Ссылки на родственные заявки
Область техники
Настоящее изобретение относится к усовершенствованным синхронизации по времени и передаче значений времени для синхронизации по времени и передачи значений времени для группировок спутников, в частности оно относится к усовершенствованным синхронизации по времени и к передаче значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени.
Раскрытие изобретения
Настоящее изобретение относится к способу, системе и устройству для усовершенствованных синхронизации по времени и передачи значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени. В частности, настоящее изобретение предлагает способ синхронизации по времени для группировки спутников. Раскрытый способ включает передачу, по меньшей мере одним первым спутником, по меньшей мере одного сигнала определения расстояния между спутниками по меньшей мере на один второй спутник. В одном или более вариантов реализации по меньшей мере один первый спутник и/или по меньшей мере один второй спутник представляет собой синхронизирующий спутник со временем синхронизации. Способ дополнительно включает прием по меньшей мере одним вторым спутником по меньшей мере одного сигнала определения расстояния между спутниками. Кроме того, способ включает вычисление по меньшей мере одного результата измерения расстояния от по меньшей мере одного первого спутника до по меньшей мере одного второго спутника при использовании значения времени, прошедшего от передачи по меньшей мере одного сигнала определения расстояния между спутниками до приема по меньшей мере одного сигнала определения расстояния между спутниками. Кроме того, способ включает вычисление оценки времени и частоты для по меньшей мере одного первого спутника и для по меньшей мере одного второго спутника друг относительно друга с целью синхронизации времени и частоты для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника при использовании по меньшей мере одного результата измерения расстояния и/или времени синхронизации по меньшей мере от одного синхронизирующего спутника.
В одном или более вариантов реализации настоящего изобретения по меньшей мере один первый спутник представляет собой синхронизирующий спутник со временем синхронизации, и по меньшей мере один второй спутник представляет собой несинхронизирующий спутник без времени синхронизации. По меньшей мере в одном варианте реализации настоящего изобретения время синхронизации представляет собой точное время. В некоторых вариантах реализации настоящего изобретения по меньшей мере один синхронизирующий спутник принимает время синхронизации посредством по меньшей мере одного сигнала глобальной навигационной системы GPS, по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала спутника Galileo, по меньшей мере одного сигнала навигационной системы Бэйдоу и/или посредством атомных часов. В одном или более вариантов реализации настоящего изобретения время синхронизации не представляет собой точное время. По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один второй спутник представляет собой синхронизирующий спутник со временем синхронизации, и по меньшей мере один первый спутник представляет собой несинхронизирующий спутник без времени синхронизации.
По меньшей мере в одном варианте реализации настоящего изобретения способ дополнительно включает выработку по меньшей мере одного сигнала коррекции для синхронизации времени и частоты для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника и передачу по меньшей мере одного сигнала коррекции по меньшей мере на один первый спутник и/или по меньшей мере на один второй спутник. В некоторых вариантах реализации настоящего изобретения по меньшей мере один первый спутник и по меньшей мере один второй спутник представляют собой спутник на низкой околоземной орбите, спутник на средней околоземной орбите и/или спутник на геостационарной орбите. В некоторых вариантах реализации настоящего изобретения спутник на низкой околоземной орбите представляет собой спутник на низкой околоземной орбите типа Iridium или спутник на низкой околоземной орбите типа Iridium Следующего Поколения.
В одном или более вариантов реализации настоящего изобретения раскрытый способ использует группировку спутников типа Iridium на низкой околоземной орбите. По меньшей мере в одном варианте реализации настоящего изобретения каждый из группировки спутников типа Iridium на низкой околоземной орбите имеет геометрию антенны, излучающую сорок восемь (48) узких лучей с диаграммой направленности в виде различимых узких лучей. По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один сигнал межспутниковой связи может быть передан от по меньшей мере одного из спутников типа Iridium в группировке. Сорок восемь (48) узких лучей спутника типа Iridium могут быть использованы для передачи локализованных сигналов в точки приема (например, опорные станции), расположенные на поверхности Земли или около нее. Следует отметить, что при использовании одного из вышеописанных спутников типа Iridium на низкой околоземной орбите мощность передаваемого сигнала достаточно велика для обеспечения возможности надежного проникновения сигнала во внутриквартирную среду, причем для реализации этого могут быть использованы способы кодирования сигнала. Следует далее отметить, что эта система может использовать по меньшей мере один спутник типа Iridium следующего поколения или конфигурацию в виде комбинации существующих спутников типа Iridium со спутником типа Iridium следующего поколения.
В одном или более вариантов реализации настоящего изобретения способ дополнительно включает передачу по меньшей мере одним синхронизирующим спутником по меньшей мере одного сигнала позиционирования по меньшей мере на одну опорную станцию. Способ также включает прием по меньшей мере одной опорной станцией по меньшей мере одного сигнала позиционирования. Кроме того, способ включает вычисление по меньшей мере одного результата измерения позиционного расстояния от по меньшей мере одного синхронизирующего спутника до по меньшей мере одной опорной станции при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования. Кроме того, способ включает вычисление оценки орбитального позиционирования для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника при использовании по меньшей мере одного результата измерения расстояния, времени синхронизации, данных позиционирования от по меньшей мере одного синхронизирующего спутника и/или по меньшей мере одного результата измерения позиционного расстояния. По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один синхронизирующий спутник принимает данные о расположении посредством по меньшей мере одного сигнала глобальной навигационной системы GPS, по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала навигационной системы Бэйдоу и/или по меньшей мере одного сигнала спутника Galileo.
По меньшей мере в одном варианте реализации настоящего изобретения способ дополнительно включает передачу по меньшей мере одной опорной станцией по меньшей мере одного сигнала позиционирования по меньшей мере на один синхронизирующий спутник. Кроме того, способ включает прием, по меньшей мере одним синхронизирующим спутником, по меньшей мере одного сигнала позиционирования. Кроме того, способ включает вычисление по меньшей мере одного результата измерения позиционного расстояния по меньшей мере от одной опорной станции до по меньшей мере одного синхронизирующего спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования (то есть, до времени прибытия по меньшей мере одного сигнала позиционирования относительно часов приемника, которые в этом случае размещены на синхронизирующем спутнике). Кроме того, способ включает вычисление оценки орбитального позиционирования для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника посредством использования по меньшей мере одного результата измерения расстояния, времени синхронизации, данных позиционирования от по меньшей мере одного синхронизирующего спутника и/или по меньшей мере одного результата определения позиционного расстояния. В некоторых вариантах реализации настоящего изобретения по меньшей мере один синхронизирующий спутник принимает данные о расположении посредством по меньшей мере одного сигнала глобальной навигационной системы GPS, по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала навигационной системы Бэйдоу и/или по меньшей мере одного сигнала спутника Galileo.
В одном или более вариантов реализации настоящего изобретения способ синхронизации по времени для группировки спутников включает передачу по меньшей мере одним первым спутником по меньшей мере одного первого сигнала определения расстояния между спутниками по меньшей мере на один второй спутник. По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один первый спутник и/или по меньшей мере один второй спутник представляет собой синхронизирующий спутник со временем синхронизации. Способ дополнительно включает прием по меньшей мере одним вторым спутником по меньшей мере одного первого сигнала определения расстояния между спутниками. Кроме того, способ включает передачу по меньшей мере одним вторым спутником по меньшей мере одного второго сигнала определения расстояния между спутниками по меньшей мере на один первый спутник. Кроме того, способ включает прием по меньшей мере одним первым спутником по меньшей мере одного второго сигнала определения расстояния между спутниками. Дополнительно способ включает вычисление по меньшей мере одного результата первого измерения расстояния от по меньшей мере одного первого спутника до по меньшей мере одного второго спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного первого сигнала определения расстояния между спутниками до момента приема по меньшей мере одного первого сигнала определения расстояния между спутниками. Кроме того, способ включает вычисление по меньшей мере одного результата второго измерения расстояния от по меньшей мере одного второго спутника до по меньшей мере одного первого спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного второго сигнала определения расстояния между спутниками до момента приема по меньшей мере одного второго сигнала определения расстояния между спутниками. Кроме того, способ включает вычисление оценки времени и частоты для по меньшей мере одного первого спутника и по меньшей мере одного второго спутника друг относительно друга с целью синхронизации времени и частоты для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника при использовании по меньшей мере одного результата первого измерения расстояния, по меньшей мере одного результата второго измерения расстояния, и/или времени синхронизации от по меньшей мере одного синхронизирующего спутника.
По меньшей мере в одном варианте реализации настоящего изобретения система синхронизации по времени для группировки спутников содержит по меньшей мере один первый спутник, выполненный с возможностью передачи по меньшей мере одного сигнала определения расстояния между спутниками на по меньшей мере один второй спутник. Система дополнительно содержит по меньшей мере один второй спутник, выполненный с возможностью получения по меньшей мере одного сигнала определения расстояния между спутниками. В одном или более вариантов реализации настоящего изобретения по меньшей мере один первый спутник и/или по меньшей мере один второй спутник представляет собой синхронизирующий спутник со временем синхронизации. Кроме того, система содержит по меньшей мере один процессор, выполненный с возможностью вычисления по меньшей мере одного результата измерения расстояния от по меньшей мере одного первого спутника до по меньшей мере одного второго спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала определения расстояния между спутниками до момента приема по меньшей мере одного сигнала определения расстояния между спутниками. Кроме того, система содержит по меньшей мере один процессор, выполненный с дополнительной возможностью вычисления оценки времени и частоты для по меньшей мере одного первого спутника и по меньшей мере одного второго спутника друг относительно друга с целью синхронизации времени и частоты для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника при использовании по меньшей мере одного результата измерения расстояния и/или времени синхронизации от по меньшей мере одного синхронизирующего спутника.
В одном или более вариантов реализации настоящего изобретения по меньшей мере один процессор выполнен с дополнительной возможностью выработки по меньшей мере одного сигнала коррекции для синхронизации времени и частоты для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника. По меньшей мере в одном варианте реализации настоящего изобретения система дополнительно содержит по меньшей мере одно передающее устройство, выполненное с возможностью передачи по меньшей мере одного сигнала коррекции по меньшей мере на один первый спутник и/или по меньшей мере на один второй спутник.
По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один синхронизирующий спутник выполнен с дополнительной возможностью передачи по меньшей мере одного сигнала позиционирования по меньшей мере на одну опорную станцию. В некоторых вариантах реализации настоящего изобретения по меньшей мере одна опорная станция выполнена с возможностью получения по меньшей мере одного сигнала позиционирования. В одном или более вариантов реализации настоящего изобретения по меньшей мере один процессор выполнен с дополнительной возможностью вычисления по меньшей мере одного результата измерения позиционного расстояния от по меньшей мере одного синхронизирующего спутника до по меньшей мере одной опорной станции при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования, и вычисления оценки орбитального позиционирования для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника при использовании по меньшей мере одного результата измерения расстояния, времени синхронизации, данных позиционирования от по меньшей мере одного синхронизирующего спутника и/или по меньшей мере одного определения позиционного расстояния.
