Настоящее изобретение касается способа и системы геолокализации радиомаяка посредством использования информации, передаваемой внутри системы тревожного оповещения, связанной с этим маяком.
Система тревожного оповещения, называемая также поисково-спасательной системой, известной под англо-саксонским сокращением SAR “Search and Rescue”, состоит из одной или нескольких группировок спутников, которые принимают по восходящему каналу связи тревожный сигнал, передаваемый радиомаяком. Этот сигнал передается на международной частоте подачи сигнала бедствия. Тревожный сигнал ретранслируется на наземную станцию, которая извлекает из него информацию о бедствии, которую затем направляет в центр контроля полетов.
Известной системой тревожного оповещения SAR является всемирная система Cospas-Sarsat, основным назначением которой является обнаружение терпящих бедствие судов, самолетов или людей. В частности, система Cospas-Sarsat использует низкоорбитальную спутниковую группировку, называемую LEOSAR (“Low-Earth Orbit Search and Rescue”), для приема и передачи на наземную станцию тревожных сообщений.
Задачей системы тревожного оповещения является также локализация радиомаяка, передающего сообщение бедствия. В этой связи использование низкоорбитальных спутников обеспечивает локализацию за счет эффекта Доплера-Физо. Единственный спутник использует информацию на входящей частоте тревожного сообщения в несколько последовательных моментов, датируемых во время его перемещения. Поскольку каждый раз частота принимаемого сигнала является разной, на основании этого можно определить положение радиомаяка.
Однако основным недостатком локализации с применением эффекта Доплера-Физо является длительное время локализации, так как один единственный спутник должен производить несколько последовательных измерений во время своего перемещения, чтобы на их основании можно было вывести положение радиомаяка. Кроме того, частотные измерения не имеют достаточной точности для случаев применения, требующих очень точного позиционирования. Наконец, чтобы обеспечивать достаточную относительную скорость, измерение Доплера-Физо в основном применяют для низкоорбитальных спутников, что характеризуется рядом недостатков: срок службы этих спутников является небольшим, и степень охвата для группировок небольшого размера тоже является небольшой (как правило, порядка 35% для 6 спутников).
Усовершенствование системы Cospas-Sarsat состоит в использовании новой спутниковой группировки, называемой MEOSAR (“Medium-Earth Orbit Search and Rescue”), на более высокой орбите. Эти спутники выводят на орбиту, в основном используемую спутниками геолокализации GNSS (“Global Navigation Satellite System”), такими как спутники систем GPS или GALLILEO. Эта орбита известна под названием МЕО (“Medium-Earth Orbit”) и соответствует области пространства от 2000 км до 35000 км. Таким образом, на одном и том же спутнике можно использовать функции тревожного оповещения SAR и геолокализации GNSS. Эта возможность предусмотрена в первом поколении спутников GALLILEO и для третьего будущего поколения спутников GPS.
На фиг. 1 показана такая система для случая применения спутников GALLILEO. Радиомаяк 101 сообщается с группировкой спутников 102a, 102b, 102c, 102d, 102e SAR. По меньшей мере, один из этих спутников 102с является также спутником геолокализации GNSS. Некоторые их этих спутников могут выполнять только функцию геолокализации. Радиомаяк 101 передает свою информацию бедствия в тревожном сообщении по восходящему каналу 111, 114 в направлении спутника SAR 102b, 102c. Затем тревожное сообщение ретранслируется на наземную станцию 104 по нисходящему каналу 112, 115. Позиционирование радиомаяка 101 происходит в основном за счет использования в маяке приемника GNSS, и вычисленное таким образом положение передается по восходящему каналу между маяком и спутником. Этот приемник принимает сигнал позиционирования, по меньшей мере от четырех спутников GNSS, находящихся в зоне видимости, и может вывести из этого сигнала свое положение при помощи известных средств. Затем положение передается по восходящему каналу 111, 115 вместе с сообщением бедствия и поступает на наземную станцию 104, которая может затем сообщить положение маяка в центр контроля. Преимуществом использования среднеорбитальных спутников является то, что, по меньшей мере, один из этих спутников постоянно находится в зоне видимости с земли, что позволяет обеспечить подтверждение приема тревожного сообщения наземной станцией.
