Изобретение относится к области радиолокации и может быть использовано при обнаружении траекторий объектов в устройствах вторичной обработки радиолокационной информации импульсно-доплеровских радиолокационных станций (ИД РЛС) с фазированной антенной решеткой (ФАР).
Известен способ обнаружения траектории объекта по данным обзорной РЛС при постоянном периоде регулярного осмотра зоны обзора То, включающий излучение зондирующего сигнала, прием отраженного сигнала (под отраженным сигналом понимается пачка радиоимпульсов, отраженных от объекта за время прохождения через него диаграммы направленности РЛС [Кручинецкий М.Ф. Основы радиолокации. Часть 2. Основы обработки радиолокационных сигналов. Учебник. - Петродворец: ВВМУРЭ им. А.С.Попова, 2006, с.57], обнаружение отраженного сигнала объекта, и, если отраженный сигнал не подходит для продолжения уже существующих траекторий, вычисление границ и осмотр последовательно первого, второго, …, m-1-го стробов первичного захвата траектории (под стробом первичного захвата траектории понимается предварительно рассчитанная двумерная (трехмерная) область пространства с центром в точке обнаружения объекта, в которой с достаточно высокой вероятностью будет находиться объект, способный двигаться в любом направлении от точки его обнаружения с максимально возможной для заданного типа объектов скоростью, за интервал времени, равный периоду обзора РЛС [Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, с.109], в соответствии с установленным критерием завязки траектории, принятие решения о завязке траектории объекта в случае обнаружения сигнала в одном из m-1 стробов первичного захвата траектории, оценку скорости и направления движения объекта и экстраполяцию координат объекта на следующий обзор, вычисление на основе проведенных оценок границ и осмотр последовательно первого, второго, …, n-го стробов подтверждения завязки траектории (под стробом подтверждения завязки траектории понимается предварительно рассчитанная двумерная (трехмерная) область пространства, в которой с известной достаточно высокой вероятностью будет находиться объект, движущийся в направлении и со скоростью, экстраполированными на основе предыдущих данных об объекте, за интервал времени, равный периоду обзора РЛС [Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, с.122], в соответствии с установленным критерием подтверждения, принятие решения об обнаружении траектории объекта в случае обнаружения сигнала в одном n стробов подтверждения завязки траектории; при обнаружении в стробах первичного захвата нескольких отраженных сигналов траектория завязывается по каждому из них; при отсутствии обнаруженных сигналов в стробах первичного захвата (в стробах подтверждения) начальная отметка (завязанная траектория) считается помеховой и сбрасывается [Кузьмин С.З. Основы проектирования систем цифровой обработки радиолокационной информации. - М.: Радио и связь, 1986, с.108-110, 121-122; Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: Пер. с англ. - М.: Радио и связь, 1993, с.26-28].
Недостатками способа являются значительные размеры стробов первичного захвата траектории, которые вычисляются, исходя из максимально возможной скорости цели, на обнаружение которой рассчитана РЛС, из-за невозможности определить путевую скорость объекта по одному измерению и большого интервала времени между двумя последовательными обращениями к объекту, равного периоду обзора РЛС, который в используемых в настоящее время обзорных РЛС с механическим управлением диаграммой направленности антенны в горизонтальной плоскости составляет 6-12 с и более и не может быть существенно сокращен, так как определяется ограниченной скоростью вращения антенны, что приводит к значительным затратам временных и энергетических ресурсов РЛС на регулярный обзор всей зоны видимости РЛС, а также к большому количеству ложных траекторий, формирующихся по отражениям от различных видов помех, происходит перегрузка устройств обработки радиолокационной информации, отвлекаются вычислительные ресурсы, уменьшается пропускная способность РЛС. Этот способ не применим в РЛС с ФАР, у которых время обращения к объекту при осмотре зоны обзора и стробов захвата и подтверждения траектории не постоянно и зависит от степени важности объекта и условий функционирования РЛС [Радиолокационные системы многофункциональных самолетов. Т.1. РЛС - информационная основа боевых действий многофункциональных самолетов. Системы и алгоритмы первичной обработки радиолокационных сигналов / Под ред. А.И.Канащенкова и В.И.Меркулова. - М.: Радиотехника, 2006, с.167].
Известен способ обнаружения траектории объекта, реализуемый в РЛС с ФАР, включающий излучение зондирующего сигнала, прием отраженного сигнала, обнаружение отраженного сигнала объекта в процессе осмотра всей зоны обзора РЛС за время ТО, и, если отраженный сигнал не подходит для продолжения уже существующих траекторий, вычисление границ и осмотр через интервал времени обращения к объекту TЗ, меньший, чем ТО, последовательно первого, второго, …, m-1-го стробов первичного захвата траектории в соответствии с установленным критерием завязки, принятие решения о завязке траектории объекта в случае обнаружения сигнала в одном из m-1 стробов первичного захвата траектории, оценку скорости и направления движения объекта и экстраполяцию координат объекта на следующий обзор, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, …, n-го стробов подтверждения завязки траектории в соответствии с установленным критерием подтверждения, принятие решения об обнаружении траектории объекта в случае обнаружения сигнала в одном n стробов подтверждения завязки траектории; при обнаружении в стробах первичного захвата нескольких отраженных сигналов траектория завязывается по каждому из них; при отсутствии обнаруженных сигналов в стробах первичного захвата (в стробах подтверждения) начальная отметка (завязанная траектория) считается помеховой и сбрасывается; интервал времени обращения к объекту TЗ в стробах первичного захвата рассчитывается как можно меньшим с учетом ошибок измерения координат, степени важности объекта и условий функционирования, интервал времени обращения к объекту ТПЗ в стробах подтверждения рассчитывается исходя из оценки скорости и направления движения объекта [Фарина А., Студер Ф. Цифровая обработка радиолокационной информации. Сопровождение целей: Пер. с англ. - М.: Радио и связь, 1993, с.30-39 и 261-263].
