Предлагаемое изобретение относится к робототехнике и предназначено для определения пространственного положения мобильного робота, перемещающегося по прямоугольной площадке, поднятой над уровнем земли (пола), и может быть использовано при проведении неразрушающего контроля различных объектов в форме параллелепипеда, например, стальных слябов.
В настоящее время известны различные устройства и способы определения пространственного положения мобильного робота, перемещающегося по прямоугольной поверхности, однако они обладают не достаточной точностью измерений, имеют достаточно сложные схемы их реализации, в которых используется достаточно дорогое оборудование.
Так известен способ определения положения мобильной машины на плоскости по патенту РФ на ИЗ №2608792, МПК G01C 21/04.
Данный способ основан на определении положения мобильной машины на плоскости путем использования электромагнитного излучения, полученного от передатчика и воспринимаемого принимающим устройством, установленным на движущейся мобильной машине, и определения координат мобильной машины.
Для этого устанавливают по краям участка перемещения машины не менее двух уголковых отражателей с индивидуальными фильтрами излучения. Сначала передают первичный импульс излучения, регистрируют его датчиком первого типа, установленным на машине. Затем производят последующее восприятие отраженного импульса электромагнитного излучения от уголковых отражателей с индивидуальными фильтрами излучения через принимающее устройство, определяют время между появлением первичного импульса и появлением отраженных импульсов от уголковых отражателей, и при известных значениях времени появления импульсов находят расстояние от машины до уголковых отражателей и координаты машины на плоскости.
Недостатком данного способа является высокая стоимость оборудования, так как для реализации данной системы и точного измерения необходимы датчики первого и второго типа, а также вычислительный комплекс с возможностью регистрации принятого импульса каждую наносекунду.
Известны также устройство и способ для определения положения объекта для мобильного робота по патенту РФ на ИЗ №2304423, МПК A47L 9/00.
Данное устройство содержит первый и второй оптические датчики для определения первой и второй областей бампера мобильного робота, микрокомпьютер для формирования управляющего сигнала для движения робота, на основании сигналов, поступающих в него с первого и второго оптических датчиков.
Недостаток данного способа и устройства заключается в том, что для его реализации необходима конструкция со стенами (препятствиями), что значительно повышает его стоимость, имеет ограниченную область применения.
Наиболее близкими к данному изобретению по технической сущности является способ определения пространственного положения и угловой ориентации тележки транспортного средства по патенту РФ на ИЗ №203240, МПК G01C 21/04, выбранный в качестве прототипа.
Данный способ заключается в установке трех статических маяков на местности с заданной абсолютной декартовой системой координат, в которой две оси направлены параллельно плоскости перемещения тележки, а одна ось перпендикулярна ей. Их центры с известными абсолютными координатами располагают в плоскости перемещения тележки, на тележке выбирают локальную декартову систему координат с центром, находящимся на заданной высоте по отношению к плоской поверхности, и устанавливают на тележке три датчика. Определяют углы склонения относительно локальной плоскости перемещения тележки и углы поворота относительно этой плоскости положения маяков, после чего рассчитывают приближенные абсолютные координаты центра тележки и угла поворота тележки вокруг вертикальной оси при допущении, что датчики находятся в центре тележки, а затем при начальном приближении определяют уточненные абсолютные координаты центра тележки и углы поворота тележки вокруг трех осей путем итерационного численного решения системы уравнений.
В данном способе используется 3 датчика и 3 маяка. Перед началом сканирования, для точного определения положения, положения всех трех маяков должны быть точно известны во всех трех измерениях, что значительно усложняет процесс, так как ошибка в измерениях одной координаты одного маяка приведет к общей ошибке измерений, и для каждого нового объекта необходимо заново выставлять маяки и измерять координаты.
Недостатками данного способа является сложность конструкции всей системы для определения пространственного положения объекта, а также недостаточная точность определения координат.
Задачей предложенного изобретения является создание такой системы бесконтактного определения координат мобильного робота, а также способа ее реализации, которая обеспечивает значительное повышение точности определения координат робота при одновременном упрощении системы и уменьшении ее стоимости.
Техническим результатом данного изобретения является повышение точности определения положения робота при одновременном обеспечении упрощения конструкции системы.
