Область техники
Изобретение относится к технике управления транспортными средствами.
Уровень техники
Наиболее близким техническим решением (прототип) является система магнитный путь (см. http://www.sciencedebate2008.com/volvo-droid-car/, дата обращения: 01.07.2015 г.). Система предназначена для ориентирования автомобиля на дороге с помощью магнитов. Система представляет собой ферритовые постоянные круглые магниты, которые устанавливают на глубине 20 сантиметров ниже дорожного полотна на продольных линиях дорожной разметки и по центру полосы движения. На передней части автомобиля установлено семь магнитных датчиков, которые определяют магниты на различных скоростях движения. Принимая данные от датчиков, блок определения положения автомобиля вычисляет текущее местоположение автомобиля на дорожном полотне.
Недостатком прототипа является недостаточная точность определения расположения автомобиля. Система не позволяет определить положение задней части автомобиля, поскольку магнитные датчики установлены только на передней части автомобиля в линию. Также система не различает знаки дорожной разметки, такие как стрелка, стоп-линия, пешеходный переход и другие.
Техническим результатом предлагаемого изобретения является увеличение точности определения расположения автомобиля, возможность определять положение задней части автомобиля, а также различать знаки дорожной разметки.
Поставленный технический результат достигается за счёт того, что в системе определения положения автомобиля на проезжей части, содержащей первый магнитный датчик, второй магнитный датчик, третий магнитный датчик, четвёртый магнитный датчик, пятый магнитный датчик, шестой магнитный датчик и десятый магнитный датчик, первый магнитный датчик, второй магнитный датчик, третий магнитный датчик, четвёртый магнитный датчик и десятый магнитный датчик прикреплены к кузову автомобиля в его передней части, а также блок определения положения автомобиля, причём второй магнитный датчик установлен на оси автомобиля, первый магнитный датчик установлен левее его по ходу движения вперёд, третий магнитный датчик установлен правее его по ходу движения вперёд, четвёртый магнитный датчик установлен правее третьего магнитного датчика по ходу движения вперёд, десятый магнитный датчик установлен левее первого магнитного датчика по ходу движения вперёд, введены седьмой магнитный датчик, восьмой магнитный датчик, девятый магнитный датчик, прикреплённые к кузову автомобиля в его задней части, а также первый компаратор, второй компаратор, третий компаратор, четвёртый компаратор, причём седьмой магнитный датчик установлен на оси автомобиля, восьмой магнитный датчик установлен левее его по ходу движения вперёд, шестой магнитный датчик установлен правее его по ходу движения вперёд, девятый магнитный датчик установлен левее восьмого магнитного датчика по ходу движения вперёд, пятый магнитный датчик установлен правее шестого магнитного датчика по ходу движения вперёд, первый магнитный датчик, второй магнитный датчик и третий магнитный датчик соединены своими выходами с соответствующими входами первого компаратора, шестой магнитный датчик, седьмой магнитный датчик, восьмой магнитный датчик соединены своими выходами с соответствующими входами второго компаратора, пятый магнитный датчик и девятый магнитный датчик соединены своими выходами с соответствующими входами третьего компаратора, а четвёртый магнитный датчик и десятый магнитный датчик соединены своими выходами с соответствующими входами четвёртого компаратора, при этом первый компаратор, второй компаратор, третий компаратор и четвёртый компаратор соединены своими выходами с соответствующими входами блока определения положения автомобиля.