В одном или более вариантов реализации настоящего изобретения система дополнительно содержит по меньшей мере одну опорную станцию, выполненную с возможностью передачи по меньшей мере одного сигнала позиционирования по меньшей мере на один синхронизирующий спутник. По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один синхронизирующий спутник выполнен с дополнительной возможностью приема по меньшей мере одного сигнала на запрос позиционирования. В некоторых вариантах реализации настоящего изобретения по меньшей мере один процессор выполнен с дополнительной возможностью вычисления по меньшей мере одного результата измерения позиционного расстояния от по меньшей мере одной опорной станции до по меньшей мере одного синхронизирующего спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования, и вычисления оценки орбитального позиционирования для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника при использовании по меньшей мере одного результата измерения расстояния, времени синхронизации, данных позиционирования от по меньшей мере одного синхронизирующего спутника и/или по меньшей мере одного результата определения позиционного расстояния.
По меньшей мере в одном варианте реализации настоящего изобретения система синхронизации по времени для группировки спутников содержит по меньшей мере один первый спутник, выполненный с возможностью передачи по меньшей мере одного первого сигнала определения расстояния между спутниками по меньшей мере на один второй спутник и приема по меньшей мере одного второго сигнала определения расстояния между спутниками. Система дополнительно содержит по меньшей мере один второй спутник, выполненный с возможностью приема по меньшей мере одного первого сигнала определения расстояния между спутниками и передачи по меньшей мере одного второго сигнала определения расстояния между спутниками. В одном или более вариантов реализации настоящего изобретения по меньшей мере один первый спутник и/или по меньшей мере один второй спутник представляет собой синхронизирующий спутник со временем синхронизации. Кроме того, система содержит по меньшей мере один процессор, выполненный с возможностью вычисления по меньшей мере одного первого результата измерения расстояния по меньшей мере от одного первого спутника до по меньшей мере одного второго спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного первого сигнала определения расстояния между спутниками до момента приема по меньшей мере одного первого сигнала определения расстояния между спутниками. Кроме того, система содержит по меньшей мере один процессор, выполненный с дополнительной возможностью вычисления по меньшей мере одного второго результата измерения расстояния по меньшей мере от одного второго спутника до по меньшей мере одного первого спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного второго сигнала определения расстояния между спутниками до момента приема по меньшей мере одного второго сигнала определения расстояния между спутниками. Кроме того, система содержит по меньшей мере один процессор, выполненный с дополнительной возможностью вычисления оценки времени и частоты для по меньшей мере одного первого спутника и по меньшей мере одного второго спутника друг относительно друга с целью синхронизации времени и частоты для по меньшей мере одного первого спутника и/или по меньшей мере одного второго спутника при использовании по меньшей мере одного результата первого измерения расстояния, по меньшей мере одного результата второго измерения расстояния и/или времени синхронизации от по меньшей мере одного синхронизирующего спутника.
В одном или более вариантов реализации настоящего изобретения раскрытая система и способ используют группировку спутников типа Iridium следующего поколения, причем подмножество группировки оборудовано GPS-приемниками или, в качестве альтернативы, дополнительным точным источником времени. Это подмножество, распространенное на все плоскости, обеспечивает связь с непрерывным обеспечением значений точного времени и частоты в пределах группировки посредством определения расстояния до спутников, не оборудованных GPS-приемниками.
По меньшей мере в одном варианте реализации настоящего изобретения группировка спутников типа Iridium Следующего Поколения включает подмножество группировки, оборудованное GPS-приемниками или, в качестве альтернативы, источником точного времени, используемого для подачи точных данных синхронизации по времени на оборудованные средствами межспутниковой связи спутники Iridium (существующая группировка).
В одном или более вариантов реализации настоящего изобретения спутник, прикрепленный к источнику точного времени (то есть синхронизирующий спутник), и/или спаренный спутник (то есть несинхронизирующий спутник), могут быть использованы для передачи сообщения о позиционировании, навигации и синхронизации по времени пользователю на Земле с включенным приемником таким образом, чтобы они могли поддерживать точное время или использовать его в качестве сигнала определения расстояния.
По меньшей мере в одном варианте реализации настоящего изобретения межспутниковые каналы связи могут охватывать многие группировки спутников различного предназначения.
В одном или более вариантов реализации настоящего изобретения межспутниковые каналы связи могут охватывать по меньшей два набора спутников (то есть, таких, как две группы спутников одинакового предназначения, например, спутников типа Iridium и спутников типа Iridium следующего поколения) с похожим, если не одинаковым предназначением.
По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один спутник может определить положение и время, используя GPS-спутники. В некоторых вариантах реализации настоящего изобретения по меньшей мере один спутник может определить положение и время, используя комбинацию спутников типа Iridium и GPS.
В одном или более вариантов реализации настоящего изобретения раскрытая система содержит по меньшей мере один спутник на низкой околоземной орбите с источником точного времени (то есть синхронизирующий спутник), по меньшей мере один спутник на низкой околоземной орбите, выполненный с возможностью межспутниковой связи с предыдущим указанным спутником на низкой околоземной орбите для получения точных данных о времени (то есть несинхронизирующий спутник), и по меньшей мере одну наземную опорную станцию для связи системы отсчета точного времени с системой отсчета времени спутников на низкой околоземной орбите.
По меньшей мере в одном варианте реализации настоящего изобретения раскрытая система содержит группировку спутников на низкой околоземной орбите, где подмножество спутников на низкой околоземной орбите снабжено источником точного времени (например, GPS-приемником) (то есть, они представляют собой синхронизирующие спутники) и где остальные спутники (то есть, несинхронизирующие спутники) в группировке выполнены с возможностью межспутниковой связи с предыдущими спутниками (то есть, синхронизирующими спутниками) таким образом, что все спутники в пределах группировки выполнены с возможностью получать точные данные о времени. Система дополнительно содержит по меньшей мере одну наземную опорную станцию, связывающую систему отсчета точного времени с системой отсчета времени спутников на низкой околоземной орбите.
В одном или более вариантов реализации настоящего изобретения раскрытая система содержит по меньшей мере один спутник на низкой околоземной орбите с источником точного времени (то есть, синхронизирующий спутник), и по меньшей мере один спутник на низкой околоземной орбите (то есть, несинхронизирующий спутник), способный к выполнению межспутниковой связи с предыдущим указанным спутником на низкой околоземной орбите (то есть, с синхронизирующим спутником) для получения точных данных о времени. Система дополнительно содержит по меньшей мере одну наземную опорную станцию, связывающую систему отсчета точного времени с системой отсчета времени спутников на низкой околоземной орбите и включенным приемным пользовательским устройством.
По меньшей мере в одном варианте реализации настоящего изобретения спутниковые операторы могут использовать результаты измерений посредством межспутниковой связи для спутниковых операций, например, для оценки ухода частоты генераторов спутников и, при наличии данных о систематической погрешности и скорости систематической погрешности значения времени спутника, для выработки команд, предназначенных для регулировки времени и частоты спутника в пределах допустимых границ.
В одном или более вариантов реализации настоящего изобретения для извлечения максимальных преимуществ от выполнения измерений точно установленного времени приема изобретение проводит точные измерения времени приема и доплеровские измерения вместе с наземными опорными станциями для оптимальной оценки радиального компонента орбиты, что может быть использовано для определения орбиты.
Характерные особенности, функции и преимущества могут быть независимо достигнуты в различных вариантах реализации настоящего изобретения или могут быть объединены в других вариантах.
Краткое описание чертежей
Эти и другие характерные особенности, аспекты и преимущества настоящего изобретения станут лучше понятными после прочтения последующего описания, приложенных пунктов формулы изобретения и рассмотрения сопровождающих чертежей, где:
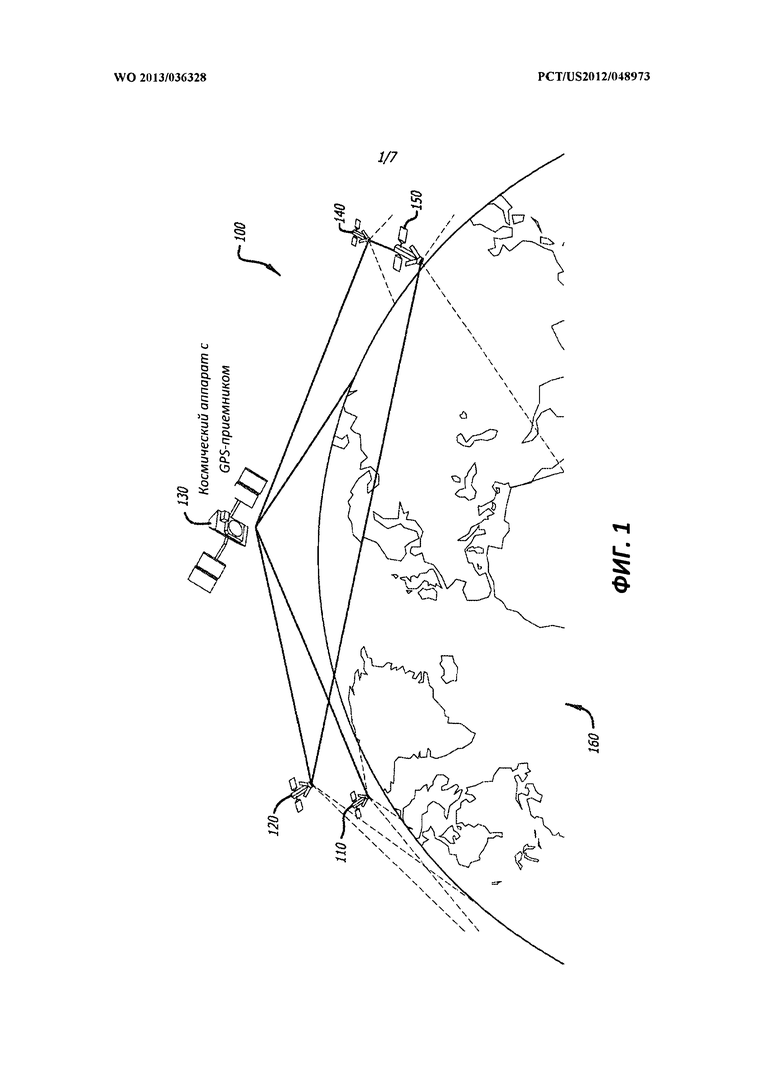
На фиг. 1 показана принципиальная схема взятой в качестве примера группировки спутников, которые могут быть использованы раскрытой системой для усовершенствованных синхронизации по времени и передачи значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения.