Поставленный технический результат достигается за счет того, что система бесконтактного определения координат мобильного робота, перемещающегося по прямоугольной площадке, содержит передатчик излучающего сигнала, установленный на корпусе робота, а также не менее двух приемников излучающего сигнала, каждый из которых установлен в соседних углах прямоугольной площадки для перемещения робота, при этом передатчик излучающего сигнала и каждый из приемников излучающего сигнала подключены к контроллеру, выполненному с возможностью обработки переданных сигналов передатчиком излучающего сигнала и полученных сигналов приемниками излучающего сигнала, и определения по их показателям координат нахождения робота, а также система содержит стойки, установленные в углах прямоугольной площадки для перемещения робота, на каждой из которых установлен оптический приемник сигналов в виде фотоэлемента, а также серводвигатель с энкодером на валу, который установлен на корпусе робота, и подключен к контроллеру, а в качестве передатчика излучающих сигналов используют лазерный источник с линзой для получения лазерной линии, сканирующей пространство вокруг передатчика, при этом лазерный источник установлен на другой стороне вала, а каждый фотоэлемент подключен к дискретным входам контроллера, и выполнен с возможностью фиксации угла срабатывания данного фотоэлемента и передачи его для обработки в контроллер.
Предпочтительно, чтобы в системе бесконтактного определения координат мобильного робота лазерный источник был выполнен в виде лазерной указки.
Целесообразно, чтобы система бесконтактного определения координат мобильного робота содержала два фотоэлемента, каждый из которых установлен на соответствующей стойке.
Желательно, чтобы в системе бесконтактного определения координат мобильного робота в качестве контроллера был использован программируемый логический контроллер (PLC), а в качестве прямоугольной площадки для перемещения робота был использован стальной сляб.
Поставленный технический результат достигается также за счет того, что способ бесконтактного определения координат мобильного робота, перемещающегося по прямоугольной площадке, путем использования излучения, полученного от передатчика, установленного на движущемся роботе, и воспринимаемого принимающими устройствами, установленными в углах площадки для перемещения робота, предусматривающий установку передатчика сигнала на корпусе робота, а также установку, по меньшей мере, двух приемников сигнала, каждый из которых устанавливают в углу прямоугольной площадки для перемещения робота, при этом передатчик сигнала и каждый из приемников сигнала подключают к контроллеру, выполненному с возможностью обработки сигналов, переданных передатчиком и полученных приемниками, и определения по их показателям координат нахождения робота, заключается в том, что определяют положение робота путем передачи и приема оптического излучения, которое передают при помощи передатчика сигнала в виде лазерного источника с линзой, путем его сканирования всей поверхности площадки для перемещения робота, совершая сначала поворот по часовой стрелке на 360°, а затем поворот против часовой стрелки на 360°, а получают при помощи приемников сигналов, в виде фотоэлементов, каждый из которых размещен на стойке, установленной в каждом углу прямоугольной площадки для перемещения робота, и подключен к дискретным входам контроллера, при этом на робот устанавливают двигатель с абсолютным энкодером, подключенным к контроллеру, а на валу двигателя устанавливают лазерный источник с линзой, после чего, при вращении двигателя, по показаниям энкодера, получают угол, куда направлен лазерный источник с линзой, а при помощи фотоэлементов, фиксируют угол срабатывания каждого фотоэлемента, при прохождении по нему луча лазерного источника, и передают полученные данные в контроллер, где по полученным углам определяют текущие координаты робота.
Предпочтительно, чтобы в способе бесконтактного определения координат мобильного робота в качестве контроллера был использован программируемый логический контроллер (PLC), а в качестве прямоугольной площадки для перемещения робота был использован стальной сляб.
Для более полного раскрытия изобретения далее приводится описание конкретного возможного варианта его исполнения, которое поясняется соответствующими чертежами.
Фиг. 1 - система бесконтактного определения координат мобильного робота.
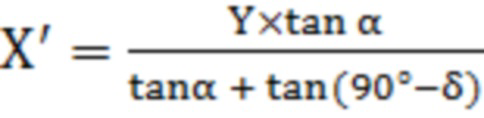
Фиг. 2 - расположение робота на верхней грани сляба, относительно нулевого угла и системы координат.
