Область техники, к которой относится изобретение
Настоящее изобретение относится к системе помощи при движении задним ходом с прицепом.
Уровень техники
Зачастую транспортные средства используют для езды с прицепом, при этом многие владельцы транспортных средств имеют несколько прицепов. Транспортное средство, буксирующее прицеп, может быть оборудовано различными системами, помогающими водителю при буксировке и/или движении задним ходом с прицепом. Такие системы транспортного средства используют алгоритмы управления, основанные на известных значениях определенных параметров прицепа, что является основой правильной и надежной работы данных алгоритмов. В частности, система помощи при движении задним ходом с прицепом помогает водителю управлять транспортным средством с присоединенным прицепом. Система помощи при движении задним ходом с прицепом использует алгоритм управления, основанный на известных значениях определенных параметров прицепа, многие из которых являются постоянными, например, идентификационный номер прицепа, являющийся уникальным для каждого прицепа, буксируемого с помощью транспортного средства, эффективная длина дышла и общая длина прицепа.
Следовательно, для обеспечения правильной работы система помощи при движении задним ходом с прицепом должна иметь возможность получать доступ и производить настройку в соответствии со значениями параметров прицепа, являющихся уникальными для присоединенного прицепа. В настоящее время для идентификации прицепа и ввода конкретных значений параметров прицепа в систему помощи при движении задним ходом с прицепом необходимо, чтобы водитель вводил несколько значений параметров прицепа в систему помощи при движении задним ходом с прицепом посредством человекомашинного интерфейса (HMI), переключаясь между символами, экранами и т.д., вводя таким образом значения параметров, используемых алгоритмами системы помощи при движении задним ходом с прицепом, указывал название прицепа и т.д., присваивал целевое значение для прицепа, калибровал систему помощи при движении задним ходом с прицепом и запускал систему помощи для начала движения задним ходом с прицепом.
После завершения ввода данных о прицепе в систему в первый раз их можно сохранить в системе помощи при движении задним ходом с прицепом для последующего использования водителем. В этом случае после присоединения прицепа к буксирующему транспортному средству и запуска системы помощи при движении задним ходом с прицепом водителю нужно переключиться между несколькими экранами для того, чтобы найти и выбрать нужный прицеп, который был присоединен к транспортному средству, и активировать нужные значения параметров прицепа для использования системой помощи при движении задним ходом с прицепом. Кроме того, для обеспечения правильности работы системы помощи при движении задним ходом с прицепом следует выбрать целевое значение для выполнения масштабирования, калибровки и других функций.
Недостаток, связанный с данным способом ввода и идентификации данных о прицепе, заключается в том, что водителю постоянно приходится выполнять соответствующие измерения необходимых параметров прицепа, следить за правильностью ввода значений параметров в систему помощи при движении задним ходом с прицепом и настраивать работу системы помощи при движении задним ходом с прицепом в соответствии с полученными значениями параметров прицепа. Зачастую данные действия выполняются после присоединения прицепа, из-за чего водитель может не иметь достаточного времени для ввода необходимых данных, он может не иметь под рукой необходимого оборудования для выполнения соответствующих измерений или может ошибиться при вводе данных. Более того, даже в случае получения актуальных данных о прицепе их необходимо вводить при каждом подсоединении данного прицепа. Если при подсоединении другого прицепа к транспортному средству водитель ошибется или не обновит данные в системе помощи при движении задним ходом с прицепом, может возникнуть ситуация, когда система помощи при движении задним ходом с прицепом будет использовать данные, не позволяющие обеспечить оптимальную работу системы.
В качестве альтернативы система помощи при движении задним ходом с прицепом может обнаруживать присоединение прицепа при подсоединении жгута проводов прицепа к сцепке на транспортном средстве. Жгут проводов обеспечивает подачу питания на фонари тормоза, фонари сигналов поворота и ходовые огни. С точки зрения систем, используемых при буксировке прицепа, обнаружение подключения жгута проводов может соответствовать подсоединению прицепа. Данный принцип также может быть использован системой помощи при движении задним ходом с прицепом. При этом система может обнаруживать присоединение прицепа, но водителю придется просматривать список возможных конфигураций прицепа для выбора нужного прицепа и активации конфигурации прицепа в системе помощи при движении задним ходом с прицепом. Недостаток способа, основанного на обнаружении присоединения прицепа к транспортному средству, заключается в том, что на сцепке транспортного средства могут быть установлены нестандартные номерные знаки или устройства подсветки, мешающие обнаружению прицепа при помощи жгута, что приводит к ложному обнаружению или к тому, что система помощи при движении задним ходом с прицепом обнаружит присоединение прицепа, но не сможет идентифицировать присоединенный прицеп или не сможет определить, подсоединен ли новый или другой прицеп с известными значениями параметрами.
