Изобретение относится к области исследования динамики мобильных машин, например автомобилей или тракторов, данные по которым могут быть использованы при разработке систем управления, и может применяться при эксплуатации строительной техники и наземных транспортно-технологических средств на заданных территориях.
Известен способ определения положения мобильной машины во время движения, включающий использование гироскопического полукомпаса, установленного на мобильной машине, измерение угловых отклонений продольной оси мобильной машины от заданного направления движения и углов поворота рулевого колеса (Цимбалин В.Б. Испытания автомобилей / В.Б. Цимбалин, Кравец В.Н., С.М. Кудрявцев, И.Н. Успенский, В.И. Песков. - М.: Машиностроение, 1978. - С. 83).
К числу недостатков данного способа относятся ограниченные возможности исследования динамики движения мобильной машины посредством определения курсового угла, так как при этом отсутствует возможность определения поперечных смещений мобильной машины, при которых курсовой угол не изменяется; низкая точность определения угловых отклонений мобильной машины вследствие влияния суточного вращения Земли на показания гироскопического полукомпаса.
Известен способ определения положения мобильной машины при движении, включающий использование электромагнитного излучения, полученного от передатчика спутниковой навигационной системы и воспринимаемого принимающим устройством, снабженным антеннами, установленными на концах жестких штанг в точках мобильной машины, не лежащих на одной прямой, определение траектории движения и положения мобильной машины в пространстве для каждого момента проведения измерения координат путем определения координат положения не менее трех антенн, определение координат различных точек мобильной машины при движении относительно неподвижной системы отсчета на основании положения данных антенн (патент US 6671587, МПК G01C 21/00).
Наиболее близким к предлагаемому изобретению по технической сущности и достигаемому результату (прототипом) является способ определения положения мобильной машины при движении, включающий использование электромагнитного излучения, полученного от передатчика спутниковой навигационной системы и воспринимаемого принимающим устройством, снабженным антеннами, установленными на концах жестких штанг в точках мобильной машины, не лежащих на одной прямой, определение траектории движения и положения мобильной машины в пространстве для каждого момента проведения измерения координат путем определения координат положения не менее трех антенн принимающего устройства, определение координат положения мобильной машины и ее продольной оси, то есть курсовой угол мобильной машины при движении относительно неподвижной системы отсчета на основании положения данных антенн. При этом жесткие штанги закрепляют на мобильной машине вне ее габаритных размеров (патент RU 2288451, МПК G01C 21/00 (2006.01)).
Общими основными недостатками вышеприведенных способов, описанных в патенте US 6671587, являющемся аналогом, и в патенте RU 2288451, выбранном в качестве прототипа, являются невысокая точность определения положения мобильной машины при движении из-за большого расстояния прохождения импульсов электромагнитного излучения от спутников космической навигационной системы, связанного с образованием различного типа помех, а также повышенная трудоемкость исполнения оборудования, реализующего способ, вследствие использования спутниковой навигационной системы. При этом дополнительное применение для повышения точности систем базовых станций связано с удорожанием и усложнением спутниковых навигационных систем.
Задачей предлагаемого изобретения является повышение точности определения положения мобильной машины при движении и снижение трудоемкости изготовления применяемого оборудования для реализации способа.