Однако использование приемника позиционирования, установленного в радиомаяке, имеет недостатки, связанные со сложностью обработки, которую необходимо произвести для локализации, а также с энергопотреблением маяка. В частности, чтобы себя локализовать, приемник GNSS должен сначала осуществить поиск, по меньшей мере, четырех спутников геолокализации, находящихся в зоне видимости. Например, декодирование сигнала GPS может занять от 30 секунд до 1 минуты для вычисления первой точки. Это довольно большое время обработки напрямую влияет на автономность маяка.
Задачей настоящего изобретения является, в частности, снижение сложности и энергопотребления радиомаяка с использованием функциональных возможностей системы тревожного оповещения для прямого определения позиционирования, не прибегая к использованию приемника GNSS или ограничивая его использование. Одной из задач изобретения является также сокращение времени настройки перед определением позиционирования. Совместное использование системы тревожного оповещения SAR и системы спутникового позиционирования GNSS предназначено для оптимальной эксплуатации всех имеющихся в наличии ресурсов.
Объектом изобретения является способ геолокализации устройства, передающего сигнал, содержащий, по меньшей мере, одно сообщение, предназначенное для нескольких спутников-ретрансляторов на средней околоземной орбите в зоне видимости упомянутого устройства, принимающих упомянутое сообщение и передающих его на средства обработки, отличающийся тем, что содержит, по меньшей мере, следующие этапы:
- определение моментов TRi приема упомянутого сообщения упомянутыми спутниками-ретрансляторами,
- определение псевдорасстояний Di между упомянутым устройством и упомянутыми спутниками-ретрансляторами посредством решения системы уравнений TRi=Di/c+Te, где с является скоростью распространения передаваемого сигнала, Те является моментом передачи сообщения устройством, и i меняется от 1 до числа Nvis спутников-ретрансляторов в зоне видимости,
- определение положения упомянутого устройства на основании, по меньшей мере, упомянутых псевдорасстояний Di и координат позиционирования упомянутых спутников-ретрансляторов.
В варианте выполнения изобретения спутники-ретрансляторы входят в состав группировки системы тревожного оповещения SAR.
В варианте выполнения изобретения упомянутый сигнал является сигналом бедствия, содержащим тревожное сообщение.
В варианте выполнения изобретения способ дополнительно содержит:
- этап поиска и приема при помощи средств приема, которыми оборудовано упомянутое устройство, числа N спутниковых радионавигационных сигналов, при этом N является числом, по меньшей мере, равным 2+m-Nvis, где m является числом пространственных координат упомянутого устройства и Nvis является числом спутников-ретрансляторов в зоне видимости устройства,
- определение временной разницы между передачей упомянутых радионавигационных сигналов и их приемом упомянутым устройством,
- передачу упомянутым устройством этой временной разницы в упомянутом сообщении,
- определение положения упомянутого устройства посредством дополнительного решения следующих уравнений, TRj(GNSS)=Dj(GNSS)/c+Tej(GNSS), где TRj(GNSS) является моментом приема маяком радионавигационного сигнала, передаваемого спутником GNSS j, Tej(GNSS) является моментом передачи и Dj(GNSS) является псевдорасстоянием между маяком и спутником GNSS j.
В варианте выполнения изобретения этап поиска и приема спутниковых радионавигационных сигналов начинается, когда число Nvis спутников-ретрансляторов в зоне видимости строго меньше 1+m.
В варианте выполнения изобретения момент передачи Те упомянутого сообщения измеряют посредством упомянутого устройства и передают в сообщении в направлении упомянутых спутников-ретрансляторов, которые, в свою очередь, передают его на упомянутые средства обработки, при этом минимальное число N искомых радионавигационных сигналов уменьшается на единицу, когда число Nvis спутников-ретрансляторов в зоне видимости упомянутого устройства строго меньше 1+m.
В варианте выполнения изобретения способ дополнительно содержит измерения частоты приема упомянутого сигнала, передаваемого упомянутым устройством в направлении упомянутых спутников-ретрансляторов, при этом на основании этих измерений и частоты передачи упомянутого сигнала дополнительно производят определение положения упомянутого устройства.
В варианте выполнения изобретения данные о положении устройства передают вместе с сообщением на спутники-ретрансляторы, затем на упомянутые средства обработки.
В варианте выполнения изобретения координаты позиционирования спутников-ретрансляторов и/или радионавигационных спутников определяют на основании эфемерид этих спутников.
