Изобретение относится к области железнодорожной автоматики и телемеханики. Система включает блок обработки, включающий микропроцессорный контроллер, и 3 датчика расстояния на средний диапазон, защищенных антивандальными кожухами и подключенными к блоку обработки. Причем датчики расстояния на средний диапазон расположены в одной точке на расстоянии 2,0 метра от оси железнодорожного пути на высоте 4,0 метра от уровня головок рельс и имеют наклон вниз относительно вертикали 26,5°. В горизонтальной плоскости один из датчиков расстояния на средний диапазон ориентирован перпендикулярно железнодорожному пути, а два других повернуты на 30° вправо и влево соответственно. Достигается повышение надежности учета единиц подвижного состава любого типа.
Система позиционирования предназначена для определения количества вагонов (включая локомотивы), порядкового номера вагона в составе, учета и контроля суточного движения вагонов с различным типом груза согласно данным натурных листов, длины единицы состава в железнодорожных составах, определения направления движения состава и выдачи и регистрации сигналов о прохождении единицы состава.
Система предназначена для работы с основными типами вагонов и локомотивов, использующихся на железнодорожном транспорте.
Известно устройство для счета осей железнодорожных подвижных составов, которое содержит два излучателя, два приемника излучений, схему И, две схемы определения направления движения состава и два счетчика осей (колесных пар) (РФ 93018849, B61L 1/16, опубл. 20.10.1995).
Принципиальным недостатком устройства является то, что оно считает не вагоны, а оси или колесные пары. Разные типы вагонов могут содержать разное количество осей/пар. Это приводит к ошибкам определения числа вагонов и порядковому номеру вагона в проходящем составе.
Известна система позиционирования в составах железнодорожного транспорта, которая содержит излучатели, приемники излучения, блок обработки, три оптических лазерных датчика положения, защищенных термостабилизирующими кожухами, которые подключены к блоку обработки, включающему микропроцессорные контроллеры и компьютерное оборудование (RU 2605127 C1, B61L 1/16, опубл. 20.12.2016).
Недостатком системы является ограниченная скорость прохождения железнодорожного состава (до 10 км/ч), при которой система может правильно выполнять свои функции, зависимость от погодных условий, вызванная довольно низким расположением излучателей, а также невозможность определения работоспособности излучателей при постоянном нахождении вагона (локомотива) в зоне действия датчиков.
Техническая задача изобретения – повышение надежности правильной работы системы позиционирования в составах железнодорожного транспорта. В основу изобретения положена задача создания системы позиционирования в составах железнодорожного транспорта, которая позволяет с большой точностью считать вагоны с корпусами любой сложности, при этом быстродействие системы позволяет считать вагоны, движущиеся со скоростью до 90км/ч, при неблагоприятных погодных условиях, не боящейся большого выпадения снежных осадков (или затопления железнодорожных путей). Это позволяет использовать ее в автоматических системах учета и контроля, системах железнодорожной безопасности.
Решение поставленной технической задачи обеспечивается тем, что в системе позиционирования в составах железнодорожного транспорта, состоящей из блока обработки, включающий микропроцессорный контроллер, и 3-х датчиков расстояния на средний диапазон, защищенных антивандальными кожухами и подключенными к блоку обработки, причем датчики расстояния на средний диапазон расположены в одной точке на расстоянии 2,0 метра от оси железнодорожного пути и на высоте 4,0 метра от уровня головки рельса и имеют наклон вниз относительно вертикали 26,5°, а в горизонтальной плоскости один из датчиков расстояния на средний диапазон ориентирован перпендикулярно железнодорожному пути, а два других повернуты на 30° вправо и влево соответственно.