Поставленная задача достигается тем, что в способе определения положения мобильной машины на плоскости путем использования электромагнитного излучения, полученного от передатчика и воспринимаемого принимающим устройством, установленным на движущейся мобильной машине, и определения координат мобильной машины, согласно изобретению предварительно устанавливают по краям участка перемещения мобильной машины не менее двух уголковых отражателей с индивидуальными фильтрами излучения, с заранее известным расположением относительно участка. Затем производят передачу первичного импульса электромагнитного излучения, являющегося импульсом света, в плоскости движения мобильной машины от передатчика, в качестве которого используют точечный источник света, установленного на мобильной машине, и регистрацию первичного импульса датчиком первого типа, установленным на мобильной машине, последующее восприятие отраженного импульса электромагнитного излучения от уголковых отражателей с индивидуальными фильтрами излучения через принимающее устройство, в качестве которого используют преимущественно объектив типа «рыбий глаз» или линзу Френеля, для концентрации излучения, установленное на мобильной машине, и регистрацию отраженных импульсов, имеющих разную частоту, полученных от уголковых отражателей с индивидуальными фильтрами излучения, датчиками второго типа, установленными на мобильной машине. Далее определяют время между появлением первичного импульса и появлением отраженных импульсов от уголковых отражателей с индивидуальными фильтрами излучения, и при известных значениях времени появления импульсов находят расстояние от мобильной машины до уголковых отражателей и соответственно координаты машины на плоскости.
Повышение точности определения положения мобильной машины при движении обусловлено значительным уменьшением расстояния прохождения импульсов электромагнитного излучения от передатчика к принимающему устройству путем передачи и регистрации импульса света в плоскости движения мобильной машины от передатчика, установленного на мобильной машине, а также последующего восприятия и регистрации отраженного импульса света от уголковых отражателей с индивидуальными фильтрами излучения, которые предварительно устанавливают на заданном расстоянии по краям участка перемещения мобильной машины, принимающим устройством, также установленным на мобильной машине.
Снижение трудоемкости изготовления применяемого оборудования для реализации способа определения положения мобильной машины на плоскости обусловлено получением импульса электромагнитного излучения, являющегося импульсом света, от передатчика, в качестве которого используют точечный источник света, установленного на мобильной машине, восприятием отраженного импульса света от уголковых отражателей через принимающее устройство, в качестве которого используют преимущественно объектив типа «рыбий глаз» или линзу Френеля, для концентрации излучения, также установленное на мобильной машине, при отсутствии необходимости применения сложной дорогостоящей спутниковой навигационной системы для получения импульса электромагнитного излучения.
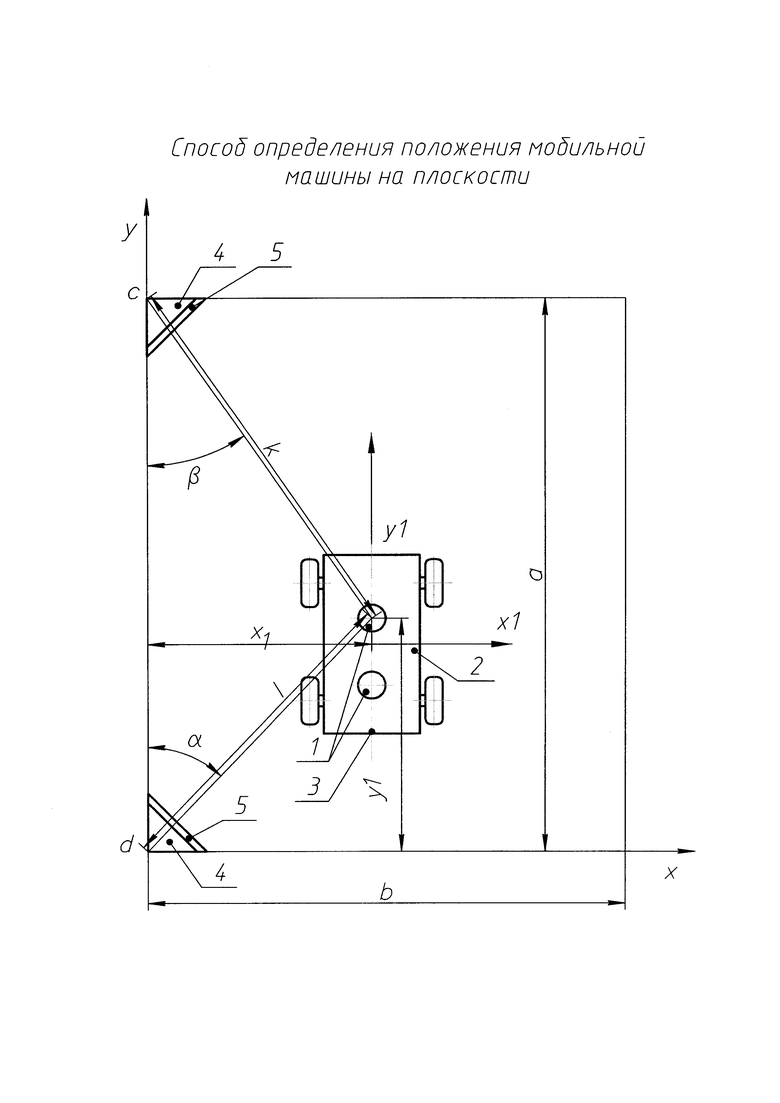
Предлагаемое изобретение поясняется чертежом, на котором изображена схема реализации способа определения положения мобильной машины на плоскости.
