Родственные заявки
Настоящая заявка относится к предварительной заявке на патент США за номером 61/688,071 от 7 мая, 2012 года.
Предпосылки создания изобретения
В космическом пространстве много космического мусора, о чем предупреждает Комитет по космическому мусору, Национальный научно-исследовательский совет: «Орбитальный космический мусор. Техническая оценка», издательство National Academy Press ISBM- 10:0-309-05125-8; Вашингтон, 1995. Этот космический мусор вокруг Земли состоит из спутников, а также частей спутников и средств выведения на орбиту из тех, что были выведены на орбиту, особенно за последние четыре десятилетия. Некоторые из этих объектов были выведены из строя намеренно, другие взорвались или были взорваны, после чего возникли мелкие обломки. Об этом пишет П. Хаттис (P. Hattis) в «The Growing Menace of Orbital Debris», («Растущая опасность орбитального космического мусора»), лаборатория Дрейпера, центр Livebetter Center for a Better Life, 2011. Такие обломки, созданные на орбитах выше земной атмосферы, останутся там уже навсегда. Проблема космического мусора, влияющего на работу действующих спутников - общепризнанная проблема, и многие развитые страны уже направляют усилия на то, чтобы затормозить дальнейший рост космического мусора. Об этом говорится в монографии Д. Баиоччи и Уильяма Уэлсера IV (D. Baiocchi and William Welser IV) «Confronting Space Debris» («Как противостоять космическому мусору»); Rand Corporation; ISBM-978-0-8330-5056-4. В течение нескольких десятилетий идет речь о том, чтобы убрать космический мусор, но пока еще ничего не было сделано по причинам экономического, юридического и политического характера. Я писал об этом в своей статье «Rouge Commercial Geosynchronous Communications Satellites»; журнал «IEEE Transactions on Broadcasting»; BC-33, номер1; март 1987.
На создание, запуск и страхование спутников связи и вещательных спутников, как правило, требуется до 250 миллионов долларов. Их расчетный срок службы обычно составляет 15 - 18 лет. Убытки от столкновения с космическим мусором – это еще не вся проблема, существуют еще и миллионы клиентов, обслуживание которых проходит через этот спутник, а на замену спутника уходит, как правило, три года. В результате возникает серьезное невыполнение обязательств перед клиентами, и срываются текущие поступления.
Космический мусор представляет собой опасность для действующих спутников, и количество обломков космического мусора постоянно увеличивается, хотя и медленнее, чем в прошлом. Некоторые операторы спутников (включая пилотируемые международные орбитальные станции) принимают с наземных радиолокационных станций, в частности, с комплекса РЛС НОРАД, принадлежащего правительству США, информацию о местонахождении и движении космического мусора, а затем посылают команды по выведению действующих спутников на орбиты уклонения от космического мусора. Данные с наземных РЛС становятся менее эффективны по мере того, как расстояние до космического мусора возрастает.
Цели изобретения
Система и метод уклонения спутников от орбитального космического мусора в соответствии с настоящим изобретением позволяет действующему спутнику уклониться от орбитального космического мусора автономным или полуавтономным образом.
Преимущества рационализаторского предложения в соответствии с настоящим изобретением позволяют оператору спутника не запрашивать с наземных станций информацию об оценке орбитального космического мусора и требуемых контрмерах.
Отслеживание космического мусора с самого спутника эффективнее, так как наземным РЛС приходится иметь дело с затуханием сигнала, а также ошибками по причине прохождения через атмосферу и ионосферу.
Обычно спутники имеют почти полный обзор сфероида, так как обломки космического мусора могут прийти с любого направления, тогда как одна наземная РЛС, на практике, может наблюдать только менее половины сфероида.
Многочисленные наземные станции способны преодолеть недостаток обзора, о котором говорилось выше. Геостационарный спутник потребует три наземные станции, разнесенные, примерно, на 120 градусов долготы, а для спутников на более низких орбитах потребуется гораздо больше трех наземных станций. Такие наземные станции требуют больших вложений и имеют значительные эксплуатационные расходы, включая систему их внутренней связи.
Включение автономной системы уклонения от космического мусора в соответствии с настоящим изобретением на более крупных спутниках является особенно эффективным, так как обычно большая часть вычислительной мощности уже есть на спутнике, что позволяет добавить лишь немного оборудования и программного обеспечения, а сочетание существующих компьютерных подсистем в спутниках реализовано особенно эффективно.
В добавление к вышесказанному, оператор легко может добавить другие дополнительные возможности без добавления спутникового оборудования, реализуя лишь небольшое добавление программного обеспечения. Помимо определения орбиты уклонения, которая рассчитана на минимальный расход топлива, спутник также может определить, безопасна ли орбита уклонения в отношении возможного столкновения с другими обломками космического мусора. Кроме того, спутник также может определить воздействие выбранной спутниковой орбиты на эксплуатационные характеристики спутника.
Важным преимуществом автономного уклонения спутника является скорость операции, особенно в отношении случайных обломков космического мусора малого размера, которые могут быть невидимыми или трудно отслеживаемыми для наземных станций. Время, которое требуется наземной станции для сбора, обработки и передачи данных об уклонении на спутник, и необходимого подтверждения спутником их получения может быть слишком большим и не позволить спутнику выполнить операцию по уклонению.
Сущность изобретения
В одном из вариантов осуществления изобретения спутник конструируется с такой системой, которая включает подсистему по отслеживанию орбитального мусора, способную обнаруживать и отслеживать объекты, используя РЛС СВЧ-диапазона или световой (лазерный) локатор, или похожие датчики/детекторы. Оборудование для реализации обнаружения и слежения включает более высокочастотные РЛС СВЧ-диапазона и лазерный локаторы, которые, при определенных обстоятельствах, могут быть более предпочтительными, так как их разрешающая способность лучше подходит для космического мусора и его перемещений; необходимая антенна на спутнике будет меньше, не возникнет и проблем с атмосферным затуханием (так как и спутник, и космический мусор обычно находятся гораздо выше атмосферы). На спутнике есть бортовые вычислительные мощности для расчета данных, полученных с радиолокационных станций (РЛС) и лазерных локаторов, а также данных, полученных на собственной орбите спутника (извлеченных с бортовых датчиков, таких как астрономические датчики, датчики координат Солнца, датчики земной системы ориентации, приемники GPS-сигналов, и/или из сохраненных данных, отправленных с наземных станций управления через командные подсистемы спутника), с целью определения того, является ли столкновение возможным. В случае если столкновение возможно, компьютер рассчитывает минимальное изменение в спутниковой орбите, чтобы избежать такого столкновения, и вырабатывает команды для запуска бортовых орбитальных двигателей малой тяги, чтобы вывести спутник на орбиту уклонения. Самые большие современные ретрансляционные телевизионные спутники, помимо РЛС и лазерных локаторов, оснащены вышеназванными бортовыми датчиками и двигательной установкой.
