Способ лечения перинатального поражения центральной нервной системы и детского церебрального паралича у детей до 3-х лет.
Изобретение относится к области медицины и может быть использовано для создания самостоятельных двигательных функций и их совершенствования на этапах от неподвижности до этапа ходьбы у младенцев в возрасте до трех лет.
Известно изобретение по заявке РФ №2007111101/14 от 26.03.2007 «Способ лечения синдрома двигательных расстройств у детей».
Физическое воздействие разделено на 7 этапов.
Начальный этап воздействия определяют по двигательному возрасту ребенка, зависящему от его двигательных навыков. На первом этапе стимулируют развитие защитного рефлекса, лабиринтного установочного рефлекса путем выполнения классического и точечного массажа мышц разгибателей шеи и спины, ношения ребенка на предплечье в положении на животе с фиксацией за бедро, пассивных переворотов за руки и за ноги со спины на живот и обратно, тракции за верхнюю руку с небольшим отрывом от поверхности в положении ребенка лежа на боку, тракции за руки ребенка, лежащего под углом 5 градусов с отрывом головы от поверхности. На втором этапе все управления выполняют в положении на животе с клином или валиком под грудью, при этом проводят поочередный массаж рук, пассивный выносом рук вперед, разведение в стороны, отведение вверх с удержанием поднятой головы. На третьем этапе обучают ребенка переворотам со спины на живот и ползанию по-пластунски. На четвертом этапе обучают сидению с ногами вперед, подъему и стоянию на четвереньках. На пятом этапе обучают ползанию на четвереньках. На шестом этапе обучают ребенка подъему на ноги у опоры. На седьмом этапе обучают навыкам ходьбы.
Сокращения, принятые по тексту описания:
ЦНС - центральная нервная система;
ППНС - перинатальное поражение центральной нервной системы;
ДЦП - детский церебральный паралич;
Р – ребенок;
ПВСВ - прямой вектор силового воздействия;
ЗВСВ - знакопеременный вектор силового воздействия;
НМП - нейромышечная память;
МД - модель движения;
ИП - исходное положение;
ГМ - группа мышц;
АШТР - асимметричный шейно-тонический рефлекс;
СШТР - симметричный шейно-тонический рефлекс;
ЛУР - лабиринтный установочный рефлекс;
ЛТР - лабиринтный тонический рефлекс;
СШЦУР - симметричный шейный цепной установочный рефлекс;
АШЦУР - асимметричный шейный цепной установочный рефлекс.
Однако данный патент имеет существенные недостатки: он недостаточно эффективен при коррекции широкого диапазона аномальных двигательных функций младенцев с ППНС и ДЦП.
Для лечебного воздействия автором принято во внимание только два рефлекса: защитный и лабиринтно-установочный. Однако двигательных рефлексов гораздо больше.
К ним относятся следующие.
1. Двигательные автоматизмы сегментарного уровня: защитный рефлекс, рефлекс опоры и автоматической ходьбы, рефлекс ползания, хватательный рефлекс и рефлекс Моро.
2. Надсегментарные позотонические автоматизмы: рефлексы с головы на туловище и с таза на туловище, асимметричный шейно-тонический рефлекс, симметричный шейно-тонический рефлекс, лабиринтный тонический рефлекс.
3. Постуральные и установочные рефлексы: ЛУР, СШЦУР, АШЦУР, рефлексы с головы на туловище, выпрямляющий рефлекс с тела на тело и с тела на голову; реакция равновесия, оптическая реакция опоры.
В патенте высказано мнение, что коррекция других врожденных рефлексов не целесообразна и не эффективна. Этот тезис неточен и недостаточен для достижения оптимальных результатов лечения поражений дисфункции головного мозга Р.
Гениальная природа в ходе многомиллионной эволюции ничего лишнего не создавала. Все неэффективное, ненужное не передавалось по наследству. Двигательные автоматизмы сегментарного уровня абсолютно необходимы для младенца, иначе бы они не возникли.
Особенность проблемы заключается в том, что результат лечения зависит от тяжести поражения ЦНС: наличия или отсутствия врожденных и/или надсегментарных рефлексов и их сочетания между собой.
Для достижения оптимальности лечения следует учитывать необходимость коррекции всех имеющихся рефлексов, их сочетаний и негативных проявлений. Врожденные двигательные рефлексы необходимо коррегировать, преобразуя их в посторальные и установочные, а надсегментарные подавлять и устранять.
Если этого не сделать, то надсегментарные рефлексы перейдут патологические тонические рефлексы и резко возрастет вероятность их перехода в ДЦП. Тонические рефлексы создают условия для формирования патологических поз, контрактур и деформаций. Патологические рефлекторные движения, многократно повторяясь, негативно влияют на создание новых двигательных навыков. При ДЦП развитие Р может остановиться и уровень двигательного развития больного ребенка одного года или даже 5-ти лет может соответствовать уровню двухмесячного здорового ребенка. Поэтому физическое лечебное воздействие следует начинать как можно раньше.
Однако прототип обладает существенными недостатками: он не позволяет существенно улучшить двигательные функции и одновременно расширить диапазон самостоятельно выполняемых движений, создать нейромышечную память динамической последовательности модели плавных переходов жизненно необходимых движений и одновременно сократить сроки лечения.
Технический результат: улучшение двигательных функций при одновременном расширении диапазона самостоятельно выполняемых движений, создание НМЛ последовательности моделей плавных переходов жизненно необходимых движений при одновременном сокращении сроков реабилитации.