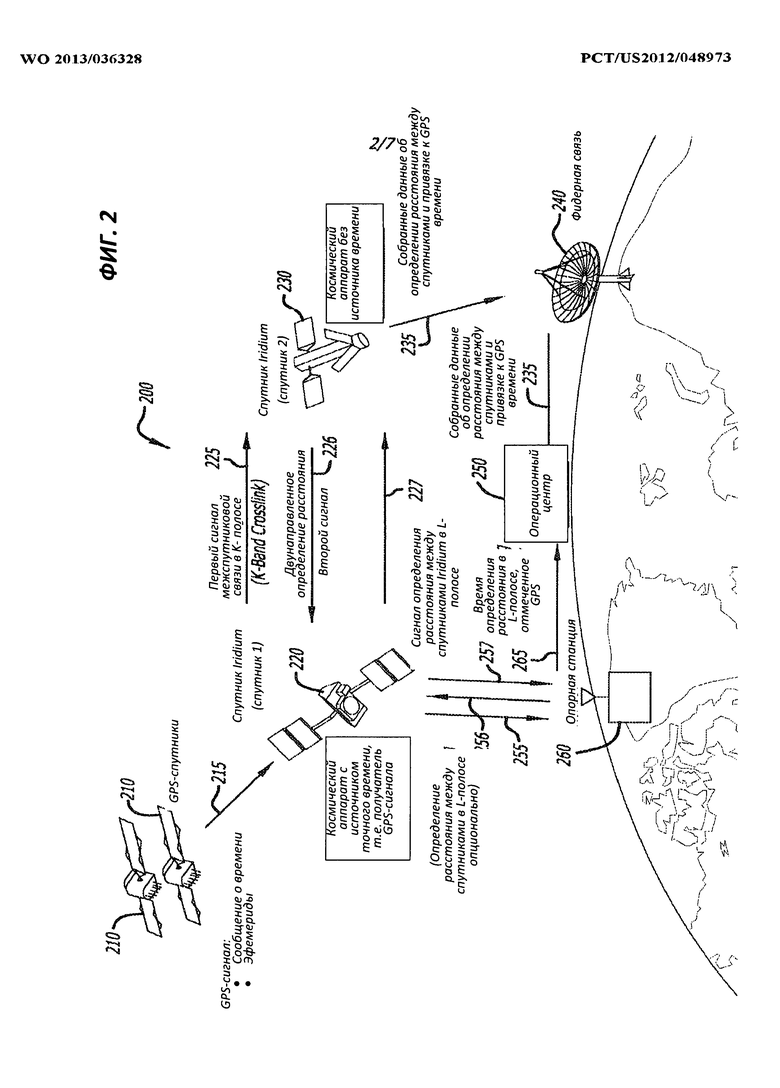
На фиг. 2 показана принципиальная схема раскрытой системы для усовершенствованных синхронизации по времени и передачи значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения.
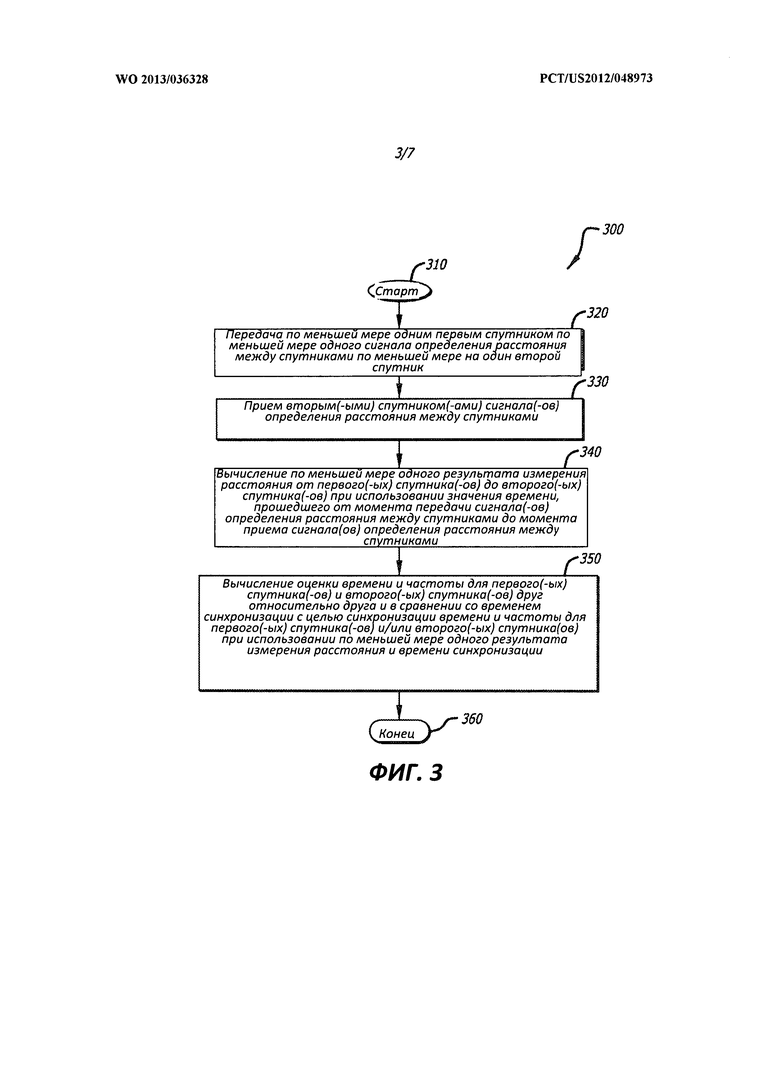
На фиг. 3 показана блок-схема для раскрытого способа усовершенствованных синхронизации по времени и передачи значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения.
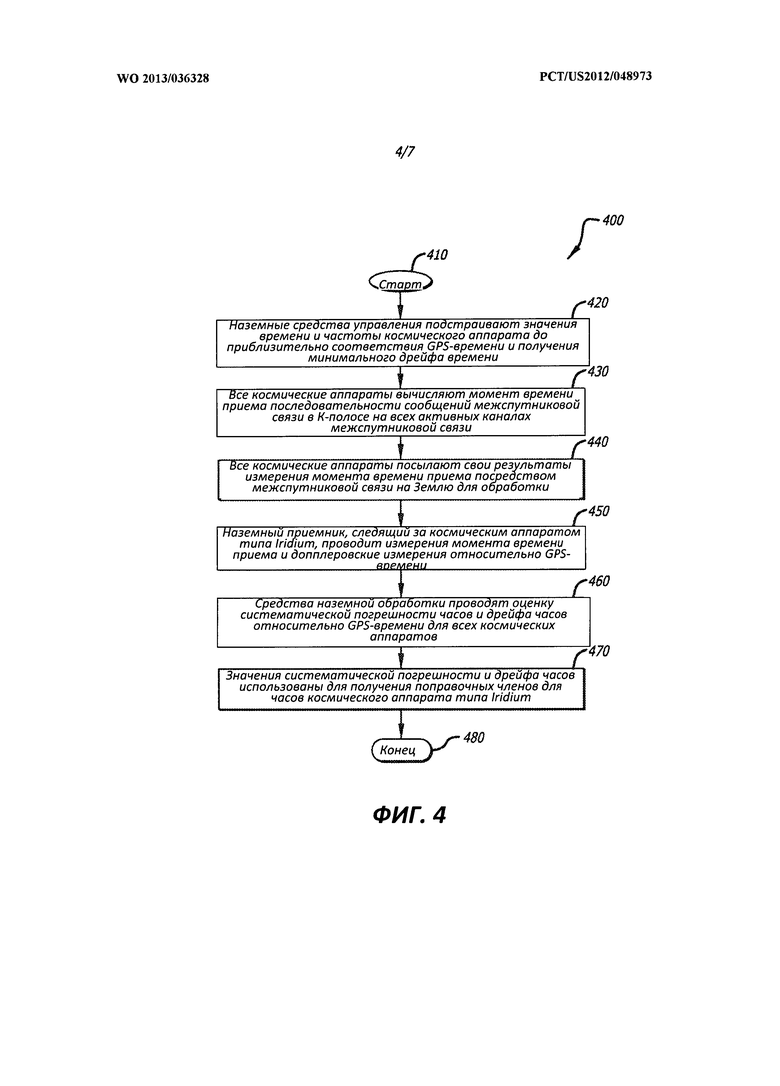
На фиг. 4 показана блок-схема для детализованного способа синхронизации времени посредством определения расстояния между спутниками и использования эталонных часов наземной станции в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения.
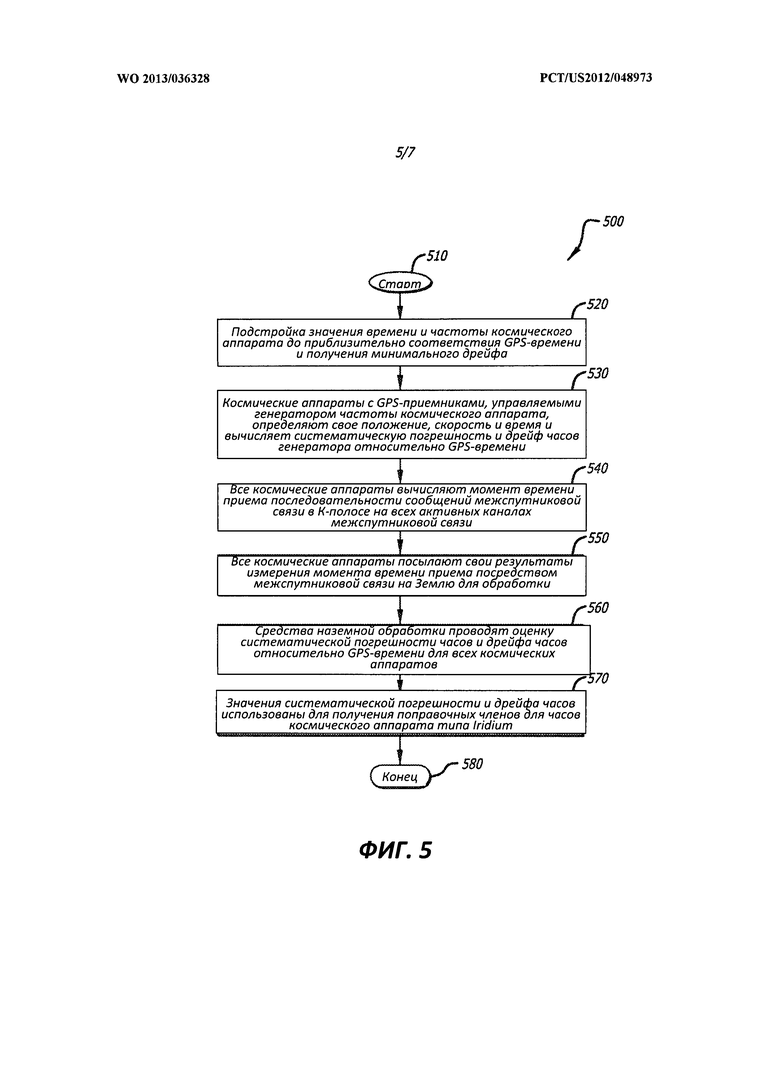
На фиг. 5 показана блок-схема для детализованного способа синхронизации времени посредством определения расстояния между спутниками и использования по меньшей мере одного спутника типа Iridium, оборудованный GPS-приемником, в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения.