Недостатками способа также являются значительные размеры стробов первичного захвата траектории, одинаковые и для высокоскоростных и для низкоскоростных объектов. В результате в стробы попадает большое количество отраженных сигналов от помех различного происхождения, которые в свою очередь формируют ложные траектории.
Наиболее близким к заявляемому является способ обнаружения траектории объекта [Гурьев В.П., Адоньев О.В., Лужных С.Н. Способ обнаружения траектории объекта // Патент РФ №2297014, 2007], включающий излучение зондирующего сигнала, прием отраженного сигнала, обнаружение отраженного сигнала в процессе регулярного осмотра зоны обзора РЛС, вычисление границ строба подтверждения обнаружения объекта, осмотр его через интервал времени обращения к объекту ТПО, меньший, чем интервал времени обращения к объекту в стробе захвата траектории TЗ, при этом, если в стробе подтверждения обнаружения объекта обнаружен отраженный сигнал и координаты объекта, соответствующие обнаруженному сигналу, изменились, то проводится оценка скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, …, n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе подтверждения обнаружения объекта и в одном из n стробов подтверждения захвата траектории; если отраженный сигнал в стробе подтверждения обнаружения объекта обнаружен, но координаты объекта, соответствующие обнаруженному сигналу, не изменились, то проводится вычисление границ строба захвата траектории, осмотр строба захвата траектории через интервал времени обращения к объекту ТЗ и обнаружение в нем отраженного сигнала, оценку скорости и направления движения объекта, вычисление на основе проведенных оценок границ и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, …, n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта, если отраженный сигнал, обнаруженный при регулярном обзоре зоны обзора РЛС, обнаружен также в стробе захвата траектории и в одном из n стробов подтверждения захвата траектории; если отраженный сигнал в стробе подтверждения обнаружения объекта не обнаружен, то траектория объекта считается необнаруженной и ее обнаружение прекращается. Интервал времени обращения к объекту в стробе подтверждения обнаружения объекта ТПО выбирается, исходя из допустимого количества обнаружений пассивных помех от общего количества отражений при регулярном обзоре, и при допустимом количестве ложных траекторий, формируемым по отражениям от пассивных помех, равным 5-2% от всего количества отражений составляет 0,1-0,5 с.
Недостатками способа, принятого за прототип, являются следующие.
Размеры стробов захвата траектории, вычисляемых, исходя из максимально возможной скорости цели в случае, когда объект в стробе подтверждения обнаружения обнаружен, но его координаты не изменились, необоснованно завышены, так как объект, у которого координаты не изменились за время ТПО, движется со скоростью гораздо меньшей, чем максимально возможная.
Отсутствует порядок расчета интервала времени обращения к объекту в стробе захвата траектории TЗ.
Необоснованно исключен из рассмотрения случай, когда отраженный сигнал в стробе захвата траектории, осматриваемом через интервал времени обращения к объекту TЗ, отсутствует. Основание для того, чтобы не рассматривать этот случай, дают только те условия, в которых TЗ меньше интервала корреляции флуктуации отраженного сигнала от объекта. Для реальных воздушных объектов интервал корреляции составляет 0,02-0,03 с (Бакулев П.А. Радиолокационные системы. - М.: Радиотехника, 2007, с.33), который много меньше ТПО=0,1…0,5 с и много меньше TЗ. Поэтому исключать случай отсутствия отраженного сигнала в стробе захвата траектории нельзя.
Задача, на решение которой направлено данное изобретение, состоит в предотвращении перегрузки устройств обработки радиолокационной информации, высвобождении (уменьшении затрат) вычислительных ресурсов, отвлекаемых на траекторные расчеты, формируемые по отраженным сигналам от помех.
Техническим результатом, достигаемым при осуществлении изобретения, является уменьшение количества ложных траекторий, формируемых по отражениям от помех различного происхождения.
Указанный технический результат достигается тем, что в способе обнаружения траектории объекта, включающем излучение зондирующего сигнала, прием отраженного сигнала, обнаружение отраженного сигнала и определение его координат в процессе регулярного осмотра зоны обзора импульсно-доплеровской радиолокационной станцией (ИД РЛС) с фазированной антенной решеткой (ФАР), вычисление границ строба подтверждения обнаружения объекта, осмотр строба подтверждения обнаружения объекта через интервал времени обращения к объекту ТПО, обнаружение в нем отраженного сигнала, определение его координат и оценку их изменения, оценку путевой скорости и направления движения объекта, если координаты объекта, соответствующие обнаруженному сигналу, изменились, или вычисление границ строба захвата траектории, если координаты объекта, соответствующие обнаруженному сигналу, не изменились, осмотр строба захвата траектории через интервал времени обращения к объекту TЗ, обнаружение в нем отраженного сигнала и определение его координат, оценку путевой скорости и направления движения объекта, вычисление на основе проведенных оценок границ строба и осмотр через интервал времени обращения к объекту ТПЗ последовательно первого, второго, …, n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта или о прекращении ее обнаружения, согласно изобретению дополнительно одновременно с измерением координат отраженного сигнала измеряют абсолютное значение и направление радиальной скорости объекта и вычисляют положения центров и размеры стробов подтверждения обнаружения объекта и захвата траектории по дальности и угловым координатам с учетом измеренной радиальной скорости объекта, ошибки ее измерения и критерия завязки траектории 2/m (m≥2); оценку измеренных координат объекта, обнаруженного в первом стробе подтверждения обнаружения объекта, производят с учетом среднеквадратических отклонений измеренных координат; принимают решение об обнаружении траектории объекта, если отраженный сигнал, обнаруженный в процессе регулярного осмотра зоны обзора РЛС, обнаружен также в одном из m-1 стробов подтверждения обнаружения объекта или в одном из m-1 стробов захвата траектории и в одном из n стробов подтверждения захвата траектории в соответствии с критерием подтверждения 1/n; прекращают обнаружение траектории, если отраженный сигнал не обнаружен ни в одном из m-1 стробов подтверждения обнаружения объекта или ни в одном из m-1 стробов захвата траектории в соответствии с критерием завязки 2/m, либо не обнаружен ни в одном из n стробов подтверждения захвата траектории в соответствии с критерием подтверждения 1/n.