Технический результат достигается тем, что в способе лечения перинатального поражения центральной нервной системы и детского церебрального паралича у детей в возрасте до 3-х лет, заключающемся в физическом воздействии на ребенка (Р), создают нейромышечную динамическую память (НМП) моделей движения Р:
воздействуют на центр каждой ладонной поверхности Р перпендикулярно ей с последующим спиральным массажем от центра каждой ладони Р против часовой стрелки, далее воздействуют на центр каждой подошвенной поверхности Р, перпендикулярно ей, с последующим спиральным массажем от центра к периферии подошвы, против часовой стрелки;
далее формируют НМП модели поднятия головы: исходное положение (ИЛ) Р лежа на животе, лицом вниз, ноги согнуты в коленях, параллельны, руки согнуты в локтях, Р поднимают за плечи, образуя тупой угол между его туловищем и ногами, фиксируют в этом положении;
формируют НМП модели удержания головы: ИЛ - Р на коленях, его удерживают в области локтей за предплечья и совершают возвратно-колебательные движения в вертикальной плоскости поперек продольной оси симметрии тела, плавно меняя угол наклона;
а также для формирования данной модели: ИП - Р лежит на спине, сгибают его ноги в коленях, фиксируя стопы на плоскости, подтягивая Р за руки, и держат за них таким образом, чтобы угол между туловищем и горизонтальной поверхностью был острым, совершают колебательные движения в вертикальной плоскости, поперек продольной оси симметрии тела, одновременно доводя угол между туловищем и горизонтальной поверхностью до прямого угла и возвращая туловище Р обратно до острого угла, плавно изменяя угол наклона;
затем формируют НМП модели поворота головы: ИП - Р лежит на спине, его удерживают за ноги и поворачивают туловище вокруг продольной оси симметрии тела, для чего вначале поворачивают ноги направо, затем влево, фиксируя крайние положения;
затем формируют НМП модели поднятия головы в положении на четвереньках: ИП - Р устанавливают на четвереньки, голова опущена, приподнимают голову Р серией последовательных движений;
далее формируют НМП модели удержания равновесия: из положения Р стоя на четвереньках отводят его бедра назад, создают тупой угол между туловищем и бедрами, совершают колебательные движения в вертикальной плоскости;
формируют НМП модели установления Р в положение на четвереньках: ИП - Р укладывают на живот, подтягивая ноги, сгибая в коленях под живот, руки Р располагают параллельно, сгибая в локтях, поднимают таз Р и выпрямляют бедра так, чтобы угол между бедром и голенью был прямым, далее выпрямляют руки Р, устанавливая его в положение на четвереньках так, чтобы образовать прямые углы между руками и туловищем, туловищем и бедрами;
формируют НМП модели удерживания равновесия в положении на четвереньках: из положения стоя на четвереньках Р сажают в сторону на бедро, не отрывая от поверхности его руку со стороны присаживания; отводят вторую руку в сторону до образования развернутого угла между руками, совершают колебательные движения поперек продольной оси симметрии тела, изменяя угол наклона туловища относительно поверхности, фиксируя максимальную амплитуду совершаемых движений;
а также для формирования данной модели: из ИП Р стоя на четвереньках, удерживая его за предплечья, производят колебательные движения вдоль продольной оси симметрии тела, затем - поперек этой оси, затем меняют место удержания Р с предплечья на область таза и повторяют упомянутые колебательные движения;
далее формируют НМП модели равновесия в положении на четвереньках: Р устанавливают в положение опоры на коленях с согнутыми под грудью руками, расположенными параллельно, поддерживают туловище Р в области таза, опускают его таз, затем поднимают его плечи, не отрывая его кистей от поверхности, приподнимают таз, образуя прямые углы между руками и туловищем, туловищем и бедрами, повторяют вышеуказанные колебательные движения;
формируют НМП модели движения на четвереньках: из положения Р стоя на четвереньках осуществляют последовательное передвижение его рук и ног, для чего наклоняют туловище Р вправо, вперед к голове, передвигают левую руку вперед, далее наклоняют туловище влево, вперед к голове, передвигают правую руку вперед, устанавливая ее на одном уровне с левой; далее наклоняют туловище Р вправо, вперед к голове, переставляют левую ногу вперед, затем наклоняют туловище влево, вперед к голове, переставляют правую ногу вперед и устанавливают ее на одном уровне с левой ногой;
а также для формирования этой модели из положения Р стоя на четвереньках осуществляют следующие последовательные передвижения его ног и рук вперед: наклоняют туловище влево, вперед к голове и переставляют правую руку, наклоняют туловище Р вправо, вперед к голове и переставляют последовательно левую ногу и затем левую руку далее положения правой руки, наклоняют туловище Р влево, вперед, переставляют последовательно вперед правую ногу и затем правую руку вперед;
затем формируют НМП модели ползания на четвереньках: предъявляют Р блестящий тест-объект, перемещая его вперед в зоне видимости для Р, стимулируя Р к попыткам поймать тест-объект;
формируют НМП модели присаживания: ИП - Р на четвереньках, опускают его плечи и одновременно поворачивают Р вокруг продольной оси симметрии его тела, сажают Р на горизонтальную поверхность с опорой на руки;
формирую НМП модели координации положения головы: Р предъявляют зрительный тест-объект, стимулируя Р фиксировать на нем взгляд при перемещениях тест-объекта вертикально и/или горизонтально с фиксацией в крайних положениях, а также при перемещениях тест-объекта в виде горизонтальной восьмерки;
формируют НМП модели стояния на двух ногах: ИП - Р присаживают на двух ногах, устанавливая его ноги параллельно, колени согнуты, удерживают Р за грудь под острым углом к поверхности, затем устанавливают Р вертикально, удерживая его в этом положении, затем создают колебательные движения Р в двух взаимно перпендикулярных плоскостях, проходящих через продольную ось симметрии тела Р: со спины к передней поверхности тела и затем перпендикулярно этой плоскости;
далее формируют НМП модели равновесия и ходьбы: ИП - Р стоя на двух ногах, удерживают его туловище за плечи и наклоняют вперед под углом 5-10 град. от вертикали, переставляют вперед одну ногу Р, далее возвращают Р в вертикальное положение, далее повторяют эти движения для второй ноги, затем переставляют ноги Р поочередно вперед, поддерживая его вертикальное равновесие после каждого шага;
ритм воздействия постепенно увеличивают, достигая максимума к середине цикла выполнения каждого движения и постепенно уменьшая к его концу;
воздействие осуществляют 1-2 раза в день.
Предложенную систему физического воздействия осуществляют 1-2 раза в день до достижения необходимого запланированного результата.
Совокупность отличительных признаков изобретения является необходимой и достаточной для достижения заявленного технического результата.
Изобретение поясняется чертежами (фиг. 1-21).
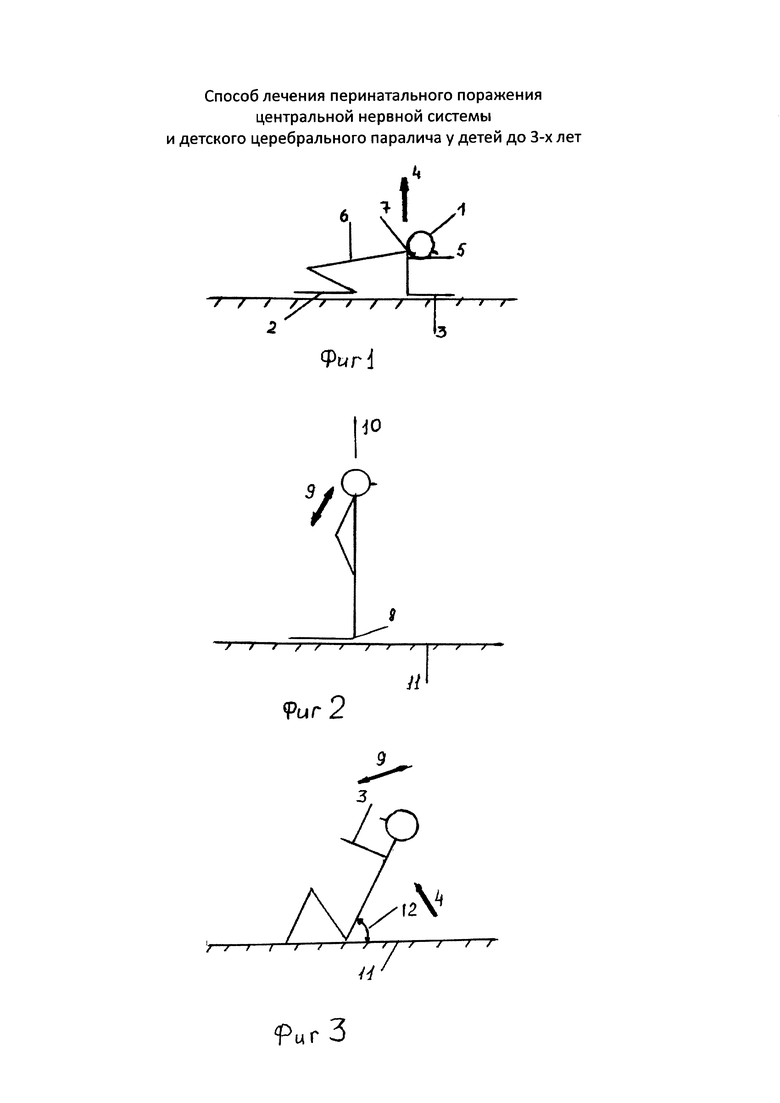
Фиг. 1 - МД поднятия головы.