Обнаруживать и отслеживать космический мусор, а также уклоняться от него, гораздо эффективнее со спутника, чем откуда-то еще, включая наземные станции. Орбиты следования обломков космического мусора случайны и многочисленны, и вероятность столкновения может возникнуть с любой стороны сфероида вокруг спутника. Маленькие, быстро движущиеся обломки космического мусора особенно трудно обнаружить с наземных станций, которые часто еще и ограничены в своих возможностях из-за непостоянного обзора и невозможности проникнуть через атмосферу на различных частотах, таких как оптическая частота. Так как, в большинстве случаев, уклонение от столкновения должно быть выполнено в течение очень короткого времени, автономная операция в спутнике пройдет быстрее, чем та же операция, управляемая с наземной станции (наземных станций) в результате отсутствия временных затрат на передачу команд между станцией и спутником, а также других ранее упомянутых факторов.
Нижеследующее описание автономных операций по уклонению от космического мусора исходит из использования компьютерных процессоров. Фактически, это компьютерные программы. Лучший способ их выполнения – на основе компьютерного/процессорного оборудования на конкретном спутнике. Так как многие из больших спутников уже оснащены мощными компьютерами с большим объемом памяти, многие или все компьютерные программы по уклонению от космического мусора можно интегрировать в эти компьютерные системы или в их небольшие расширения, выполненные для этой цели.
Потерять большой спутник в результате столкновения с космическим мусором было бы огромной практической и экономической катастрофой. В эксплуатации, большие коммерческие вещательные спутники, каждый из них, обслуживают миллионы клиентов. Возможностей для замены очень мало, и операторы обычно не имеют запасных вариантов, особенно если то, что случилось со спутником, не было запланировано. Заметьте, что производство и запуск нового спутника такого типа на замену старому занимает, по меньшей мере, 3 года, а часто даже больше. Стоимость такой замены составляет, по меньшей мере, четверть миллиарда долларов США.
Таким образом, описанная здесь спутниковая система уклоняется от столкновения с орбитальным космическим мусором и является решением вышеназванных проблем. Эта спутниковая система включает в себя орбитальное устройство слежения за космическим мусором, предназначенную для обеспечения потоков данных слежения по отдельным обломкам космического мусора, обнаруженным во всей зоне сфероида вокруг спутника, а также аппаратуру для обработки данных по определению орбиты, вычислению эфемерид, расчету столкновения, орбите уклонения спутника и командам для уклонения спутника.
Такая аппаратура может включать одно или несколько отдельных или интегрированных устройств или программ, предназначенных для выполнения одной или более функций, представленных в настоящем патенте. В частности, устройства, обрабатывающие данные для определения орбиты, получают данные слежения с орбитальной аппаратуры слежения в целях вычисления орбит космического мусора. Устройства расчета эфемерид получают орбитальные данные космического мусора от орбитальных устройств обработки данных, а данные об орбитальных элементах спутника - от бортовых датчиков и/или от спутникового компьютера.
Кроме того, устройства определения орбиты обеспечивают данные по орбитальным элементам космического мусора, включая большую полуось эллипса орбиты, эксцентриситет, угол наклона плоскости орбиты, прямое восхождение восходящего узла, аргумент перигея, период обращения, время прохождения перигея и изменения этих данных. Кроме того, устройства расчета эфемерид могут рассчитать эфемеридные данные, прогнозирующие будущую позицию космического мусора относительно будущих позиций спутника. Более того, устройства расчета столкновения получают эфемеридные данные по местонахождению обломка космического мусора и эфемеридные данные по местонахождению спутника с устройств расчета эфемерид.
Конструкции современных спутников включают высокоэффективный электрический двигатель малой тяги для выполнения операций по поддержанию стационарной орбиты. Так как такие системы способны осуществлять только небольшую корректировку орбиты, корректировка орбиты должна происходить с частыми интервалами, иногда дважды в день. Следовательно, когда рассматривается возможность будущих столкновений, и ввиду того, что небольшие корректировки осуществляются планомерно, устройства расчета эфемерид должны получить информацию о текущих и предстоящих операциях по поддержанию стационарной орбиты. Таким образом, уклонение от столкновения становится возможным в случае если внести поправку в виде добавления орбиты уклонения, убрать одну или более небольших плановых настроек по поддержанию стационарной орбиты, или комбинировать то и другое.
Устройства расчета столкновения также делают вывод о вероятности столкновения, показывающий, произойдет или не произойдет столкновение спутника с указанным обломком космического мусора в какое-то время в будущем. Кроме того, устройства расчета орбиты уклонения спутника от столкновения получают вывод от устройств расчета столкновения и рассчитывают минимальное изменение в существующей орбите спутника с переводом его на орбиту уклонения от столкновения с указанным обломком космического мусора. Далее устройства, генерирующие команды спутнику начать уклонение, принимают данные о минимальном изменении орбиты, рассчитывают необходимые команды для запуска спутниковых двигателей малой тяги, и доводят эти команды до выполнения.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройства слежения за орбитальным космическим мусором включают РЛС или лазерных локатор, или несколько РЛС и лазерных локаторов, настроенных так, что они обеспечивают обзор вокруг спутника с целью определения угла наклона, скорости и дальности одного или более обломков космического мусора.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением есть также телеметрическая система и командная система. Эти устройства могут посылать данные, полученные от устройств, предназначенных для определения орбиты, на наземную станцию управления, в которой есть хотя бы одно устройство по расчету эфемерид.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением система специально настроена на то, чтобы автономно избегать столкновения с элементами космического мусора на орбите.
В дополнительном или альтернативном варианте выполнения спутниковой системы в соответствии с настоящим изобретением устройство слежения за орбитальным космическим мусором выбирается из группы, включающей РЛС, лазерный локатор, РЛС СВЧ-диапазона и аппаратуру для распознавания оптическими средствами; данный вариант отличается тем, что устройства слежения за орбитальным космическим мусором включают один или более режимов, таких как импульсный режим, режим непрерывной работы и/или допплеровский режим; кроме того, данный вариант отличается тем, что устройства слежения за орбитальным космическим мусором включают один или более рабочих параметров, таких как длительность импульса, скан луча, сдвиг по частоте, мощность излучаемого сигнала на выходе и/или ширина зоны.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением первое устройство слежения предназначено для отслеживания космического мусора, имеющего диапазон высоких, относительно спутника, скоростей, а второе устройство слежения предназначено для космического мусора, имеющего диапазон низких, относительно спутника, скоростей.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением первое устройство слежения предназначено для отслеживания космического мусора, имеющего диапазон больших размеров, а второе устройство слежения предназначено для космического мусора, имеющего диапазон низких размеров.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройство расчета эфемерид получает часть данных об орбитальных элементах космического мусора от устройства определения орбиты, и часть данных об орбитальных элементах спутника - от бортовых датчиков и/или спутникового компьютера. Кроме того, устройство расчета эфемерид получает данные об орбитальных элементах космического мусора от одной или более наземных станций, и часть данных об орбитальных элементах спутника – также от одной или более наземных станций.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройство расчета столкновения может определять возможную зону столкновения для каждого обломка космического мусора на основе учета погрешностей измерений, связанных с одним или более факторами относительно обломка космического мусора. Такие факторы включают данные об орбите, размерах и/или скорости.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройство расчета столкновения делает вывод о том, произойдет ли столкновение между спутником в его будущей позиции и обломком космического мусора через какое-либо время после того, как вышеназванный спутник выполнит маневр по изменению орбиты.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройство расчета столкновения сохраняет матрицу выбора орбитального маневра для спутника, где каждый элемент матрицы включает оценку риска столкновения.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройство расчета столкновения должно определить, находится ли вероятность столкновения с орбитальным космическим мусором ниже заранее определенного порога, и обеспечить вывод, включающий следующие варианты: проигнорировать столкновение, и обеспечить выход оценки вероятности в другие подсистемы, отвечающие за уклонение от орбитального мусора.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением орбитальное устройство слежения за космическим мусором посылает информацию о космическом мусоре на землю, там эта информация используется для вывода прогноза по столкновениям для других спутников. Информация о космическом мусоре может быть представлена в виде результатов обработки данных по определению орбиты космического мусора, либо необработанных данных с РЛС и/или лазерных локаторов.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройство расчета орбиты уклонения спутника, далее, выводит набор решений о выборе орбитального маневра из матрицы в зависимости от одного или более заранее определенных рабочих параметров спутника, которые в полной мере являются функциональными при каждом выборе орбитального маневра.