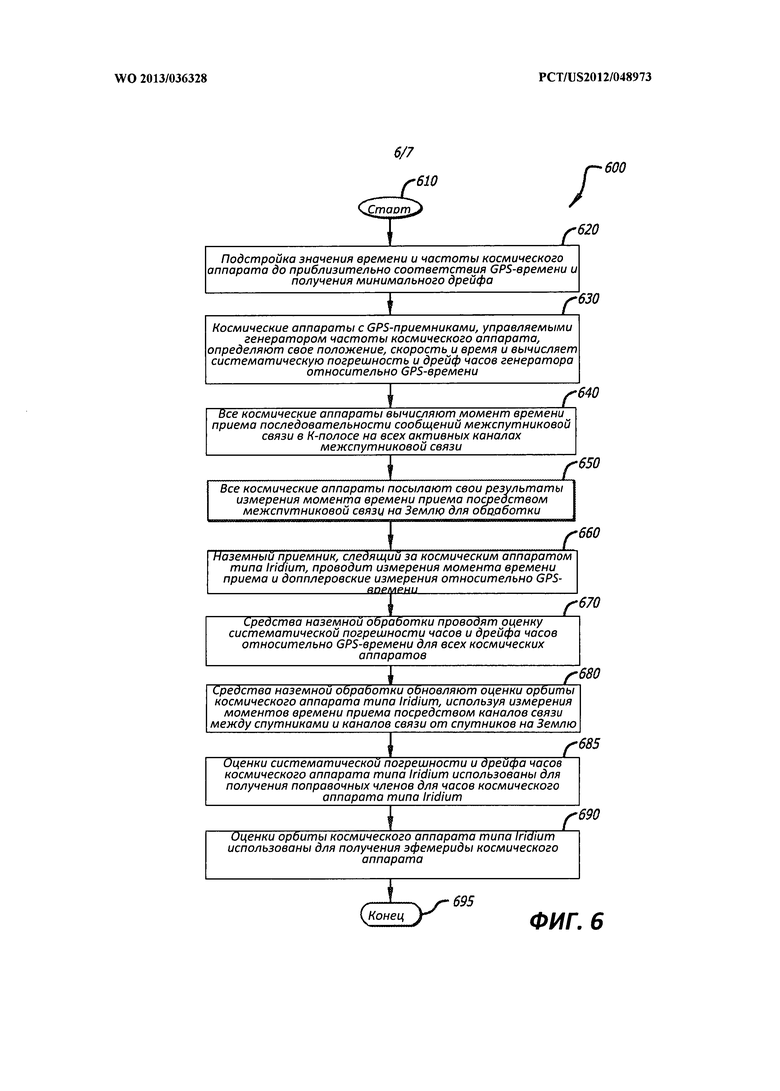
На фиг. 6 показана блок-схема для детализованного способа синхронизации времени и определения орбиты посредством определения расстояния между спутниками и измерения времени приема на Земле для оценки эфемерид группировки спутников типа Iridium в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения.
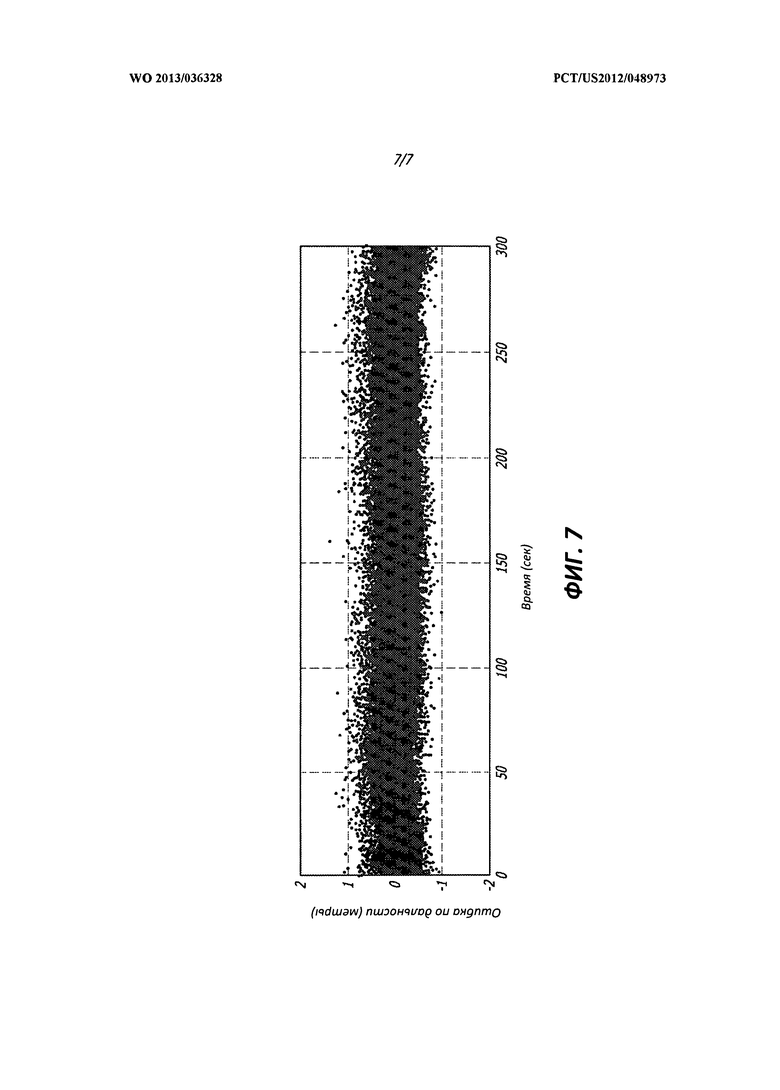
На фиг. 7 показан график, отражающий точность, достижимую при измерении расстояния между спутниками в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения.
Описание изобретения
Раскрытые здесь способы и устройства предлагают действующую систему для усовершенствованных синхронизации по времени и передачи значений времени для группировок спутников. В частности, система относится к усовершенствованным синхронизации по времени и передаче значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени.
Настоящее изобретение относится в целом к системам обеспечения улучшенных позиционирования, навигации и информации о времени для калибровки генератора и, конкретнее, к использованию по меньшей мере одного спутника, выполненного с возможностью доступа к источнику точного времени, для калибровки локального генератора на спутнике, соединенном с указанным спутником каналом межспутниковой связи. По меньшей мере в одном варианте реализации настоящего изобретения точное время на подмножестве спутников с возможностями межспутниковой связи использовано для распределения времени по сети спутников, связанных межспутниковой связью.
Раскрытые система и способ обладают по меньшей мере пятью главными характерными особенностями. Первая основная особенность состоит в оценки значения времени от спаренного спутника посредством канала межспутниковой связи. Эта характерная особенность основана на способе оценки точного времени на спутнике в пределах группировки спутников без наземного слежения. Соединенный в виде сети посредством каналов межспутниковой связи набор спутников может проводить измерения точного времени приема относительно непосредственно соседствующих с этими спутниками и соединенных сетью спаренных спутников (то есть, относительно их собственного генератора космического аппарата и со знанием времени). Преимущество этого подхода состоит в том, что он обеспечивает возможность соединенным в сеть парам спутников выгодно использовать преимущества другого спутника, потенциально без высоких расходов, связанных с оборудованием всех спутников одинаковыми устройствами. По меньшей мере в одном варианте реализации настоящего изобретения определение расстояния между спутниками может быть выполнено как часть "обычного" протокола межспутниковой связи. В одном варианте реализации настоящего изобретения для обеспечения большей экономической эффективности некоторые из спутников могут быть оборудованы GPS-приемниками, выполненными с возможностью очень точно определять время и частоту GPS, а время и частота GPS использованы для калибровки генератора оборудованного таким образом спутника. Таким образом, оборудованные GPS-приемниками спутники обеспечивают прикрепление всех результатов измерений к GPS-времени. Все результаты измерений посредством межспутниковой связи могут быть собраны и отфильтрованы для оценки систематической погрешности и скорости систематической погрешности значения времени для каждого космического аппарата относительно GPS-времени. Эти значения систематической погрешности и скорости систематической погрешности могут быть использованы приемниками на Земле для введения поправок в количество времени для любого космического аппарата относительно GPS-времени. Следует отметить, что вместо использования для синхронизации GPS-сигналов, раскрытые система и способ могут использовать разнообразные средства обеспечения синхронизации, включая, но не ограничиваясь этим, по меньшей мере один сигнал глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере один сигнал спутника Galileo, по меньшей мере один сигнал навигационной системы Бэйдоу и/или атомные часы. Кроме того, следует отметить, что раскрытая система и способ могут быть использованы для различных типов группировок спутников, таких как группировки спутников на низкой околоземной орбите, на геостационарной орбите и/или на средней околоземной орбите.
Вторая основная особенность раскрытых системы и способа относится к вторичным приложениям относительно измерений посредством межспутниковой связи. Что касается этой особенности, то один и тот же набор результатов измерений посредством межспутниковой связи может быть использован операторами группировки для необходимых операций со спутниками, например, для оценки ухода частоты спутниковых генераторов и, при наличии данных о систематической погрешности и скорости систематической погрешности, для выработки команд для регулировки значений спутникового времени и частоты для удержания их в пределах допустимых границ.
Третья основная особенность настоящего изобретения относится к обработке систематической погрешности на орбите для минимизации требований к наземной инфраструктуре. Что касается этой особенности, то обработка результатов измерений времени приема для оценки систематической погрешности и скорости систематической погрешности времени для спутника может быть выполнена распределенным способом среди спутников, соединенных в виде сети посредством межспутниковой связи, для минимизации или полного устранения необходимости наземной обработки и, таким образом, получения оцененных величин без контакта с наземными устройствами.
Четвертая основная особенность раскрытой системы и способа относится к спаренным спутникам, извлекающим выгоду от наличия спутника, закрепленного системой GPS. Эта основная особенность аналогична закрепленному системой GPS спутнику, использующему свою основанную на системе GPS информацию о времени и частоте для синхронизации локального генератора. Что касается этой особенности, то остающиеся спутники могут синхронизировать свои генераторы посредством информации о времени и частоте, оцененной в этой последовательности операций.