Фиг. 2, 3 - МД удержания головы.
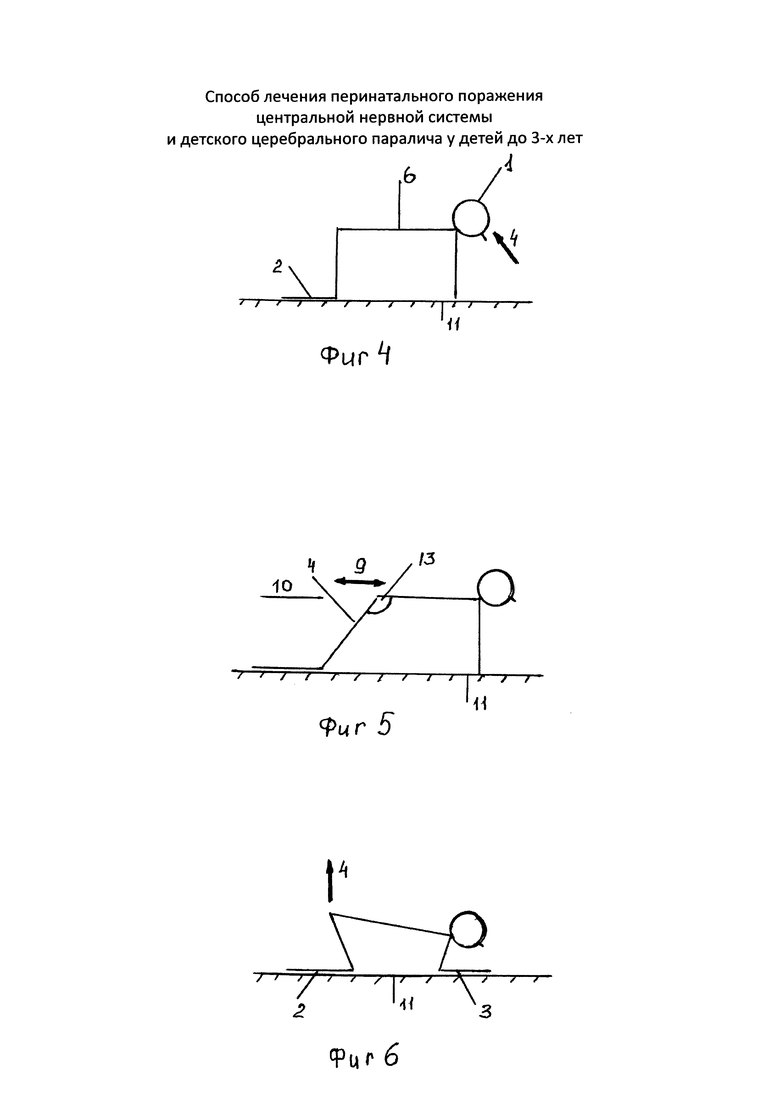
Фиг. 4 - МД поднятия головы на четвереньках.
Фиг. 5 - МД удержания равновесия на четвереньках.
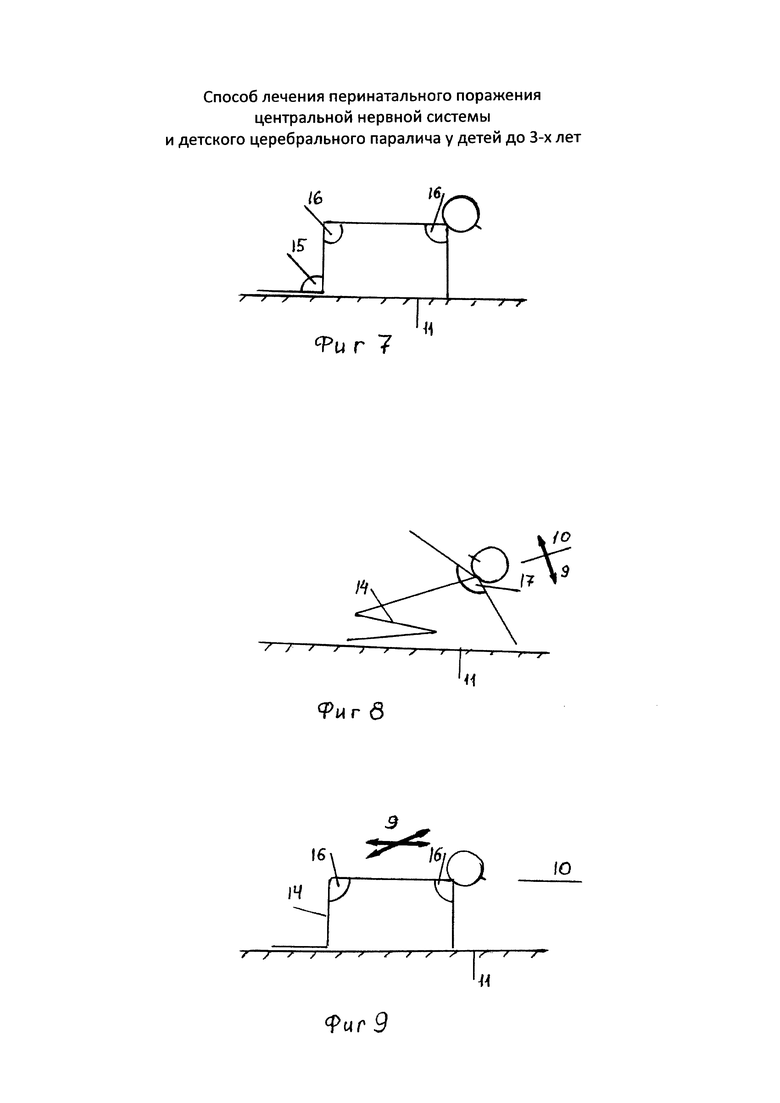
Фиг. 6, 7 - МД установления на четвереньки.
Фиг. 8 - МД удержание равновесия на четвереньках.
Фиг. 9, 10 - МД удержания равновесия на четвереньках.