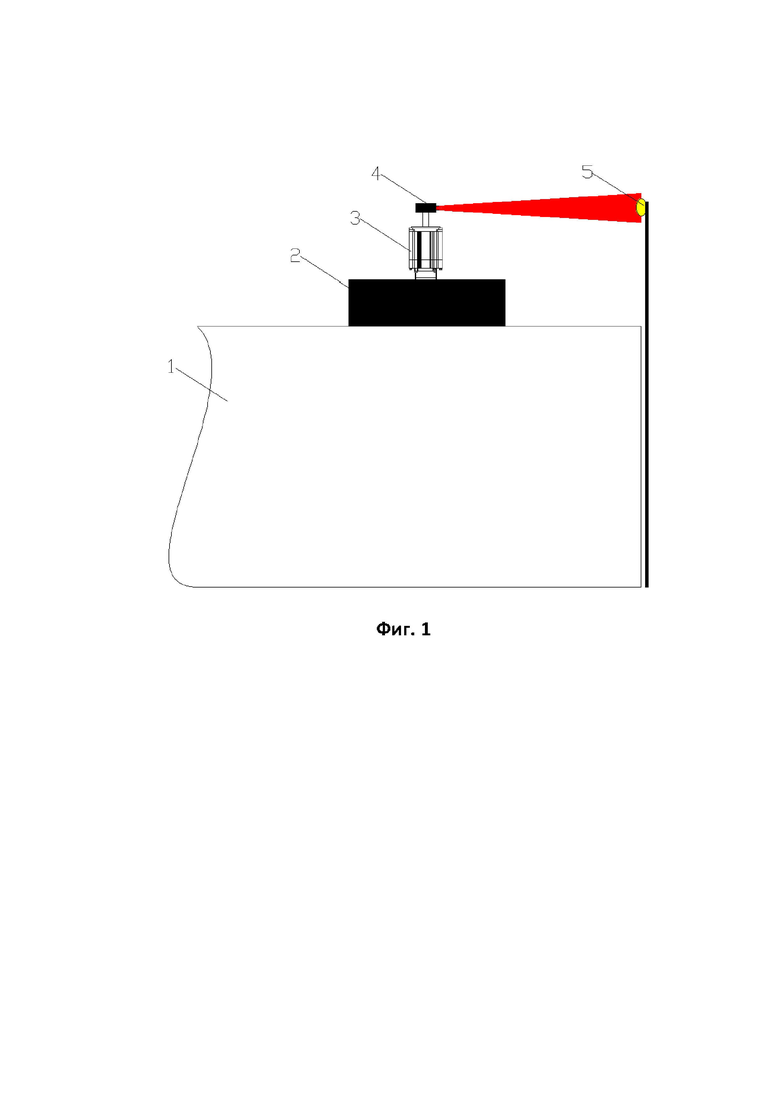
Фиг. 3 - изображение направления лазерной линии в системе координат.
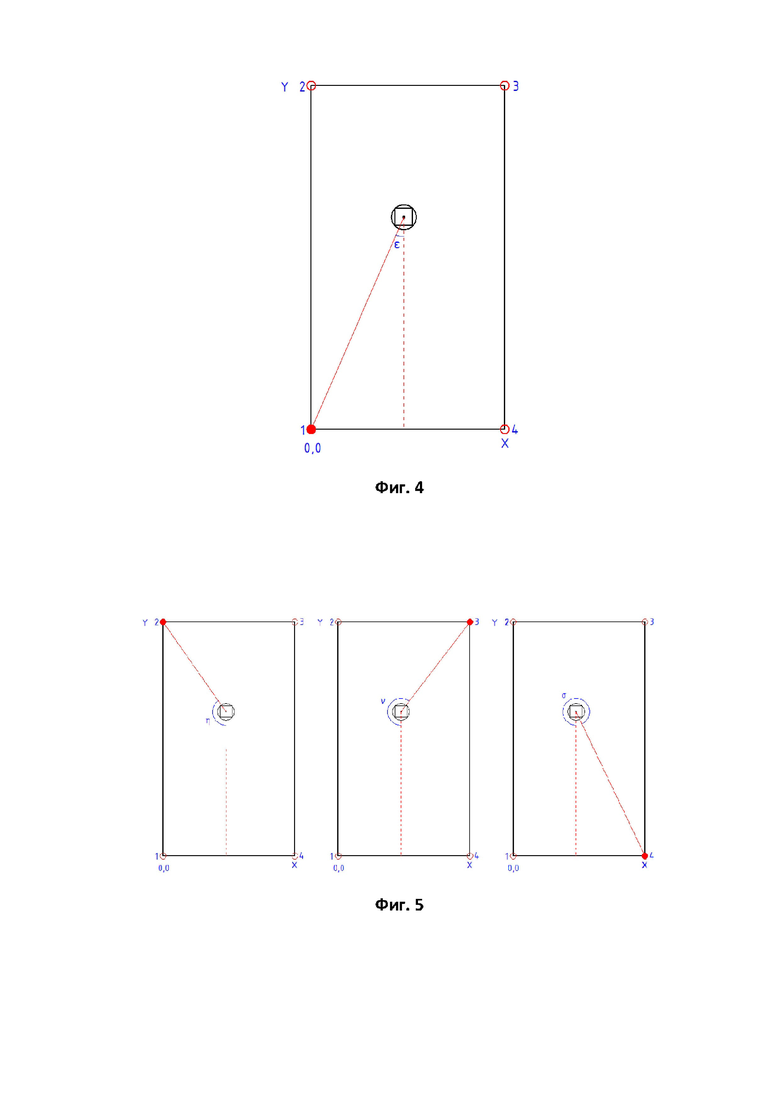
Фиг. 4 - определение угла ε по срабатыванию первого фотоэлемента.