Указанный результат достигается также тем, что:
- координаты центров стробов подтверждения обнаружения объекта по дальности и границы этих стробов вычисляют в соответствии с формулами:
координаты центра i-го строба по дальности: Ro+2i-1Vr·TПО
где: RO - измеренная дальность до обнаруженного отраженного сигнала в процессе регулярного осмотра зоны обзора;
Vr - измеренная радиальная скорость объекта;
границы i-го строба подтверждения обнаружения объекта:
- по угловым координатам: 
где: Vαмакс - максимально возможная скорость объекта по угловым координатам;
σα - среднеквадратическое отклонение измерения угловых координат объекта;
- по дальности: ΔRi=±[2i-1·max(3σR, 3σvr·Tпо)]
где: σR - среднеквадратическое отклонение измерения дальности R до объекта;
σVr - среднеквадратическое отклонение измерения радиальной скорости Vr объекта;
mах(3σR, 3σVr·ТПО) - для расчетов выбирается максимальное из значений 3σR и 3σVr·ТПО.
Координаты центров стробов захвата траектории объекта по дальности и границы этих стробов вычисляют в соответствии с формулами:
координаты центра j-го строба по дальности: RO+2j-1·Vr·ТЗ,
где: ТЗ вычисляется по формуле ТЗ=σR/Vк,
Vк - скорость корабля - носителя РЛС,
границы j-го строба захвата траектории объекта:
- по угловым координатам: 
- по дальности: ΔRj=±[2j-1·max(3σR, 3σvr·TЗ)].
Технический результат обеспечивается за счет использования для построения стробов захвата траектории (подтверждения обнаружения объекта) радиальной скорости объекта, измеряемой импульсно-доплеровскими РЛС с ФАР одновременно с координатами объекта. Это позволяет значительно уменьшить размеры стробов по дальности, за счет этого уменьшить количество отраженных сигналов от помех различного происхождения в стробах и тем самым уменьшить количество траекторий, формируемых по ним.
Изобретение иллюстрируется чертежами, на которых представлены:
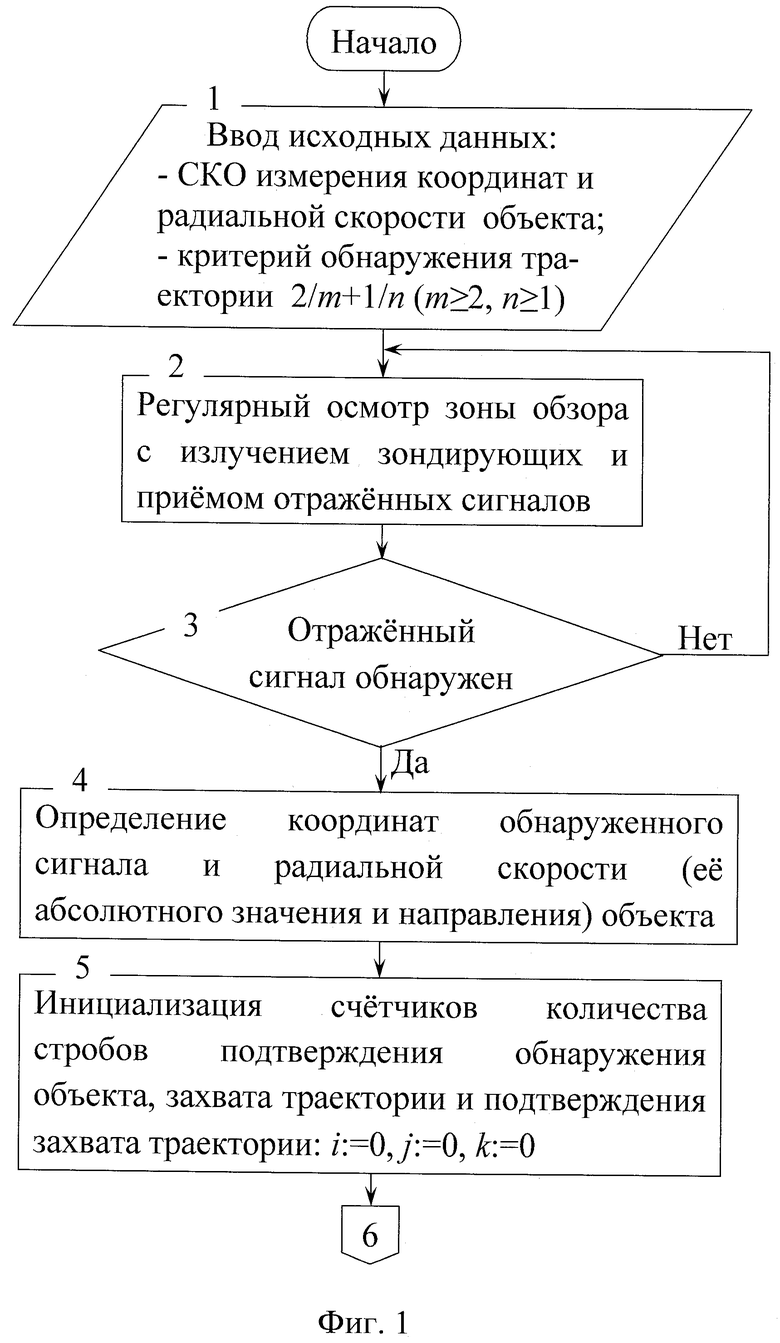
на фиг.1 - Блок-схема алгоритма обнаружения траектории объекта,
на фиг.2 - Построение стробов первичного захвата траектории (подтверждения обнаружения объекта) с использованием измеренной радиальной скорости с критерием захвата траектории 2/3.