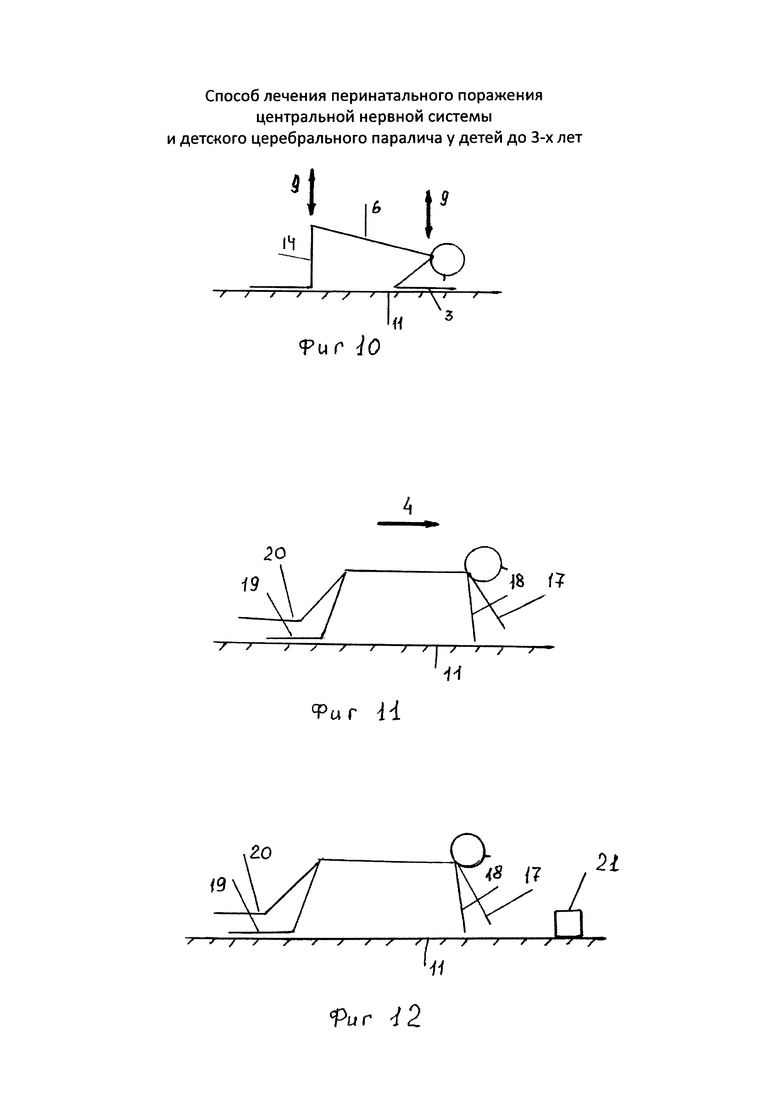
Фиг. 11 - МД движения на четвереньках.
Фиг. 12 - МД ускоренного ползания.
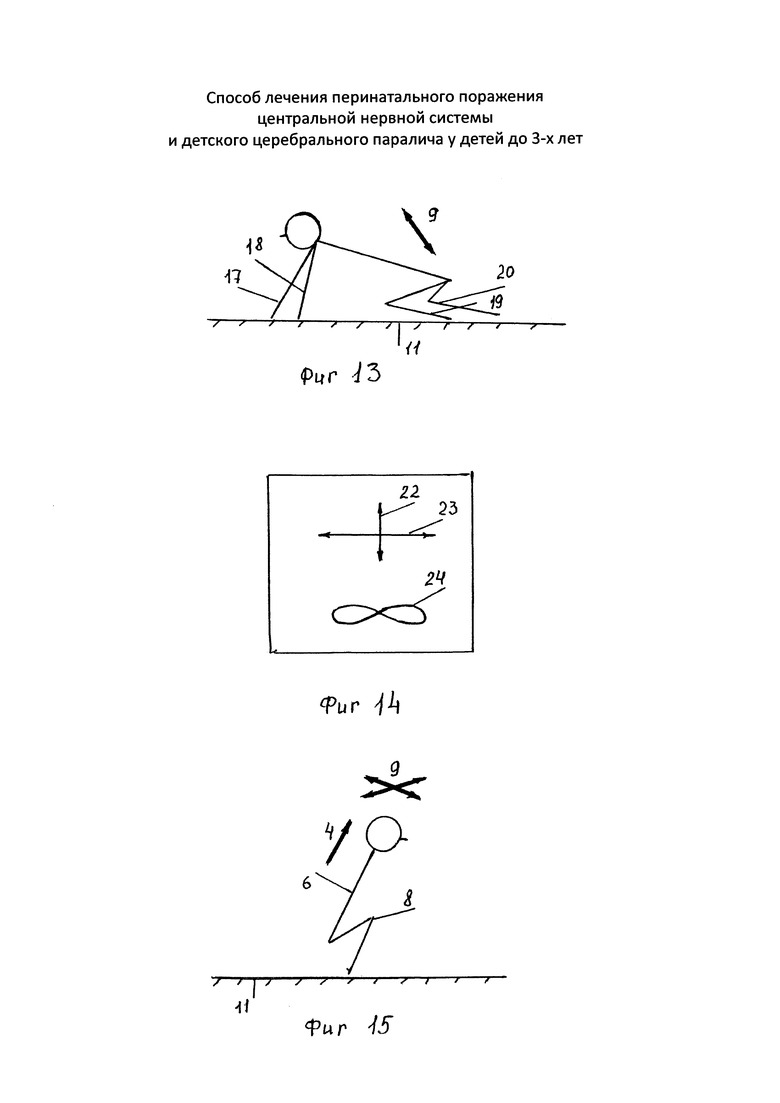
Фиг. 13 - МД присаживания.
Фиг. 14 - МД координации положения головы.
Фиг. 15 - МД стояние на двух ногах.
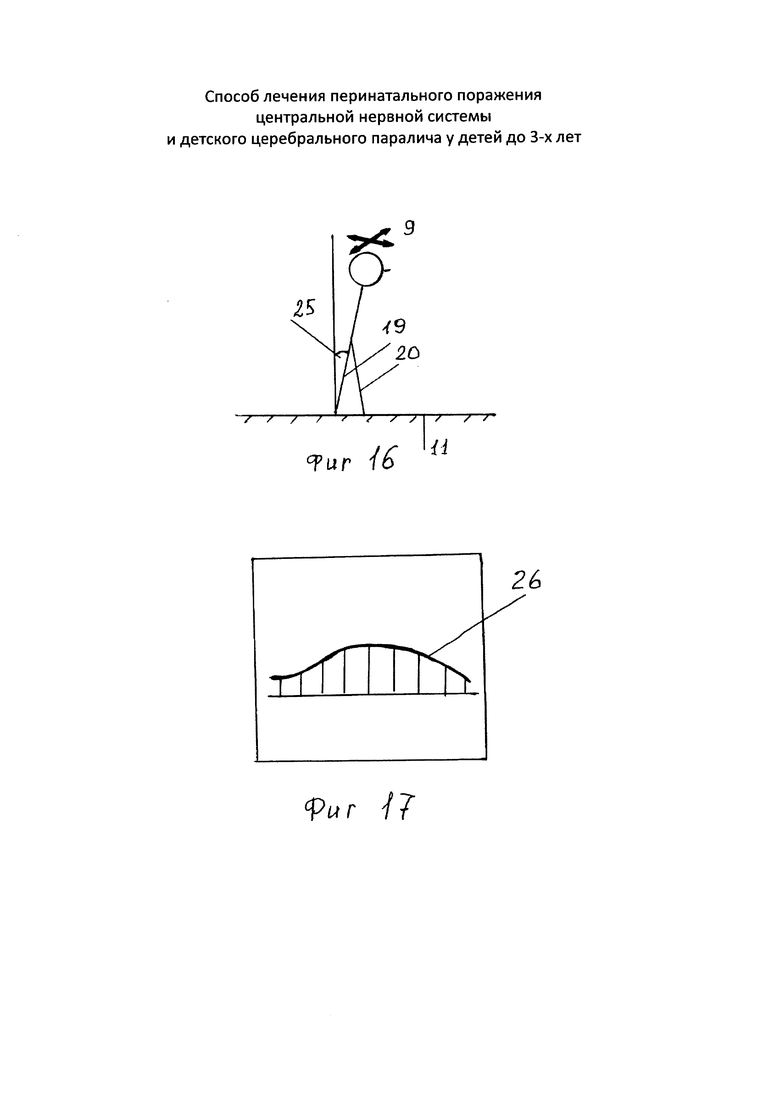
Фиг. 16 - МД равновесия и ходьбы.