Объектом изобретения является также система для геолокализации устройства, отличающаяся тем, что содержит устройство, выполненное с возможностью передачи сообщения, множество спутников-ретрансляторов на средней околоземной орбите, выполненных с возможностью приема упомянутого сообщения и его передачи, и средства обработки, выполненные с возможностью определения положения упомянутого устройства, при этом упомянутая система выполнена с возможностью применения способа в соответствии с настоящим изобретением.
В варианте выполнения изобретения спутники-ретрансляторы входят в состав группировки системы тревожного оповещения и спасения SAR.
В варианте выполнения изобретения упомянутые средства обработки находятся на расстоянии от упомянутых спутников-ретрансляторов или установлены на упомянутых спутниках-ретрансляторах.
В варианте выполнения изобретения упомянутые спутники-ретрансляторы дополнительно содержат средства передачи радионавигационного сигнала.
В варианте выполнения изобретения упомянутое устройство является радиомаяком, и упомянутый сигнал является сигналом бедствия, содержащим тревожное сообщение, при этом упомянутые средства обработки передают упомянутое тревожное сообщение в центр контроля.
Другие отличительные признаки и преимущества изобретения будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, на которых:
Фиг. 1 - схема системы тревожного оповещения с группировкой спутников на средней околоземной орбите МЕО.
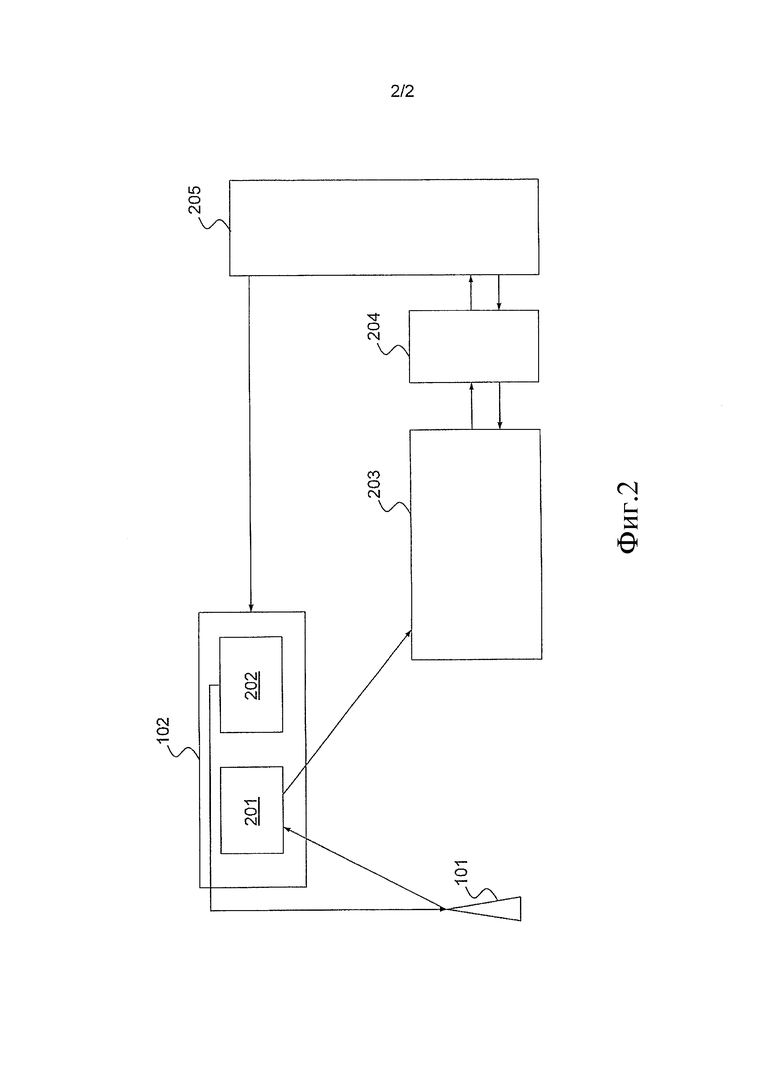
Фиг. 2 - блок-схема системы геолокализации в соответствии с настоящим изобретением.