Рассмотрим реализацию способа в импульсно-доплеровской РЛС с ФАР на примере установленного критерия обнаружения траектории 2/3+1/2. Осуществление способа поясняется с помощью блок-схемы алгоритма обнаружения траектории объекта, представленной на фиг.1, и рисунка, поясняющего построение стробов первичного захвата траектории (подтверждения обнаружения объекта) с использованием измеренной радиальной скорости с критерием захвата траектории 2/3, представленного на фиг.2. Для простоты понимания рисунка третья координата не показана. Интервал времени Т на рисунке равен ТПО при построении стробов подтверждения обнаружения объекта и TЗ при построении стробов захвата траектории объекта.
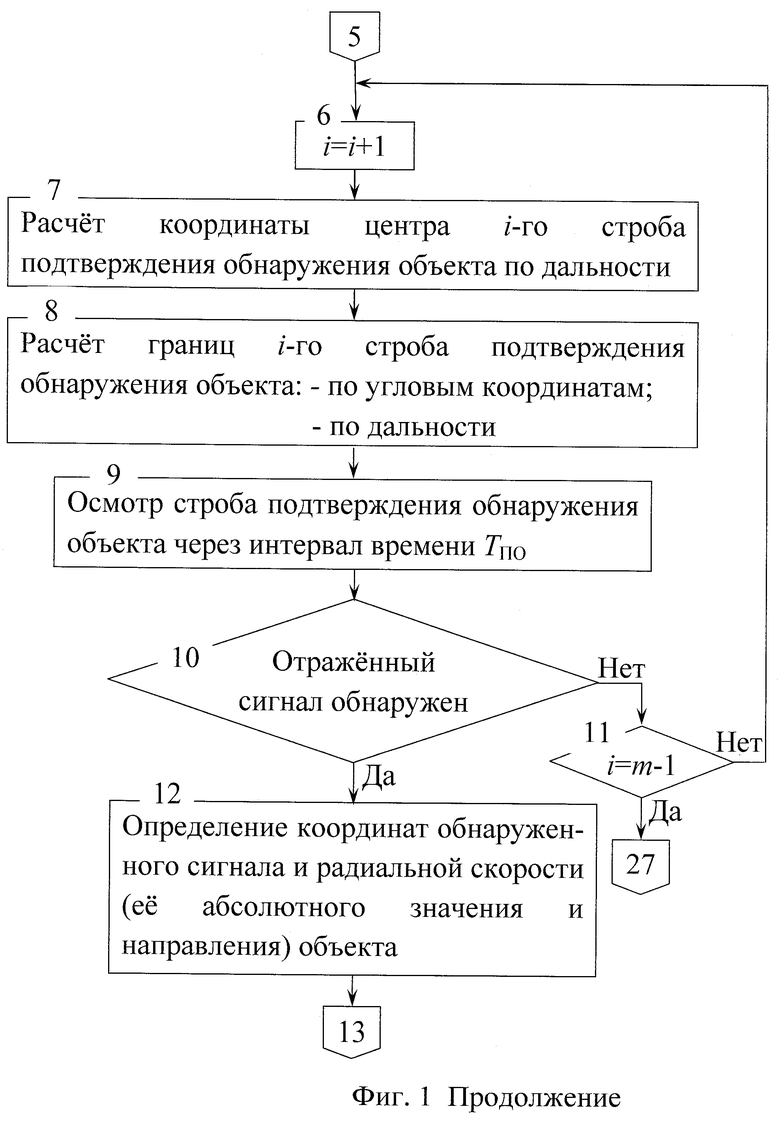
РЛС осуществляет регулярный осмотр зоны обзора за время ТО с излучением зондирующих и приемом отраженных от различных объектов сигналов (блок 2). При обнаружении отраженного сигнала в зоне обзора измеряются его координаты (ПО, RО) и радиальная скорость Vr (ее абсолютное значение и направление) (блок 4) со среднеквадратическими отклонениями (СКО) их измерения σП, σR, и σVr (см. фиг.2). После измерения координат в устройстве вторичной обработки РЛС происходит расчет координаты центра первого строба подтверждения обнаружения объекта по дальности (блок 7) по формуле RЦ1ПО=RО+(-Vr)·TПО (см. фиг.2). Знак «-» говорит о том, что объект сближается с носителем РЛС. Слагаемое (-Vr)·TПО - это расстояние, на которое сблизится объект за интервал времени обращения к объекту в стробе подтверждения обнаружения TПО, который выбирается, исходя из допустимого количества обнаружений пассивных помех от общего количества отражений при регулярном обзоре и при допустимом количестве ложных траекторий, формируемым по отражениям от пассивных помех, равным 5-2% от всего количества отражений, составляет 0.1-0.5 с. Рассчитанное расстояние RЦ1ПО откладывается от места обнаружения отраженного сигнала, обнаруженного при регулярном осмотре зоны обзора, в направлении вектора измеренной радиальной скорости. Полученная точка с координатами ПО и RЦ1ПО и будет являться центром первого строба подтверждения обнаружения объекта. После расчета координат центра строба рассчитываются его границы (блок 8):
- по пеленгу: 
- по дальности: ΔR1ПО=±[max(3σR, 3σVr·TПО)],
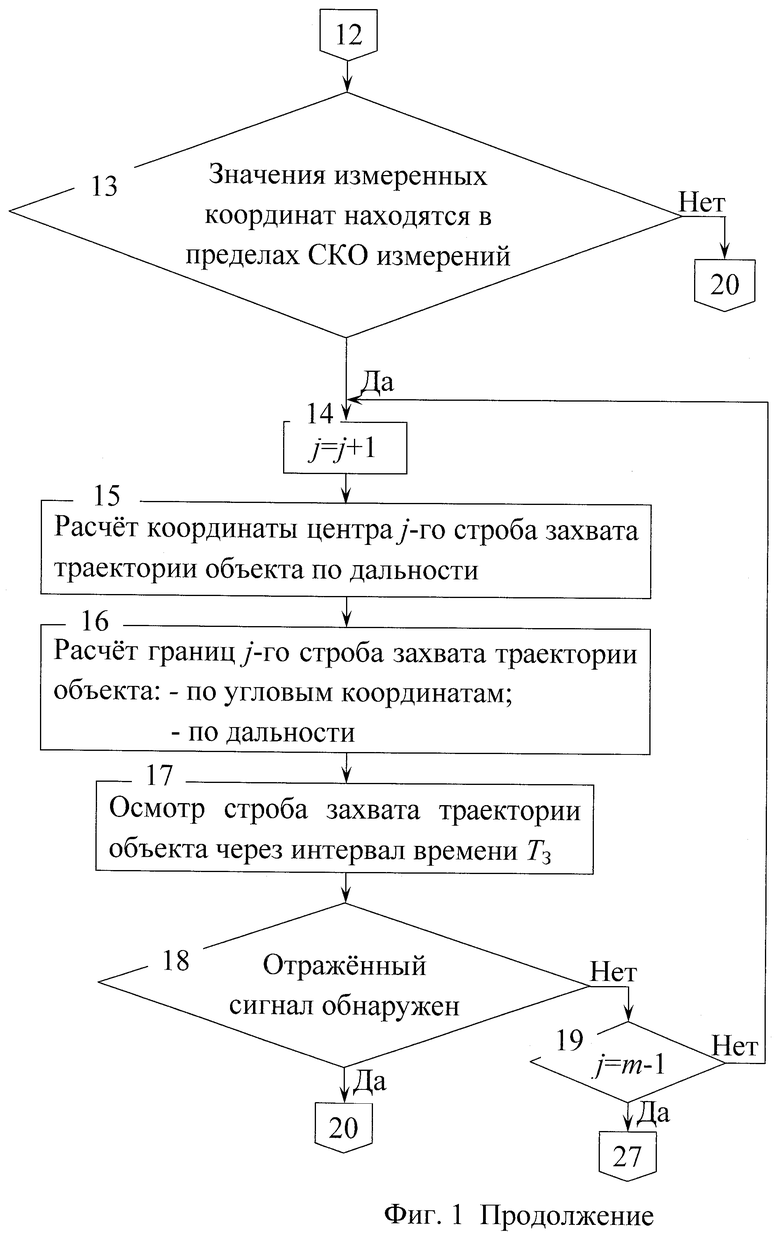