Пятая основная особенность раскрытых системы и способа имеет отношение к определению орбиты. Для выполнения этой особенности измерения момента времени приема межспутниковых сигналов и разреженное закрепление с оборудованными системой GPS спутниками использованы для определения орбиты. Измерения момента времени приема межспутниковых сигналов были обработаны, чтобы гарантировать общую временную базу для всех измерений. Измерения посредством межспутниковой связи нечувствительны к относительно небольшим изменениям высоты спутника, поскольку линии визирования для измерений почти перпендикулярны угловой высоте надира. Для извлечения максимальных преимуществ от выполнения измерений точно установленного времени приема изобретение проводит точные измерения времени приема и доплеровские измерения вместе с наземными опорными станциями для оптимальной оценки радиального компонента орбиты.
В последующем описании сформулированы многочисленные подробности, обеспечивающие более полное описание системы. Однако, специалисту в данной области техники очевидно, что раскрытая система может быть выполнена без этих определенных подробностей. В других случаях известные особенности не были описаны подробно, чтобы не затенять излишне систему.
Системы и способы согласно одному варианту реализации или большему количеству вариантов предложены для улучшения основанного на спутнике определения положения, навигации и синхронизации по времени посредством использования межспутниковой связи и источника точного времени для обеспечения точной информации о синхронизации с целью калибровки локального генератора на спаренном спутнике. По меньшей мере в одном варианте реализации настоящего изобретения спаренный спутник может использовать такой подход для проведения типичных орбитальных операций как части протокола межспутниковой связи. По меньшей мере в одном варианте реализации настоящего изобретения более одного канала межспутниковой связи может быть использовано для распределения времени по меньшей мере на два спаренных спутника (например, один спутник посылает информацию на два спутника, один из которых размещен впереди, а другой позади в одной и той же плоскости). По меньшей мере в одном варианте реализации настоящего изобретения точное время на подмножестве спутников, выполненных с возможностью межспутниковой связи, использовано для распределения времени по сети соединенных каналами межспутниковой связи спутников. По меньшей мере в одном варианте реализации настоящего изобретения эта последовательность операций может быть использована для распределения времени по всей группировке. По меньшей мере в одном варианте реализации настоящего изобретения раскрытые способы могут дополнительно быть использованы для определения абсолютных или относительных местоположений точек посредством измерения расстояний для определения орбиты.
В некоторых вариантах реализации настоящего изобретения спаренный спутник может быть использован для передачи сообщения об определении положения, навигации и синхронизации по времени (то есть, о точном положении спутника и информацию о синхронизации) пользователю на Земле таким образом, чтобы они могли улучшить точность по времени или использовать спутниковый сигнал в качестве сигнала определения расстояния. По меньшей мере в одном варианте реализации настоящего изобретения коммуникационные сигналы от по меньшей мере одного спутника на низкой околоземной орбите были приспособлены для обеспечения значений времени и частоты включенным приемникам на Земле с помощью каналов межспутниковых связей и источника точного времени. По меньшей мере в одном варианте реализации настоящего изобретения по меньшей мере один спутник на низкой околоземной орбите представляет собой спутник типа Iridium (то есть, из существующей группировки спутников типа Iridium) и/или спутник типа Iridium следующего поколения.
По меньшей мере в одном варианте реализации настоящего изобретения источник точного времени содержит по меньшей мере один GPS-приемник, установленный на подмножестве спутников на низкой околоземной орбите с возможностью межспутниковой связи в пределах группировки спутников. По меньшей мере в одном варианте реализации настоящего изобретения каналы межспутниковой связи могут соединять по меньшей мере две различные конфигурации спутников с разумной совместимостью межспутниковой связи.
По меньшей мере в одном варианте реализации настоящего изобретения GPS-приемники установлены на подмножестве спутников в пределах группировки на низкой околоземной орбите и использованы для поддержания более точного значения времени на этих спутниках без аналогичного установленного источника времени, такого как GPS-приемник, посредством прохождения информации о синхронизации по соответствующим каналам межспутниковой связи.
В родственных изобретениях было показано, что коммуникационные сигналы от спутника на низкой околоземной орбите могут быть приспособлены для обеспечения значений времени и частоты для включенных приемников на поверхности Земли или около нее, которые расположены в пределах зоны обслуживания спутника. Критическая часть этой последовательности операций связана со знанием времени спутника относительно некоторого стандарта во время передачи сигнала. Время системы GPS представляет собой удобный стандарт времени, однако, оценка времени каждого спутника может потребовать обширной сети станций слежения на Земле, в зависимости от характеристик генератора опорного сигнала на спутнике. Внедрение GPS-приемников на спутники на низкой околоземной орбите обеспечивает наилучшие средства определения положения, скорости и времени на борту спутника. Поскольку орбита достаточно низка, наличие и точность GPS-информации о положении и времени примерно сопоставимы со случаем, в котором GPS-приемник размещен на поверхности Земли. Однако, недостаток для группировки спутников состоит в том, что установка такого приемника на каждом спутнике может быть очень дорогостоящей и, таким образом, может препятствовать реализации, и именно по этой причине во взятом в качестве примера варианте реализации только подмножество группировки содержит это дорогостоящее оборудование, что максимизирует эксплуатационные качества и минимизирует стоимость структуры. Как отмечено выше, соединенные каналами межспутниковой связи спутники также обладают еще одним преимуществом, поскольку они обеспечивают системе возможность работать с меньшим количеством наземных станций слежения, поскольку результаты измерений можно передавать через каналы межспутниковой связи.
Для группировки спутников, таких как спутники типа Iridium с возможностью двунаправленной межспутниковой связи, точные измерения момента времени приема могут быть использованы для оценки значений времени спутников друг относительно друга. Измерения момента времени приема обеспечивают возможность получения данных от том, как генератор локального спутника действует с точки зрения погрешности частоты в зависимости от времени или скорее систематической погрешности по времени относительно системы GPS. По меньшей мере в одном варианте реализации настоящего изобретения измерения момента времени приема с Земли могут быть использованы для определения соотношения между значениями относительного времени и временем системы GPS для плоскости спутников.
На фиг. 1 показана принципиальная схема 100 взятой в качестве примера группировки спутников, которые могут быть использованы раскрытой системой для усовершенствованных синхронизации по времени и передачи значений времени для группировки спутников посредством определения расстояния между спутниками и использования источника точного времени в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения. На этой фигуре пять спутников 110, 120, 130, 140 и 150 показаны на орбите вокруг Земли 160. Спутники 110, 120, 140 и 150 представляют собой спутники типа Iridium на низкой околоземной орбите, а спутник 130 представляет собой спутник типа Iridium следующего поколения на низкой околоземной орбите. Один спутник (спутник 130) из этих пяти спутников оборудован GPS-приемником для получения GPS-сигналов от GPS-спутника (не показан). Как таковой, этот спутник 130 называют синхронизирующим спутником. Остальные четыре спутника (спутники 110, 120, 140 и 150) из этих пяти спутников не оборудованы GPS-приемниками и, таким образом, их называют несинхронизирующими спутниками. Эти пять спутников передают сигналы межспутниковой связи на соседствующие с ними спутники в группировке и принимают такие сигналы от них. Например, как показано, спутник 130 передает сигналы межспутниковой связи на спутники 110, 120 и 140 и принимает такие сигналы от них.
На фиг. 2 показана принципиальная схема 200 раскрытой системы для усовершенствованных синхронизации по времени и передачи значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения. На этой фигуре по меньшей мере один GPS-спутник 210, как показано, передает GPS-сигнал 215 на первый спутник типа Iridium (Спутник 1) 220. GPS-сигнал 215 содержит точную информацию о времени и, при необходимости, эфемеридные данные. Спутник 1 (220), представляющий собой спутник типа Iridium следующего поколения на низкой околоземной орбите, оборудован GPS-приемником и, таким образом, выполнен с возможностью получать GPS-сигнал 215. Спутник 1 (220) подает информацию о GPS-времени, полученную им из GPS-сигнала 215, в операционный центр 250 и, при необходимости, в некоторых вариантах реализации настоящего изобретения подстраивает свой бортовой генератор к GPS-времени. Поскольку спутник 1 (220) в состоянии получить точную информацию о времени, спутник 1 (220) назван "синхронизирующим спутником". Следует отметить, что в других вариантах реализации настоящего изобретения синхронизирующий спутник может быть выполнен с возможностью получать точную информацию о времени от средств, отличных от GPS-сигнала, например, от атомных часов.
Спутник 1 (220) также показан передающим первый сигнал 225 межспутниковой связи в К- полосе на другой спутник типа Iridium (Спутник 2) 230. Первый сигнал 225 межспутниковой связи в К-полосе содержит информацию о точном времени. В отличие от спутника 1 (220) Спутник 2 (230), представляющий собой спутник типа Iridium на низкой околоземной орбите, не оборудован GPS-приемником и не имеет информации о точном времени. Как таковой, спутник 2 (230) назван "несинхронизирующим спутником". После приема спутником 2 (230) первого сигнала 225 межспутниковой связи в К-полосе спутник 2 (230) посылает второй сигнал 226 межспутниковой связи в К-полосе на спутник 1 (220). После приема спутником 1 (220) второго сигнала 226 межспутниковой связи в К-полосе от спутника 2 (230) спутник 1 (220) посылает сигнал 227 определения расстояния посредством межспутниковой связи в К-полосе на спутник 2 (230). Сигнал 227 определения расстояния посредством межспутниковой связи в К-полосе содержит данные об определении расстояния посредством межспутниковой связи (например, величину промежутка времени, прошедшего от момента передачи первого сигнала 225 межспутниковой связи в К-полосе до момента приема первого сигнала 225 межспутниковой связи в К-полосе, и величину промежутка времени, прошедшего от момента передачи второго сигнала 226 межспутниковой связи в К-полосе до момента приема второго сигнала 226 межспутниковой связи в К-полосе), а также информацию о точном времени, полученную спутником 1 (220) на основании GPS-сигнала 215. Спутник 2 (230) затем передает сигнал 235 с помощью беспроводных технологий и, при необходимости, по проводам на наземный операционный центр 250 через наземную фидерную связь 240. Сигнал 235 содержит данные об определении расстояния между спутниками и информацию о точном времени.
При приеме сигнала 235 наземным операционным центром 250 по меньшей мере один процессор в наземном операционном центре 250 вычисляет результат измерения посредством межспутниковой связи расстояния от спутника 1 (220) до спутника 2 (230) при использовании значения времени, прошедшего от момента передачи первого сигнала 225 межспутниковой связи в К-полосе до момента приема первого сигнала 225 межспутниковой связи в К-полосе, и/или при использовании значения времени, прошедшего от момента передачи второго сигнала 226 межспутниковой связи в К-полосе до момента приема второго сигнала 226 межспутниковой связи в К-полосе. Кроме того, по меньшей мере один процессор в наземном операционном центре 250 вычисляет оценку времени и частоты для спутника 1 (220) и спутника 2 (230) друг относительно друга и относительно GPS-времени (то есть, точного времени) с целью синхронизации времени и частоты для спутника 1 и спутника 2 при использовании результата измерения расстояния между спутниками и информации о точном времени, которая была получена спутником 1 (220) из GPS-сигнала 21.