В другом варианте осуществления спутниковой системы в соответствии с настоящим изобретением устройство расчета орбиты уклонения спутника далее выводит набор решений о выборе орбитального маневра из матрицы в зависимости от расчета минимального расхода топлива, требующегося на выполнение решения о выходе на новую орбиту уклонения.
В дальнейшем варианте осуществления спутниковой системы в соответствии с настоящим изобретением одно или несколько устройств системы учитывают время слежения за космическим мусором при выполнении более точных расчетов - или других функций того устройства, расчеты которого относятся к одному или более обломкам космического мусора, - и далее назначает приоритет расчетам на основе позиции и скорости космического мусора.
Краткое описание чертежей
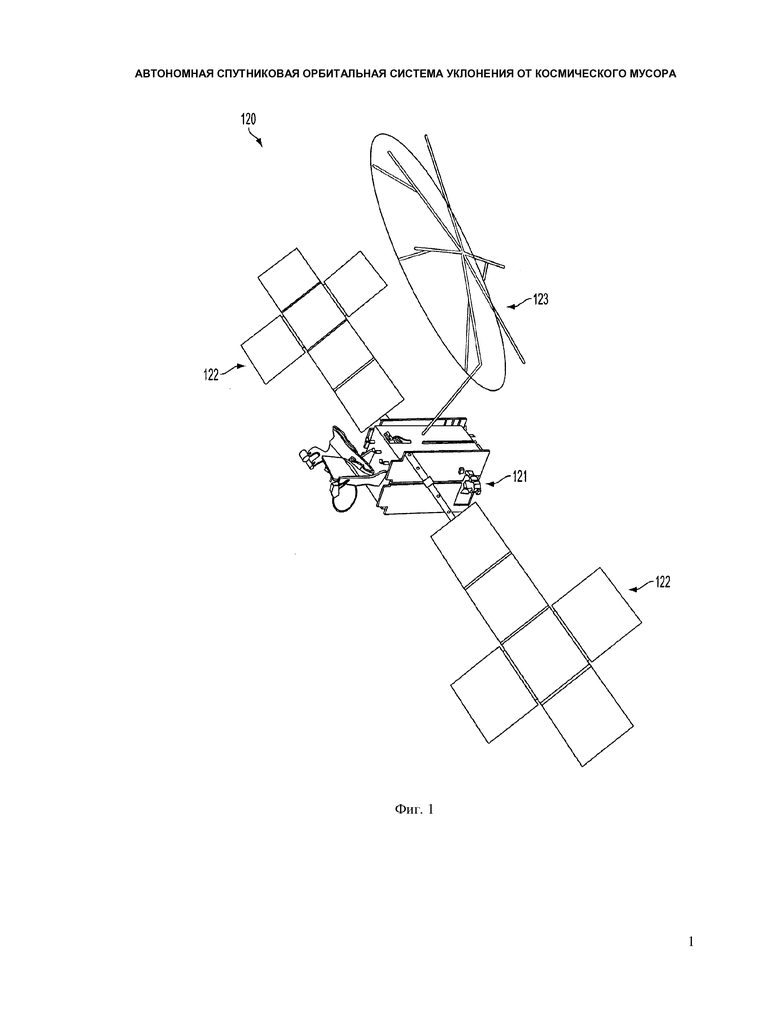
На фиг. 1 показан мощный современный спутник, используемый для целей вещания, включающий систему активного уклонения от столкновения с космическим мусором.
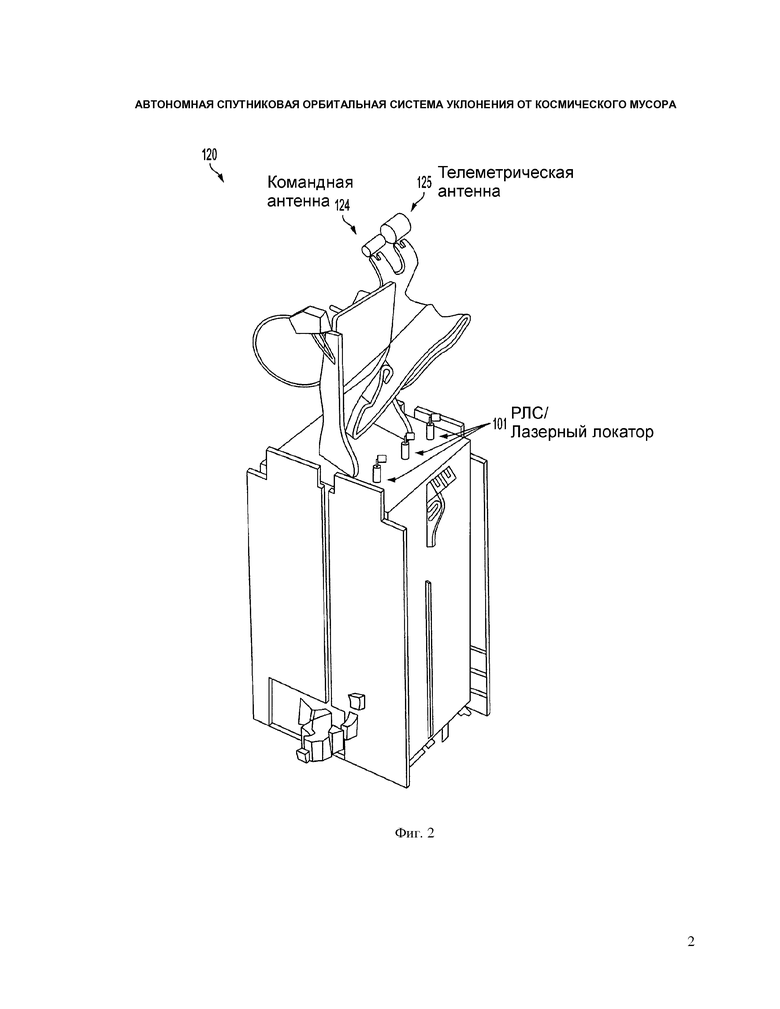
На фиг. 2 показано расширение основного корпуса спутника. На нем представлены командные и телеметрические антенны, используемые для связи с наземными станцией (станциями) управления, а также одно возможное расположение радиолокационных станций или лазерных локаторов для слежения за космическим мусором.