(строб S1 на фиг.2) и через интервал времени ТПО происходит его осмотр. В случае обнаружения отраженного сигнала в первом стробе подтверждения обнаружения объекта измеряются его координаты и радиальная скорость, и производится оценка измеренных координат, заключающаяся в проверке нахождения значений измеренных координат в пределах СКО измерений координат отраженного сигнала, полученного при регулярном обзоре пространства (блок 13). Если значения измеренных координат находятся в пределах СКО измерений координат отраженного сигнала, полученного при регулярном обзоре пространства, то происходит расчет координаты центра первого строба захвата траектории объекта по дальности по формуле RЦ13=RО+(-Vr)·TЗ (блок 15). Рассчитанное расстояние RЦ13 откладывается от места обнаружения отраженного сигнала, обнаруженного при регулярном осмотре зоны обзора, в направлении вектора измеренной радиальной скорости. Полученная точка с координатами ПО и RЦ13 будет являться центром первого строба захвата траектории объекта. После расчета координат центра строба рассчитываются его границы (блок 16):
- по пеленгу:  ,
,
- по дальности: ΔR13=±[max(3σR, 3σvr·TЗ)]
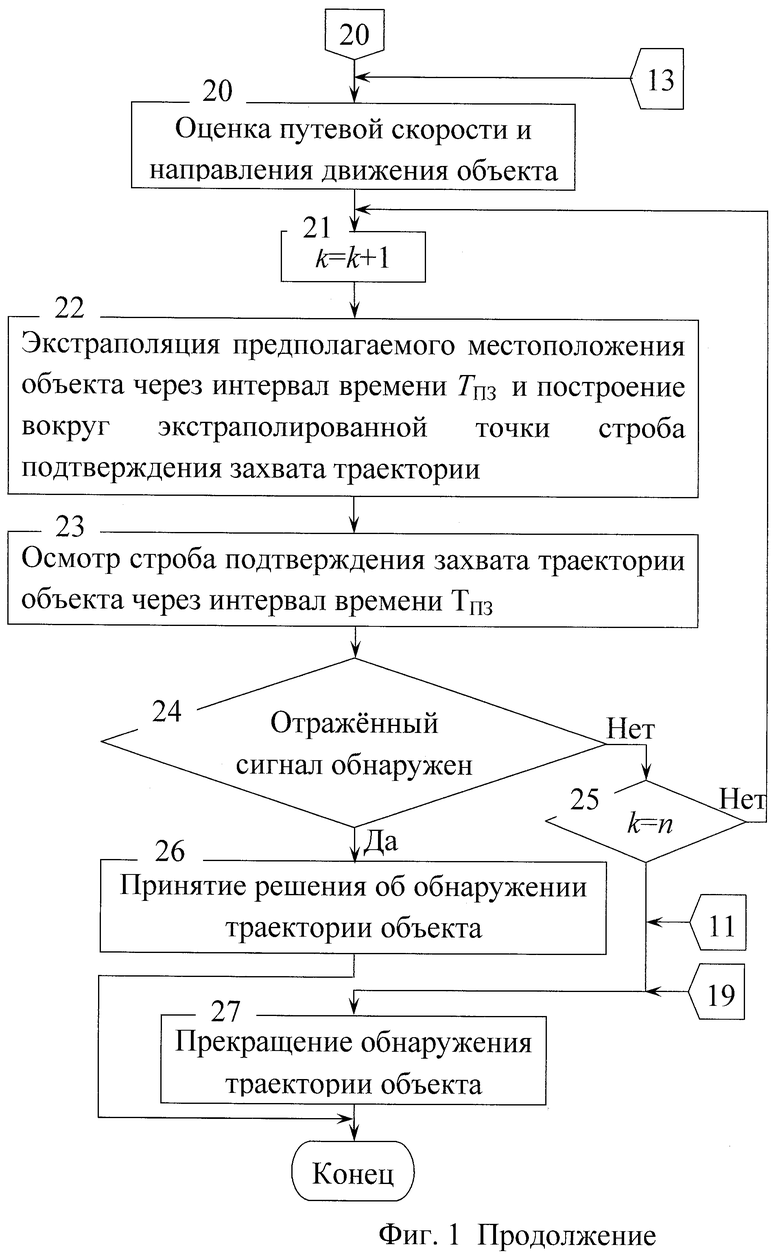
(строб S1 на фиг.2) и через интервал времени ТЗ происходит его осмотр. В случае обнаружения отраженного сигнала в первом стробе захвата траектории объекта критерий завязки траектории считается выполненным. Измеряются координаты и радиальная скорость отраженного сигнала, производится оценка путевой скорости и направления движения объекта и осуществляется экстраполяция предполагаемого местоположения объекта через интервал времени TПЗ (блоки 20, 22). В случае отсутствия отраженного сигнала происходит расчет координаты центра второго строба захвата траектории объекта по дальности по формуле RЦ23=RО+2·(-Vr)·TЗ. Рассчитанное расстояние RЦ23 откладывается от места обнаружения отраженного сигнала, обнаруженного при регулярном осмотре зоны обзора, в направлении вектора измеренной радиальной скорости. Полученная точка с координатами ПО и RЦ23 будет являться центром первого строба захвата траектории объекта. После расчета координат центра строба рассчитываются его границы:
- по пеленгу:  ,
,
- по дальности: ΔR23=±[2·max(3σR, 3σVr·TЗ)],
(строб S2 на фиг.2) и через интервал времени TЗ происходит его осмотр. В случае отсутствия отраженного сигнала во втором стробе захвата траектории критерий завязки 2/3 считается невыполненным и обнаружение траектории прекращается (блок 27). В случае обнаружения отраженного сигнала во втором стробе захвата траектории объекта критерий завязки траектории считается выполненным. Измеряются координаты и радиальная скорость отраженного