Фиг. 5 - определение углов η, ν, σ по срабатыванию второго, третьего и четвертого фотоэлементов.
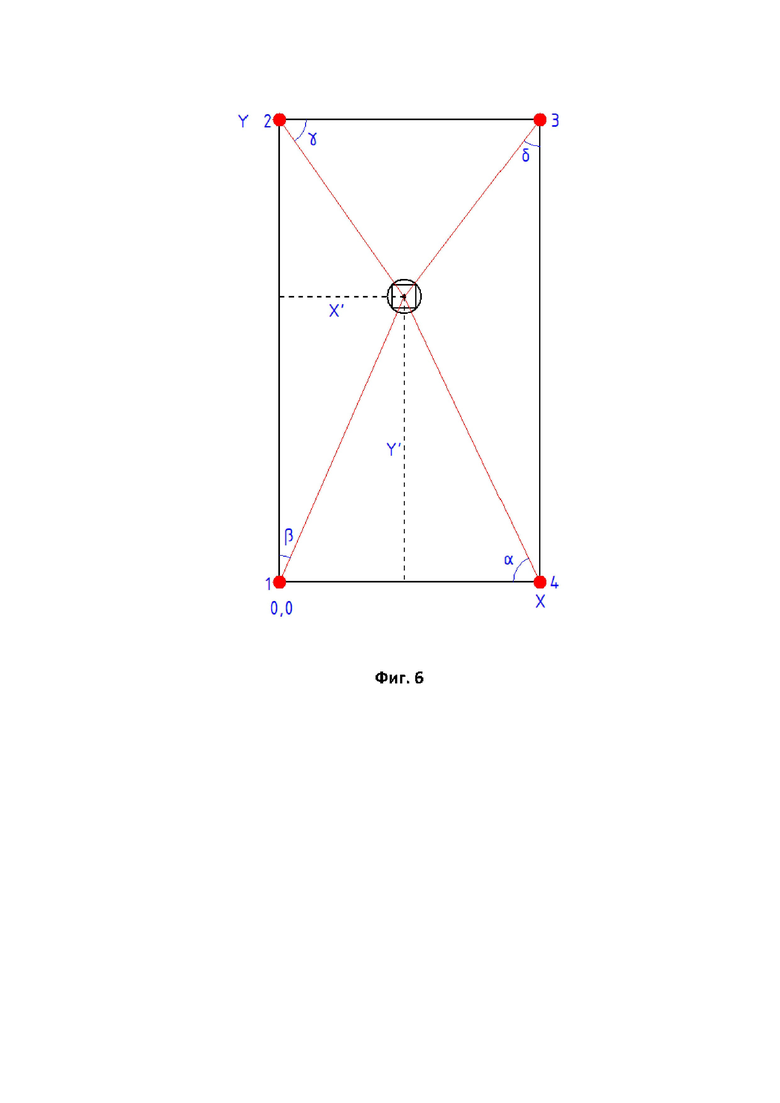
Фиг. 6 - определение углов α, β, γ, δ и координат робота X' и Y'.
Один из предпочтительных вариантов выполнения системы бесконтактного определения координат мобильного робота содержит мобильный робот 2, установленный на прямоугольной площадке 1, предпочтительно поверхности сляба, при этом, на корпусе робота 2 установлен серводвигатель 3 с энкодером на валу, а также источник излучающего сигнала 4 в виде лазерной указки (Фиг. 1).