Существует необходимость создания системы помощи при движении задним ходом с прицепом для реализации способа определения подсоединения прицепа к транспортному средству, идентификации конкретного прицепа, подсоединенного к транспортному средству, передачи необходимых параметров прицепа, соответствующих подсоединенному прицепу в систему помощи при движении задним ходом с прицепом, настройки системы помощи при движении задним ходом с прицепом с помощью правильных значений параметров прицепа. Кроме того, существует необходимость предоставления водителю возможности присвоения названия и сохранения конфигурации для будущего использования при буксировке данного прицепа. Также существует необходимость в способе, работающем без вмешательства водителя или исключающем вероятность ложного обнаружения. Также существует необходимость в способе, который после обнаружения и идентификации прицепа предоставляет системе помощи при движении задним ходом с прицепом доступ к сохраненной конфигурации для выбранного и идентифицированного прицепа, присоединенного к транспортному средству, таким образом, чтобы алгоритм управления системы помощи при движении задним ходом с прицепом выдавал правильные инструкции для транспортного средства по движению назад с конкретным прицепом без необходимости выполнения водителем ввода, выбора и настройки параметров прицепа, используемых системой помощи при движении задним ходом с прицепом.
Раскрытие изобретения
Настоящее изобретение относится к системе помощи при движении задним ходом с прицепом и способу ее настройки. Заранее установленные значения параметров прицепа, указанные на прикрепленной к прицепу метке, передаются контроллеру в системе помощи при движении задним ходом с прицепом. Система помощи при движении задним ходом с прицепом выполнена с возможностью использования заранее установленных значений параметров прицепа и включения системы помощи при движении задним ходом с прицепом для работы на основе значений параметров прицепа.
В одном варианте осуществления настоящего изобретения происходит обнаружение и считывание данных со считываемой метки на прицепе при помощи устройства считывания, установленного на транспортном средстве. Устройство считывания передает данные на контроллер системы помощи при движении задним ходом с прицепом, при этом система помощи при движении задним ходом с прицепом выполнена с возможностью использования заранее установленных значений параметров прицепа, считываемых с метки.
Система помощи при движении задним ходом с прицепом может распознавать конфигурацию прицепа, считываемую с метки, и выбирать конфигурацию прицепа, сохраненную в памяти контроллера, для настройки алгоритма управления, используемого в системе помощи при движении задним ходом с прицепом.
Краткое описание чертежей
На Фиг. 1 показано транспортное средство с прицепом, оборудованное системой помощи при движении задним ходом с прицепом, которая может идентифицировать прицеп в соответствии с одним вариантом осуществления настоящего изобретения;
на Фиг. 2 показана схема транспортного средства, оборудованного системой помощи при движении задним ходом с прицепом, которая может идентифицировать присоединенный прицеп;
на Фиг. 3 представлен схематический вид, на котором показана кинематическая модель, позволяющая получить данные, используемые системой помощи при движении задним ходом с прицепом в соответствии с настоящим изобретением;
на Фиг. 4 приведена схема, на которой показано соотношение между углом поворота сцепки и углом поворота транспортного средства, используемое системой помощи при движении задним ходом с прицепом;
на Фиг. 5 показана блок-схема для способа идентификации конфигурации прицепа, используемой системой помощи при движении задним ходом с прицепом в соответствии с настоящим изобретением.
Конкретные компоненты и этапы показаны на фигурах для простоты и ясности, поэтому они необязательно должны выполняться в указанной последовательности. Другими словами, последовательный или другой порядок выполнения этапов представлен на фигурах исключительно для ознакомления с возможными вариантами осуществления настоящего изобретения.
Осуществление изобретения
Хотя в настоящем документе различные аспекты изобретения рассмотрены со ссылкой на конкретные варианты осуществления, они не должны рассматриваться как ограничения, также следует понимать, что могут быть предусмотрены различные изменения, варианты осуществления и использования без отступления от настоящего изобретения. Одинаковые компоненты на фигурах обозначены одинаковыми ссылочными позициями. Специалисты в данной области техники должны понимать, что различные компоненты, указанные в настоящем документе, могут быть изменены без отступления от сущности настоящего изобретения. Настоящее изобретение относится к прицепу и буксирующему транспортному средству, оборудованному системой помощи при движении задним ходом с прицепом, которая использует алгоритм регулировки кривизны пути прицепа для системы движения задним ходом с прицепом.
На Фиг. 1 показано буксирующее транспортное средство 100, к которому подсоединен прицеп 110. Прицеп 110 может быть подключен к различным системам транспортного средства, включая, но не ограничиваясь этим, систему 105 помощи при движении задним ходом с прицепом, которая содержит управляющий блок 120, установленный на буксирующем транспортном средстве. Обмен данными между прицепом 110 и управляющим блоком 120 может осуществляться при помощи проводного соединения, например жгута проводов, или беспроводного соединения. Система помощи при движении задним ходом с прицепом управляется с помощью управляющего блока 120 на буксирующем транспортном средстве, который управляет изменением кривизны пути прицепа, присоединенного к транспортному средству. Водитель вводит необходимое значение кривизны пути прицепа с помощью устройства ввода значения для управления движением задним ходом с прицепом, не показанным на Фиг. 1, во время движения транспортного средства и прицепа. Кинематические характеристики системы, включающей в себя транспортное средство и прицеп, используются для расчета соотношения между кривизной пути прицепа и углом поворота транспортного средства. Управляющие команды, соответствующие изменениям угла поворота, используются для контроля системы рулевого управления транспортного средства, что позволяет изменять угол поворота управляемого колеса для обеспечения движения прицепа по заданному пути.