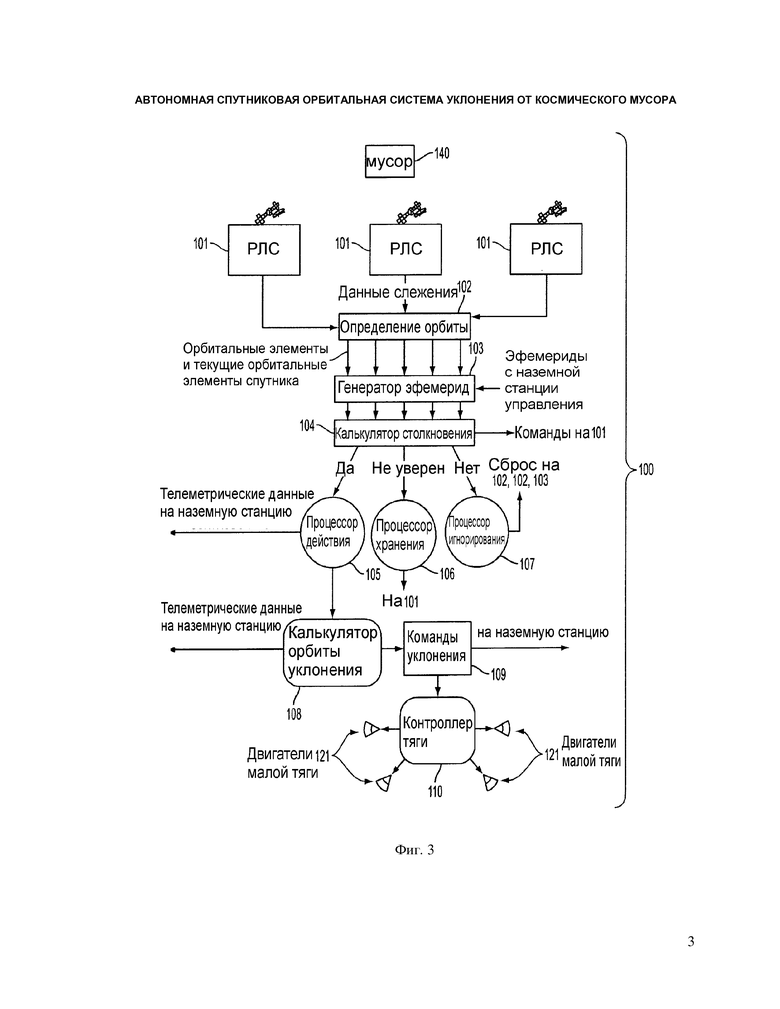
На фиг. 3 представлены плоская схема, изображающая вариант осуществления орбитальной системы уклонения от космического мусора в соответствии с настоящим изобретением, выполненную для спутника, и ее связь с наземной станцией управления, осуществляемую в целях поддержки и других целях.
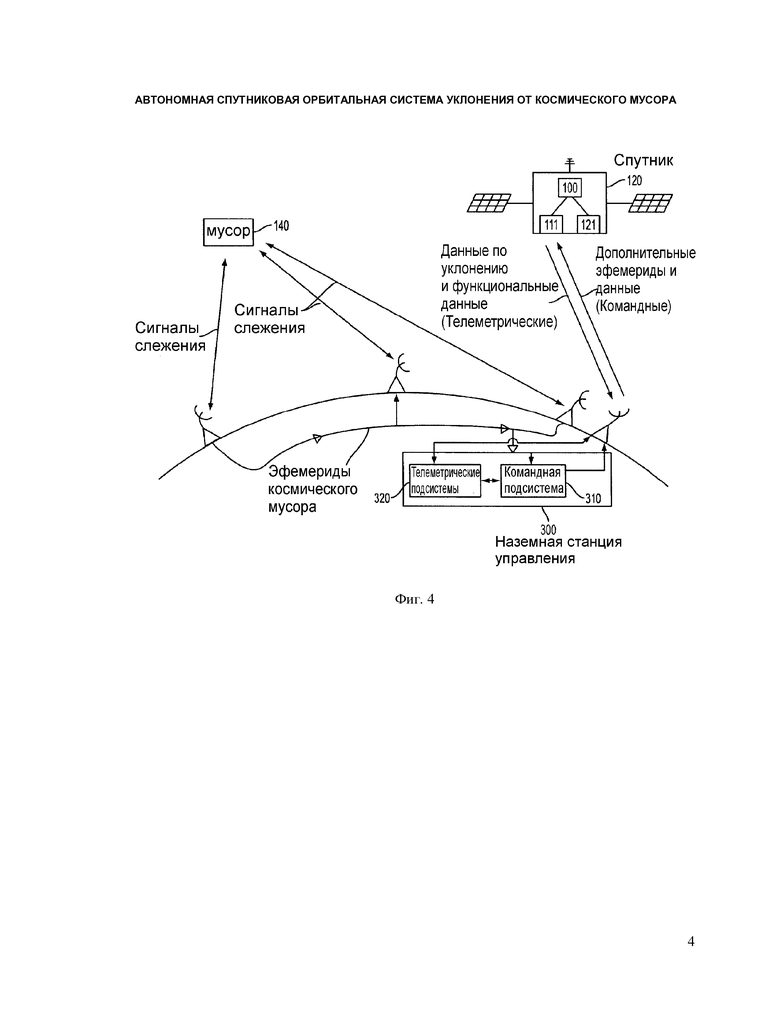
На фиг. 4 показан альтернативный вариант осуществления спутниковой системы в соответствии с настоящим изобретением. Наземная станция (или станции) управления может посылать дополнительные данные относительно местоположения и скорости, и/или эфемеридные данные по орбите космического мусора на спутниковую систему для того, чтобы дополнить автономно собранные данные спутника, или для того, чтобы, в случае неисправности спутниковой подсистемы, занимающейся сбором данных об орбитах космического мусора, позволить спутниковой системе уклонения продолжить работу, используя данные по местоположению/скорости космического мусора, собранные наземной станцией (станциями).
Подробное описание
Современный мощный спутник 120, используемый для целей вещания, показан на фиг. 1; данный спутник можно адаптировать для использования в соответствии с настоящим изобретением. Такие спутники обычно включают функциональное оборудование, в которое входят один или два спутниковых двигателя 121 малой тяги, один или более источников питания 122, а также одна или более антенн 123. Следует принять во внимание, что спутник 120 может иметь целый ряд систем, включая системы, связанные с основной функцией спутника, такие как системы связи, вещания, наблюдения и другие системы, не представленные на чертеже. Некоторые из таких систем и часть функционального оборудования может осуществлять взаимодействие с орбитальной системой уклонения от космического мусора в соответствии с настоящим изобретением, или быть ее частью.