Краткое описание чертежей
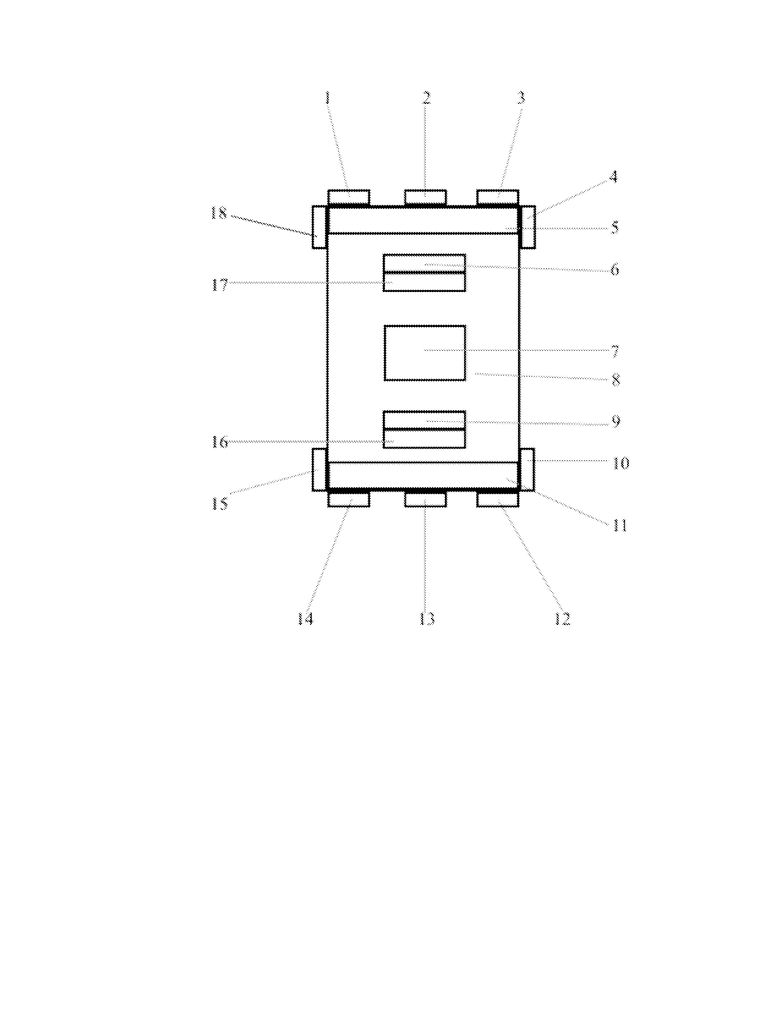
Изобретение поясняется чертежом, на котором показано расположение его основных элементов (вид сверху).
Раскрытие изобретения
На фигуре обозначены: первый магнитный датчик 1, второй магнитный датчик 2, третий магнитный датчик 3, четвёртый магнитный датчик 4, передний бампер 5, первый компаратор 6, блок определения положения автомобиля 7, кузов 8, второй компаратор 9, пятый магнитный датчик 10, задний бампер 11, шестой магнитный датчик 12, седьмой магнитный датчик 13, восьмой магнитный датчик 14, девятый магнитный датчик 15, третий компаратор 16, четвёртый компаратор 17, десятый магнитный датчик 18.
Основными элементами устройства являются кузов 8, блок определения положения автомобиля 7, компараторы (первый компаратор 6, второй компаратор 9, третий компаратор 16, четвёртый компаратор 17) и магнитные датчики (первый магнитный датчик 1, второй магнитный датчик 2, третий магнитный датчик 3, четвёртый магнитный датчик 4, пятый магнитный датчик 10, шестой магнитный датчик 12, седьмой магнитный датчик 13, восьмой магнитный датчик 14, девятый магнитный датчик 15, десятый магнитный датчик 18).
Основным несущим элементом, на котором держатся все элементы, является кузов 8 (рамный или несущий). Под кузовом 8 в данном случае понимают объёмную конструкцию из отдельных панелей или элементов, соединённых сваркой или иным способом. К кузову 8 может быть присоединена ходовая часть, передний бампер 5, задний бампер 6. Кузов 8 может содержать салон, двигатель и другие элементы.
Блок определения положения автомобиля 7 расположен в кузове 8. Блок определения положения автомобиля 7 выполнен с обеспечением возможности получать сигналы от компараторов, тем самым определять расположение автомобиля по отношению к дорожной разметке.
Компараторы (первый компаратор 6, второй компаратор 9, третий компаратор 16 и четвёртый компаратор 17) расположены в кузове 8. Компараторы представляют собой устройства, которые сравнивают сигналы с датчиков, в данном случае магнитных. Первый компаратор 6 и второй компаратор 9 имеют по три входа каждый. Третий компаратор 16 и четвёртый компаратор 17 имеют по два входа каждый. Первый компаратор 6, второй компаратор 9, третий компаратор 16 и четвёртый компаратор 17 соединены своими выходами с соответствующими входами блока определения положения автомобиля 7.