Кроме того, на чертеже дополнительно показано следующее:
- OXY - неподвижная система отсчета;
- O1X1Y1 - подвижная система отсчета, жестко связанная с мобильной машиной;
- а - размер участка перемещения мобильной машины по оси y;
- b - размер участка перемещения мобильной машины по оси x;
- с, d - точки установки уголковых отражателей по краям участка перемещения мобильной машины;
- k - расстояние от уголкового отражателя, установленного в точке с, до измерительного устройства, установленного на мобильной машине;
- l - расстояние от уголкового отражателя, установленного в точке d, до измерительного устройства, установленного на мобильной машине;
- α - угол между осью Y неподвижной системы отсчета OXY и линией, соединяющей точку d установки уголкового отражателя;
- β - угол между осью Y неподвижной системы отсчета OXY и линией, соединяющей точку с установки уголкового отражателя.
Способ определения положения мобильной машины на плоскости заключается в том, что предварительно устанавливают по краям участка перемещения мобильной машины не менее двух уголковых отражателей с индивидуальными фильтрами излучения, с заранее известным расположением относительно участка, затем производят передачу первичного импульса используемого электромагнитного излучения, являющегося импульсом света, в плоскости движения мобильной машины, полученного от передатчика, в качестве которого используют точечный источник света, установленного на мобильной машине. Регистрируют первичный импульс датчиком первого типа, установленным на мобильной машине. Производят последующее восприятие отраженного импульса электромагнитного излучения от уголковых отражателей с индивидуальными фильтрами излучения через принимающее устройство, в качестве которого используют преимущественно объектив типа «рыбий глаз» или линзу Френеля, для концентрации излучения, установленное на мобильной машине. Регистрируют отраженные импульсы, имеющие разную частоту, полученные от уголковых отражателей с индивидуальными фильтрами излучения, датчиками второго типа, установленными на мобильной машине. Далее определяют время между появлением первичного импульса и появлением отраженных импульсов от уголковых отражателей с индивидуальными фильтрами излучения. При известных значениях времени появления импульсов находят расстояние от мобильной машины до уголковых отражателей и соответственно координаты машины на плоскости.
Способ определения положения мобильной машины на плоскости реализуется при помощи измерительного устройства 1, содержащего передатчик с датчиком первого типа, принимающее устройство с датчиками второго типа и блок управления на базе компьютера, связанный с передатчиком и принимающим устройством (на чертеже не показаны), и жестко закрепленного на мобильной машине 2 с продольной осью 3, уголковыми отражателями 4 с индивидуальными оптическими фильтрами 5 излучения, имеющими различные цвета, соответствующие цветам фильтров на датчиках второго типа. Количество принимающих устройств равно числу уголковых отражателей 4.
Способ определения положения мобильной машины на плоскости осуществляется следующим образом.