На Фиг. 2 описана система 105 помощи при движении задним ходом с прицепом. Система 105 помощи при движении задним ходом с прицепом содержит управляющий блок 120, устройство 125 ввода значения для управления движением задним ходом с прицепом, а также устройство 130 определения угла поворота сцепки. Управляющий блок 120 подключен к устройству 125 ввода и к устройству 130 определения угла поворота сцепки, что позволяет ему обмениваться данными с данными блоками. Управляющий блок 120 подключен к управляющему блоку 135 системы 115 рулевого управления с усилением для получения данных, передаваемых между блоками. Устройство 140 определения угла поворота в системе 115 рулевого управления с усилением подключено к управляющему блоку системы рулевого управления с усилением, что позволяет передавать на нее соответствующие данные. Система помощи при движении задним ходом с прицепом также подключена к управляющему блоку 145 тормозной системы и управляющему блоку 150 трансмиссии для обеспечения обмена данными между блоками. Система 105 помощи при движении задним ходом с прицепом, система 115 рулевого управления с усилением, управляющий блок 145 тормозной системы и управляющий блок 150 трансмиссии формируют систему помощи при движении задним ходом с прицепом, соответствующую настоящему изобретению.
Управляющий блок 120 системы помощи при движении задним ходом с прицепом выполнен с возможностью приема данных от устройства 125 ввода значения для управления движением задним ходом с прицепом, устройства 130 определения угла поворота сцепки, управляющего блока 135 системы рулевого управления с усилением, управляющего блока 145 тормозной системы и управляющего блока 150 трансмиссии. Управляющий блок 120 системы помощи при движении задним ходом с прицепом (например, ее алгоритм определения кривизны пути прицепа) генерирует параметры рулевого управления транспортным средством, зависящие от всех или отдельных данных, принятых от устройства 125 ввода значения для управления движением задним ходом с прицепом, устройства 130 определения угла поворота сцепки, управляющего блока 135 системы рулевого управления с усилением, управляющего блока 145 тормозной системы и управляющего блока 150 трансмиссии. После этого данные о рулевом управлении транспортным средством выдаются на управляющий блок 135 системы рулевого управления с усилением для регулировки рулевого управления транспортным средством 100 с помощью системы 115 рулевого управления с усилением для обеспечения движения прицепа 110 по заданному пути.
Устройство 125 ввода для рулевого управления при движении задним ходом с прицепом передает на управляющий блок 120 системы помощи при движении задним ходом с прицепом данные, определяющие заданный путь прицепа 110, на управляющий блок 120 системы помощи при движении задним ходом с прицепом (т.е. данные о рулевом управлении прицепом). Данные о рулевом управлении прицепом могут включать в себя данные о заданном изменении пути движения (например, об изменении радиуса кривизны пути) и данные для индикации того, что прицеп должен двигаться по траектории, определяемой продольной центральной осью прицепа (т.е. по прямому пути).
Управляющий блок 135 системы рулевого управления с усилением передает данные о величине поворота (например, об угле) рулевого колеса и/или величине поворота (например, об угле (углах) поворота) управляемых колес транспортного средства 100. В определенных вариантах осуществления настоящего изобретения управляющий блок 120 системы помощи при движении задним ходом с прицепом может быть встроен в систему 115 рулевого управления с усилением. Например, управляющий блок 135 системы рулевого управления с усилением может включать в себя алгоритм обеспечения помощи при движении задним ходом с прицепом для генерирования данных о рулевом управлении транспортным средством в виде функции зависимости от всех или некоторых данных, полученных от устройства 125 ввода значения для управления движением задним ходом с прицепом, устройства 130 определения угла поворота сцепки, управляющего блока 135 системы рулевого управления с усилением, управляющего блока 145 тормозной системы и управляющего блока 150 трансмиссии.
В соответствии с настоящим изобретением данные от устройства 125 ввода значения для управления движением задним ходом с прицепом предпочтительно включают в себя данные о кривизне пути прицепа, характеризующие желаемую кривизну пути прицепа, например, полученные от устройства 125 ввода значения для управления движением задним ходом с прицепом, как описано выше со ссылкой на Фиг. 1 и 2. Таким образом, прием сигнала о движении задним ходом с прицепом может включать в себя данные о кривизне пути прицепа, характеризующие желаемую кривизну пути прицепа. Принятые данные о прицепе используются для определения значений для рулевого управления транспортным средством.
В соответствии с настоящим изобретением в предпочтительном варианте определение значений для рулевого управления транспортным средством для получения значения необходимого изменения кривизны пути прицепа включает в себя определение данных о рулевом управлении транспортным средством в виде функции зависимости от данных о кривизне пути прицепа, содержащихся в сигнале данных о движении задним ходом с прицепом. Определение данных о рулевом управлении транспортным средством может быть выполнено с помощью кинематической модели низкого порядка для системы, включающей в себя транспортное средство и прицеп. С помощью данной модели можно получить соотношение между кривизной пути прицепа и заданными углами поворота управляемых колес транспортного средства, что позволит определить величину изменения угла поворота рулевого колеса для достижения указанной кривизны пути прицепа.