Расширение основного корпуса спутника представлено на фиг. 2, на нем показана командная антенна 124 и телеметрическая антенна 125, используемые для связи с наземной станцией (станциями) управления, а также одно возможное местоположение трех орбитальных устройств 101 слежения - это РЛС или лазерные локаторы, или другие подобные датчики/детекторы, предназначенные для слежения за космическим мусором. Местоположение и количество антенн и орбитальных устройств слежения будет разным на разных спутниках. Расположение орбитальных устройств слежения, предпочтительно, выбирается таким образом, чтобы ничего не мешало иметь наилучший обзор всей сферы вокруг спутника. По меньшей мере, требуется два таких устройства, чтобы иметь полный обзор этой сферы и обеспечить резервирование на случай неисправности. На чертеже не показаны спутниковые датчики (например, астрономические датчики и датчики системы солнечной ориентации и земной ориентации), используемые внутри спутника для определения его местоположения и ориентации, а также несколько двигателей малой тяги, которые используются для управления орбитой и ориентацией, так как данное оборудование спутника относится к стандартному оборудованию. Кроме того, внутри спутника располагаются и процессоры/компьютеры, описанные ниже, а также топливные емкости, которые используются вышеназванными двигателями малой тяги для управления орбитой и ориентацией спутника.
Блок-схема на фиг. 3 представляет типичную работу орбитальной системы 100 по уклонению от космического мусора и ее возможную связь с наземной станцией управления, осуществляемую в целях поддержки, а также других целях. Можно принять во внимание, что орбитальная система 100 по уклонению от космического мусора необязательно задействует стандартное оборудование, которое может находиться на спутнике, например, антенны, датчики и/или устройства связи и процессорные устройства. Нижеследующее описание дано с учетом данного соображения. Также, процессоры и устройства, описанные здесь в качестве устройств, обладающих представленной функциональностью, могут быть одним или несколькими компьютерами общего применения, либо одной или несколькими прикладными интегральными схемами.
На спутниках часто устанавливаются процессоры, так как они обычно предназначены для конкретной цели. Но несколько процессоров могут входить в одно вычислительное устройство. Следует принять во внимание, что спутниковая орбитальная система 100 по уклонению от космического мусора может входить в одну или более вычислительных машин с запоминаемой [хранимой] программой, и/или прикладных интегральных схем, которые могут являться частью процессора и выполнять функции системы 100 в соответствии с настоящим изобретением, согласно описанному здесь варианту. Так, система 100 в соответствии с настоящим изобретением может быть настроена или сконструирована таким образом, что она будет взаимодействовать с такими устройствами, и при этом не выходить за пределы объема изобретения.
Система и метод спутниковой орбитальной системы 100 по уклонению от космического мусора в соответствии с настоящим изобретением позволяет действующему спутнику уклоняться от орбитального космического мусора 140 и подобных ему объектов (например, метеоритов) автономным или полуавтономным образом. В одном варианте осуществления, система 100 на фиг. 2 может быть сконструирована для спутника, имеющего, по меньшей мере, одно орбитальное устройство 101 слежения за космическим мусором, предназначенное для обнаружения и отслеживания объектов и обеспечения данными по слежению. Орбитальное устройство 101 слежения за космическим мусором включает процессор и один или несколько детекторов/датчиков, таких как РЛС СВЧ-диапазона или оптические (лазерные) локаторы.
Детекторы/датчики устройства 101 могут включать более высокочастотные РЛС СВЧ-диапазона или лазерные локаторы, которые могут быть более предпочтительными в определенных обстоятельствах, так как их разрешающая способность больше подходит для размеров и движения обломков космического мусора, необходимая антенная на спутнике будет меньших размеров, а атмосферное затухание не будет проблемой (так как спутники и обломки космического мусора, как правило, находятся выше атмосферы). Кроме этого, или в качестве альтернативы сказанному выше, детекторы/датчики 101 могут также включать РЛС и оптические локаторы с возможностью распознавания, а также другие датчики дистанционного сбора данных. Специалистам среднего уровня, в результате настоящего раскрытия изобретения, следует принять во внимание, что изменения в орбитальное устройство 101, предназначенное для слежения за космическим мусором, можно вносить, имея один или несколько типов датчиков 101 для разных вариантов осуществления системы 100 в соответствии с настоящим изобретением.
На фиг. 3 представлен вариант осуществления орбитальной системы 100 по уклонению от космического мусора, в соответствии с настоящим изобретением, которая может включать одно или более орбитальных устройств 101 слежения, или может взаимодействовать с существующими орбитальными устройствами слежения за космическим мусором на спутнике 120. В одном варианте осуществления орбитальными устройствами, предназначенными для слежения за космическим мусором, являются РЛС/лазерные локаторы 101, которые обнаруживают и отслеживают орбитальный космический мусор. Такие устройства, объединенными возможностями, должны обеспечивать полный обзор зоны сфероида вокруг спутника, так как космический мусор может появиться с любой стороны. Обычно, такие устройства собирают данные, включающие угол наклона и дальность обломка космического мусора от спутника, используя импульсную модуляцию, но могут также использоваться и РЛС непрерывного действия, обеспечивающие данные о почти мгновенной скорости спутника и космического мусора. Существуют также РЛС/локаторы, способные изменять модуляцию с импульсной на непрерывную. Существует множество режимов работы РЛС/локаторов, включая только рабочий режим, и режим с выстоем, при котором сканирование РЛС/локатора зоны сфероида прекращается, и устройство слежения непрерывно указывает на конкретный обломок космического мусора в течение заранее определенного периода времени, так чтобы обеспечить более точные и быстрые данные конкретно по данному обломку космического мусора. Рабочие режимы и модуляции РЛС/локатора можно также оптимизировать на отслеживание и размеров космического мусора, и его скорости относительно спутника. Данные по слежению подаются на процессор 102, определяющий орбиту, как потоки данных по слежению в отношении разных отдельных обломков космического мусора. Количество таких потоков может быть неограниченным, но обычно только несколько потоков требуется принять одновременно, так как большая часть обломков космического мусора не будут попадать на траекторию столкновения.
Орбитальное устройство 101 слежения может принимать команды от орбитального калькулятора 104, рассчитывающего возможность столкновения, по изменению функционального режима устройства 101 в соответствии с обстоятельствами. Например, вариант осуществления системы в соответствии с настоящим изобретением может обеспечивать изменение режимов работы с импульсного на непрерывный и, наоборот, при отслеживании одного или более обломков первого набора космического мусора, например, выбирая более близкие обломки, или те, которые имеют большую вероятность столкновения со спутником. В таком случае, соответственно, будет выбран непрерывный режим работы, тогда как импульсный режим, расходующий меньше энергии и требующий меньшей обработки, может применяться в отношении второго набора космического мусора, который находится дальше от спутника или имеет меньшую вероятность столкновения с ним. В другом варианте, один или более отдельных режимов могут быть назначены каждому устройству 101 слежения, когда применяется много устройств 101. Следует принять во внимание тот факт, что одна или более функций орбитального процессора слежения могут быть включены в другие программы или процессоры системы, такие как процессор 102, предназначенный для определения орбиты.