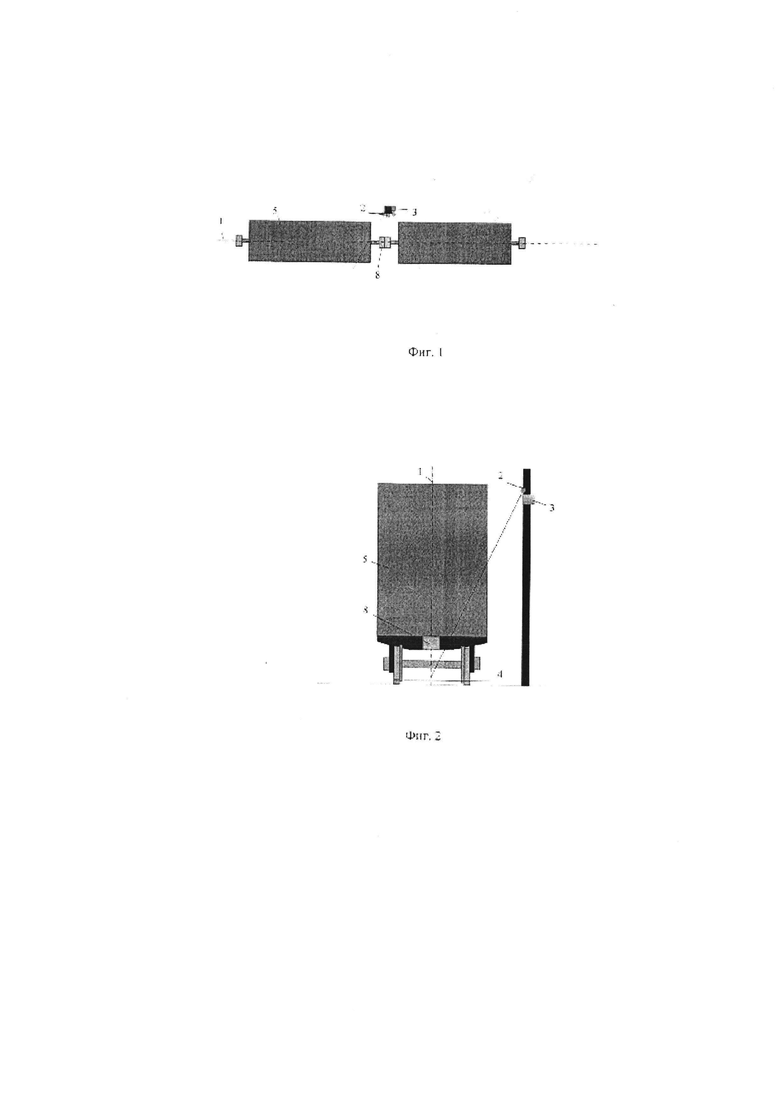
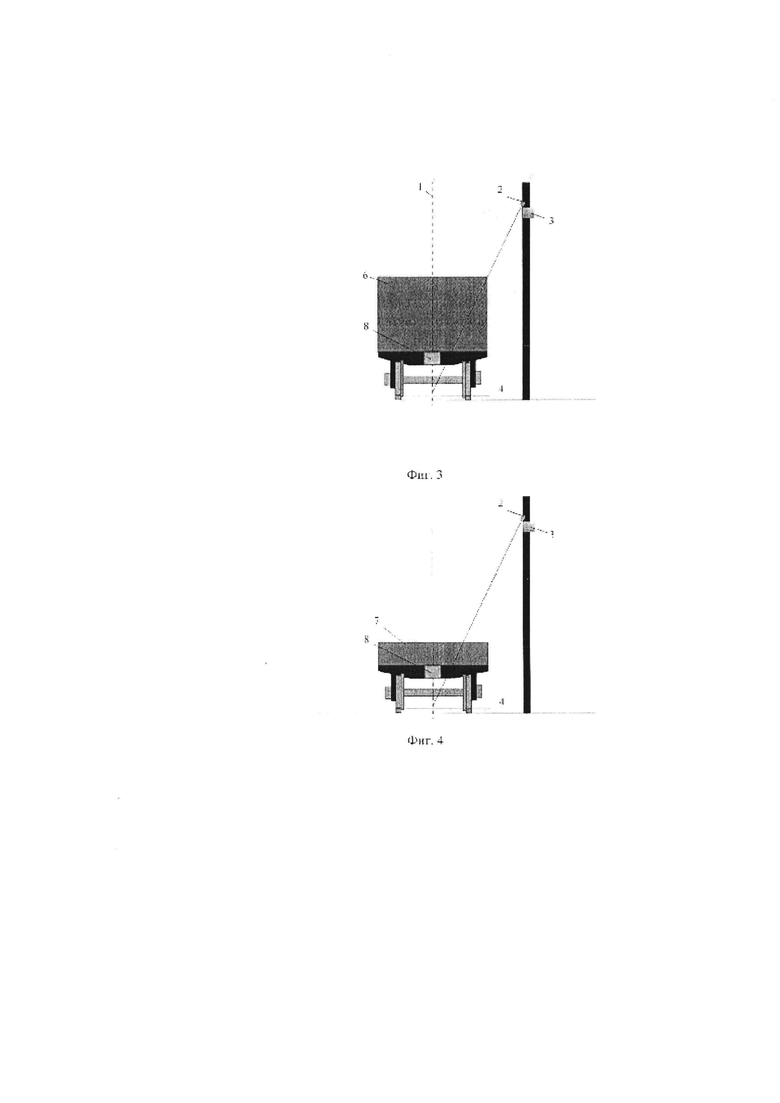
Изобретение поясняется фиг. 1-4. На фиг. 1 представлено расположение датчиков в горизонтальной плоскости. На фиг. 2-4 представлено расположение датчиков в вертикальной плоскости.