В каждом углу прямоугольной площадки 1 установлена стойка, на которой размещен приемник излучающего сигнала в виде фотоэлемента 5, каждый из которых установлен в углу прямоугольной площадки 1 для перемещения робота 2. Источник излучающего сигнала 4 в виде лазерной указки, и каждый из фотоэлементов 5 подключены к контроллеру (на чертеже не показан), который обрабатывает переданные сигналы источника излучающего сигнала 4, и полученные сигналы фотоэлементами 5, и определяет по их показателям координаты нахождения робота.
В качестве передатчика излучающих сигналов 4 также может быть использован лазерный источник излучения с линзой, для получения лазерной линии, сканирующей пространство вокруг передатчика. Лазерный источник установлен на другой стороне вала серводвигателя 3, а каждый из фотоэлементов 5 подключен к дискретным входам контроллера, и выполнен с возможностью фиксации угла срабатывания данного фотоэлемента 5, и передачи его для обработки в контроллер.
В качестве контроллера используется программируемый логический контроллер (PLC), а в качестве прямоугольной площадки 1 для перемещения робота 2 используется стальной сляб (Фиг. 1).
Способ бесконтактного определения координат мобильного робота поясняется на примере работы представленной выше системы.
В исходном состоянии системы определяют положение робота 2 путем передачи и приема оптического излучения, которое передают при помощи передатчика излучающих сигналов 4 путем его сканирования всей поверхности площадки 1 для перемещения робота 2, совершая сначала поворот по часовой стрелке на 360°, а затем поворот против часовой стрелки на 360°. При этом получают, при помощи фотоэлементов 5, углы срабатывания каждого фотоэлемента 5, и передают их в контроллер PLC.
При вращении вала серводвигателя 3, по показаниям энкодера, получают угол, куда направлен лазерный передатчик излучающих сигналов 4, а при помощи фотоэлементов 5 фиксируют угол срабатывания каждого фотоэлемента 5, при прохождении по нему луча лазерного передатчика излучающих сигналов 4. Таким образом, за один поворот лазерного луча определяют четыре угла: α, β, γ, δ (Фиг. 2-5). Полученные данные передают в контроллер PLC, где по полученным углам определяют текущие координаты робота 2, в соответствии с приведенными ниже формулами.
Имея размеры прямоугольной площадки 1 (X и Y) и все углы (α, β, γ, δ), получают координаты робота (Х' и Y') по следующим расчетам (Фиг. 6):
• X' и Y' через α и β:
 ;
;
 ;
;
• X' и Y' через β и γ:
 ;
;
 ;
;
• X' и Y' через γ и δ:
 ;
;
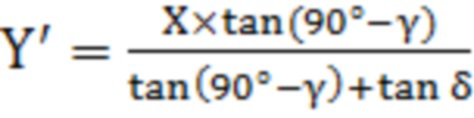 ;
;
• X' и Y' через δ и α:
 ;
;
 ;
;
Таким образом, получают координаты робота 2 из любой пары соседних углов сляба. Все расчеты производятся в программируемом логическом контроллере PLC, при прохождении робота 2 по слябу 1 при каждом повороте лазерного луча, как по часовой стрелке, так и против.
Данная система и способ ее реализации позволяют получать координаты робота 2 по любой паре углов фиксации срабатывающих фотоэлементов 5 соседних углов сляба 1, что значительно повышает точность измерения координат робота по сравнению с прототипом.
В прототипе, ошибка в измерениях одной координаты одного маяка приводит к общей ошибке измерений, и для каждого нового объекта необходимо заново выставлять маяки и измерять координаты.
Кроме того, данная система и способ ее реализации позволяют также упростить систему бесконтактного определения координат мобильного робота, по сравнению с прототипом, за счет сокращения входящих в нее элементов.
Как очевидно специалистам в данной области техники, данное изобретение легко разработать в других конкретных формах, не выходя при этом за рамки сущности данного изобретения.