Фиг. 17 - схема ритма физического воздействия.
На чертежах обозначены: 1 - голова, 2 - ноги, 3 - руки, 4 - ПВСВ, 5 - плечи, 6 - туловище, 7 - шея, 8 - колени, 9 - ЗВСВ, 10 - продольная ось симметрии тела, 11 - горизонтальная поверхность, 12 - угол между туловищем и поверхностью, 13 - угол между туловищем и бедрами, 14 - бедро, 15 - угол между бедрами и голенью, 16 - углы между руками и туловищем, туловищем и бедрами, 17 - левая рука, 18 - правая рука, 19 - правая нога, 20 - левая нога, 21 – тест-объект, 22 - вертикальное перемещение зрительного тест-объекта, 23 - горизонтальное перемещение зрительного тест-объекта, 24 - горизонтальная восьмерка, 25 - угол наклона, 26 - амплитуда ритма физического воздействия.
На протяжении всей жизни Р, нейроны головного мозга, проводящие электрические сигналы, образуют новые взаимосвязи. Эти новые межнейронные связи возникают в ответ на запрос (стимул). Благодаря этим новым взаимосвязям можно инициировать новые функции головного мозга или усовершенствовать уже имеющиеся. Последовательность нейроимпульсов создает в головном мозге нейромышечную память.
На практике эти стимулы реализуются в виде моделей движения. Модель движения, проходя через руки врача в тело Р, преобразуется в стереотип движения. Формировать следует только модели жизненно необходимых движений. Под ними следует понимать модели движений, необходимых и достаточных для осуществления элементарных двигательных функций. Следует особо отметить необходимость создания нейромышечной памяти последовательности плавного преобразования жизненно необходимых движений друг в друга.
За двигательные функции в головном мозге отвечает мозжечок, являющийся частью заднего мозга. Его основная функция - координация всех движений, связанных с мышечной активностью, равновесием и балансом. Мозжечок также ответственен за реакции самосохранения и процесс обучения. Передавая новые стимулы в виде моделей движений, мы непосредственно влияем на создание самих движений. Нейромышечная память динамической последовательности моделей движений станет фундаментом для выполнения самостоятельных движений.
Активное физическое воздействие производится при помощи двух типов векторов силы. Прямой вектор силового воздействия (ПВСВ) характеризует прямолинейное направление вектора силы, используется для предания телу Р прямолинейного движения. Врач воздействует на Р, передавая кинетическую энергию своих рук, активизируя жизненные процессы в группах мышц.
Схема физического воздействия в ортогенезе движений Р должна повторять этапы движений в филогенезе. Необходимо соблюдать естественный природный порядок последовательности развития двигательных навыков, уже опробованных природой. Логика дальнейшего совершенствования защитного рефлекса Р приводит в первую очередь к двигательному контролю положения головы (поднятие и удержание).
Формируют НМП модели движения поднятия головы 1: ИП лежа на животе (фиг. 1), лицом вниз, ноги 2 согнуты в коленях параллельно, руки 3 согнуты в локтях, направляют ПВСВ 4 вверх, поднимая Р за плечи 5, образуя тупой угол между туловищем 6 и ногами, фиксируют в этом положении, затем воздействие прекращают, осуществляя воздействие на ГМ шеи 7 и плечевого пояса.
Формируют НМП модели движения удержания головы; ИП стоя на коленях 8, Р удерживают в области локтей за предплечья, направляют ЗВСВ 9 (фиг. 2) поперек, совершая возвратно-колебательные движения в вертикальной плоскости, проходящей поперек оси 10 вертикальной симметрии туловища, плавно меняя угол наклона, воздействуют на ГМ шеи, плечевого пояса, спины.
Формируют НМП моделей движения удержания головы; ИП - Р (фиг. 3) лежит на спине, сгибают ноги в коленях, фиксируя стопы на плоскости 11, подтягивают Р за руки и держат за них, направляют ПВСВ 4 вверх так, чтобы угол между туловищем 6 и горизонтальной поверхностью 11 был острым, совершают ЗВСВ 9 - колебательные движения в вертикальной плоскости, поперек продольной оси симметрии тела, одновременно доводя угол 12 между туловищем и поверхностью до прямого угла и возвращая туловище Р обратно до острого угла, плавно изменяя угол наклона, воздействуя на все группы мышц.
Формируют НМП моделей движения поворота головы; ИП - Р лежит на спине, удерживают за ноги и поворачивают туловище 6 вокруг продольной оси 10 симметрии тела, первоначально поворачивают ноги вправо, затем влево, фиксируя крайние положения.
Дальнейшее развитие двигательных функций требует совершенствовать работу головного мозга. Необходимо стимулировать развитие мозжечка. Р необходимо перевести в состояние вынужденной неустойчивости (ввиду физической слабости рук и ног), поместив его в положение «опора на четвереньках», это состояние для Р является сверхнагрузкой, а его преодоление является сверхзадачей. Неустойчивость является новым стимулом (запросом окружающей среды). Этот запрос среды Р, хочет или не хочет, будет вынужден преодолевать, это приведет к координации, развитию равновесия и, следовательно, развитию двигательных функций.
Формируют НМП моделей движения поднятия головы на четвереньках: ИП - установлен на четвереньки, голова опущена, направляют вектор ПВСВ (фиг. 4) вверх, приподнимая голову Р серией последовательных движений в области лба, воздействуя на мышцы шеи и плечевого пояса.
Формируют НМП моделей движения удержания равновесия: из положения стоя на четвереньках (фиг. 5) отводят бедра 14 Р назад, создают тупой угол 13 между туловищем и бедрами; направляют ЗВСВ 9 вперед вдоль продольной оси 10 позвоночника, совершают колебательные движения в вертикальной плоскости, воздействуя на группы мышц спины, плечевого пояса и рук.
Формируют НМП моделей движения установления на четвереньки; ИП - Р укладывают на живот, подтягивают ноги, сгибая в коленях под живот, руки располагают параллельно, сгибая в локтях, направляют ПВСВ 4 вверх, поднимают таз, далее меняют направление ПВСВ 4 (фиг. 6-7), направляя его вперед к голове, выпрямляют бедра так, чтобы угол 15 между бедром и голенью был прямым; выпрямляют руки, устанавливая его на четвереньки, образуя прямые углы 16 между руками, туловищем и бедрами, воздействуя на группы мышц.
Формируют НМП моделей движения удержания равновесия на четвереньках: из положения стоя на четвереньках сажают Р в сторону на бедро 14, не отрывая руку со стороны присаживания от поверхности 11; отводят вторую руку в сторону до образования развернутого угла между руками (фиг. 8), направляют вектор ЗВСВ 9 в вертикальной плоскости под острым углом, совершая колебательные движения поперек продольной оси тела, изменяя угол наклона туловища относительности поверхности 11, фиксируя максимальную амплитуду совершаемых движений, одновременно воздействуя на мышцы спины, рук и плечевого пояса.