На фиг. 2 представлена блок-схема системы геолокализации радиомаяка в соответствии с настоящим изобретением. Маяк 101 содержит средства формирования и передачи тревожного сигнала, содержащего информацию бедствия. Он дополнительно содержит средства приема радионавигационного сигнала, например, сигнала, передаваемого спутником GNSS. Радиомаяк 101 сообщается, по меньшей мере, с одним спутником-ретранслятором 102, который содержит первые средства 201 приема тревожного сигнала и передачи упомянутого сигнала на наземную станцию 203. Спутник-ретранслятор 102 дополнительно содержит вторые радионавигационные средства 202, позволяющие передавать сигнал типа GNSS в направлении маяка 101 на земле. Средства приема 201 и радионавигации 202 могут находиться на двух разных спутниках. Наземная станция 203 принимает сообщения, содержащиеся в тревожном сигнале, и передает их в не показанный центр контроля. Устройство 204 программирования позволяет генерировать подтверждение приема для передачи на маяк 101. Дистанционное устройство управления 205 обеспечивает управление спутниками.
В дальнейшем тексте описания спутником-ретранслятором будет называться спутник, содержащий средства 201 приема тревожного сигнала, например, спутник, совместимый с системой SAR.
Одним из преимуществ использования спутников на орбите МЕО является то, что из одной точки на земле в зоне видимости одновременно можно наблюдать несколько спутников. И наоборот, для системы тревожного оповещения, использующей только один низкоорбитальный спутник (LEO), чаще всего в зоне видимости находится только один спутник, что вынуждает применять способ геолокализации только на основании доплеровской информации, связанной с перемещением этого единственного спутника.
Как было указано выше, когда происходит бедствие, радиомаяк 101 передает тревожный сигнал на частоте подачи сигнала бедствия на все спутники в зоне видимости, которые содержат средства 201 приема такого сигнала. Тревожный сигнал передается в режиме радиовещания или “broadcast”, то есть он передается на все спутники, находящиеся в режиме прослушивания на частоте бедствия. Преимуществом радиовещания является то, что оно не требует наличия механизма предварительного поиска, чтобы определить, какие спутники находятся в зоне видимости маяка. Когда спутник i принимает тревожное сообщение, он может его датировать моментом TRi его приема по своим внутренним часам. На основании этой информации можно определить отношение, которое связывает время Те передачи тревожного сообщения радиомаяком с моментом TRi приема сообщения спутником и с расстоянием Di между маяком и спутником:
TRi=Di/c+Te

где с является скоростью распространения переданного сигнала и i меняется от 1 до числа спутников в зоне видимости. Поскольку моменты TRi и Те не измеряются одними и теми же часами и между часами радиомаяка и часами спутников могут быть расхождения, то говорят о псевдорасстоянии Di, а не о реальном расстоянии, которое получают после оценки временной разницы между двумя часами.
Положение спутника известно от него самого или от наземной станции 203. Отношение (1) содержит четыре неизвестных: три пространственных координаты маяка 101 и время передачи Те тревожного сообщения. Таким образом, если в зоне видимости маяка находятся, по меньшей мере, четыре спутника, можно решить полученную систему уравнений, чтобы из нее вывести точное позиционирование маяка.
В случае, когда позиционирование радиомаяка производят только по двум измерениям, то отношение (1) содержит только три неизвестных, и в зоне видимости необходимо наличие только трех спутников. Как правило, необходимое число спутников равно числу неизвестных, которое содержит отношение (1). Если m является числом координат радиомаяка, число спутников в зоне видимости, необходимых для определения позиционирования радиомаяка, будет равно 1+m.
В варианте выполнения изобретения радиомаяк может также включать время Те передачи в передаваемое тревожное сообщение. В этом случае четвертая неизвестная соответствует временной погрешности между Те и значениями времени TRi приема, связанной с несинхронностью между часами спутников и часами маяка.
Таким образом, применяя изобретение с четырьмя видимыми спутниками, содержащими только средства приема тревожного сообщения, можно полностью отказаться от использования в радиомаяке приемника GNSS, что дает очевидный выигрыш в простоте, автономии и времени обработки.
Измерения времени приема осуществляются на борту спутников и передаются вместе с тревожными сообщениями и, в случае необходимости, с положениями спутников на наземную станцию, которая производит необходимую обработку для решения системы уравнений с четырьмя неизвестными, позволяющего получить позиционирование маяка 101. Для этого наземная станция 203 содержит средства обработки получаемых данных. В альтернативном варианте решение системы может также производить полезная нагрузка на борту спутника, которая в этом случае напрямую передает на наземную станцию информацию позиционирования маяка.