Процессор 102, предназначенный для определения орбиты, занимается определением орбиты обломков космического мусора. Вычислительное устройство 102 принимает данные о каждом обломке обнаруженного космического мусора, и когда собрано достаточно данных, рассчитывает орбиту этого обломка. Это не трудно, так как космический мусор следует классической орбите, первоначально сформулированной Кеплером, как описано Р. Бейтом (R. Bate), Д. Мюеллером (D. Mueller) и Дж Уайтом (J. White) в «Основах астродинамики» (Fundamentals of Astrodynamics; Dover Publications; New York; 1971). Сейчас существуют и другие подобные формулы определения орбиты, некоторые из которых требуют меньшей вычислительной мощности. Вычислительное устройство 102 можно сконструировать или запрограммировать на определение того, что получило название «орбитальных элементов» каждого обломка космического мусора, таких как большая полуось эллипса орбиты, эксцентриситет, угол наклона, период, время перигея, прямое восхождение восходящего узла, а также их варианты (т.е. неопределенность в элементах). Когда элементы по каждому обломку обнаруженного космического мусора определены в пределах обозначенной вариативности, элементы космического мусора отсылаются на процессор 103, который является генератором эфемерид.
Процессор расчета эфемерид 103 получает данные об орбитальных элементах и определяет местонахождение объектов космического мусора в будущем. Процессор выдает сообщение под названием «эфемерида», это стандартный вид орбитальных расчетов, отображающих позицию орбитального объекта в будущем, точность которых уменьшается с увеличением времени между расчетом и позиционированием объекта, а также при возрастании неопределенности в орбитальных элементах, о которой говорилось выше.
На процессор 103, рассчитывающий эфемериды, поступают орбитальные элементы самого спутника с процессора 102, которые были определены вышеназванными бортовыми датчиками или переданы с наземной станции во время последней передачи данных. В альтернативном варианте осуществления, наземная станция управления может отправлять такую информацию на процессор 103, рассчитывающий эфемериды, через командную подсистему линии связи. В другом варианте осуществления настоящего изобретения, ожидаемые небольшие настройки, корректирующие орбиту спутника, также могут быть отправлены на процессор 103, рассчитывающий эфемериды, что позволяет сделать более точный прогноз. Причинами для существования таких небольших орбитальных поправок могут быть определение местонахождения орбиты, техническое обслуживание, переход с одной орбиты на другую, операции по уводу с орбиты, а также другие учитываемые в рабочей характеристике системы факторы. Процессор 103 по эфемеридам принимает данные по орбитальным элементам спутника, а также, при необходимости, данные по небольшим орбитальным поправкам, и преобразует их в эфемериды для спутника. Эти данные по эфемеридам, генерированные процессором 103, посылаются на калькулятор 104 столкновения.
Калькулятор 104 столкновения – это вычислительное устройство, которое, главным образом, функционирует как сравнивающее устройство или калькулятор возможности столкновения. Данное устройство берет эфемериды каждого обломка космического мусора и сравнивает их будущую позицию с эфемеридами будущей позиции спутника. Оно выдает, по меньшей мере, три результата для каждого обломка космического мусора. Процессор 105 действия получает и сохраняет, по меньшей мере, один результат, полученный от калькулятора 104 столкновения, который определяет, что столкновение вероятно в какой-то момент в будущем в заранее определенном пороге. Процессор 105 действия посылает, по меньшей мере, один результат на калькулятор 108 орбиты уклонения и может также послать результат на наземную станцию управления посредством телеметрической подсистемы.
Процессор 107 игнорирования получает и сохраняет, по меньшей мере, один результат, полученный от калькулятора столкновения, где калькулятор 104 определяет, что столкновение не является вероятным или не ожидается. В этом случае, процессор 107 игнорирования дает команду устройству 101 слежения, процессору 102 по определению орбит, и процессору 103 по эфемеридам проигнорировать данный конкретный обломок космического мусора. Эти проигнорированные данные по космическому мусору сохраняются в памяти процессора 101, так что дальнейшее слежение за данным объектом не выполняется. Процессор 106 хранения получает и сохраняет, по меньшей мере, один результат из тех, что получены от калькулятора столкновения, в которых калькулятор 104 определяет, что изменения достаточно большие, чтобы сделать будущее столкновение неопределенным внутри заранее определенного порога. В этом случае, процессор 106 хранения может просто ждать, пока не будет собрано больше данных по этому обломку космического мусора, или может направить РЛС/радары 101 собрать больше данных, скажем, посредством перехода в режим с выстоем, или смены типа модуляции.
Процессор 108, рассчитывающий орбиту уклонения, главным образом, рассчитывает минимальное изменение в существующей орбите спутника, чтобы уклониться от столкновения с космическим мусором. Это стандартный расчет. Расчет полезным образом выполняется таким образом, что на изменение орбиты расходуется минимальное количество имеющегося на борту топлива. Если расчетное время столкновения раньше или позже небольшого планового орбитального маневра, то процессор 108 по орбите уклонения может принять решение не выполнять этот плановый орбитальный маневр, чтобы уклониться от столкновения, или скомбинировать плановый маневр и маневр уклонения. Такая стратегия может привести к тому, что потребуется очень малое или даже нулевое количество, дополнительного топлива.
Эти данные по изменению орбиты посылаются на процессор 109 команды уклонения, который занимается расчетом команд для выполнения необходимых маневров спутника (обычно, какие двигателя использовать, желательная ориентация спутника, время и продолжительность запусков двигателей). Спутниковые команды посылаются на спутниковый контроллер 110 тяги, который обычно включается в спутник. На спутнике может быть, по меньшей мере, два вида бортовых спутниковых двигателей 121. Один вид запускается химическими веществами и может обеспечить большое тяговое усилие. Другой – электрический, который обеспечивает малую тягу. Электрический более эффективен и обычно используется для удержания спутника в назначенной точке стояния на геостационарной орбите, коррекция «запад – восток», где желательна малая тяга. Для маневра уклонения, выбор типа двигателя (если более двух типов используется на спутнике) будет определяться количеством требуемого изменения орбиты и периодом времени, имеющегося для его выполнения. Как показано, эти команды могут также посылаться с процессора 109 по команде уклонения на наземную станцию управления посредством телеметрической подсистемы, так чтобы оператор спутника знал, что происходит. Команды уклонения могут также включать инструкции, необходимые для того, чтобы завершить или отменить ожидаемые номинальные спутниковые орбитальные поправки, которые уже могут выполняться или быть запланированными в памяти спутника.
Также возможно реализовать настоящее изобретение в одной или более полуавтоматических конфигураций или комбинаций. На фиг. 4 показано один такой альтернативный вариант осуществления спутниковой системы в соответствии с настоящим изобретением.