Формируют НМП моделей удержания равновесия на четвереньках: из положения стоя на четвереньках направляют ЗВСВ 9 вдоль продольной оси 10 симметрии тела, совпадающей с продольной осью позвоночника (фиг. 9), производят колебательные движения, затем меняют направление ЗВСВ, направляя его поперек оси симметрии тела, и совершают колебательные движения, затем меняют место удержания Р с предплечья на область таза и повторяют выше указанные колебательные движения, воздействуя на все группы мышц.
Формируют НМП моделей равновесия на четвереньках: Р устанавливают в положение опоры на коленях, руки согнуты под грудью параллельно (фиг. 10), поддерживают туловище Р в области таза, направляют ЗВСВ 9 вниз, опускают таз; затем направляют ЗВСВ 9 вверх, поднимая плечи, не отрывая кистей рук от поверхности 11, приподнимают таз, образуя прямые углы, между руками и туловищем, туловищем и бедрами, повторяют указанные движения, воздействуя на группы мышц всего тела;
Следующий этап развития двигательной активности в ортогенезе, должен соответствовать этапу ползания рептилий в филогенезе. Отсюда вытекает необходимость развития двигательного автоматизма сегментарного уровня - рефлекса ползания. Уровень развития мозга Р должен быть поднят врачом до необходимого уровня, позволяющего осуществлять самостоятельное ползание. Для достижения этого необходимо выполнить следующее.
Формируют НМП моделей движения на четвереньках: из положения стоя на четвереньках, сохраняя прямые углы между руками и туловищем (фиг. 11), бедрами и туловищем, осуществляют последовательное передвижение рук и ног; наклоняют туловище Р вправо, вектор ПВСВ 4 направляют вперед к голове, передвигают левую руку 17 вперед; далее наклоняют туловище 6 влево, направляют ПВСВ 4 вперед к голове, передвигают правую руку 18 вперед, устанавливая ее на одном уровне с левой; далее наклоняют туловище Р вправо, вектор ПВСВ 4 вперед к голове, переставляют левую ногу 20 вперед; затем наклоняют туловище влево, направляют вектор ПВСВ 4 вперед к голове, переставляют правую ногу 19 вперед и устанавливают ее на одном уровне с левой ногой, одновременно воздействуя на все группы мышц.
Формируют НМП моделей движения на четвереньках: из положения стоя на четвереньках (фиг. 11), сохраняя прямые углы между руками и туловищем, бедрами и туловищем, осуществляют последовательные передвижения ног и рук вперед; наклоняют туловище 6 влево, направляют ПВСВ 4 вперед к голове и переставляют правую руку 18; наклоняют туловище Р вправо, направляют вектор ПВСВ 4 вперед к голове и переставляют последовательно левую ногу 20 и затем левую руку 17 далее положения правой руки; наклоняют туловище Р влево, направляют ПВСВ вперед, переставляют последовательно вперед правую ногу 19 и затем правую руку 18 вперед, одновременно воздействуя на все группы мышц.
Формируют НМП моделей ускоренного ползания на четвереньках: Р предъявляют блестящий тест-объект 21 или шар (фиг. 12), перемещают его вперед в зоне видимости Р, стимулируя его движения за ним.
Формируют НМП моделей движений присаживания: ИП на четвереньках, далее направляют ЗВСВ 9 вниз под углом и одновременно поворачивают Р вокруг продольной оси симметрии тела, сажают Р на горизонтальную поверхность 11 с опорой на руки, воздействуя ну группы мышц спины, плечевого пояса и рук (фиг. 13).
Формируют НМП моделей координации положения головы путем фиксации координации зрительных анализаторов: Р предъявляют зрительный тест-объект (фиг. 14), фиксируют на нем взгляд Р, перемещают его вертикально 22 и/или горизонтально 23, (для тренировки вертикальных и горизонтальных мышц глаза), фиксируя его в крайних положениях; затем описывают тест-объектом, фигуры в виде горизонтальной восьмерки 24 (для тренировки косых мышц глаза), воздействуя на горизонтальные, вертикальные и косые мышцы глаза.
Глазодвигательная гимнастика тесно связана с работой вестибулярной системы Р, приводит к улучшению ориентации и координации положения головы и всего тела в пространстве.
Следующим этапом развития двигательных функция явился этап стояния на двух ногах. В нашем случае, осложненном ППНС и ДЦП, этот этап особенно важен, является определяющим для жизнедеятельности человека.
Устанавливают Р в позицию неустойчивого равновесия на двух ногах (аналогично ранее описанному состоянию неустойчивого равновесия на четвереньках).
Формируют НМП моделей движения стояния на двух ногах: ИП - Р (фиг. 15) присаживают на двух ногах, устанавливая ноги параллельно, колени 8 согнуты, направляют ПВСВ 4 вверх под острым углом, удерживают Р за грудь, далее устанавливают Р вертикально, удерживают его в этом положении; далее направляют ЗВСВ 9 в вертикальную плоскость, создавая колебательные движения в двух взаимно перпендикулярных плоскостях, проходящих через продольную ось симметрии тела 10, со спины к передней поверхности тела и затем последовательно перпендикулярно, воздействуя на все группы мышц.
Формируют НМП моделей движения равновесия и ходьбы: ИП стоя на двух ногах, удерживают туловище Р за плечи, наклоняют вперед под углом 25 на 5-10 градусов от вертикали (фиг. 16); направляют ПВСВ 4 вперед, переставляют вперед одну ногу 20, далее с помощью ЗВСВ 9 возвращают Р в вертикальное положение, далее повторяют эти движения для второй ноги 19; затем переставляют ноги поочередно вперед, поддерживая вертикальное равновесие после каждого шага, воздействуя на все группы мышц.
В природе ритмика процессов является первоначальным и решающим фактором начала и реализации самого процесса. В нашем случае ритм физического воздействия также является основополагающим, так как связан с процессом передачи кинетической энергии и нейромышечных импульсов от врача к Р. Ритм физического воздействия 26 усиливается и достигает максимума к середине цикла и постепенно уменьшается к концу цикла каждого движения (фиг. 17).
Предложенная система физического воздействия осуществляется 1-2 раза в день.
Предложенный способ характеризуется следующими клиническими примерами.
Пример 1. Пациент К., возраст - 15 месяцев. Первоначально: защитный рефлекс слабо выражен и сочетается с отсутствием рефлексов опоры, ползания, автоматической ходьбы; хватательный рефлекс обоих рук затруднен, мышечный тонус гипотоничен.
Самостоятельно не садится, при пассивном сидении спина круглая, не встает на четвереньки, не ползает, не встает на ноги, плохая опора ног и рук, не ходит, короткое время удержание головы вертикально.
Диагноз: Синдром угнетенного состояния ЦНС, сочетанный с гипоксическим ишемическим поражением головного мозга и тоническим астатическим синдромом. Надсегментарные позотонические автоматизмы не выражены. Пациенту предложено лечение согласно изобретению.
Результат: Все отставания врожденных рефлексов преодолены.