сигнала, производится оценка путевой скорости и направления движения объекта и осуществляется экстраполяция предполагаемого местоположения объекта через интервал времени ТПЗ (блоки 20, 22). Вокруг экстраполированной точки строится первый строб подтверждения захвата траектории, который осматривается через интервал времени ТПЗ. В случае обнаружения отраженного сигнала критерий подтверждения 1/2 считается выполненным, а траектория объекта обнаруженной (блок 26). В случае отсутствия отраженного сигнала в первом стробе подтверждения обнаружения объекта осуществляется экстраполяция предполагаемого местоположения объекта через интервал времени ТПЗ. Вокруг экстраполированной точки строится второй строб подтверждения захвата траектории, который осматривается через интервал времени ТПЗ. В случае обнаружения отраженного сигнала в стробе критерий подтверждения 1/2 считается выполненным, а траектория объекта обнаруженной. В случае отсутствия отраженного сигнала во втором стробе подтверждения обнаружения объекта критерий подтверждения 1/2 считается невыполненным и обнаружение траектории прекращается (блок 27). Если значения измеренных координат сигнала, обнаруженного в первом стробе подтверждения обнаружения объекта, находятся вне пределов СКО измерений координат отраженного сигнала, полученного при регулярном обзоре пространства, то критерий завязки траектории 2/3 считается выполненным и происходит переход к блоку 20 алгоритма. Если сигнал в первом стробе подтверждения обнаружения объекта не обнаружен, то происходит расчет координаты центра второго строба подтверждения обнаружения траектории объекта по дальности по формуле RЦ2ПО=RO+(-Vr)·TПО. Рассчитанное расстояние RЦ13 откладывается от места обнаружения отраженного сигнала, обнаруженного при регулярном осмотре зоны обзора, в направлении вектора измеренной радиальной скорости. Полученная точка с координатами ПO и RЦ2ПO будет являться центром второго строба захвата траектории объекта. После расчета координат центра строба рассчитываются его границы:
- по пеленгу:  ,
,
- по дальности: ΔR2ПО=±[2·max(3σR, 3σVr·TПО)],
(строб S2 на фиг.2) и через интервал времени TПО происходит его осмотр. В случае отсутствия отраженного сигнала во втором стробе подтверждения обнаружения траектории критерий завязки 2/3 считается невыполненным и обнаружение траектории прекращается (блок 27). В случае обнаружения отраженного сигнала во втором стробе подтверждения обнаружения траектории выполняются действия, указанные в блоках 12 и 13 алгоритма.