Система позиционирования в составах железнодорожного транспорта (см. фиг. 1) содержит блок обработки 3, включающий микропроцессорный контроллер, и 3 датчика расстояния на средний диапазон 2, защищенных антивандальными кожухами и подключенными к блоку обработки. Причем датчики расстояния на средний диапазон 2 расположены в одной точке на расстоянии 2,0 метра от оси железнодорожного пути 1 и на высоте 4,0 метра от уровня головок рельс 4 и имеют наклон вниз относительно вертикали 26,5°. В горизонтальной плоскости один из датчиков расстояния на средний диапазон 2 ориентирован перпендикулярно железнодорожному пути, а два других повернуты на 30° вправо и влево соответственно.
Количество датчиков расстояния на средний диапазон – три, расположены они в одной точке, что исключает необходимость ставить дополнительные опоры), расположены они на высоте 4,0 метра, что резко уменьшает возможность их повреждения от различных факторов (погодный, человеческий и т.п.), в горизонтальной плоскости один из датчиков расстояния на средний диапазон ориентирован перпендикулярно железнодорожному пути, а два других повернуты на 30° вправо и влево соответственно, что позволяет однозначно различить единицы подвижного состава (вагоны и локомотивы) при движении состава в диапазоне скоростей 0-90км/ч, и не реагировать на проходящих по железнодорожным путям людей или животных.
Расстояние датчиков до бортов вагонов лимитируется требованиями ГОСТ 9238-2013 «Габариты железнодорожного подвижного состава и приближения строений».
Высота установки датчиков расстояния на средний диапазон 4,0 метра и наклон вниз относительно вертикали 26,5° выбран с целью охвата системой позиционирования всех возможных типов вагонов, использующихся в железнодорожном транспорте.
При прохождении состава происходит поочередное уменьшение (увеличение – когда вагон или локомотив прошел) измеряемого расстояния каждого из датчиков расстояния на средний диапазон, выдающих дискретный сигнал (измеренное расстояние) с частотой до 300 раз/с. Дальнейшая обработка этих сигналов на микропроцессорном контроллере позволяет определить количество вагонов, порядковый номер вагона в составе, длину вагона и направление движение состава.
В системе используются датчики расстояния на средний диапазон с температурным диапазоном -40°С - +65°С.
Основные возможности предлагаемой системы:
- Скорость движения состава – от 0 до 90 км/ч;
- Количество вагонов – не ограничено;
- Направление движения – двунаправленное;
- Условия эксплуатации – температура от -40°С до +65°С, давление атмосферное, относительная влажность воздуха до 98%.
Принцип работы системы основан на обработке данных датчиков расстояния на средний диапазон (измеренное ими расстояние) специально разработанным программным обеспечением, с учетом использования предварительно рассчитанных и экспериментально определенных констант, в результате чего становится возможным определить время прохождения начала и конца каждой единицы состава, ее длину и направление прохождения состава.
Общее состояние системы из датчиков расстояния на средний диапазон можно описать значениями от 0 до 7. В зависимости от положения состава относительно системы, наличия посторонних объектов в поле зрения системы (людей, животных, и т.п.), правильности функционирования датчиков расстояния на средний диапазон значения состояния можно интерпретировать следующим образом:
0 – неисправен первый датчик системы (требует замены);
1 – неисправен второй датчик системы (требует замены);
2 – неисправен третий датчик системы (требует замены);
3 – в поле зрения системы присутствует помеха (люди, животные);
4 – вагон находится далеко от системы;
5 – вагон состава вошел в систему;
6 – вагон состава выезжает из системы;
7 – вагон состава находится в системе.