Постуральные и установочные рефлексы в норме: ЛУР, СШЦУР, АШЦУР, рефлекс головы на туловище, выпрямляющий рефлекс с тела на тело и с тела на голову; реакции равновесия, оптическая реакция опоры в норме. Создан мышечный корсет, мышечный тонус значительно улучшился. Создана опора рук и ног для удержания тела в пространстве. Самостоятельно встает и ползает на четвереньках, встает на ноги и выполняет медленные и самостоятельные шаги, голову держит вертикально, улучшилась координация движений. Психоэмоциональное состояние значительно улучшилось, фиксирует взгляд при переводе тест-объекта справа налево и сверху и вниз. Расширился диапазон кинетических движений, повысилась скорость реакции на предъявляемые стимулы.
Время лечения по данной методике - 4 месяца.
Пример 2. Пациент З., возраст - 9 месяцев. Первоначально: ППНС характеризуется следующим состоянием врожденных рефлексов: защитный рефлекс слабо выражен и сочетается с отсутствием рефлексов опоры, ползания, автоматической ходьбы и рефлекса Моро. Не сидит, не встает, не ползает, гипертонус мышц спины, не встает на ноги, не ходит. Голова наклонена вправо, повышен мышечный тонус правой руки и правой ноги, правая рука в пронатарной установке, кулачок зажат, опорная нога левая, правая нога полностью не разгибается в коленом суставе.
Диагноз: Церебральный судорожный синдром, сочетанный с мышечной дистонией на фоне недоношенности, правосторонний гемисиндром, сочетается с задержкой моторного развития. Надсегментарные позотонические автоматизмы не выявлены.
Пациенту предложено лечение согласно изобретению. Все отставания врожденных рефлексов преодолены.
Постуральные и установочные рефлексы в норме: ЛУР, СШЦУР, АШЦУР, рефлекс головы на туловище, выпрямляющий рефлекс с тела на тело и с тела на голову; реакции равновесия, оптическая реакция опоры в норме.
В результате: самостоятельно встает на четвереньки и ползает на четвереньках, правая нога полностью разгибается в коленном суставе, мышечный тонус значительно улучшился, улучшилось внимание и координация движений, раскрылась правая кисть, улучшился захват предметов кистями рук. Улучшился диапазон самостоятельно выполняемых движений, возросла кинетическая активность, медленно самостоятельно передвигается вертикально.
Время лечения составило 10 месяцев.
Предложенный способ имеет следующие противопоказания: прогрессирующая гидроцефалия, тяжелые психические расстройства, поражение органов дыхания и пороки сердца, грубые бульбарные и псевдобульбарные нарушения, повышенная ломкость костей и тяжелые нарушения формирования тазобедренных суставов и их сочетания.
Способ показан: при перинатальном поражении ЦНС и ДЦП Р в возрасте до трех лет.
Длительность всего физического воздействия зависит от тяжести ППНС и ДЦП и уровня развития двигательных функций. Для повышения уровня выживания Р необходимо добиться самостоятельного выполнения движения.
Использование изобретения позволяет улучшить двигательные функции при одновременном расширении диапазона самостоятельно выполняемых движений, создать НМП последовательности моделей плавных переходов жизненно необходимых движений при одновременном сокращении сроков лечения в 2 раза.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СОЗДАНИЯ МЫШЕЧНОЙ ПАМЯТИ У ДЕТЕЙ С НАРУШЕНИЯМИ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ | 2019 |
|
RU2723224C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ДЕТЕЙ С СИНДРОМОМ ГЛИКОПРОТЕИНОВ С КАРБОГИДРАТНОЙ НЕДОСТАТОЧНОСТЬЮ | 2012 |
|
RU2502499C1 |
| Тренажер для детей с последствиями перинатального поражения нервной системы и детским церебральным параличом на раннем этапе реабилитации | 2017 |
|
RU2697584C2 |
| Способ стимуляции двигательных навыков у детей на первом году жизни | 2024 |
|
RU2834827C1 |
| Способ стимуляции двигательных навыков у детей со сниженным мышечным тонусом | 2020 |
|
RU2728423C1 |
| СПОСОБ ФОРМИРОВАНИЯ ДВИГАТЕЛЬНЫХ ФУНКЦИЙ МЛАДЕНЦА | 2005 |
|
RU2309720C2 |
| СПОСОБ ЛЕЧЕНИЯ ЗАДЕРЖКИ РАЗВИТИЯ МЕЛКОЙ МОТОРИКИ У ДЕТЕЙ МЛАДШЕГО ВОЗРАСТА | 2013 |
|
RU2532283C1 |
| Способ лечения детей с синдромом двигательных нарушений при перинатальном поражении нервной системы | 2021 |
|
RU2807470C2 |
| СПОСОБ ЛЕЧЕНИЯ СИНДРОМА ДВИГАТЕЛЬНЫХ РАССТРОЙСТВ У ДЕТЕЙ | 2007 |
|
RU2342114C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ВЕРТИКАЛЬНОЙ ПОЗЫ У ИНВАЛИДОВ С ПОРАЖЕНИЕМ ЦЕНТРАЛЬНОЙ НЕРВНОЙ СИСТЕМЫ | 2006 |
|
RU2305534C1 |
Изобретение относится к области медицины, перинатологии, неврологии, реабилитации, лечебной физической культуре, может быть использовано для создания самостоятельных двигательных функций, их совершенствования от неподвижности до ходьбы у ребенка (Р) в возрасте до трех лет. При этом создают нейромышечную динамическую память (НМП) моделей движения Р. Для этого вначале воздействуют на центр каждой ладонной поверхности Р перпендикулярно ей с последующим спиральным массажем от центра каждой ладони Р против часовой стрелки, далее – на центр каждой подошвенной поверхности перпендикулярно ей с последующим спиральным массажем от центра к периферии подошвы против часовой стрелки. Затем последовательно формируют НМП моделей поднятия головы, удержания, поворотов головы, поднятия головы в положении на четвереньках, удержания равновесия из положения Р стоя на четвереньках, модели установления Р в положение на четвереньки, моделей удерживания равновесия в положении на четвереньках, равновесия и движений в положении на четвереньках, ползания на четвереньках, моделей присаживания, координации положения головы, стояния на двух ногах, равновесия и ходьбы из исходных положений и с помощью последовательностей движений, охарактеризованных в формуле. Ритм воздействия постепенно увеличивают, достигая максимума к середине цикла выполнения каждого движения и постепенно уменьшая к его концу; воздействие осуществляют 1-2 раза в день. Способ обеспечивает улучшение двигательных функций при одновременном расширении диапазона самостоятельно выполняемых движений, создание НМП последовательности моделей плавных переходов жизненно необходимых движений при одновременном сокращении сроков реабилитации в 2 раза. 17 ил., 2 пр.