Магнитные датчики (первый магнитный датчик 1, второй магнитный датчик 2, третий магнитный датчик 3, четвёртый магнитный датчик 4, пятый магнитный датчик 10, шестой магнитный датчик 12, седьмой магнитный датчик 13, восьмой магнитный датчик 14, девятый магнитный датчик 15, десятый магнитный датчик 18) могут быть закреплены на кузове 8. Магнитные датчики представляют собой датчики, определяющие напряжённость магнитного поля, например датчики Холла (см. http://femto.com.ua/articles/part_2/4476.html, дата обращения: 29.06.2015 г.) или дискретные датчики магнитного поля. Первый магнитный датчик 1, второй магнитный датчик 2 и третий магнитный датчик 3 расположены на переднем бампере 5, например, в его нижней части. Первый магнитный датчик 1 расположен между левой стороной кузова 8 и вторым магнитным датчиком 2. Второй магнитный датчик 2 расположен на продольной оси кузова 8. Третий магнитный датчик 3 расположен между вторым магнитным датчиком 2 и правой стороной кузова 8. Первый магнитный датчик 1, второй магнитный датчик 2 и третий магнитный датчик 3 соединены своими выходами с соответствующими входами первого компаратора 6. Шестой магнитный датчик 12,седьмой магнитный датчик 13 и восьмой магнитный датчик 14 расположены на заднем бампере 11, например, в его нижней части. Шестой магнитный датчик 12 расположен между правой стороной кузова 8 и седьмым магнитным датчиком 13. Седьмой магнитный датчик 13 расположен на продольной оси кузова 8. Восьмой магнитный датчик 14 расположен между седьмым магнитным датчиком 13 и левой стороной кузова 8. Шестой магнитный датчик 12, седьмой магнитный датчик 13, восьмой магнитный датчик 14 соединены своими выходами с соответствующими входами второго компаратора 9.
Также на кузове 8 или на бампере расположены четвёртый магнитный датчик 4, пятый магнитный датчик 10, девятый магнитный датчик 15 и десятый магнитный датчик 18. Четвёртый магнитный датчик 4 расположен на правой стороне кузова 8 рядом с передним бампером 5 или на переднем бампере 5 с правой его стороны. Пятый магнитный датчик 10 расположен на правой стороне кузова 8 рядом с задним бампером 11 или на заднем бампере 11 с правой его стороны. Девятый магнитный датчик 15 расположен на левой стороне кузова 8 рядом с задним бампером 11 или на заднем бампере 11 с левой его стороны. Десятый магнитный датчик 18 расположен на левой стороне кузова 8 рядом с передним бампером 5 или на переднем бампере 5 с левой его стороны.
Крепление четвёртого магнитного датчика 4, пятого магнитного датчика 10, девятого магнитного датчика 15 и десятого магнитного датчика 18 возможно на другие элементы, так чтобы данные датчики были расположены ближе к линиям горизонтальной разметки (например, согласно источнику http://www.pdd24.com/pdd/razm1, дата обращения: 02.03.2015 г.), разделяющим соседние полосы или обозначающие края проезжей части. Наиболее целесообразно располагать четвёртый магнитный датчик 4 и пятый магнитный датчик 10 правее третьего магнитного датчика 3 и шестого магнитного датчика 12, а девятый магнитный датчик 15 и десятый магнитный датчик 18 левее первого магнитного датчика 1 и восьмого магнитного датчика 14. По возможности, четвёртый магнитный датчик 4, пятый магнитный датчик 5, девятый магнитный датчик 15 и десятый магнитный датчик 18 следует располагать ближе к поверхности дороги. Таким образом, уровень сигнала будет больше, в том числе, за счёт их приближения к источнику магнитного поля.
Пятый магнитный датчик 10 и девятый магнитный датчик 15 соединены своими выходами с соответствующими входами третьего компаратора 16, а четвёртый магнитный датчик 4 и десятый магнитный датчик 18 соединены своими выходами с соответствующими входами четвёртого компаратора 17.
Осуществление изобретения
Изобретение реализуется следующим образом. Магнитные датчики (первый магнитный датчик 1, второй магнитный датчик 2, третий магнитный датчик 3, четвёртый магнитный датчик 4, пятый магнитный датчик 10, шестой магнитный датчик 12, седьмой магнитный датчик 13, восьмой магнитный датчик 14, девятый магнитный датчик 15, десятый магнитный датчик 18) закрепляют на кузове 8 и бампере, а компараторы (первый компаратор 6, второй компаратор 9, третий компаратор 16, четвёртый компаратор 17) и блок определения положения автомобиля 7 устанавливают в кузове 8 согласно указанному выше расположению элементов.