В варианте выполнения изобретения измерения времени приема можно полностью или частично заменить измерениями доплеровской частоты. Вместе с тем, поскольку скорость перемещения спутника на средней околоземной орбите МЕО меньше, чем скорость перемещения спутника на низкой орбите LEO, точность этих доплеровских измерений является меньшей.
На практике, в частности, в условиях городской среды в связи с присутствием многочисленных препятствий число спутников в зоне видимости может быть меньше четырех. В случае, когда в зоне видимости находится не более трех спутников-ретрансляторов, настоящее изобретение позволяет дополнить измерения, необходимые для геолокализации маяка, дополнительными измерениями, производимыми на радионавигационном сигнале, принимаемом маяком.
Известно, что приемник радионавигационного сигнала использует измерения, производимые на сигналах, поступающих, по меньшей мере, от четырех спутников, для определения данных, связанных с его позиционированием. Для каждого спутника момент приема сигнала маяком связан с моментом передачи сигнала спутником и с расстоянием между спутником и приемником. Пространственные координаты спутника передаются в сигнале, который, следовательно, должен быть полностью демодулирован приемником.
В случае изобретения положения спутников известны от наземных станций 203 либо посредством прямой передачи этой информации вместе с тревожным сообщением для спутников, выполняющих эту функцию, либо при помощи эфемерид. Радионавигационный сигнал, принимаемый маяком, не требует, таким образом, полной демодуляции, а только оценки разницы между моментом передачи спутником и моментом приема маяком. Эту оценку вычисляют на основании обнаружения и датировки пика корреляции в принятом сигнале. Например, в сигнале GALLILEO этот пик корреляции, называемый также “pilot tone”, появляется каждые 4 мс. Датировка пика корреляции позволяет получить информацию о временной разнице между временем передачи спутником GNSS и временем приема маяком. Временное расхождение существует из-за того, что часы спутников и маяка не синхронизированы. Нет необходимости в устранении этого расхождения, поскольку неизвестную Те в этом случае определяют непосредственно в системе отсчета времени часов спутника. После этого эту информацию передают вместе с тревожным сообщением на спутник-ретранслятор 102, затем на наземную станцию 203, и в комбинации с измерениями времени приема тревожного сообщения спутником она позволяет определить позиционирование маяка.
В этом случае систему уравнений (1) дополняют следующими уравнениями:
TRj(GNSS)=Dj(GNSS)/c+Tej(GNSS)
где TRj(GNSS) является моментом приема маяком радионавигационного сигнала, переданного спутником GNSS с индексом j, Tej(GNSS) является моментом передачи и Dj(GNSS) является псевдорасстоянием между маяком и спутником GNSS j.
В варианте выполнения изобретения маяк может передавать целый участок радионавигационного сигнала продолжительностью, достаточной для измерения пика корреляции, по восходящему каналу в конечном направлении наземной станции, которая будет осуществлять измерения. Этот вариант представляет собой более простое в применении решение для маяка, однако является намного более дорогим по объему данных, передаваемых по восходящему каналу, что может вызвать затруднения с точки зрения имеющейся полосы пропускания на восходящем канале.
На практике система содержит пять неизвестных, которыми являются три координаты маяка в пространстве, момент передачи тревожного сообщения и временное расхождение по датировке пика корреляции радионавигационного сигнала. В этом случае изобретение можно применять в следующих конфигурациях: три спутника-ретранслятора и два радионавигационных спутника или два спутника-ретранслятора и три радионавигационных спутника. Если в зоне видимости находится только один спутник-ретранслятор, радиомаяк должен произвести поиск четырех радионавигационных спутников, как в классической системе GNSS, но ему не потребуется полностью демодулировать сигналы для получения точных положений спутников, как было указано выше.
В варианте выполнения изобретения маяк может передавать момент передачи тревожного сообщения вместе с упомянутым сообщением в блок, соответствующий внутренним часам. В этом случае система содержит только четыре неизвестных. При этом изобретение можно применять в следующих конфигурациях: три спутника-ретранслятора и один радионавигационный спутник, или два спутника-ретранслятора и два радионавигационных спутника, или еще один спутник-ретранслятор и три радионавигационных спутника.
В целом, если N является числом спутников-ретрансляторов в зоне видимости радиомаяка, то этот маяк должен, как минимум, произвести число 5-N поисков радионавигационных сигналов в случае, если момент передачи тревожного сообщения не был передан, и число 4-N поисков в противоположном случае.