В соответствии с одним вариантом осуществления настоящего изобретения на Фиг. 1 показан прицеп 110 с меткой, например с электронной меткой 18, которая передает радиочастотный сигнал, содержащий данные о прицепе 110. Сигнал, получаемый от электронной метки, содержит данные о значениях постоянных параметров прицепа, являющихся специфическими для идентифицированного прицепа и необходимыми для работы системы 12 помощи при движении задним ходом с прицепом, например, об уникальном идентификационном коде прицепа, общей длине прицепа, общей длине дышла и максимальной буксировочной мощности. В другом варианте осуществления настоящего изобретения метка 28 представляет собой двумерный код (QRC), содержащий код с информацией о значениях параметров прицепа. Данные, передаваемые или принимаемые от метки 18, 28, представляют собой значения параметров прицепа, которые используются алгоритмом управления, основанным на кинематической модели, что позволяет системе помощи при движении задним ходом с прицепом корректно управлять прицепом.
В соответствии с описанием кинематической модели, используемой для вычисления соотношения кривизны пути прицепа и угла поворота транспортного средства, буксирующего прицеп, со ссылкой на Фиг. 3 для системы помощи при движении задним ходом с прицепом, выполненной в соответствии с некоторыми вариантами осуществления настоящего изобретения в предпочтительном варианте может быть использована кинематическая модель низкого порядка. Для получения кинематической модели низкого порядка делаются некоторые допущения, связанные с системой, включающей в себя транспортное средство и прицеп. Например, данные допущения включают в себя, но не ограничиваясь этим, то, что прицеп движется назад при помощи транспортного средства с относительно низкой скоростью, колеса транспортного средства и прицепа не (почти не) проскальзывают, шины транспортного средства и прицепа не (почти не) деформируются, динамика привода транспортного средства незначительна, на транспортное средство и прицеп не (почти не) испытывают усилий крена или тангажа.
Кинематическая модель 300 для системы, включающей в себя транспортное средство 302 и прицеп 304, основана на различных параметрах транспортного средства 302 и прицепа 304. Данные параметры кинематической модели включают в себя:
δ: угол поворота при повороте передних управляемых колес 306 транспортного средства 302;
α: угол рыскания транспортного средства 302;
β: угол рыскания прицепа 304;
γ: угол поворота сцепки (γ=β-α);
W: расстояние между осями колес транспортного средства 302;
L: расстояние между точкой 308 сцепки и задней осью 310 транспортного средства 302;
D: расстояние между точкой 308 сцепки и осью 312 прицепа 304;
r2: радиус кривизны пути прицепа 304.
Кинематическая модель 300 с Фиг. 3 отражает соотношение между радиусом r2 кривизны пути прицепа в средней точке 314 на оси 306 прицепа 304, углом δ поворота управляемых колес 306 транспортного средства 302 и углом γ поворота сцепки. Как видно из следующего уравнения, данное соотношение может быть использовано для определения кривизны κ2 пути прицепа так, что знание значения угла γ позволит регулировать кривизну κ2 пути прицепа на основе изменения угла δ поворота (где 

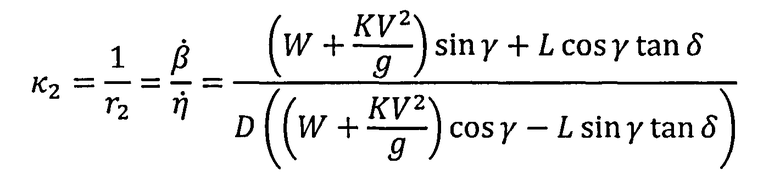
Также данное выражение позволяет получить значение угла δ поворота в виде функции зависимости от кривизны κ2 пути прицепа и угла γ поворота сцепки.

Соответственно, для конкретных сочетаний транспортного средства и прицепа определенные параметры кинематической модели (например, D, W и L) являются постоянными и считаются известными. Настоящее изобретение относится к системе и способу идентификации присоединенного прицепа и автоматической передачи постоянных и известных параметров идентифицированного прицепа. V - продольная скорость транспортного средства, a g - ускорение свободного падения. K - параметр, зависящий от скорости, при этом, когда он равен нулю, значение угла поворота управляемых колес не зависит от скорости транспортного средства. Например, параметры кинематической модели, зависящие от скорости, могут быть заранее установлены в электронной системе управления транспортного средства, а параметры кинематической модели, зависящие от прицепа, могут быть введены водителем транспортного средства. Кривизна κ2 пути прицепа определяется по входному значению, введенному водителем при помощи устройства 125 ввода значения для управления движением задним ходом с прицепом. С помощью приведенного уравнения для получения угла поворота может быть сгенерирована соответствующая команда для управления работой системы управления (например, исполнительным механизмом) транспортного средства.