При движении автомобиля по полосе движения магнитные датчики (первый магнитный датчик 1, второй магнитный датчик 2, третий магнитный датчик 3, четвёртый магнитный датчик 4, пятый магнитный датчик 10, шестой магнитный датчик 12, седьмой магнитный датчик 13, восьмой магнитный датчик 14, девятый магнитный датчик 15, десятый магнитный датчик 18) формируют сигнал о наличии и величине магнитного поля от дорожной разметки. Дорожная разметка, в свою очередь, имеет в своём составе вещества с магнитными свойствами и остаточную намагниченность.
Компараторы (первый компаратор 6, второй компаратор 9, третий компаратор 16, четвёртый компаратор 17) сравнивают сигналы с магнитных датчиков (первого магнитного датчика 1, второго магнитного датчика 2, третьего магнитного датчика 3, четвёртого магнитного датчика 4, пятого магнитного датчика 10, шестого магнитного датчика 12, седьмого магнитного датчика 13, восьмого магнитного датчика 14, девятого магнитного датчика 15, десятого магнитного датчика 18), а блок определения положения автомобиля 7 получает сигналы от компараторов и определяет положение автомобиля на полосе движения.
А именно четвёртый компаратор 17 сравнивает сигналы с четвёртого магнитного датчика 4 и десятого магнитного датчика 18. Третий компаратор 16 сравнивает сигналы с пятого магнитного датчика 10 и девятого магнитного датчика 15. В случае равенства данных четырёх сигналов блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что автомобиль движется по центру полосы движения. Если сигнал с четвёртого магнитного датчика 4 больше сигнала с десятого магнитного датчика 18, а сигнал с пятого магнитного датчика 10 больше сигнала с девятого магнитного датчика 15, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что автомобиль находится ближе к правой стороне полосы движения. Если сигнал с десятого магнитного датчика 18 больше сигнала с четвёртого магнитного датчика 4, а сигнал с девятого магнитного датчика 15 больше сигнала с пятого магнитного датчика 10, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что автомобиль находится ближе к левой стороне полосы движения. В случае, если выявленная компараторами (первым компаратором 6, вторым компаратором 9, третьим компаратором 16, четвёртым компаратором 17) разница сигналов с магнитных датчиков (четвёртого магнитного датчика 4 и десятого магнитного датчика 18, пятого магнитного датчика 10 и девятого магнитного датчика 15) превышает допустимый уровень, то блок определения положения автомобиля 7 вырабатывает сигнал на корректировку траектории движения транспортного средства.
Первый компаратор 6 сравнивает сигналы с первого магнитного датчика 1, второго магнитного датчика 2 и третьего магнитного датчика 3. Работу устройства можно продемонстрировать на примере стрелки, знака дорожной разметки, расположенного строго по центру полосы движения. Если сигналы с первого магнитного датчика 1 и третьего магнитного датчика 3 равны между собой, а сигнал со второго магнитного датчика 2 больше сигнала с первого магнитного датчика 1 и второго магнитного датчика 2, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что автомобиль расположен по центру полосы движения. Если сигнал с третьего магнитного датчика 3 больше сигналов с первого магнитного датчика 1 и второго магнитного датчика 2, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что передняя часть автомобиля расположена левее знака дорожной разметки, расположенного строго по центру полосы движения. Если сигнал с первого магнитного датчика 1 больше сигналов со второго магнитного датчика 2 и третьего магнитного датчика 3, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что передняя часть автомобиля расположена правее знака дорожной разметки, расположенного строго по центру полосы движения. В случае поперечной дорожной разметки, например, стоп-линии сигналы с первого магнитного датчика 1, второго магнитного датчика 2 и третьего магнитного датчика 3 равны между собой.