Дополнительные данные по орбитам и космическому мусору можно получить из наземных или космических источников, отличных от устройств слежения на подлежащем спутнике. Эти данные могут быть отправлены на спутник через его наземную станцию управления 300, используя его командную подсистему 310 для пополнения данных по слежению, генерированных спутником. Так, если спутниковая орбитальная подсистема отслеживания космического мусора. Также, если спутниковая орбитальная подсистема слежения за космическим мусором неисправна, а остальные подсистемы уклонения исправны, то данные по местонахождению/скоростям орбитального космического мусора, принятые с земли, могут использоваться, чтобы продолжать спутниковые операции по уклонению.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЫПОЛНЕНИЯ МАНЕВРА УКЛОНЕНИЯ КОСМИЧЕСКОГО АППАРАТА ОТ СТОЛКНОВЕНИЯ НА ОРБИТЕ С ДРУГИМИ ТЕЛАМИ | 2015 |
|
RU2586920C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| КОСМИЧЕСКИЙ АППАРАТ ДЛЯ УБОРКИ КОСМИЧЕСКОГО МУСОРА | 2019 |
|
RU2703056C1 |
| Устройство уборки космического мусора | 2021 |
|
RU2769579C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ИЛИ ВОЗВРАТА ИСКУССТВЕННЫХ СПУТНИКОВ | 2012 |
|
RU2600971C2 |
| Способ регистрации приближения активного объекта к космическому аппарату орбитального резерва в области низких околоземных орбит | 2017 |
|
RU2658203C1 |
| СПОСОБ УДАЛЕНИЯ С ГЕОСТАЦИОНАРНОЙ ОРБИТЫ НЕФУНКЦИОНИРУЮЩЕГО КОСМИЧЕСКОГО АППАРАТА | 2014 |
|
RU2559392C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ВЫВЕДЕНИЯ НЕСКОЛЬКИХ СПУТНИКОВ НА НЕ ЯВЛЯЮЩИЕСЯ КОМПЛАНАРНЫМИ ОРБИТЫ С ИСПОЛЬЗОВАНИЕМ СИЛЬНО ЭКСЦЕНТРИЧЕСКИХ ОРБИТ И АТМОСФЕРНОГО ТОРМОЖЕНИЯ | 1997 |
|
RU2220886C2 |
| Способ обнаружения объектов космического мусора и наведения на них космического аппарата с использованием лазерного сканирования пространства | 2023 |
|
RU2813696C1 |
| Способ обнаружения и контроля космического мусора вблизи геостационарной орбиты | 2018 |
|
RU2684253C1 |
Группа изобретений относится к управлению движением искусственных спутников с целью предотвращения их столкновений с фрагментами космического мусора. Бортовая система спутника определяет радиолокационными средствами вероятность таких столкновений со всех направлений внутри сфероида вокруг спутника. При достаточно высокой вероятности система рассчитывает на основе генерируемых ею эфемеридных данных для спутника и фрагментов мусора траекторию уклонения. Последняя реализуется двигателями малой тяги, при выполнении требования минимального изменения орбиты спутника. Техническим результатом группы изобретений является повышение надежности и упрощение процедуры уклонения спутника от столкновений с космическим мусором в автономном или полуавтономном режиме. 2 н. и 30 з.п. ф-лы, 4 ил.
1. Спутниковая система, которая может автономно уклоняться от столкновения с орбитальным космическим мусором, включающая:
орбитальное устройство слежения за космическим мусором, обеспечивающее данные по слежению за обломком космического мусора;
процессор для определения орбиты, получающий вышеназванные данные по слежению от вышеназванного устройства слежения за космическим мусором и рассчитывающий орбиты космического мусора, а также обеспечивающий данные по орбитальным элементам космического мусора и рассчитывающий орбитальные элементы спутника, используя либо данные с бортовых датчиков, либо данные из памяти спутникового компьютера, либо те и другие;
процессор расчета эфемерид, получающий вышеназванные данные по орбитальным элементам космического мусора от орбитального компьютерного процессора и данные по орбитальным элементам спутника и генерирующий эфемеридные данные для будущих позиций космического мусора и будущих позиций спутника;
калькулятор столкновения, получающий эфемеридные данные по будущим позициям космического мусора и эфемеридные данные по будущим позициям спутника от вышеназванного процессора расчета эфемерид, причем вышеназванный калькулятор столкновения сравнивает вышеназванные данные по будущим эфемеридам космического мусора и спутника и делает вывод, который показывает вероятность столкновения между вышеназванным космическим мусором и вышеназванным спутником в определенное время в будущем;
процессор расчета орбиты уклонения, получающий вывод о том, что имеется вероятность столкновения, и рассчитывающий орбиту уклонения, и
процессоры для выработки и выполнения команд двигателями по реализации орбиты уклонения.
2. Спутниковая система по п.1, отличающаяся тем, что орбитальное устройство слежения выбирается из группы, включающей РЛС, лазерный локатор, РЛС СВЧ-диапазона, оптического или микроволнового распознавания, а также тем, что включает процессор команд уклонения, который получает данные по орбите уклонения от процессора, рассчитывающего орбиты уклонения, рассчитывает необходимые команды для запуска двигателей малой тяги спутника и выдает эти команды к исполнению, причем вышеназванное орбитальное устройство слежения обеспечивает полный обзор сфероида вокруг спутника для определения угла наклона, скорости и дальности космического мусора от спутника.
3. Спутниковая система по п.2, отличающаяся тем, что для слежения за космическим мусором, имеющим диапазон высоких скоростей относительно спутника, включает первое орбитальное устройство слежения, а для слежения за космическим мусором, имеющим диапазон низких скоростей, включает второе устройство слежения.
4. Спутниковая система по п.2, отличающаяся тем, что для слежения за космическим мусором, имеющим диапазон больших размеров, включает первое орбитальное устройство слежения, а для слежения за космическим мусором, имеющим диапазон малых размеров, включает второе устройство слежения.
5. Спутниковая система по п.1, отличающаяся тем, что процессор расчета эфемерид получает часть данных по орбитальным элементам космического мусора от процессора определения орбит и часть данных по орбитальным элементам спутника от бортовых датчиков и данных в памяти бортового компьютера; и далее отличающаяся тем, что процессор расчета эфемерид получает часть данных по орбитальным элементам космического мусора от одной или более наземных станций и часть данных по орбитальным элементам спутника – от одной или более наземных станций.
6. Спутниковая система по п.1, отличающаяся тем, что калькулятор столкновения определяет вероятность столкновения для каждого обломка космического мусора на основе неопределенности в измерениях, связанной с данными по орбите, размерам и/или скорости в отношении обломка космического мусора.
7. Спутниковая система по п.1, отличающаяся тем, что калькулятор столкновения далее делает вывод, показывающий вероятность столкновения космического мусора со спутником в какой-то определенный момент в будущем и возможную будущую позицию вышеназванного спутника после выполнения орбитального маневра уклонения.
8. Спутниковая система по п.1, отличающаяся тем, что калькулятор столкновения хранит матрицу выбора орбитальных маневров уклонения для спутника, причем каждый элемент матрицы включает оценку риска столкновения с космическим мусором и данные по количеству бортового топлива, необходимого для выполнения каждого выбранного маневра, а также эксплуатационную характеристику спутника после каждого возможного маневра уклонения.
9. Спутниковая система по п.1, отличающаяся тем, что калькулятор столкновения настроен на определение того, находится ли вероятность столкновения с орбитальным космическим мусором ниже заранее определенного порога, и на обеспечение, по меньшей мере, одного вывода, включая вывод об игнорировании опасности столкновения.
10. Спутниковая система по п.1, отличающаяся тем, что вышеназванный процессор расчета орбиты уклонения для спутника далее настроен на выбор набора решений о возможных орбитальных маневрах из матрицы в зависимости от того, один или два параметра эксплуатационной характеристики спутника являются полностью функциональными для каждого выбора орбитального маневра.