Уменьшение количества ложных траекторий, формируемых по отражениям от помех различного происхождения, подтверждено результатами математического моделирования. При моделировании задавались:
- отраженные от помех сигналы распределены равномерно во всей зоне обзора РЛС;
- максимальная скорость объекта 1000 м/с;
- интервал времени обращения к объекту ТПО=0,1 с;
- критерий обнаружения траектории 2/3+1/2.
При изменении вероятности ложной тревоги в элементе разрешения РЛС с 10-3 до 10-5 математическое ожидание количества формируемых ложных траекторий составило от 39,3 до 4,5·10-3 при построении стробов без учета радиальной скорости объекта и от 20,5 до 0,4·10-4 при построении стробов с учетом радиальной скорости объекта, т.е. при заданных исходных данных количество формируемых ложных траекторий при построении стробов с учетом радиальной скорости объекта уменьшилось примерно в два раза по сравнению со способом, взятым за прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2009 |
|
RU2413239C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2012 |
|
RU2530547C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2304789C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ЦЕЛИ | 2019 |
|
RU2710202C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА В ПРОЦЕССЕ ЗАХВАТА И СОПРОВОЖДЕНИЯ ТРАЕКТОРИИ В СТРОБАХ | 2006 |
|
RU2306580C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
| Способ обнаружения маневрирующих малоразмерных воздушных объектов с использованием параметрических преобразований и устройство для его реализации | 2023 |
|
RU2806448C1 |
Изобретение относится к области радиолокации и может быть использовано при обнаружении траекторий объектов в обзорных радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР). Достигаемым техническим результатом является уменьшение количества ложных траекторий, формируемых по отражениям от помех различного происхождения. Способ основан на измерении импульсно-доплеровскими РЛС с ФАР одновременно с координатами объекта его радиальной скорости. Новым является использование радиальной скорости для построения стробов подтверждения обнаружения объекта и захвата траектории. Это позволяет значительно уменьшить размеры стробов по дальности, за счет этого уменьшить количество отраженных сигналов от помех различного происхождения в стробах и тем самым уменьшить количество траекторий, формируемых по ним. 2 з.п. ф-лы, 2 ил.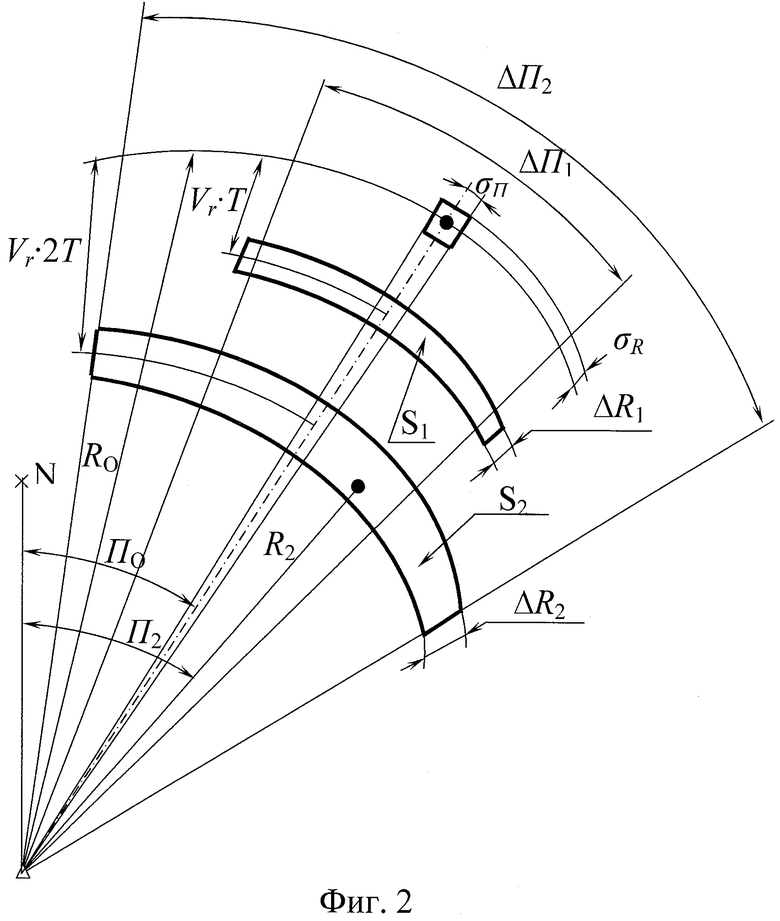
1. Способ обнаружения траектории объекта, включающий излучение зондирующего сигнала, прием отраженного сигнала, обнаружение отраженного сигнала и определение его координат в процессе регулярного осмотра зоны обзора импульсно-доплеровской радиолокационной станцией (РЛС) с фазированной антенной решеткой (ФАР), вычисление границ строба подтверждения обнаружения объекта, осмотр строба подтверждения обнаружения объекта через интервал времени обращения к объекту Тпо, обнаружение в нем отраженного сигнала, определение его координат и оценку их изменения, оценку путевой скорости и направления движения объекта, если координаты объекта, соответствующие обнаруженному сигналу, изменились, или вычисление границ строба захвата траектории, если координаты объекта, соответствующие обнаруженному сигналу, не изменились, осмотр строба захвата траектории через интервал времени обращения к объекту Тз, обнаружение в нем отраженного сигнала и определение его координат, оценку путевой скорости и направления движения объекта, вычисление на основе проведенных оценок границ строба и осмотр через интервал времени обращения к объекту Тпз последовательно первого, второго, …, n-го стробов подтверждения захвата траектории, принятие решения об обнаружении траектории объекта или о прекращении ее обнаружения, отличающийся