По краям участка местности движения мобильной машины 2 устанавливают не менее двух уголковых отражателей 4 с индивидуальными фильтрами 5 излучения, с заранее известным расположением относительно участка.
При движении мобильной машины 2 производят передачу первичного импульса электромагнитного излучения, являющегося импульсом света, в плоскости движения мобильной машины 2 от передатчика, в качестве которого используют точечный источник света, установленного на мобильной машине, 2 и регистрацию первичного импульса датчиком первого типа, установленным на мобильной машине 2. Световой поток распространяется в круговом направлении.
Затем производят восприятие отраженного импульса электромагнитного излучения от уголковых отражателей 4 с индивидуальными фильтрами 5 излучения через принимающее устройство, в качестве которого используют, например, объектив типа «рыбий глаз» или линзу Френеля, для концентрации излучения, установленное на мобильной машине 2, и регистрацию отраженных импульсов, имеющих разную частоту, полученных от уголковых отражателей 4 с индивидуальными фильтрами 5 излучения, датчиками второго типа, установленными на мобильной машине 2. Таким образом, часть светового потока воспринимается уголковыми отражателями 4 и возвращается в виде отраженного импульса в зону расположения передатчика с частотой, обусловленной установленным на нем индивидуальным фильтром 5 определенного цвета; отраженный импульс принимается датчиками второго типа и передается в блок управления.
Далее определяют время между появлением первичного импульса и появлением отраженных импульсов от уголковых отражателей 4 с индивидуальными фильтрами 5 излучения, что реализуется блоком управления. По частоте отраженного импульса судят, от какого уголкового отражателя 4 он вернулся.
При известных значениях времени появления импульсов находят расстояние от мобильной машины 2 до уголковых отражателей 4 с индивидуальными фильтрами 5 излучения. Величины расстояний от измерительного устройства 1, установленного на мобильной машине 2, до уголковых отражателей 4 с индивидуальными фильтрами 5 излучения определяют координаты измерительного устройства в неподвижной системе отсчета OXY по формулам:

где k - расстояние от уголкового отражателя, установленного в точке с, до измерительного устройства, установленного на мобильной машине;
С - скорость распространения света;
Тс - время прохождения импульса света от измерительного устройства, установленного на мобильной машине, до уголкового отражателя, установленного в точке с, и обратно;

где l - расстояние от уголкового отражателя, установленного в точке d, до измерительного устройства, установленного на мобильной машине;
Td - время прохождения импульса света от измерительного устройства, установленного на мобильной машине, до уголкового отражателя, установленного в точке d, и обратно.
Потом находят по нижеприведенной зависимости координаты машины 2 на плоскости:

где x1 - координата мобильной машины по оси х;
y1 - координата мобильной машины по оси y;

где а - размер участка перемещения мобильной машины по оси y.
Установка дополнительно одного или нескольких измерительных устройств 1 позволит определить ориентацию продольной оси 3 мобильной машины 2 относительно неподвижной системы координат ХОУ. Угол наклона продольной оси 6 относительно оси ОХ определяют из следующего соотношения:

Также для определения положения продольной оси мобильной машины возможна установка дополнительно одного или нескольких измерительных устройств с другими частотами излучения.