При этом настоящие варианты осуществления необходимо считать просто иллюстративными, а не ограничивающими, причем объем изобретения представлен его формулой, и предполагается, что в нее включены все возможные изменения и область эквивалентности пунктам формулы данного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| СПОСОБ НАВИГАЦИИ ПОДВОДНОГО РОБОТА С ИСПОЛЬЗОВАНИЕМ ОДНОМАЯКОВОЙ СИСТЕМЫ | 2014 |
|
RU2556326C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВОДНЫХ ОБЪЕКТОВ | 2010 |
|
RU2437114C1 |
| СИСТЕМА ДЛЯ НАПРАВЛЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА | 2006 |
|
RU2323465C1 |
| Беспилотный авиационный робототехнический комплекс для внесения пестицидов | 2022 |
|
RU2779780C1 |
| МОБИЛЬНЫЙ КОМПЛЕКС ДЛЯ ДИАГНОСТИРОВАНИЯ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ | 2010 |
|
RU2442713C1 |
| СПОСОБ НАВИГАЦИОННОГО ОБЕСПЕЧЕНИЯ АВТОНОМНОГО ПОДВОДНОГО РОБОТА, КОНТРОЛИРУЕМОГО С БОРТА ОБЕСПЕЧИВАЮЩЕГО СУДНА | 2007 |
|
RU2344435C1 |
| СПОСОБ И СИСТЕМА ПОЗИЦИОНИРОВАНИЯ МОБИЛЬНОГО ТЕРМИНАЛА ВНУТРИ ЗДАНИЙ НА ОСНОВЕ ГЛОНАСС-ПОДОБНОГО СИГНАЛА | 2012 |
|
RU2533202C2 |
| МОБИЛЬНЫЙ РОБОТ С АВТОНОМНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454313C2 |
| КОНТРОЛЛЕР КИСТИ ДЛЯ ИСПОЛЬЗОВАНИЯ В КОНТРОЛЛЕРЕ ОПЕРАТОРА РОБОТОХИРУРГИЧЕСКОГО КОМПЛЕКСА | 2019 |
|
RU2716353C1 |
Изобретение относится к робототехнике и предназначено для определения пространственного положения мобильного робота, и может быть использовано при проведении неразрушающего контроля различных объектов в форме параллелепипеда, например стальных слябов. Система бесконтактного определения координат мобильного робота, перемещающегося по прямоугольной площадке, содержит передатчик излучающего сигнала, установленный на корпусе робота, а также не менее двух приемников излучающего сигнала, каждый из которых установлен в соседних углах прямоугольной площадки для перемещения робота, при этом передатчик излучающего сигнала и каждый из приемников излучающего сигнала подключены к контроллеру, выполненному с возможностью определения по их показателям координат нахождения робота, а также система содержит стойки, установленные в углах прямоугольной площадки для перемещения робота, на каждой из которых установлен оптический приемник сигналов в виде фотоэлемента, а также серводвигатель с абсолютным энкодером на валу, который установлен на корпусе робота и подключен к контроллеру. Технический результат – повышение точности определения положения робота при одновременном обеспечении упрощения конструкции системы. 2 н. и 4 з.п. ф-лы, 6 ил.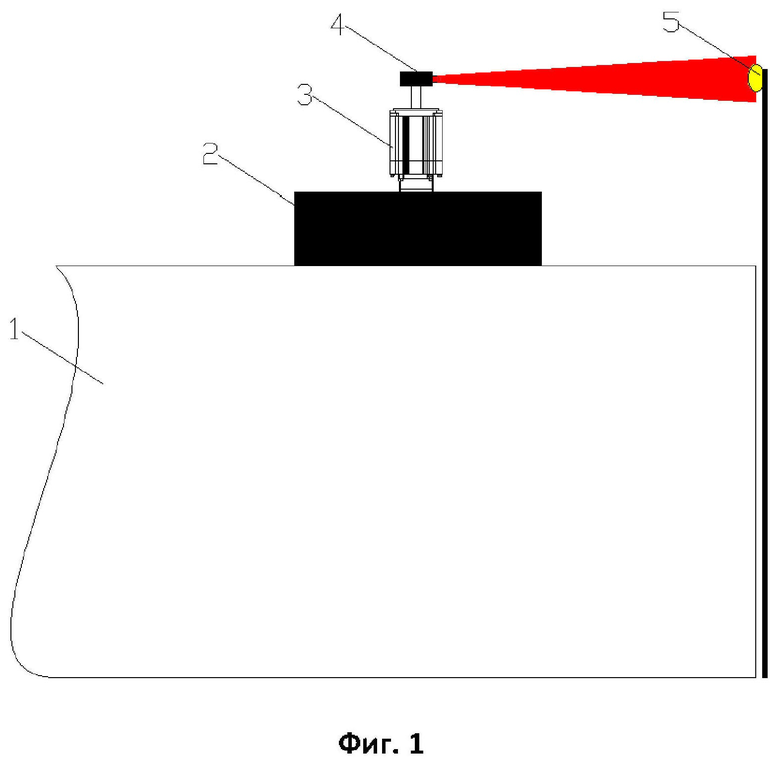
1. Система бесконтактного определения координат мобильного робота, перемещающегося по прямоугольной площадке, содержащая передатчик излучающего сигнала, установленный на корпусе робота, а также не менее двух приемников излучающего сигнала, каждый из которых установлен в соседних углах прямоугольной площадки для перемещения робота, при этом передатчик излучающего сигнала и каждый из приемников излучающего сигнала подключены к контроллеру, выполненному с возможностью обработки переданных сигналов передатчиком излучающего сигнала и полученных сигналов приемниками излучающего сигнала и определения по их показателям координат нахождения робота, отличающаяся тем, что содержит стойки, установленные в углах прямоугольной площадки для перемещения робота, на каждой из которых установлен оптический приемник сигналов в виде фотоэлемента, а также серводвигатель с энкодером на валу, который установлен на корпусе робота и подключен к контроллеру, а в качестве передатчика излучающих сигналов используют лазерный источник с линзой, для получения лазерной линии, сканирующей пространство вокруг передатчика, при этом лазерный источник установлен на другой стороне вала, а каждый фотоэлемент подключен к дискретным входам контроллера и выполнен с возможностью фиксации угла срабатывания данного фотоэлемента и передачи его для обработки в контроллер.