Второй компаратор 9 сравнивает сигналы с шестого магнитного датчика 12, седьмого магнитного датчика 13 и восьмого магнитного датчика 14. Если сигналы с шестого магнитного датчика 12 и восьмого магнитного датчика 14 равны между собой, а сигнал с седьмого магнитного датчика 13 больше сигнала с шестого магнитного датчика 12 и восьмого магнитного датчика 14, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что автомобиль расположен по центру полосы движения. Если сигнал с шестого магнитного датчика 12 больше сигналов с седьмого магнитного датчика 13 и восьмого магнитного датчика 14, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что задняя часть автомобиля расположена левее знака дорожной разметки, расположенного строго по центру полосы движения, например стрелки. Если сигнал с восьмого магнитного датчика 14 больше сигналов с шестого магнитного датчика 12 и седьмого магнитного датчика 13, то блок определения положения автомобиля 7 вырабатывает сигнал, соответствующий сообщению, что задняя часть автомобиля расположена правее знака дорожной разметки, расположенного строго по центру полосы движения, например стрелки. В случае поперечной дорожной разметки, например, стоп-линии сигналы с шестого магнитного датчика 12, седьмого магнитного датчика 13 и восьмого магнитного датчика 14 должны быть равны между собой.
Таким образом, выполнение устройства описанным выше образом обеспечивает высокую точность определения расположения автомобиля на дорожной полосе. Это связано с использованием магнитных датчиков (первого магнитного датчика 1, второго магнитного датчика 2, третьего магнитного датчика 3, четвёртого магнитного датчика 4, пятого магнитного датчика 10, шестого магнитного датчика 12, седьмого магнитного датчика 13, восьмого магнитного датчика 14, девятого магнитного датчика 15, десятого магнитного датчика 18), которые позволяют различать не только продольную дорожную разметку, но и поперечную дорожную разметку, а также знаки дорожной разметки, расположенные строго по центру дорожной полосы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕПРАВОМЕРНЫХ ДЕЙСТВИЙ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2613918C2 |
| Устройство для регулирования формы полосы в процессе непрерывной прокатки | 1990 |
|
SU1729644A1 |
| Устройство для определения времени начала технического обслуживания изделия | 1991 |
|
SU1800469A1 |
| Устройство для магнитной записи и воспроизведения цифровой информации | 1986 |
|
SU1374275A1 |
| Устройство для регулирования силовых параметров и рабочей подачи процесса резания | 1985 |
|
SU1270744A1 |
| Горизонтальная дорожная разметка (варианты) | 2016 |
|
RU2642746C1 |
| ТОКОВЫЙ ПОРОГОВЫЙ ЭЛЕМЕНТ ЛЕВОГО ЦИКЛИЧЕСКОГО СДВИГА | 2021 |
|
RU2776031C1 |
| Устройство для управления приводом манипулятора | 1990 |
|
SU1821356A1 |
| Устройство нанесения микростеклошариков | 2018 |
|
RU2683431C1 |
| Яхтенный авторулевой | 1981 |
|
SU1020311A1 |