Таким образом, использование предлагаемого изобретения по сравнению с прототипом обеспечивает повышение точности определения положения мобильной машины при движении и снижение трудоемкости изготовления оборудования для реализации способа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система бесконтактного определения координат мобильного робота и способ для ее реализации | 2021 |
|
RU2769636C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2529732C1 |
| ПОЛЯРИЗАЦИОННО-МОДУЛЯЦИОННЫЙ СПОСОБ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ УГЛА КРЕНА ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2537384C1 |
| Система автономного лазерного определения координат БВС без использования модулей GPS/ГЛОНАСС | 2019 |
|
RU2723692C1 |
| СПОСОБ КАЛИБРОВКИ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ПО ВЕЛИЧИНЕ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ПРИ ПРОВЕДЕНИИ ДИНАМИЧЕСКИХ ИЗМЕРЕНИЙ ЭФФЕКТИВНОЙ ПОВЕРХНОСТИ РАССЕЯНИЯ ИССЛЕДУЕМЫХ ОБЪЕКТОВ | 2011 |
|
RU2477495C1 |
| Способ радиолокационного определения угла тангажа летательного аппарата | 2024 |
|
RU2831987C1 |
| ПРИЕМОПЕРЕДАЮЩЕЕ УСТРОЙСТВО ЛАЗЕРНОГО ЛОКАТОРА | 1986 |
|
RU2048686C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В НОЧНОЕ ВРЕМЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2238882C2 |
| СПОСОБ И СИСТЕМА ОПРЕДЕЛЕНИЯ АНТЕННЫХ ХАРАКТЕРИСТИК НА ИЗМЕРИТЕЛЬНОЙ ПЛОЩАДКЕ | 2023 |
|
RU2804836C1 |
| Способ радиолокационного определения угла крена летательного аппарата | 2024 |
|
RU2838044C1 |
Способ определения положения мобильной машины на плоскости основан на определении положения мобильной машины на плоскости путем использования электромагнитного излучения, полученного от передатчика и воспринимаемого принимающим устройством, установленным на движущейся мобильной машине, и определения координат мобильной машины. Устанавливают по краям участка перемещения машины не менее двух уголковых отражателей с индивидуальными фильтрами излучения. Передают первичный импульс излучения. Регистрируют первичный импульс датчиком первого типа, установленным на машине. Производят последующее восприятие отраженного импульса электромагнитного излучения от уголковых отражателей с индивидуальными фильтрами излучения через принимающее устройство. Определяют время между появлением первичного импульса и появлением отраженных импульсов от уголковых отражателей, и при известных значениях времени появления импульсов находят расстояние от машины до уголковых отражателей и координаты машины на плоскости. Технический результат заключается в повышении точности определения положения мобильной машины при движении и снижении трудоемкости изготовления применяемого оборудования для реализации способа. 1 ил.
Способ определения положения мобильной машины на плоскости путем использования электромагнитного излучения, полученного от передатчика и воспринимаемого принимающим устройством, установленным на движущейся мобильной машине, и определения координат мобильной машины, отличающийся тем, что предварительно устанавливают по краям участка перемещения мобильной машины не менее двух уголковых отражателей с индивидуальными фильтрами излучения, с заранее известным расположением относительно участка, затем производят передачу первичного импульса электромагнитного излучения, являющегося импульсом света, в плоскости движения мобильной машины от передатчика, в качестве которого используют точечный источник света, установленного на мобильной машине, и регистрацию первичного импульса датчиком первого типа, установленным на мобильной машине, последующее восприятие отраженного импульса электромагнитного излучения от уголковых отражателей с индивидуальными фильтрами излучения через принимающее устройство, в качестве которого используют преимущественно объектив типа «рыбий глаз» или линзу Френеля, для концентрации излучения, установленное на мобильной машине, и регистрацию отраженных импульсов, имеющих разную частоту, полученных от уголковых отражателей с индивидуальными фильтрами излучения, датчиками второго типа, установленными на мобильной машине, далее определяют время между появлением первичного импульса и появлением отраженных импульсов от уголковых отражателей с индивидуальными фильтрами излучения, и при известных значениях времени появления импульсов находят расстояние от мобильной машины до уголковых отражателей и соответственно координаты машины на плоскости.
| JP 2001074458 A 23.03.2001 | |||
| US 4796198 A1 03.01.1989 | |||
| KR 1020090053128 A 27.05.2009 | |||
| МОБИЛЬНЫЙ РОБОТ И СПОСОБ КОРРЕКТИРОВКИ ЕГО КУРСА | 2001 |
|
RU2210492C2 |