На Фиг. 4 показан пример схемы 400 изменения кривизны пути прицепа с помощью устройства ввода значения для управления движением задним ходом с прицепом (например, устройства 125 ввода значения для управления движением задним ходом с прицепом, описанного со ссылкой на Фиг. 2). Значение кривизны пути прицепа (например, κ2) можно получить на основе выходного сигнала от устройства 125 ввода значения для управления движением задним ходом с прицепом, зависящего от действий водителя. В данном примере кривая 402, выражающая зависимость кривизны пути прицепа от пользовательского значения (например, величины поворота), введенного с помощью устройства ввода (например, ручки регулировки), представляет собой кубическую функцию. Однако специалисты в данной области техники должны понимать, что варианты осуществления настоящего изобретения не ограничиваются конкретной функцией зависимости между амплитудой и/или величиной, введенной с устройства ввода значения для управления движением задним ходом с прицепом (например, величиной поворота ручки регулировки), и итоговым значением кривизны траектории движения прицепа.
В соответствии с Фиг. 3 в предпочтительном варианте необходимо ограничить вероятность достижения угла складывания транспортного средства 302 и прицепа 304 (т.е. достижения условия складывания системы, включающей в себя транспортное средство и прицеп). Угол γ(j) складывания соответствует углу γ поворота сцепки, который не может быть компенсирован с помощью максимального входного значения для транспортного средства, например, с помощью поворота передних колес 306 транспортного средства 302, поворачиваемых на максимальный угол 5 поворота управляемых колес при максимальной скорости изменения угла поворота. Угол γ(j) складывания является функцией зависимости максимального угла поворота управляемого колеса 306 транспортного средства 302, расстояния W между осями колес транспортного средства 302, расстояния L между точкой 308 сцепки и задней осью 310 транспортного средства 302 и расстояния D между точкой 308 сцепки и осью 312 прицепа 304. Когда угол γ поворота сцепки для транспортного средства 302 и прицепа 304 достигает или превышает угол γ(j) складывания, транспортное средство 302 должно переместиться вперед для уменьшения угла γ поворота сцепки. Таким образом, для снижения вероятности достижения угла складывания системы, включающей в себя транспортное средство и прицеп, предпочтительно управлять углом рыскания прицепа, сохраняя угол поворота сцепки системы, включающей в себя транспортное средство и прицеп, на относительно низком уровне.
На Фиг. 3 и 4 предельное значение угла поворота для управляемых передних колес 306 должно быть таким, чтобы угол γ поворота сцепки не превышал угол γ(j) складывания, который также называется критическим углом поворота сцепки. Таким образом, при условии, что угол γ поворота сцепки не может превысить угол γ(j) складывания, угол γ(j) складывания будет представлять собой угол γ поворота сцепки, который позволит поддержать круговое движение для системы, включающей в себя транспортное средство и прицеп, когда управляемые колеса 306 повернуты на максимальный угол δ(max) поворота. Угол поворота для кругового движения и угол поворота сцепки определяется с помощью следующего уравнения.

Решение данного уравнения относительно угла поворота сцепки позволяет определить угол γ(j) складывания. Данное решение, представленное ниже, может быть использовано системой помощи при движении задним ходом с прицепом, соответствующей настоящему изобретению, для контроля угла поворота сцепки относительно угла складывания.

где
a=L2tan2δ(max)+W2;
b=2LDtan2δ(max);
c=D2tan2δ(max)-W2.
Из приведенного выше описания системы помощи при движении задним ходом с прицепом становится понятно, что при регулировке кривизны пути прицепа во время движения транспортного средства задним ходом с прицепом важными для алгоритма являются определенные параметры буксируемого прицепа. Например, для того чтобы алгоритм мог правильно работать должны быть известны эффективная длина дышла, общая длина прицепа, общая ширина прицепа и уникальный идентификатор для каждого буксируемого прицепа.
В соответствии с настоящим изобретением на Фиг. 1 представлена система 10 идентификации прицепа, встроенная в систему 105 помощи при движении задним ходом с прицепом, которая позволяет обнаружить, идентифицировать и сопоставить конкретный прицеп 110 с системой 105 помощи при движении задним ходом с прицепом. Система 10 включает в себя устройство 16, 26 считывания, подключенное к управляющему блоку 120 системы помощи при движении задним ходом с прицепом по беспроводному или другому каналу связи. Система 10 также имеет метку 18, 28 данных, расположенную на прицепе 110 таким образом, чтобы можно было обнаружить и идентифицировать прицеп 110, а также передать параметры системе 105 помощи при движении задним ходом с прицепом и сконфигурировать систему 105 помощи при движении задним ходом с прицепом, используя соответствующие данные о значениях параметров прицепа, когда прицеп 110 присоединяется к транспортному средству 100 и метка 18, 28 находится в пределах радиуса действия устройства 16, 26 считывания.
В одном варианте осуществления настоящего изобретения с Фиг. 1 устройство 16 считывания представляет собой радиочастотное идентификационное устройство считывания (RFID), а метка 18 - RFID-метку. RFID-метка 18 представляет собой электронную метку, запрограммированную или иным образом настроенную таким образом, чтобы содержать ключевые значения параметров прицепа, которые необходимо передать в систему помощи при движении задним ходом с прицепом. После подсоединения прицепа 110 к транспортному средству 100 в пределах радиуса действия устройства 16 считывания появляется электронная метка 18. Электронное устройство 16 считывания транспортного средства обнаруживает данные от электронной метки 18, расположенной на прицепе 110, и передает их на контроллер 14 системы помощи при движении задним ходом с прицепом транспортного средства 100.