тем, что дополнительно одновременно с измерением координат отраженного сигнала измеряют абсолютное значение и направление радиальной скорости объекта и вычисляют положения центров и размеры стробов подтверждения обнаружения объекта и захвата траектории по дальности и угловым координатам с учетом измеренной радиальной скорости объекта, ошибки ее измерения и критерия завязки траектории 2/m (m≥2); оценку измеренных координат объекта, обнаруженного в первом стробе подтверждения обнаружения объекта, производят с учетом среднеквадратических отклонений измеренных координат; принимают решение об обнаружении траектории объекта, если отраженный сигнал, обнаруженный в процессе регулярного осмотра зоны обзора РЛС, обнаружен также в одном из m-1 стробов подтверждения обнаружения объекта или в одном из m-1 стробов захвата траектории и в одном из n стробов подтверждения захвата траектории в соответствии с критерием подтверждения 1/n; прекращают обнаружение траектории, если отраженный сигнал не обнаружен ни в одном из m-1 стробов подтверждения обнаружения объекта или ни в одном из m-1 стробов захвата траектории в соответствии с критерием завязки 2/m, либо не обнаружен ни в одном из n стробов подтверждения захвата траектории в соответствии с критерием подтверждения 1/n.
2. Способ по п.1, отличающийся тем, что координаты центров стробов подтверждения обнаружения объекта по дальности и границы этих стробов вычисляют из соотношений:
координаты i-го строба по дальности: Ro+2i-1Vr·ТПО,
где Ro - измеренная дальность до обнаруженного отраженного сигнала в процессе регулярного осмотра зоны обзора;
Vr - измеренная радиальная скорость объекта;
границы i-го строба подтверждения обнаружения объекта
- по угловым координатам: 
где Vαмакс - максимально возможная скорость объекта по угловым координатам;
σα - среднеквадратическое отклонение измерения угловых координат объекта;
- по дальности: ΔRi=±2i-1·max(3σR, 3σvr·Тпо),
где σR - среднеквадратическое отклонение измерения дальности R до объекта;
σVr - среднеквадратическое отклонение измерения радиальной скорости Vr объекта;
max(3σR, 3σvr Тпо) - для расчетов выбирается максимальное из значений 3σR, 3σvr Тпо.
3. Способ по п.1, отличающийся тем, что координаты центров стробов захвата траектории объекта по дальности и границы этих стробов вычисляют из соотношений:
координаты j-го строба по дальности: Ro+2j-1·Vr·Tз,
где Ro - измеренная дальность до обнаруженного отраженного сигнала в процессе регулярного осмотра зоны обзора;
Vr - измеренная радиальная скорость объекта;
Тз - интервал времени обращения к объекту в стробе захвата траектории, вычисляемый из соотношения Тз=σR/VK,
где σR - среднеквадратическое отклонение измерения дальности R до объекта
VK - скорость корабля - носителя РЛС,
границы j-го строба захвата траектории объекта:
- по угловым координатам: 
где Vαмакс - максимально возможная скорость объекта по угловым координатам;
σα - среднеквадратическое отклонение измерения угловых координат объекта;
- по дальности: ΔRj=±2j-1·max(3σR, 3σvr·Тпо),
где σR - среднеквадратическое отклонение измерения дальности R до объекта;
σvr - среднеквадратическое отклонение измерения радиальной скорости Vr объекта;
max(3σR, 3σvr Тпо) - для расчетов выбирается максимальное из значений 3σR, 3σvr Тпо.
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА | 2005 |
|
RU2297014C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2347236C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ТРАЕКТОРИИ ОБЪЕКТА, ОТДЕЛИВШЕГОСЯ ОТ ОБЪЕКТА-НОСИТЕЛЯ | 2007 |
|
RU2345383C1 |
| WO 2004074866 A1, 02.09.2004 | |||
| US 2009295624 A1, 03.12.2009 | |||
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДОГРЕВАНИЯ ВОЗДУХА ПРИ НАЛОЖЕНИИ ПНЕЙМОТОРАКСА | 1925 |
|
SU4401A1 |