Описанный выше вариант выполнения изобретения основан на примере системы тревожного оповещения типа SAR. Не выходя за рамки изобретения, его можно применять также для любой спутниковой системы сбора данных, в которой данные передаются от радиомаяка на средства приема, находящиеся на борту спутника, и ретранслируются на наземную станцию. Кроме того, изобретение можно точно так же применять для любого устройства, эквивалентного радиомаяку, которое содержит, с одной стороны, средства генерирования, датировки и передачи сообщения на спутник и, с другой стороны, средства приема и обработки радионавигационного сигнала, поступающего от спутника.
В заключение можно отметить, что преимуществом способа и системы в соответствии с настоящим изобретением является упрощение видов обработки, осуществляемой радиомаяком с целью его позиционирования, а также сокращение необходимого времени обработки перед определением первой точки измерения.
Изобретение использует объединенные свойства системы тревожного оповещения и радионавигационной системы, при этом спутники обеих систем находятся на одинаковой средней околоземной орбите, которая обеспечивает видимость достаточного числа спутников из одной точки земли для определения информации позиционирования посредством вычисления псевдорасстояний.

Изобретение относится к области радиосвязи. Техническим результатом является снижение сложности и энергопотребления радиомаяка с использованием функциональных возможностей системы тревожного оповещения для прямого определения позиционирования, не прибегая к использованию приемника GNSS или ограничивая его использование. Указанный технический результат достигается тем, что определяют моменты TRi приема сообщения, предназначенного для нескольких спутников-ретрансляторов (102a, 102b, 102c, 102d, 102e) на средней околоземной орбите (МЕО) в зоне видимости упомянутого устройства, принимающих упомянутое сообщение и передающих его на средства обработки, упомянутыми спутниками-ретрансляторами; определяют псевдорасстояния Di между устройством (101), передающим сигнал, и упомянутыми спутниками, проводят поиск и прием минимального числа N спутниковых радионавигационных сигналов, определяют временную разницу между передачей упомянутых радионавигационных сигналов и их приемом упомянутым устройством (101), передают упомянутым устройством (101) эту временную разницу в упомянутом сообщении, определяют положение упомянутого устройства на основании, по меньшей мере, упомянутых псевдорасстояний Di и координат позиционирования упомянутых спутников-ретрансляторов. 2 н. и 11 з.п. ф-лы, 2 ил.
1. Способ геолокализации устройства (101), передающего сигнал, содержащий по меньшей мере одно сообщение, предназначенное для нескольких спутников-ретрансляторов (102а, 102b, 102с, 102d, 102е) на средней околоземной орбите (МЕО) в зоне видимости упомянутого устройства, принимающих упомянутое сообщение и передающих его на средства (203) обработки, отличающийся тем, что содержит, по меньшей мере, следующие этапы:
- определение моментов TRi приема упомянутого сообщения упомянутыми спутниками-ретрансляторами,
- определение псевдорасстояний Di между упомянутым устройством (101) и упомянутыми спутниками-ретрансляторами посредством решения системы уравнений TRi=Di/c+Te, где с является скоростью распространения передаваемого сигнала, Те является моментом передачи сообщения устройством (101), и i меняется от 1 до числа Nvis спутников-ретрансляторов в зоне видимости,
- определение положения упомянутого устройства на основании, по меньшей мере, упомянутых псевдорасстояний Di и координат позиционирования упомянутых спутников-ретрансляторов;
- поиск и прием при помощи средств приема, которыми оборудовано упомянутое устройство (101), числа N спутниковых радионавигационных сигналов, при этом N является числом, по меньшей мере, равным 2+m-Nvis, где m является числом пространственных координат упомянутого устройства (101) и Nvis является числом спутников-ретрансляторов в зоне видимости устройства (101),
- определение временной разницы между передачей упомянутых радионавигационных сигналов и их приемом упомянутым устройством (101),
- передачу упомянутым устройством (101) этой временной разницы в упомянутом сообщении,
- определение положения упомянутого устройства (101) посредством дополнительного решения следующих уравнений: TRj(GNSS)=Dj(GNSS)/с+Tej(GNSS), где TRj(GNSS) является моментом приема маяком радионавигационного сигнала, передаваемого спутником GNSS j, Tej(GNSS) является моментом передачи и Dj(GNSS) является псевдорасстоянием между маяком и спутником GNSS j.