Заявленное изобретение относится к технике управления транспортным средством. Предложена система определения положения автомобиля на проезжей части. Система содержит восемь магнитных датчиков, расположенных на транспортном средстве. Датчики через компараторы соединены с блоком определения положения автомобиля. При движении автомобиля по полосе движения магнитные датчики формируют сигнал о наличии и величине магнитного поля от дорожной разметки. Дорожная разметка, в свою очередь, имеет в своём составе вещества с магнитными свойствами и остаточную намагниченность. Достигается увеличение точности определения расположения автомобиля на дороге, возможность определять положение задней части автомобиля, а также различать знаки дорожной разметки. 1 ил.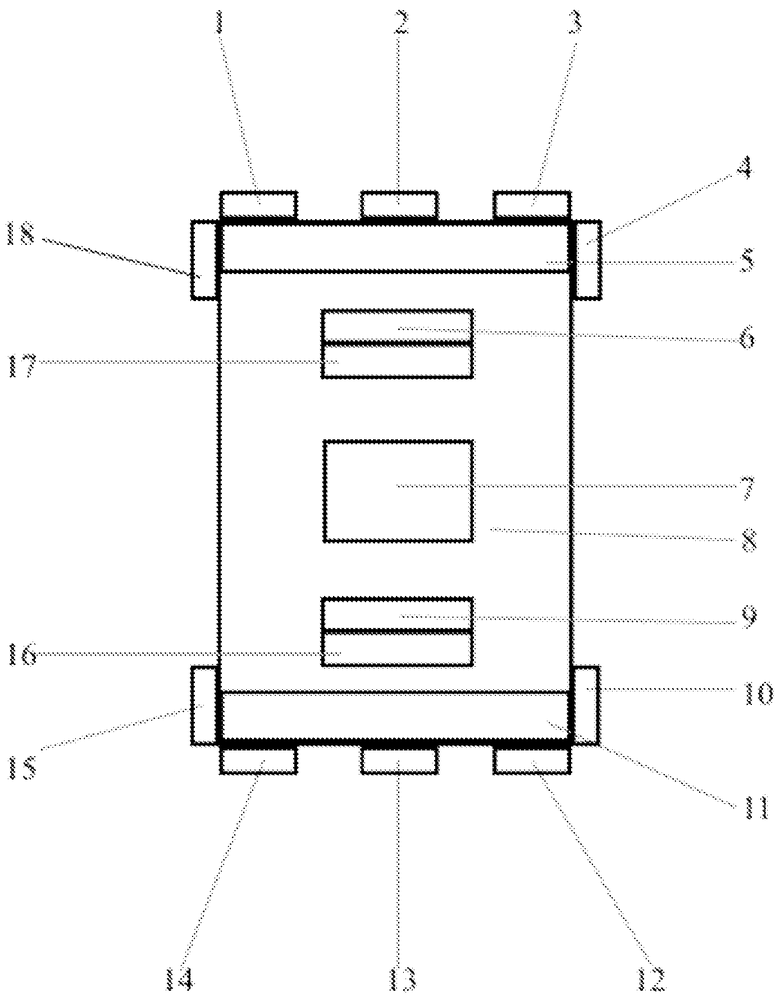
Система определения положения автомобиля на проезжей части, содержащая первый магнитный датчик, второй магнитный датчик, третий магнитный датчик, четвёртый магнитный датчик, пятый магнитный датчик, шестой магнитный датчик и десятый магнитный датчик, первый магнитный датчик, второй магнитный датчик, третий магнитный датчик, четвёртый магнитный датчик и десятый магнитный датчик прикреплены к кузову автомобиля в его передней части, а также блок определения положения автомобиля, причём второй магнитный датчик установлен на оси автомобиля, первый магнитный датчик установлен левее его по ходу движения вперёд, третий магнитный датчик установлен правее его по ходу движения вперёд, четвёртый магнитный датчик установлен правее третьего магнитного датчика по ходу движения вперёд, десятый магнитный датчик установлен левее первого магнитного датчика по ходу движения вперёд, отличающаяся тем, что в неё введены седьмой магнитный датчик, восьмой магнитный датчик, девятый магнитный датчик, прикреплённые к кузову автомобиля в его задней части, а также первый компаратор, второй компаратор, третий компаратор, четвёртый компаратор, причём седьмой магнитный датчик установлен на оси автомобиля, восьмой магнитный датчик установлен левее его по ходу движения вперёд, шестой магнитный датчик установлен правее его по ходу движения вперёд, девятый магнитный датчик установлен левее восьмого магнитного датчика по ходу движения вперёд, пятый магнитный датчик установлен правее шестого магнитного датчика по ходу движения вперёд, первый магнитный датчик, второй магнитный датчик и третий магнитный датчик соединены своими выходами с соответствующими входами первого компаратора, шестой магнитный датчик, седьмой магнитный датчик, восьмой магнитный датчик соединены своими выходами с соответствующими входами второго компаратора, пятый магнитный датчик и девятый магнитный датчик соединены своими выходами с соответствующими входами третьего компаратора, а четвёртый магнитный датчик и десятый магнитный датчик соединены своими выходами с соответствующими входами четвёртого компаратора, при этом первый компаратор, второй компаратор, третий компаратор и четвёртый компаратор соединены своими выходами с соответствующими входами блока определения положения автомобиля.
| СПОСОБ КОНТРОЛЯ ПЕРЕСЕЧЕНИЯ ОГРАНИЧИТЕЛЬНЫХ ЛИНИЙ АВТОДРОМА | 2013 |
|
RU2533643C1 |
| СПОСОБ КОНТРОЛЯ ВОЖДЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2308094C1 |
| JP 4765844 B2, 07.09.2011. | |||