2. Система бесконтактного определения координат мобильного робота по п. 1, отличающаяся тем, что лазерный источник выполнен в виде лазерной указки.
3. Система бесконтактного определения координат мобильного робота по п. 1, отличающаяся тем, что содержит два фотоэлемента, каждый из которых установлен на соответствующей стойке.
4. Система бесконтактного определения координат мобильного робота по п. 1, отличающаяся тем, что в качестве контроллера используют программируемый логический контроллер (PLC), а в качестве прямоугольной площадки для перемещения робота используют стальной сляб.
5. Способ бесконтактного определения координат мобильного робота, перемещающегося по прямоугольной площадке, путем использования излучения, полученного от передатчика, установленного на движущемся роботе, и воспринимаемого принимающими устройствами, установленными в углах площадки для перемещения робота, предусматривающий установку передатчика сигнала на корпусе робота, а также установку по меньшей мере двух приемников сигнала, каждый из которых устанавливают в углу прямоугольной площадки для перемещения робота, при этом передатчик сигнала и каждый из приемников сигнала подключают к контроллеру, выполненному с возможностью обработки сигналов, переданных передатчиком и полученных приемниками, и определения по их показателям координат нахождения робота, отличающийся тем, что определяют положение робота путем передачи и приема оптического излучения, которое передают при помощи передатчика сигнала в виде лазерного источника с линзой, путем его сканирования всей поверхности площадки для перемещения робота, совершая сначала поворот по часовой стрелке на 360°, а затем поворот против часовой стрелки на 360°, а получают при помощи приемников сигналов в виде фотоэлементов, каждый из которых размещен на стойке, установленной в каждом углу прямоугольной площадки для перемещения робота, и подключен к дискретным входам контроллера, при этом на робот устанавливают двигатель с абсолютным энкодером, подключенным к контроллеру, а на валу двигателя устанавливают лазерный источник с линзой, после чего, при вращении двигателя, по показаниям энкодера получают угол, куда направлен лазерный источник с линзой, а при помощи фотоэлементов фиксируют угол срабатывания каждого фотоэлемента, при прохождении по нему луча лазерного источника, и передают полученные данные в контроллер, где по полученным углам определяют текущие координаты робота.
6. Способ бесконтактного определения координат мобильного робота по п. 5, отличающийся тем, что в качестве контроллера используют программируемый логический контроллер (PLC), а в качестве прямоугольной площадки для перемещения робота используют стальной сляб.
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ И УГЛОВОЙ ОРИЕНТАЦИИ ТЕЛЕЖКИ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2303240C1 |
| В. П. Лыткини В. С. Соболевский | 0 |
|
SU177856A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА (ВАРИАНТЫ) | 2000 |
|
RU2171476C1 |
| WO 2017149526 A2, 08.09.2017. | |||

