнодорожного подвижного состава и приближения строений".
Высота установки излучателя датчика 2-0,4 м и угол наклона датчиков - 27° выбраны с целью охвата системой позиционирования всех возможных типов вагонов, использующихся на железнодорожном транспорте. Изменение этих параметров приведет к тому, что система не сможет правильно идентифицировать некоторые типы вагонов, что иллюстрируется на фиг. 5-6.
При прохождении состава происходит поочередное срабатывание лазерных датчиков положения (барьерных датчиков), выдающих дискретный сигнал о наличии препятствия на пути лазерного луча от излучателя 2 до приемника 3. Дальнейшая обработка этих сигналов на микропроцессорных контроллерах и компьютерном оборудовании позволяет определить количество вагонов, порядковый номер вагона в составе, длину вагона и направление движения состава.
Использование термостабилизирующих кожухов позволяет расширить температурный диапазон работы системы до -40 - +40°С и обеспечить работу лазерных датчиков положения при возникновении тумана, обмерзания и конденсации росы.
Основные возможности предлагаемой системы:
- Скорость движения состава - от 0 до 10 км/ч;
- Количество вагонов - не ограничено;
- Направление движения - двунаправленное;
- Условия эксплуатации - температура от -40 до +50°С, давление атмосферное, относительная влажность воздуха до 98%.
Принцип работы системы основан на обработке сигналов срабатывания лазерных датчиков положения специально разработанным программным обеспечением, с учетом использования предварительно рассчитанных и экспериментально определенных констант, в результате чего становится возможным определить время прохождения начала и конца каждой единицы состава, ее длину и направление прохождения состава.
Общее состояние системы из 3 дискретных датчиков положения можно описать численными значениями от 0 до 7. В зависимости от положения состава относительно системы позиционирования значения можно интерпретировать следующим образом:
0 - вагон находится далеко от системы,
1 - вагон состава приближается к системе,
3 - вагон вошел в систему,
4 - вагон покинул систему,
5 - вагон покинул систему,
6 - вагон выезжает из системы,
7 - вагон находится в системе.
В зависимости от состояния, в котором находится система позиционирования, и последовательности смены состояний датчиков можно определить:
- начало и конец каждого вагона,
- направление движения состава (вагона),
- производить подсчет количества вагонов в составе.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционирования в составах железнодорожного транспорта | 2019 |
|
RU2735369C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ МАССЫ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2556831C2 |
| Система определения насыпной плотности и засоренности немагнитными материалами металлического лома в полувагонах в составах железнодорожного транспорта | 2018 |
|
RU2717286C1 |
| УСТРОЙСТВО КОНТРОЛЯ ЗАСОРЁННОСТИ МЕТАЛЛОЛОМА В ДВИЖУЩИХСЯ ЖЕЛЕЗНОДОРОЖНЫХ ПОЛУВАГОНАХ | 2018 |
|
RU2690527C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ЭКСПРЕСС-КОНТРОЛЯ НЕМАГНИТНЫХ ВКЛЮЧЕНИЙ В МЕТАЛЛОЛОМЕ | 2022 |
|
RU2791133C1 |
| СПОСОБ ДИАГНОСТИКИ ПОЛОЖЕНИЯ КОЛЕСНЫХ ПАР В РАМЕ ТЕЛЕЖКИ ПАССАЖИРСКИХ И ГРУЗОВЫХ ВАГОНОВ В ЭКСПЛУАТАЦИИ | 2011 |
|
RU2466046C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| Автоматизированное контрольно-габаритное устройство для контроля подвижных железнодорожных составов | 2020 |
|
RU2735809C1 |
| СПОСОБ ИЗМЕРЕНИЯ КОЛЕС РЕЛЬСОВОГО ТРАНСПОРТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2351499C2 |
| СПОСОБ КОНТРОЛЯ ПОПЕРЕЧНОГО ПРОФИЛЯ И РАССТОЯНИЯ МЕЖДУ РЕЛЬСАМИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ВАГОН-ПУТЕИЗМЕРИТЕЛЬ | 2010 |
|
RU2418705C1 |



Изобретение относится к области железнодорожной автоматики и телемеханики. Система включает излучатели, приемники излучения, блок обработки, три оптических лазерных датчика положения, защищенных термостабилизирующими кожухами, которые подключены к блоку обработки, включающему микропроцессорные контроллеры и компьютерное оборудование. Причем излучатель датчика положения установлен слева от оси железнодорожного пути по ходу движения состава на расстоянии 2,25-2,45 м от края термостабилизирующего кожуха до оси ж/д пути на высоте 0,4 м от уровня головки рельса, при этом термостабилизирующий кожух с излучателем датчика закреплен под углом 27°, а на противоположной стороне от оси железнодорожного пути на расстоянии 2,0 м от оси и на высоте 3,0 м от уровня головки рельса установлен приемник датчика соосно излучателю. Достигается повышение надежности учета вагонов с корпусами любой сложности. 6 ил.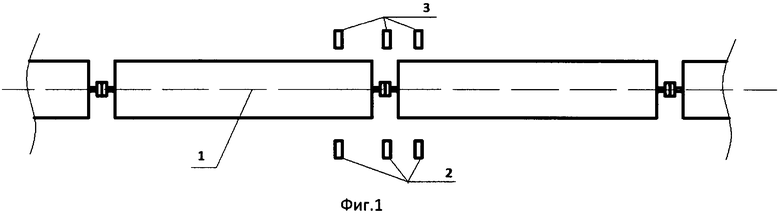
Система позиционирования в составах железнодорожного транспорта, включающая излучатели, приемники излучения и блок обработки, отличающаяся тем, что три оптических лазерных датчика положения защищены термостабилизирующими кожухами, которые подключены к блоку обработки, включающему микропроцессорные контроллеры и компьютерное оборудование, излучатель датчика положения установлен слева от оси железнодорожного пути по ходу движения состава на расстоянии 2,25-2,45 м от края термостабилизирующего кожуха до оси ж/д пути на высоте 0,4 м от уровня головки рельса, при этом термостабилизирующий кожух с излучателем датчика закреплен под углом 27°, а на противоположной стороне от оси железнодорожного пути на расстоянии 2,0 м от оси и на высоте 3,0 м от уровня головки рельса установлен приемник датчика соосно излучателю.
| RU 94038395 A1, 10.09.1996 | |||
| Устройство для счета подвижных единиц | 1986 |
|
SU1512844A1 |
| СПОСОБ ДИСТАНЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ВАГОНОВ В СОСТАВЕ ПОЕЗДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2408487C1 |
| ПАЯЛЬНИК | 1927 |
|
SU8682A1 |