Способ лечения перинатального поражения центральной нервной системы и детского церебрального паралича у детей в возрасте до трех лет, заключающийся в физическом воздействии на ребенка (Р), отличающийся тем, что при этом создают нейромышечную динамическую память (НМП) моделей движения Р:
воздействуют на центр каждой ладонной поверхности Р перпендикулярно ей с последующим спиральным массажем от центра каждой ладони Р против часовой стрелки, далее воздействуют на центр каждой подошвенной поверхности Р перпендикулярно ей с последующим спиральным массажем от центра к периферии подошвы против часовой стрелки;
далее формируют НМП модели поднятия головы: исходное положение (ИП) Р лежа на животе лицом вниз, ноги согнуты в коленях, параллельны, руки согнуты в локтях, Р поднимают за плечи, образуя тупой угол между его туловищем и ногами, фиксируют в этом положении;
формируют НМП модели удержания головы: ИП - Р на коленях, его удерживают в области локтей за предплечья и совершают возвратно-колебательные движения в вертикальной плоскости поперек продольной оси симметрии тела, плавно меняя угол наклона;
а также для формирования данной модели: ИП - Р лежит на спине, сгибают его ноги в коленях, фиксируя стопы на плоскости, подтягивая Р за руки, и держат за них таким образом, чтобы угол между туловищем и горизонтальной поверхностью был острым, совершают колебательные движения в вертикальной плоскости, поперек продольной оси симметрии тела, одновременно доводя угол между туловищем и горизонтальной поверхностью до прямого угла и возвращая туловище Р обратно до острого угла, плавно изменяя угол наклона;
затем формируют НМП модели поворота головы: ИП - Р лежит на спине, его удерживают за ноги и поворачивают туловище вокруг продольной оси симметрии тела, для чего вначале поворачивают ноги направо, затем влево, фиксируя крайние положения;
затем формируют НМП модели поднятия головы в положении на четвереньках: ИП - Р устанавливают на четвереньки, голова опущена, приподнимают голову Р серией последовательных движений;
далее формируют НМП модели удержания равновесия: из положения Р стоя на четвереньках отводят его бедра назад, создают тупой угол между туловищем и бедрами, совершают колебательные движения в вертикальной плоскости;
формируют НМП модели установления Р в положение на четвереньки: ИП - Р укладывают на живот, подтягивая ноги, сгибая в коленях под живот, руки Р располагают параллельно, сгибая в локтях, поднимают таз Р и выпрямляют бедра так, чтобы угол между бедром и голенью был прямым, далее выпрямляют руки Р, устанавливая его в положение на четвереньки так, чтобы образовать прямые углы между руками и туловищем, туловищем и бедрами;
формируют НМП модели удерживания равновесия в положении на четвереньках: из положения стоя на четвереньках Р сажают в сторону на бедро, не отрывая от поверхности его руку со стороны присаживания; отводят вторую руку в сторону до образования развернутого угла между руками, совершают колебательные движения поперек продольной оси симметрии тела, изменяя угол наклона туловища относительно поверхности, фиксируя максимальную амплитуду совершаемых движений;
а также для формирования данной модели: из ИП Р стоя на четвереньках, удерживая его за предплечья, производят колебательные движения вдоль продольной оси симметрии тела, затем - поперек этой оси, затем меняют место удержания Р с предплечья на область таза и повторяют упомянутые колебательные движения;
далее формируют НМП модели равновесия в положении на четвереньках: Р устанавливают в положение опоры на коленях с согнутыми под грудью руками, расположенными параллельно, поддерживают туловище Р в области таза, опускают его таз, затем поднимают его плечи, не отрывая его кистей от поверхности, приподнимают таз, образуя прямые углы между руками и туловищем, туловищем и бедрами, повторяют вышеуказанные колебательные движения;
формируют НМП модели движения на четвереньках: из положения Р стоя на четвереньках осуществляют последовательное передвижение его рук и ног, для чего наклоняют туловище Р вправо, вперед к голове, передвигают левую руку вперед, далее наклоняют туловище влево, вперед к голове, передвигают правую руку вперед, устанавливая ее на одном уровне с левой; далее наклоняют туловище Р вправо, вперед к голове, переставляют левую ногу вперед, затем наклоняют туловище влево, вперед к голове, переставляют правую ногу вперед и устанавливают ее на одном уровне с левой ногой;
а также для формирования этой модели из положения Р стоя на четвереньках осуществляют следующие последовательные передвижения его ног и рук вперед: наклоняют туловище влево, вперед к голове и переставляют правую руку, наклоняют туловище Р вправо, вперед к голове и переставляют последовательно левую ногу и затем левую руку далее положения правой руки, наклоняют туловище Р влево, вперед, переставляют последовательно вперед правую ногу и затем правую руку вперед;
затем формируют НМП модели ползания на четвереньках: предъявляют Р блестящий тест-объект, перемещая его вперед в зоне видимости для Р, стимулируя Р к попыткам поймать тест-объект;
формируют НМП модели присаживания: ИП - Р на четвереньках, опускают его плечи и одновременно поворачивают Р вокруг продольной оси симметрии его тела, сажают Р на горизонтальную поверхность с опорой на руки;
формирую НМП модели координации положения головы: Р предъявляют зрительный тест-объект, стимулируя Р фиксировать на нем взгляд при перемещениях тест-объекта вертикально и/или горизонтально с фиксацией в крайних положениях, а также при перемещениях тест-объекта в виде горизонтальной восьмерки;
формируют НМП модели стояния на двух ногах: ИП - Р присаживают на двух ногах, устанавливая его ноги параллельно, колени согнуты, удерживают Р за грудь под острым углом к поверхности, затем устанавливают Р вертикально, удерживая его в этом положении, затем создают колебательные движения Р в двух взаимно перпендикулярных плоскостях, проходящих через продольную ось симметрии тела Р: со спины к передней поверхности тела и затем перпендикулярно этой плоскости;
далее формируют НМП модели равновесия и ходьбы: ИП - Р стоя на двух ногах, удерживают его туловище за плечи и наклоняют вперед под углом 5-10 град. от вертикали, переставляют вперед одну ногу Р, далее возвращают Р в вертикальное положение, далее повторяют эти движения для второй ноги, затем переставляют ноги Р поочередно вперед, поддерживая его вертикальное равновесие после каждого шага;
ритм воздействия постепенно увеличивают, достигая максимума к середине цикла выполнения каждого движения и постепенно уменьшая к его концу;
воздействие осуществляют 1-2 раза в день.
| СПОСОБ ЛЕЧЕНИЯ ЗАДЕРЖКИ РАЗВИТИЯ МЕЛКОЙ МОТОРИКИ У ДЕТЕЙ МЛАДШЕГО ВОЗРАСТА | 2013 |
|
RU2532283C1 |
| СПОСОБ ЛЕЧЕНИЯ СИНДРОМА ДВИГАТЕЛЬНЫХ РАССТРОЙСТВ У ДЕТЕЙ | 2007 |
|
RU2342114C1 |
| СПОСОБ УВЕЛИЧЕНИЯ ДВИГАТЕЛЬНОЙ АКТИВНОСТИ ДЕТЕЙ С СИНДРОМОМ ГЛИКОПРОТЕИНОВ С КАРБОГИДРАТНОЙ НЕДОСТАТОЧНОСТЬЮ | 2012 |
|
RU2502499C1 |
| WO 1997024099 А1, 10.07.1997 | |||
| БЫКОВСКАЯ Е.Ю | |||
| и др | |||
| Онтогенетическая гимнастика, уч-к для физиотерапевтов, Орел, 2006, с | |||
| Приспособление с иглой для прочистки кухонь типа "Примус" | 1923 |
|
SU40A1 |
| ФОНАРЕВ М.И | |||
| и др | |||
| Лечебная физическая культура при детских заболеваниях, Л., Медицина, 1977, с | |||
| Автоматический тормоз к граммофону | 1921 |
|
SU303A1 |