В зависимости от состояния, в котором находится система позиционирования, и последовательности смены состояний датчиков можно определить:
- начало и конец каждого вагона,
- направление движения состава (вагона),
- производить подсчет количества вагонов в составе,
- определять скорость движения состава (вагона),
- определять работоспособность каждого из датчиков расстояния на средний диапазон (проверять достоверность данных),
- определять наличие посторонних объектов на железнодорожных путях.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ В СОСТАВАХ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2605127C1 |
| СПОСОБ ПОЗИЦИОНИРОВАНИЯ ЛОКОМОТИВА ПО ТЕХНОЛОГИИ РАДИОЧАСТОТНОЙ ИДЕНТИФИКАЦИИ | 2024 |
|
RU2822345C1 |
| ХВОСТОВОЕ УСТРОЙСТВО КОНТРОЛЯ ЦЕЛОСТНОСТИ ПОЕЗДА | 2021 |
|
RU2764478C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| СПОСОБ ПРИЦЕЛЬНОЙ ОСТАНОВКИ ПОЕЗДА НА УЧАСТКЕ ПУТИ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 2020 |
|
RU2751589C1 |
| Устройство и способ автоматического управления электропневматическими тормозами пассажирских поездов в процессе реализации служебного торможения | 2022 |
|
RU2822934C2 |
| Система для позиционирования железнодорожного подвижного состава при закреплении механизированными устройствами | 2022 |
|
RU2788208C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СПОСОБ И СИСТЕМА ДЕЦЕНТРАЛИЗОВАННОГО ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2021 |
|
RU2763015C1 |
| МНОГОУРОВНЕВАЯ СИСТЕМА УПРАВЛЕНИЯ И ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДОВ ДЛЯ КРУПНЫХ ЖЕЛЕЗНОДОРОЖНЫХ СТАНЦИЙ | 2009 |
|
RU2403162C1 |
Система позиционирования в составах железнодорожного транспорта содержит блок обработки с микропроцессорными контроллерами и датчики расстояния на средний диапазон. Датчики защищены антивандальными кожухами и подключены к блоку обработки. Датчики расстояния на средний диапазон ориентированы на железнодорожные пути как в плоскости, перпендикулярной к железнодорожному пути, так и под острым углом к железнодорожным путям. Технический результат – повышение надежности работы системы позиционирования в составах железнодорожного транспорта. 4 ил.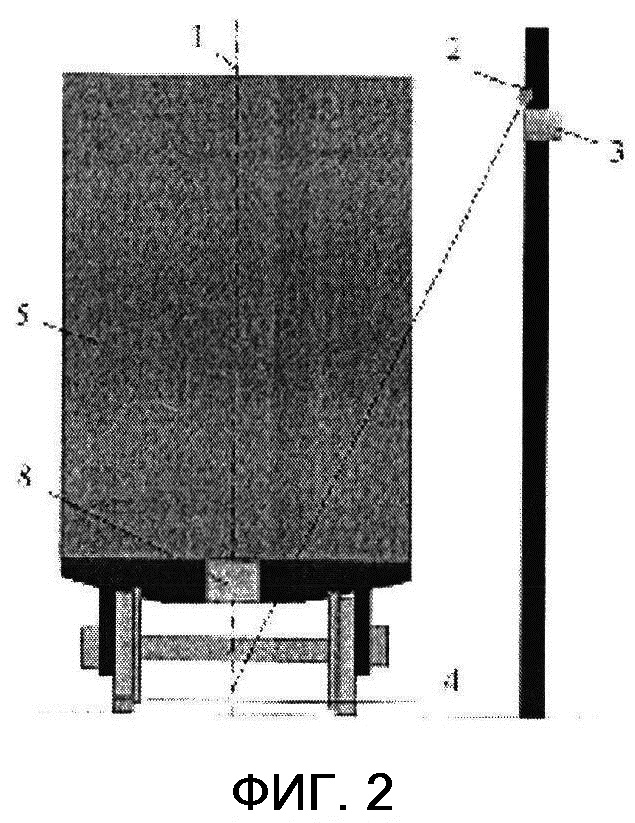
Система позиционирования в составах железнодорожного транспорта, содержащая блок обработки, включающий микропроцессорные контроллеры, отличающаяся тем, что содержит датчики расстояния на средний диапазон, защищенные антивандальными кожухами и подключенные к блоку обработки, причем датчики расстояния на средний диапазон ориентированы на железнодорожные пути как в плоскости, перпендикулярной к железнодорожному пути, так и под острым углом к железнодорожным путям.
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ В СОСТАВАХ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2015 |
|
RU2605127C1 |
| СПОСОБ ОЧИСТКИ ТЕТРАХЛОРИДА ТИТАНА | 0 |
|
SU178363A1 |
| US 10377398 B2, 13.08.2019 | |||
| US 8655540 B2, 18.02.2014 | |||
| Бессальниковый центробежный насос | 1938 |
|
SU55243A1 |