В некоторых вариантах реализации настоящего изобретения спутник 1 (220) при необходимости посылает первый сигнал 255 позиционирования в L-полосе на наземную опорную станцию 260. После приема опорной станцией 260 первого сигнала 255 позиционирования в L-полосе опорная станция 260 посылает второй сигнал 256 позиционирования в L-полосе на спутник 1 (220). После приема спутником 1 (220) второго сигнала 256 позиционирования в L-полосе от опорной станции 260 спутник 1 (220) посылает сигнал 257 определения расстояния посредством межспутниковой связи в L-полосе на опорную станцию 260. Сигнал 257 определения расстояния посредством межспутниковой связи в L-полосе содержит данные о радиальной дальности (например, количество времени, прошедшее от момента передачи первого сигнала 255 позиционирования в L-полосе до момента приема первого сигнала 255 позиционирования в L-полосе, и количество времени, прошедшее от момента передачи второго сигнала 256 позиционирования в L-полосе до момента приема второго сигнала 256 позиционирования в L-полосе); информацию о точном времени и эфемеридные данные, полученные спутником 1 (220) из GPS-сигнала 215; и, при необходимости, данные об определении расстояния между спутниками (например, количество времени, прошедшее от момента передачи первого сигнала 225 межспутниковой связи в К-полосе до момента приема первого сигнала 225 межспутниковой связи в К- полосе, и количество времени, прошедшее от момента передачи второго сигнала 226 межспутниковой связи в К-полосе до момента приема второго сигнала 226 межспутниковой связи в К-полосе). Затем опорная станция 260 передает сигнал 265, или с помощью беспроводных технологий и/или по проводам, в наземный операционный центр 250. Сигнал 265 содержит данные о радиальной дальности, информацию о точном времени, эфемеридные данные и, при необходимости, данные об определении расстояния между спутниками.
После приема наземным операционным центром 250 сигнала 265 по меньшей мере один процессор в наземном операционном центре 250 вычисляет результат радиального измерения расстояния от спутника 1 (220) до опорной станции 260 при использовании значения времени, прошедшего от момента передачи первого сигнала 255 позиционирования в L-полосе до момента приема первого сигнала 255 позиционирования в L-полосе, и/или значения времени, прошедшего от момента передачи второго сигнала 256 позиционирования в L-полосе до момента приема второго сигнала 256 позиционирования в L-полосе. Кроме того, по меньшей мере один процессор в наземном операционном центре 250 проводит оценку орбитального позиционирования для спутника 1 (220) и/или спутника 2 (230) при использовании результата измерения расстояния посредством межспутниковой связи, информации о точном времени, эфемеридных данных и результата измерения радиального расстояния.
Следует отметить, что в альтернативных вариантах реализации настоящего изобретения определение расстояния между спутниками может быть лишь однонаправленным позиционированием вместо двунаправленного позиционирования, показанного на фиг. 2. Кроме того, в других вариантах реализации настоящего изобретения радиальное позиционирование может быть однонаправленным позиционированием (или посредством передачи сигнала с Земли на спутник или посредством передачи сигнала со спутника на Землю) вместо двунаправленного позиционирования, показанного на фиг.2. Кроме того, следует отметить, что в некоторых вариантах реализации настоящего изобретения, и в случае сценария с однонаправленным позиционированием и в случае сценария с двунаправленным позиционированием, спутник, посылающий первый сигнал определения расстояния между спутниками, представляет собой синхронизирующий спутник, а спутник, принимающий первый сигнал определения расстояния между спутниками, представляет собой несинхронизирующий спутник, как это имеет место на фиг. 2. В других вариантах реализации настоящего изобретения, и в случае сценария с однонаправленным позиционированием и в случае сценария с двунаправленным позиционированием, спутник, посылающий первый сигнал определения расстояния между спутниками, представляет собой несинхронизирующий спутник, а спутник, принимающий первый сигнал определения расстояния между спутниками, представляет собой синхронизирующий спутник. Кроме того, следует отметить, что для раскрытых системы и способа могут иметь место различные другие комбинации, в рамках которых некоторые спутники в группировке представляют собой синхронизирующие спутники, а другие представляют собой несинхронизирующие спутники.
Кроме того, следует отметить, что в некоторых вариантах реализации настоящего изобретения по меньшей мере один процессор, предназначенный для выполнения вычислений, расположен на спутнике, а не на наземной станции (то есть, на Земле), например, в наземном операционном центре 250. Также, из этого следует, что данные, необходимые по меньшей мере одному процессору для выполнения вычислений, могут быть переданы по меньшей мере одному процессору всевозможными маршрутами, которые могут быть беспроволочными и/или проводными. Кроме того, следует отметить, что сигналы межспутниковой связи и сигналы радиального позиционирования могут быть переданы на других частотах, отличных от К-полосы и L-полосы. Кроме того, в одном или более вариантов реализации настоящего изобретения раскрытые система и способ не используют фидерную связь для передачи сигналов. По меньшей мере в одном варианте реализации настоящего изобретения раскрытые система и способ используют более одного фидерного канала для передачи сигналов. Кроме того, следует отметить, что в других вариантах реализации настоящего изобретения синхронизирующий спутник может получить свою информацию о синхронизации от по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала спутника Galileo, по меньшей мере одного сигнала навигационной системы Бэйдоу и/или от атомных часов. Для реализации этих вариантов синхронизирующий спутник должен быть оборудован приемником ГЛОНАСС, приемником Galileo и/или приемником Бэйдоу для приема сигналов ГЛОНАСС, сигналов спутника Galileo и/или сигналов Бэйдоу, соответственно. Кроме того, следует отметить, что в некоторых вариантах реализации настоящего изобретения информация о синхронизации не представляет собой точное время, а синхронизирующий спутник может просто получить информацию о синхронизации от своего собственного внутреннего генератора.
На фиг. 3 показана блок-схема раскрытого способа 300, предназначенного для усовершенствованных синхронизация по времени и передачи значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения. После старта этого способа 300 на стадии 310 по меньшей мере один первый спутник передает по меньшей мере один сигнал определения расстояния между спутниками по меньшей мере на один второй спутник (стадия 320). В одном или более вариантов реализации настоящего изобретения по меньшей мере один первый спутник и/или по меньшей мере один второй спутнике представляет собой синхронизирующий спутник со временем синхронизации (например, GPS-временем), а второй(-ые) спутник(-и) принимает(-ют) сигнал(-ы) определения расстояния между спутниками от первого(-ых) спутника(-ов) (стадия 330).
После приема вторым(-и) спутником(-ами) сигнала(-ов) определения расстояния между спутниками по меньшей мере один процессор вычисляет по меньшей мере один результат измерения расстояния от первого(-ых) спутников) до второго(-ых) спутника(-ов) при использовании значения времени, прошедшего от момента передачи сигнала(-ов) определения расстояния между спутниками до момента приема сигнала(-ов) определения расстояния между спутниками (стадия 340). Затем по меньшей мере один процессор вычисляет оценку времени и частоты для первого(-ых) спутника(-ов) и второго(-ых) спутника(-ов) друг относительно друга и в сравнении со временем синхронизации с целью синхронизации времени и частоты для первого(-ых) спутника(-ов) и/или второго(-ых) спутника(-ов) при использовании по меньшей мере одного результата измерения расстояния и времени синхронизации (стадия 350). После вычисления по меньшей мере одним процессором оценки времени и частоты происходит окончание последовательности операций (стадия 360).
На фиг. 4 показана блок-схема для детализованного способа 400 синхронизации времени посредством определение расстояния между спутниками и использования эталонных часов наземной станции в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения. После старта этого способа 400 на стадии 410 наземные средства управления подстраивают значения времени и частоты космического аппарата (например, спутника типа Iridium) до приблизительно соответствия GPS-времени и получения минимального дрейфа (стадия 420). На этой стадии 420 наземные средства управления оценивают значения времени, частоты и орбиту космического аппарата при прохождении каждой наземной станции (например, наземной станции телеметрии, отслеживания и контроля/команд). Наземная станция затем использует эти данные для выработки команд, предназначенных для регулировки времени и частоты космического аппарата по прошествии определенных или различных временных интервалов (например, она вырабатывает команды приблизительно каждые 12 часов). Затем космический аппарат регулирует свои часы данных (то есть, времени) и свой генератор задающей частоты в соответствии с командами. Регулировка часов данных происходит по нескольким блокам L-полосы, чтобы не мешать другим услугам.
После проведения регулировки значений времени и частоты для каждого космического аппарата все космические аппараты вычисляют момент времени приема последовательности сообщений межспутниковой связи в L-полосе на всех активных каналах межспутниковой связи (стадия 430). Момент времени приема основан на корректировке, внесенной часами данных приемника межспутниковой связи на космическом аппарате для поддержания синхронизации данных.
После вычисления значений времени приема всеми космическими аппаратами все космические аппараты посылают свои результаты измерения момента времени приема посредством межспутниковой связи на Землю для обработки (стадия 440). Результаты измерения момента времени приема могут представлять собой необработанные результаты измерений или быть представлены посредством подбора кривой. После того, как все космические аппараты послали результаты измерения момента времени приема посредством межспутниковой связи на Землю, наземный приемник, следящий за космическим аппаратом типа Iridium, проводит измерения момента времени приема и допплеровские измерения относительно GPS-времени (стадия 450). Для выполнения этой стадии 450 наземный приемник имеет общий стандарт частоты, управляющий и GPS-приемником и приемником спутника Iridium. Результаты измерений момента времени приема и допплеровских измерений связаны с GPS-временем.
После проведения измерений наземным приемником средства наземной обработки проводят оценку систематической погрешности часов и дрейфа часов относительно GPS-времени для всех космических аппаратов (стадия 460). Обновленное значение скорости основано на скорости момента времени приема, для которого канал межспутниковой связи космического аппарата соответствует квадратному выражению. Средства централизованной обработки используют эфемеридные данные о спутнике типа Iridium для вычисления значений времени полета для всех контактов между космическими аппаратами и контактов космических аппаратов с Землей, для которых есть данные о моменте времени приема. Затем средства централизованной обработки удаляют значения времени полета из значений измерений. Средства централизованной обработки затем оценивают систематическую погрешность и дрейф часов космических аппаратов друг относительно друга, привязывая эти значения к GPS-времени при наличии данных слежения наземным приемником.
После проведения оценок средствами наземной обработки значения систематической погрешности и дрейфа часов использованы для получения поправочных членов для часов космического аппарата типа Iridium (стадия 470). После получения этих поправочных членов способ 400 окончен (стадия 480).