Электронная метка 18 может поставляться производителем прицепа и содержать все необходимые параметры, устанавливаемые на заводе. В качестве альтернативы электронная метка 18 может представлять собой изделие вторичного рынка, приобретаемое владельцем прицепа, в этом случае электронная метка 18 также может быть настроена самим владельцем прицепа. Владелец прицепа может настроить метку с помощью соответствующих данных о прицепе до присоединения метки к прицепу. В предпочтительном варианте настройка метки должна выполняется в ситуации, когда владелец прицепа может использовать руководство для прицепа или получить точные значения прицепа. Конфигурируемая метка 18 программируется с помощью записывающего RFID-устройства. Записывающее RFID-устройство позволяет владельцу прицепа ввести и сохранить данные на конфигурируемой метке 18, а затем прикрепить метку 18 к прицепу. Электронная метка 18 выполнена с возможностью хранения всех необходимых данных о прицепе и подключения к системе помощи при движении задним ходом с прицепом. Когда прицеп соединен с транспортным средством 10, электронная метка 18 постоянно находится в пределах радиуса действия электронного устройства 16 считывания. Электронное устройство 16 считывания считывает необходимые данные с метки 18, а система помощи при движении задним ходом с прицепом либо настраивается для подсоединения прицепа или получения доступа к конфигурации прицепа, хранящейся на запоминающем устройстве (если прицеп присоединялся ранее к транспортному средству и информация о нем уже сохранена). Поскольку у владельца прицепа достаточно времени для выполнения точных измерений и ввода данных до того, как метка будет прикреплена к прицепу и запрограммирована с помощью необходимых данных, по сравнению с выдачей многочисленных запросов в момент присоединения прицепа, вероятность ошибки значительно снижается. Более того, владелец прицепа должен ввести значения параметров прицепа, соответствующие конфигурируемой метке только один раз, поскольку она может быть считана системой помощи при движении задним ходом с прицепом и сохранена для будущего использования при буксировке данного прицепа с помощью транспортного средства, что значительно увеличивает вероятность правильного ввода измеряемых значений и использования подходящих данных в системе помощи при движении задним ходом с прицепом. Кроме того, владельцу прицепа больше не нужно указывать, какой прицеп присоединен к транспортному средству, поскольку эти данные могут быть считаны с электронной метки. Также владелец прицепа может привезти транспортное средство, прицеп и метку к дилеру или в сервисную компанию, где ему помогут правильно записать данные о прицепе на метку.
В другом варианте осуществления, также показанном на Фиг. 1, устройство считывания представляет собой камеру 26 заднего обзора, подключенную к системе 105 помощи при движении задним ходом с прицепом, а метка 28 представляет собой двумерный код (QRC). Система 105 помощи при движении задним ходом с прицепом включает в себя устройство 130 определения угла поворота сцепки, которое может представлять собой камеру заднего обзора для отслеживания положения прицепа. Данная камера заднего обзора может быть использована для распознавания QRC на прицепе 110, идентификации прицепа 110 и настройки системы помощи при движении задним ходом с прицепом, используя значения параметров прицепа, что позволит исключить необходимость ввода измеряемых значений водителем и присвоения названия прицепу путем переключения между символами на HMI - или другом интерфейсе, например, с помощью клавиш со стрелками на рулевом колесе. QRC-метка 28 представляет собой закодированный символ, содержащий данные о параметрах прицепа. Камера 26 заднего обзора захватывает изображение QRC-метки, прикрепленной к прицепу 110. Камера 26 заднего обзора передает изображение в систему помощи при движении задним ходом с прицепом, которая обрабатывает изображение и расшифровывает QRC. Данные преобразуются в вид, используемый управляющим блоком 120 таким образом, чтобы ее можно было использовать в системе 105 помощи при движении задним ходом с прицепом.
QR-код представляет собой матричный штрих-код в виде оптического машиночитаемого изображения, размещаемого на метке 28. Изображение на метке 28 кодируется с помощью данных и считывается формирователем изображений, например, камерой 26. После расшифровки изображения метки происходит извлечение данных, используемых системой 105 помощи при движении задним ходом с прицепом. QRC-метка с индивидуальными настройками может быть приобретена и предоставлена владельцу прицепа. Производитель прицепа или транспортного средства может предложить вариант, в котором владелец прицепа отправляет серийный номер прицепа или другой идентификатор и получает метку 28 с QRC, который содержит все необходимые данные о прицепе.
QRC-метка с индивидуальными настройками заказывается и настраивается с помощью данных, предоставленных заказчиком. Заказ может быть получен производителем меток, производителем прицепа и/или производителем транспортного средства по телефону или через Интернет. В качестве альтернативы заказчик может обратиться к дилеру или в сервисную компанию, где метка будет сконфигурирована в соответствии с используемым прицепом. В еще одном примере заказчик может получить наклейки, которые можно распечатать на домашнем компьютере.