2. Способ геолокализации по п. 1, отличающийся тем, что спутники-ретрансляторы (102а, 102b, 102с, 102d, 102е) входят в состав группировки системы тревожного оповещения и спасения SAR.
3. Способ геолокализации по одному из пп. 1 или 2, отличающийся тем, что упомянутый сигнал является сигналом бедствия, содержащим тревожное сообщение.
4. Способ геолокализации по п. 1, отличающийся тем, что этап поиска и приема спутниковых радионавигационных сигналов начинается, когда число Nvis спутников-ретрансляторов в зоне видимости строго меньше 1+m.
5. Способ геолокализации по п. 4, отличающийся тем, что момент передачи Те упомянутого сообщения измеряют посредством упомянутого устройства (101) и передают в сообщении в направлении упомянутых спутников-ретрансляторов, которые, в свою очередь, передают его на упомянутые средства (203) обработки, при этом минимальное число N искомых радионавигационных сигналов уменьшается на единицу, когда число Nvis спутников-ретрансляторов в зоне видимости упомянутого устройства строго меньше 1+m.
6. Способ геолокализации по п. 1, отличающийся тем, что дополнительно содержит измерения частоты приема упомянутого сигнала, передаваемого упомянутым устройством (101) в направлении упомянутых спутников-ретрансляторов, при этом на основании этих измерений и частоты передачи упомянутого сигнала дополнительно производят определение положения упомянутого устройства (101).
7. Способ геолокализации по п. 1, отличающийся тем, что данные о положении устройства (101) передают вместе с сообщением на спутники-ретрансляторы, затем на упомянутые средства (203) обработки.
8. Способ геолокализации по п. 1, отличающийся тем, что координаты позиционирования спутников-ретрансляторов и/или радионавигационных спутников определяют на основании эфемерид этих спутников.
9. Система для геолокализации устройства (101), отличающаяся тем, что содержит устройство (101), выполненное с возможностью передачи сообщения, множество спутников-ретрансляторов (102а, 102b, 102с, 102d, 102е) на средней околоземной орбите (МЕО), выполненных с возможностью приема упомянутого сообщения и его передачи, и средства (203) обработки, выполненные с возможностью определения положения упомянутого устройства, при этом упомянутая система выполнена с возможностью применения способа по одному из пп. 1-8.
10. Система по п. 9, отличающаяся тем, что спутники-ретрансляторы (102а, 102b, 102с, 102d, 102е) входят в состав группировки системы тревожного оповещения и спасения SAR.
11. Система по одному из пп. 9 или 10, отличающаяся тем, что упомянутые средства (203) обработки находятся на расстоянии от упомянутых спутников-ретрансляторов или установлены на упомянутых спутниках-ретрансляторах.
12. Система по одному из пп. 9 или 10, отличающаяся тем, что упомянутые спутники-ретрансляторы дополнительно содержат средства передачи радионавигационного сигнала.
13. Система по одному из пп. 9 или 10, отличающаяся тем, что упомянутое устройство является радиомаяком, и упомянутый сигнал является сигналом бедствия, содержащим тревожное сообщение, при этом упомянутые средства (203) обработки передают упомянутое тревожное сообщение в центр контроля.
| US6593877 B2, 15.07.2003 | |||
| Приспособление к устройству для резки на столбики цельно-бланшированных картофеля и овощей | 1956 |
|
SU104657A2 |
| Способ получения окрашенных в масле полиамидных волокон | 1978 |
|
SU860709A1 |
| US6990314 B1, 21.01.2006 | |||
| СИСТЕМА ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ-ПОТРЕБИТЕЛЕЙ НАВИГАЦИОННОЙ ИНФОРМАЦИИ ПО НАВИГАЦИОННЫМ РАДИОСИГНАЛАМ С САНКЦИОНИРОВАННЫМ ДОСТУПОМ В РЕЖИМЕ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 2000 |
|
RU2161317C1 |
| ГЛОБАЛЬНАЯ КОСМИЧЕСКАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И РАДИОНАВИГАЦИИ, РАДИОМАЯК И ПРИЕМНИК, ИСПОЛЬЗУЕМЫЕ В ДАННОЙ СИСТЕМЕ | 1996 |
|
RU2182341C2 |
| US2008174484 A1, 24.07.2008. | |||