На фиг. 5 показана блок-схема для детализованного способа 500 синхронизации времени посредством определение расстояния между спутниками и использования по меньшей мере одного спутника типа Iridium, оборудованного GPS-приемником, в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения. После старта этого способа 500 на стадии 510 наземные средства управления подстраивают значения времени и частоты космического аппарата (например, спутника типа Iridium) до приблизительно соответствия GPS-времени и получения минимального дрейфа (стадия 520). На этой стадии 520 наземные средства управления оценивают значения времени, частоты и орбиту космического аппарата при прохождении каждой наземной станции (например, наземной станции телеметрии, отслеживания и контроля/команд). Наземная станция затем использует эти данные для выработки команд, предназначенных для регулировки времени и частоты космического аппарата по прошествии определенных или различных временных интервалов (например, она вырабатывает команды приблизительно каждые 12 часов). Затем космический аппарат регулирует свои часы данных (то есть, времени) и свой генератор задающей частоты в соответствии с командами. Регулировка часов данных происходит по нескольким блокам L-полосы, чтобы не мешать другим услугам.
После проведения регулировки значений времени и частоты для каждого космического аппарата каждый космический аппарат, оборудованный GPS-приемниками, управляемыми генератором частоты космического аппарата, определяет свое положение, скорость и время, и вычисляет свою систематическую погрешность и дрейф часов генератора относительно GPS-времени (стадия 530). Затем все космические аппараты вычисляют момент времени приема последовательности сообщений межспутниковой связи в К-полосе на всех активных каналах межспутниковой связи (стадия 540). Момент времени приема основан на корректировке, внесенной часами данных приемника межспутниковой связи на космическом аппарате для поддержания синхронизации данных.
После вычисления значений времени приема всеми космическими аппаратами все космические аппараты посылают свои результаты измерения момента времени приема посредством межспутниковой связи на Землю для обработки (стадия 550). Результаты измерения момента времени приема могут представлять собой необработанные результаты измерений или быть представлены посредством подбора кривой. Космические аппараты, оборудованные GPS-приемниками, посылают свои рассчитанные значения систематической погрешности и дрейфа часов на Землю для обработки.
После того, как все космические аппараты послали результаты измерения момента времени приема на Землю, средства наземной обработки проводят оценку систематической погрешности часов и дрейфа часов относительно GPS-времени для всех космических аппаратов (стадия 560). Средства централизованной обработки используют эфемеридные данные о спутнике типа Iridium для вычисления значений времени полета для всех контактов между космическими аппаратами и контактов космических аппаратов с Землей, для которых есть данные о моменте времени приема. Затем средства централизованной обработки удаляют значения времени полета из значений измерений. Средства централизованной обработки затем оценивают систематическую погрешность и дрейф часов космических аппаратов друг относительно друга, привязывая эти значения к GPS-времени посредством использования результатов основанных на системе GPS измерений систематической погрешности и дрейфа часов генератора космического аппарата.
После проведения оценок средствами наземной обработки значения систематической погрешности и дрейфа часов использованы для получения поправочных членов для часов космического аппарата типа Iridium (стадия 570). После получения этих поправочных членов способ 500 окончен (стадия 580).
На фиг. 6 показана блок-схема для детализованного способа 600 синхронизации времени и определения орбиты посредством определения расстояния между спутниками и использования измерений момента времени приема на Земле для оценки эфемериды группировки спутников типа Iridium в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения. После старта этого способа 600 на стадии 610 наземные средства управления подстраивают значения времени и частоты космического аппарата (например, спутника типа Iridium) до приблизительно соответствия GPS-времени и получения минимального дрейфа (стадия 620). На этой стадии 620 наземные средства управления оценивают значения времени, частоты и орбиту космического аппарата при прохождении каждой наземной станции (например, наземной станции телеметрии, отслеживания и контроля/команд). Наземная станция затем использует эти данные для выработки команд, предназначенных для регулировки времени и частоты космического аппарата по прошествии определенных или различных временных интервалов (например, она вырабатывает команды приблизительно каждые 12 часов Затем космический аппарат регулирует свои часы данных (то есть, времени) и свой генератор задающей частоты в соответствии с командами. Регулировка часов данных происходит по нескольким блокам L-полосы, чтобы не мешать другим услугам.
После проведения регулировки значений времени и частоты для каждого космического аппарата, каждый космический аппарат, оборудованный GPS-приемниками, управляемыми генератором частоты космического аппарата, определяет свое положение, скорость и время, и вычисляет свою систематическую погрешность и дрейф часов генератора относительно GPS-времени (стадия 630). Затем все космические аппараты вычисляют момент времени приема последовательности сообщений межспутниковой связи в К-полосе на всех активных каналах межспутниковой связи (стадия 640). Момент времени приема основан на корректировке, внесенной часами данных приемника межспутниковой связи на космическом аппарате для поддержания синхронизации данных.
После вычисления значений времени приема всеми космическими аппаратами все космические аппараты посылают свои результаты измерения момента времени приема посредством межспутниковой связи на Землю для обработки (стадия 650). Результаты измерения момента времени приема могут представлять собой необработанные результаты измерений или быть представлены посредством подбора кривой. Космические аппараты, оборудованные GPS-приемниками, посылают свои рассчитанные значения систематической погрешности и дрейфа часов на Землю для обработки.
После того, как все космические аппараты послали результаты измерения момента времени приема посредством межспутниковой связи на Землю, наземный приемник, следящий за космическим аппаратом типа Iridium, проводит измерения момента времени приема и допплеровские измерения относительно GPS-времени (стадия 660). Для выполнения этой стадии 450 наземный приемник имеет общий стандарт частоты, управляющий и GPS-приемником и приемником типа Iridium. Результаты измерений момента времени приема и допплеровских измерений связаны с GPS-временем.
После проведения измерений наземным приемником средства наземной обработки проводят оценку систематической погрешности часов и дрейфа часов относительно GPS-времени для всех космических аппаратов (стадия 670). Средства централизованной обработки используют эфемеридные данные о спутнике типа Iridium для вычисления значений времени полета для всех контактов между космическими аппаратами и контактов космических аппаратов с Землей, для которых есть данные о моменте времени приема. Затем средства централизованной обработки удаляют значения времени полета из значений измерений. Средства централизованной обработки затем оценивают систематическую погрешность и дрейф часов космических аппаратов друг относительно друга, привязывая эти значения к GPS-времени посредством использования результатов основанных на GPS измерений систематической погрешности и дрейфа часов генератора космического аппарата типа Iridium.
После проведения оценок средствами наземной обработки средства наземной обработки обновляют оценки орбиты космического аппарата типа Iridium, используя измерения моментов времени приема посредством каналов связи между спутниками и каналов связи (то есть радиальных каналов) от спутников на Землю (стадия 680). Затем оценки систематической погрешности и дрейфа часов космического аппарата типа Iridium использованы для получения поправочных членов для часов космического аппарата типа Iridium (стадия 685). После получения этих поправочных членов оценки орбиты космического аппарата типа Iridium использованы для получения эфемериды космического аппарата (стадия 690). После получения эфемериды космического аппарата способ 600 окончен (стадия 695).
На фиг. 7 показан график, отражающий точность, достижимую при измерении расстояния между спутниками, в соответствии по меньшей мере с одним вариантом реализации настоящего изобретения. Этот график показывает ошибку по дальности (вертикальная шкала, в метрах (м)) в зависимости от времени (горизонтальная шкала, в секундах (с)). Эта точность обеспечивает точность синхронизации по времени для одного канала межспутниковой связи примерно в 20 наносекунд и точность определения дальности примерно в 6 метров. Вся сеть спутников типа Iridium, как ожидают, будет иметь ошибку синхронизации меньше 40 наносекунд и ошибки по дальности меньше 12 метров. Дополнительные измерения могут быть проведены для дальнейшего уменьшения этих ошибок.