В качестве альтернативы машиночитаемый код может быть прикреплен к прицепу и может быть настроен транспортным средством таким образом, чтобы вводимое название прицепа и параметры сохранялись контроллером на транспортном средстве и сопоставлялись с кодом, прикрепленным к прицепу. Следовательно, когда прицеп с кодом присоединяется к транспортному средству, система управления прицепом транспортного средства распознает код и использует сохраненные данные для системы определения угла поворота прицепа и/или системы помощи при движении задним ходом с прицепом.
В другом варианте осуществления устройство 16, 26 считывания считывает метку 18, 28, принимает или извлекает данные и передает их в систему помощи при движении задним ходом с прицепом. После получения данных о прицепе управляющим блоком 120 системы помощи при движении задним ходом с прицепом управляющий блок 120 может идентифицировать прицеп по базе данных с известными конфигурациями прицепов или сохранять прицеп в качестве новой записи в базе известных конфигураций прицепов. Данный способ подходит для транспортных средств, используемых с несколькими прицепами. Путем определения прицепа, соединенного с буксирующим транспортным средством с помощью RFID-метки, можно выбрать известную конфигурацию прицепа, позволяющую настраивать, калибровать и оптимизировать работу системы управления при движении назад для оптимизации производительности системы, включающей в себя транспортное средство и прицеп, когда система помощи при движении задним ходом с прицепом движется назад без необходимости ввода водителем данных, используемых для настройки системы.
Способ 400, соответствующий настоящему изобретению, описан ниже в виде блок-схемы с Фиг. 5. Метка, RFID-метка или QRC-метка настраивается (этап 402) с помощью данных о конкретном прицепе, используемых системой помощи при движении задним ходом с прицепом. Как было сказано выше, настройка (этап 402) метки может быть выполнена дилером прицепа или транспортного средства, владельцем прицепа или может представлять собой метку с индивидуальными настройками, которая может быть заказана владельцем прицепа.
Метка крепится (этап 404) к прицепу в месте, подходящем для установления соединения с устройством считывания. Например, при использовании QRC метки ее необходимо установить в месте, в котором она может быть считана с помощью камеры заднего обзора, расположенной на буксирующем транспортном средстве. Аналогичным образом при использовании RFID-метки она должна быть расположена в месте, в котором она может быть считана RFID-устройством считывания.
Прицеп крепится (этап 406) к буксирующему транспортному средству, после чего происходит запуск (этап 408) системы ТВА. Система ТВА может быть инициирована водителем с помощью человекомашинного интерфейса. В качестве альтернативы система ТВА может быть инициирована после обнаружения прицепа во время его подсоединения к транспортному средству. После инициирования системы ТВА контроллер подает команду устройству считывания на считывание (этап 410) метки. Метка считывается (этап 410) либо с помощью RFID-устройства считывания на транспортном средстве, либо с помощью камеры заднего обзора.
Соответствующая информация о прицепе передается (этап 412) в систему ТВА. Если прицеп был ранее сохранен (этап 414) на запоминающем устройстве, система ТВА отобразит (этап 416) известный идентифицированный прицеп, а водитель сможет подтвердить правильность идентификации прицепа для использования с целью настройки (этап 418) системы ТВА. Если же прицеп является новым прицепом (этап 414), водителю будет предложено ввести название и сохранить (этап 420) конфигурацию прицепа. В качестве альтернативы название прицепа может предварительно считываться с RFID метки или QRC-метки и автоматически считываться и сохраняться в системе помощи при движении задним ходом с прицепом после обнаружения метки, идентифицирующей новый прицеп. После идентификации присоединенного прицепа и настройки (этап 418) системы помощи при движении задним ходом с прицепом с помощью соответствующих значений параметров прицепа может быть выполнено включение (этап 422) системы помощи при движении задним ходом с прицепом.
Способ, в котором выполняется идентификация прицепа и применение известной конфигурации прицепа для системы помощи при движении задним ходом с прицепом, является предпочтительным по многим причинам. Например, система помощи при движении задним ходом с прицепом может быть инициирована и откалибрована во время подсоединения конкретного буксируемого прицепа. Данная система также передает идентификационные данные о прицепе в другие системы буксировки прицепа, например, на встроенный контроллер тормозов прицепа, который отслеживает и сохраняет соответствующие данные о буксируемом прицепе, например пробег, среднюю скорость, максимальную скорость и т.д. Данные, собранные при помощи указанного способа, полезны при планировании технического обслуживания и повышении общей производительности прицепа и буксирующего транспортного средства.
В вышеизложенном описании было представлено несколько конкретных примеров осуществления настоящего изобретения. Однако следует понимать, что можно выполнить различные изменения и модификации без отступления от сущности изобретения, которая точно определена формулой изобретения. Описание и чертежи приведены в качестве примера и не должны рассматриваться в качестве ограничения, модификации должны быть включены в объем настоящего изобретения. Следовательно, объем изобретения должен определяться формулой изобретения и другими юридическими эквивалентами.