Хотя здесь были описаны определенные взятые в качестве примера варианты реализации и способы, на основании предшествующего раскрытия специалистам в данной области техники должно быть очевидно, что изменения и модификации таких вариантов реализации и способов могут быть внесены без отступления от сути и объема раскрытого изобретения. Существует много других примеров раскрытого изобретения, каждый из которых отличен от других лишь деталями. Соответственно, следует иметь ввиду, что раскрытое изобретение должно быть ограничено лишь в степени, определяемой приложенными пунктами формулы изобретения и принципами действующего законодательства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБЫ И УСТРОЙСТВА ДЛЯ НАВИГАЦИОННОЙ СИСТЕМЫ С ПОНИЖЕННОЙ ВОСПРИИМЧИВОСТЬЮ К НЕПРЕДНАМЕРЕННЫМ И ПРЕДНАМЕРЕННЫМ ПОМЕХАМ | 2006 |
|
RU2419804C2 |
| НИЗКООРБИТАЛЬНАЯ СИСТЕМА СПУТНИКОВОЙ СВЯЗИ | 2011 |
|
RU2496233C2 |
| СПОСОБ ФОРМИРОВАНИЯ ГРУППИРОВКИ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ ДЛЯ МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ УГРОЗ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ В РЕЖИМЕ, БЛИЗКОМ К РЕАЛЬНОМУ ВРЕМЕНИ | 2018 |
|
RU2711554C1 |
| УНИВЕРСАЛЬНАЯ ВЫСОКОЭФФЕКТИВНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2007 |
|
RU2428714C2 |
| Глобальная многофункциональная инфокоммуникационная спутниковая система | 2017 |
|
RU2660113C1 |
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |
| СПОСОБ ФОРМИРОВАНИЯ ИНФОРМАЦИОННОГО ПРОСТРАНСТВЕННО-ВРЕМЕННОГО ПОЛЯ | 2009 |
|
RU2492517C2 |
| СИСТЕМА СВЯЗИ, ОСНОВАННАЯ НА ГРУППИРОВКЕ НИЗКООРБИТАЛЬНЫХ СПУТНИКОВ ЗЕМЛИ И ПОЗВОЛЯЮЩАЯ МНОГОКРАТНО ИСПОЛЬЗОВАТЬ ЧАСТОТНЫЙ СПЕКТР ГЕОСТАЦИОНАРНЫХ СПУТНИКОВ | 2017 |
|
RU2730169C2 |
| СПОСОБ И СИСТЕМА ГЕОЛОКАЛИЗАЦИИ РАДИОМАЯКА В СИСТЕМЕ ТРЕВОЖНОГО ОПОВЕЩЕНИЯ И СПАСЕНИЯ | 2011 |
|
RU2590903C2 |
| Применение триангуляционных методов измерений в системе ГЛОНАСС. | 2015 |
|
RU2669042C2 |
Изобретение относится к области радиосвязи. Техническим результатом заявленного изобретения является улучшение основанного на спутнике определения положения, навигации и синхронизации по времени посредством использования межспутниковой связи и источника точного времени для обеспечения точной информации о синхронизации с целью калибровки локального генератора на спаренном спутнике. Раскрыты система, способ и устройство для усовершенствованных синхронизации по времени и передачи значений времени для группировок спутников посредством определения расстояния между спутниками и использования источника точного времени. По меньшей мере в одном варианте реализации настоящего изобретения синхронизация времени на подмножестве спутников с возможностями межспутниковой связи использована для распределения значения времени по сети спутников, соединенных каналами межспутниковой связи. 2 н. и 16 з.п. ф-лы, 7 ил.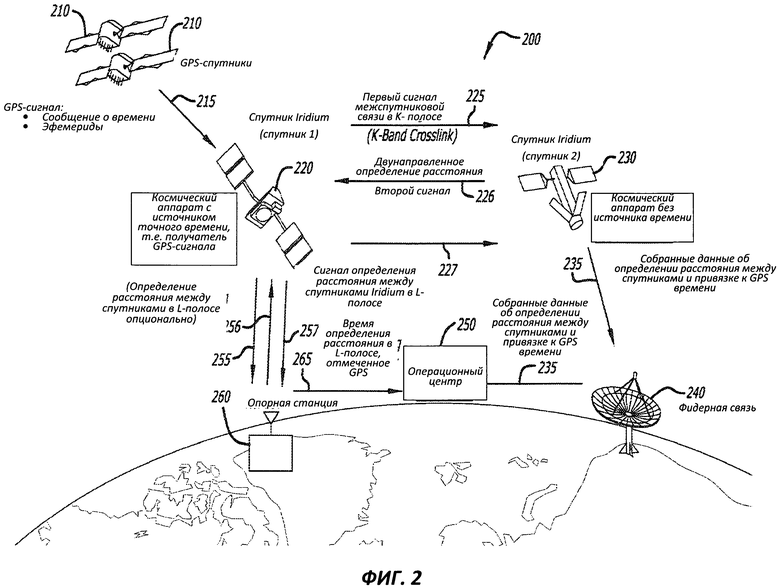
1. Способ синхронизации по времени для группировки спутников, включающий:
передачу, по меньшей мере одним первым спутником, по меньшей мере одного сигнала определения расстояния между спутниками по меньшей мере на один второй спутник, причем по меньшей мере один спутник из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника представляет собой синхронизирующий спутник со временем синхронизации,
прием, по меньшей мере одним вторым спутником, по меньшей мере одного сигнала определения расстояния между спутниками,
вычисление по меньшей мере одного результата измерения расстояния от по меньшей мере одного первого спутника до по меньшей мере одного второго спутника посредством использования значения времени, прошедшего от момента передачи по меньшей мере одного сигнала определения расстояния между спутниками до момента приема по меньшей мере одного сигнала определения расстояния между спутниками,
и
вычисление оценки времени и частоты для по меньшей мере одного первого спутника и по меньшей мере одного второго спутника относительно друг друга и относительно времени синхронизации с целью синхронизации времени и частоты для по меньшей мере одного спутника из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника при использовании по меньшей мере одного параметра из по меньшей мере одного результата измерения расстояния и времени синхронизации от по меньшей мере одного синхронизирующего спутника, и
вычисление оценки орбитального позиционирования для по меньшей мере одного спутника из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника при использовании по меньшей мере одного результата измерения расстояния, времени синхронизации, данных позиционирования от по меньшей мере одного синхронизирующего спутника и по меньшей мере одного результата измерения позиционного расстояния.
2. Способ по п. 1, в котором
по меньшей мере один первый спутник представляет собой синхронизирующий спутник со временем синхронизации, и
по меньшей мере один второй спутник представляет собой несинхронизирующий спутник без времени синхронизации.
3. Способ по п. 1, в котором
по меньшей мере один синхронизирующий спутник принимает время синхронизации посредством по меньшей мере одного сигнала из по меньшей мере одного сигнала глобальной навигационной системы GPS, по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала спутника Galileo, по меньшей мере одного сигнала навигационной системы Бэйдоу и посредством атомных часов.
4. Способ по п. 1, в котором
по меньшей мере один второй спутник представляет собой синхронизирующий спутник со временем синхронизации, и
по меньшей мере один первый спутник представляет собой несинхронизирующий спутник без времени синхронизации
5. Способ по п. 1, включающий
выработку по меньшей мере одного сигнала коррекции для синхронизации времени и частоты для по меньшей мере одного спутника из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника и
передачу по меньшей мере одного сигнала коррекции на по меньшей мере один спутник из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника.
6. Способ по п. 1, включающий
передачу, по меньшей мере одним синхронизирующим спутником, по меньшей мере одного сигнала позиционирования по меньшей мере на одну опорную станцию,
прием, по меньшей мере одной опорной станцией, по меньшей мере одного сигнала позиционирования,
вычисление по меньшей мере одного результата измерения позиционного расстояния от по меньшей мере одного синхронизирующего спутника до по меньшей мере одной опорной станции при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования.
7. Способ по п. 1, включающий
передачу, по меньшей мере одной опорной станцией, по меньшей мере одного сигнала позиционирования по меньшей мере на один синхронизирующий спутник,
прием, по меньшей мере одним синхронизирующим спутником, по меньшей мере одного сигнала позиционирования,
вычисление по меньшей мере одного результата измерения позиционного расстояния по меньшей мере от одной опорной станции до по меньшей мере одного синхронизирующего спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования.
8. Способ по любому из пп. 6 или 7, в котором
по меньшей мере один синхронизирующий спутник принимает данные о расположении посредством по меньшей мере одного сигнала из по меньшей мере одного сигнала глобальной навигационной системы GPS, по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала навигационной системы Бэйдоу и по меньшей мере одного сигнала спутника Galileo.
9. Система синхронизации по времени для группировки спутников, содержащая
- по меньшей мере один первый спутник, выполненный с возможностью передачи по меньшей мере одного сигнала определения расстояния между спутниками на по меньшей мере один второй спутник, при этом
по меньшей мере один второй спутник выполнен с возможностью получения по меньшей мере одного сигнала определения расстояния между спутниками, причем
по меньшей мере один спутник из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника представляет собой синхронизирующий спутник со временем синхронизации,
- по меньшей мере один процессор, выполненный с возможностью вычисления по меньшей мере одного результата измерения расстояния от по меньшей мере одного первого спутника до по меньшей мере одного второго спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала определения расстояния между спутниками до момента приема по меньшей мере одного сигнала определения расстояния между спутниками, при этом
по меньшей мере один процессор выполнен с дополнительной возможностью вычисления оценки времени и частоты для по меньшей мере одного первого спутника и по меньшей мере одного второго спутника друг относительно друга с целью синхронизации времени и частоты для по меньшей мере одного спутника из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника при использовании по меньшей мере одного параметра из по меньшей мере одного результата измерения расстояния и времени синхронизации от по меньшей мере одного синхронизирующего спутника, и
вычисления оценки орбитального позиционирования для по меньшей мере одного спутника из одного первого спутника и по меньшей мере одного второго спутника посредством использования по меньшей мере одного результата измерения расстояния, времени синхронизации, данных позиционирования от по меньшей мере одного синхронизирующего спутника и по меньшей мере данных одного определения позиционного расстояния.
10. Система по п. 9, в которой
по меньшей мере один первый спутник представляет собой синхронизирующий спутник со временем синхронизации, и
по меньшей мере один второй спутник представляет собой несинхронизирующий спутник без времени синхронизации.
11. Система по п. 9, в которой
по меньшей мере один второй спутник представляет собой синхронизирующий спутник со временем синхронизации, и
по меньшей мере один первый спутник представляет собой несинхронизирующий спутник без времени синхронизации.
12. Система по п. 9, в которой
по меньшей мере один процессор выполнен с дополнительной возможностью выработки по меньшей мере одного сигнала коррекции для синхронизации времени и частоты для по меньшей мере одного спутника из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника.
13. Система по п. 12, содержащая по меньшей мере одно передающее устройство, выполненное с возможностью передачи по меньшей мере одного сигнала коррекции по меньшей мере на один спутник из по меньшей мере одного первого спутника и по меньшей мере одного второго спутника.
14. Система по п. 9, в которой
по меньшей мере один первый спутник и по меньшей мере один второй спутник представляют собой по меньшей мере один спутник из спутника на низкой околоземной орбите, спутника на средней околоземной орбите и спутника на геостационарной орбите.
15. Система по п. 9, в которой
по меньшей мере один синхронизирующий спутник выполнен с дополнительной возможностью передачи по меньшей мере одного сигнала позиционирования по меньшей мере на одну опорную станцию,
по меньшей мере одна опорная станция выполнена с возможностью получения по меньшей мере одного сигнала позиционирования, и
по меньшей мере один процессор выполнен с дополнительной возможностью вычисления по меньшей мере одного результата измерения позиционного расстояния от по меньшей мере одного синхронизирующего спутника до по меньшей мере одной опорной станции при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования.
16. Система по п. 15, в которой
по меньшей мере один синхронизирующий спутник принимает данные о расположении посредством по меньшей мере одного сигнала из по меньшей мере одного сигнала глобальной навигационной системы GPS, по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала навигационной системы Бэйдоу и по меньшей мере одного сигнала спутника Galileo.
17. Система по п. 9, дополнительно содержащая
по меньшей мере одну опорную станцию, выполненную с возможностью передачи по меньшей мере одного сигнала позиционирования по меньшей мере на один синхронизирующий спутник, при этом
по меньшей мере один синхронизирующий спутник выполнен с дополнительной возможностью приема по меньшей мере одного сигнала на запрос позиционирования, а по меньшей мере один процессор выполнен с дополнительной возможностью вычисления по меньшей мере одного результата измерения позиционного расстояния от по меньшей мере одной опорной станции до по меньшей мере одного синхронизирующего спутника при использовании значения времени, прошедшего от момента передачи по меньшей мере одного сигнала позиционирования до момента приема по меньшей мере одного сигнала позиционирования.
18. Система по любому из пп. 15 или 17, в которой
по меньшей мере один синхронизирующий спутник принимает данные о расположении посредством по меньшей мере одного сигнала из по меньшей мере одного сигнала глобальной навигационной системы GPS, по меньшей мере одного сигнала глобальной навигационной спутниковой системы ГЛОНАСС, по меньшей мере одного сигнала навигационной системы Бэйдоу и по меньшей мере одного сигнала спутника Galileo.
| US 5490076 A, 06.02.1996 | |||
| US 5506781 A, 09.04.1996 | |||
| US 2007155318 A1, 05.07.2007 | |||
| US 6133870 A, 17.10.2000 | |||
| CN 101833103 A, 15.09.2010 | |||
| СПОСОБ ЭФЕМЕРИДНОГО ОБЕСПЕЧЕНИЯ ПРОЦЕССА УПРАВЛЕНИЯ КОСМИЧЕСКИМИ АППАРАТАМИ ГЛОБАЛЬНОЙ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2009 |
|
RU2390730C1 |