Например, этапы способа или процесса могут быть выполнены в любой последовательности и не должны ограничиваться конкретной последовательностью, представленной в формуле изобретения. Уравнения могут быть реализованы с учетом использования фильтра для минимизации влияния сигнальных шумов. Кроме того, компоненты и/или элементы, указанные для любых заявленных механизмов могут быть собраны или функционально сконфигурированы в различных комбинациях, а следовательно, не ограничены указанной конфигурацией.
Выше были описаны преимущества и другие преимущественные особенности в отношении конкретных вариантов осуществления изобретения. Однако любые преимущества и решения или любые элементы, которые могут привести к достижению или усилению эффективности других преимуществ и решений не должны рассматриваться, как критичные, обязательные или важные средства или компоненты каких-либо или всех пунктов формулы изобретения.
Термины «включают в себя», «включает в себя», «имеет», «содержит» или другие их формы не должны рассматриваться как исключительные положения. Например, процесс, способ, изделие, состав или прибор, которые имеют список элементов, могут содержать не только обозначенные элементы, но также могут содержать другие элементы, неявно выраженные или присущие такому процессу, способу, изделию, составу или устройству. Другие комбинации и/или модификации вышеуказанных конструкций, приложений, конфигураций, отношений, элементов, материалов или компонентов, используемых в практике согласно настоящему изобретению, в дополнение к неявно указанным, могут отличаться или соответствовать конкретным условиям, производственным спецификациям, параметрам конструкции или другим эксплуатационным требованиям без отступления от основных принципов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОЦЕНКИ ФАКТИЧЕСКОГО УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2600178C2 |
| СИСТЕМА И СПОСОБ КАЛИБРОВКИ СИСТЕМЫ ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2015 |
|
RU2584372C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2608786C2 |
| СИСТЕМА И СПОСОБ ПОМОЩИ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2574042C1 |
| СПОСОБ И СИСТЕМА ДЛЯ КОНТРОЛЯ РАЗМЕЩЕНИЯ МЕТКИ НА ПРИЦЕПЕ ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2574505C1 |
| СИСТЕМА ПОМОЩИ ПРИ ДВИЖЕНИИ ТРАНСПОРТНОГО СРЕДСТВА ЗАДНИМ ХОДОМ С ПРИЦЕПОМ | 2015 |
|
RU2627219C2 |
| СИСТЕМА И СПОСОБ КОНТРОЛЯ СОЕДИНЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ПРИЦЕПОМ | 2014 |
|
RU2573691C1 |
| УЗЕЛ ДАТЧИКА УГЛА СЦЕПКИ | 2015 |
|
RU2613123C2 |
| Мобильная система помощи водителю автомобиля с прицепом при маневрировании задним ходом | 2018 |
|
RU2694645C1 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ УГЛА СЦЕПКИ МЕЖДУ ТРАНСПОРТНЫМ СРЕДСТВОМ И ПРИЦЕПОМ | 2015 |
|
RU2617895C2 |




Изобретение относится к системе помощи при движении задним ходом с прицепом. Система помощи при движении задним ходом с прицепом в транспортном средстве включает в себя контроллер, считываемую метку, прикрепленную к прицепу и хранящую значения параметров прицепа, и устройство считывания. Устройство считывания расположено на транспортном средстве и выполнено с возможностью извлечения данных и их передачи на контроллер для настройки системы помощи, используя полученные данные. Достигается повышение возможности помощи водителю при управлении транспортным средством с прицепом. 6 з.п. ф-лы, 5 ил.
1. Система помощи при движении задним ходом с прицепом в транспортном средстве, имеющем присоединенный к нему прицеп, которая включает в себя контроллер, считываемую метку, прикрепленную к прицепу и хранящую значения параметров прицепа, и устройство считывания, расположенное на транспортном средстве и выполненное с возможностью извлечения данных и их передачи на контроллер для настройки системы помощи, используя полученные данные.
2. Система по п. 1, в которой считываемая метка представляет собой радиочастотную идентификационную метку, а устройство считывания представляет собой радиочастотное идентификационное устройство считывания.
3. Система по п. 1, в которой считываемая метка содержит изображение двумерного кода, а устройство считывания представляет собой камеру заднего обзора.
4. Система по п. 1, в которой считываемая метка является настраиваемой.
5. Система по п. 1, которая выполнена с возможностью активации, когда она настроена с помощью данных, считанных с метки.
6. Система по п. 1, в которой контроллер содержит запоминающее устройство, на котором могут быть сохранены данные со значениями параметров прицепа, и выполнен с возможностью идентифицировать данные с запоминающего устройства и, используя сохраненные данные настраивать систему помощи, после присоединения прицепа к буксирующему транспортному средству и извлечения данных с метки с помощью устройства считывания.
7. Система по п. 6, которая выполнена с возможностью активации, когда она настроена с помощью полученных данных.
| US 2012200706 A1, 09.08.2012 | |||
| US 2008303648 A1, 11.12.2008 | |||
| US 2012271515 A1, 25.10.2012 | |||
| WO 2012103193 A1, 02.08.2012 | |||
| US 2010324770 A1, 23.12.2010. |