11. Спутниковая система по п.1, отличающаяся тем, что вышеназванный процессор расчета орбиты уклонения для спутника далее настроен на выбор набора решений о возможных орбитальных маневрах из матрицы в зависимости от расчета минимального количества топлива, требуемого для выполнения решения об уклонении посредством вывода на новую орбиту.
12. Спутниковая система по п.1, отличающаяся тем, что предусматривает время задержки в процессе слежения за космическим мусором, которое используется для расчетов, связанных с одним или более обломками космического мусора, а также устанавливает приоритет расчетов в зависимости от позиции и скорости обломков космического мусора.
13. Спутниковая система по п.9, отличающаяся тем, что устройство данной спутниковой системы, выбранное из группы, включающей: орбитальное устройство слежения за космическим мусором, процессор для определения орбит, калькулятор столкновения, процессор исполнительных действий, настраивается на игнорирование всех или части данных, связанных с игнорируемым объектом на основе вывода об игнорировании опасности столкновения.
14. Спутниковая система по п.1, отличающаяся тем, что процессор расчета эфемерид получает часть данных об орбитальных элементах космического мусора от процессора по определению орбиты и часть данных по орбитальным элементам спутника со спутникового компьютера, причем процессор расчета эфемерид получает часть данных об орбитальных элементах космического мусора с одной или более наземных станций, а часть данных об орбитальных элементах спутника - с одной или более наземных станций.
15. Спутниковая система, позволяющая спутнику уклоняться от столкновения с орбитальным космическим мусором, включающая:
устройство слежения за орбитальным космическим мусором, обеспечивающее потоки данных по слежению за отдельными обломками космического мусора, обнаруженными во всей сферической зоне вокруг спутника;
устройство для определения орбиты, получающее вышеназванные данные слежения от вышеназванного устройства слежения для того, чтобы рассчитывать орбиты космического мусора, причем это устройство для определения орбиты обеспечивает данные по параметрам орбиты элементов космического мусора, включая большую полуось орбиты, эксцентриситет, наклонение, долготу восходящего узла, аргумент перигея, период обращения, время прохождения перигея и изменения этих данных;
устройство расчета эфемерид, получающее орбитальные данные по космическому мусору с устройства для определения орбиты и данные по орбитальным элементам спутника с бортовых датчиков, или из памяти бортового компьютера, или из обоих источников и рассчитывающее эфемеридные данные по местоположению космического мусора в будущем относительно будущих позиций спутника;
устройство расчета столкновения, которое получает эфемеридные данные по местонахождению обломка космического мусора и эфемеридные данные по местонахождению спутника с устройства расчета эфемерид, причем данное устройство расчета столкновения предоставляет вывод о столкновении в виде информации о том, произойдет или не произойдет столкновение обломка космического мусора со спутником в будущем;
устройство расчета орбиты уклонения спутника, получающее вывод от вышеназванного устройства расчета столкновения и рассчитывающее минимальное изменение существующей орбиты спутника с переходом на орбиту, которая позволяет уклониться от столкновения с вышеназванным космическим мусором, и
устройство генерирования и выполнения команд для двигательной установки по достижению орбиты уклонения.
16. Спутниковая система по п. 15, отличающаяся тем, что вышеназванные средства слежения за орбитальным космическим мусором включают одно или более устройств из группы, включающей РЛС и лазерный локатор, и обеспечивают обзор вокруг спутника с тем, чтобы определить угол наклона, скорость и дальность космического мусора от спутника.
17. Спутниковая система по п. 15, дополнительно включающая средства телеметрической системы и средства командной системы, призванные посылать данные от устройства для определения орбиты на наземную станцию управления, на которой есть одно или более устройств для обработки данных по эфемеридам, и получать данные.
18. Спутниковая система по п. 15, дополнительно включающая устройство генерирования команд по уклонению спутника, получающее данные для минимального изменения орбиты так, чтобы рассчитать требуемые команды для запусков спутниковых двигателей малой тяги и довести эти команды до выполнения.
19. Спутниковая система по п. 15, отличающаяся тем, что устройство слежения за космическим мусором выбирается из группы, включающей: РЛС, лазерный локатор, РЛС СВЧ-диапазона и средства оптического распознавания, причем устройство слежения за космическим мусором включает один или два режима, которые выбираются из группы, включающей: импульсный режим, непрерывный режим и допплеровский режим, причем средства слежения за космическим мусором включают один или два рабочих параметра, выбранных из группы, включающей длительность импульса, сканирование луча, сдвиг частоты, выход мощности излучения и ширину частотной полосы.
20. Спутниковая система по п. 15, дополнительно включающая первое устройство слежения, предназначенное для слежения за космическим мусором с диапазоном высоких скоростей относительно спутника, и второе устройство слежения - для слежения за космическим мусором с диапазоном низких скоростей.
21. Спутниковая система по п. 15, дополнительно включающая первое устройство слежения, предназначенное для слежения за космическим мусором с диапазоном больших размеров, и второе устройство слежения - для слежения за космическим мусором с диапазоном малых размеров.
22. Спутниковая система по п. 15, отличающаяся тем, что устройство для расчета эфемерид получает часть орбитальных данных о космическом мусоре от устройства по определению орбиты и часть данных по орбитальным элементам спутника - с бортовых датчиков, или из памяти бортового компьютера, или из обоих источников, причем устройство расчета эфемерид получают часть данных об орбитальных элементах космического мусора с одной или более наземных станций, а часть данных об орбитальных элементах спутника - с одной или более наземных станций.
23. Спутниковая система по п. 15, отличающаяся тем, что устройство расчета столкновения определяет зону вероятного столкновения для каждого обломка космического мусора на основе значения неопределенности измерения, связанного с одним или двумя факторами в отношении обломка космического мусора, выбранными из группы, включающей данные по орбите, размерам и/или скорости.
24. Спутниковая система по п.15, отличающаяся тем, что устройство расчета столкновения делает вывод, показывающий вероятность столкновения космического мусора со спутником в какой-то определенный момент в будущем после выполнения орбитального маневра уклонения.
25. Спутниковая система по п.15, отличающаяся тем, что устройство расчета столкновения далее сохраняет матрицу выбора орбитальных маневров для спутника, и каждый элемент матрицы включает оценку риска столкновения и количество бортового топлива, необходимого для выполнения каждого маневра, а также эксплуатационную характеристику спутника после каждого из возможных маневров уклонения.
26. Спутниковая система по п.15, отличающаяся тем, что устройство расчета столкновения определяет, находится ли вероятность столкновения с орбитальным космическим мусором ниже заранее определенного порога, и представляет, по меньшей мере, один вывод, включая вывод об игнорировании опасности столкновения.
27. Спутниковая система по п.15, отличающаяся тем, что вышеназванное устройство расчета столкновения далее выбирает набор решений из матрицы о возможных орбитальных маневрах в зависимости от одного или более параметров эксплуатационной характеристики спутника, которые являются полностью функциональными для каждого выбора орбитального маневра.
28. Спутниковая система по п.15, отличающаяся тем, что устройство расчета орбиты уклонения спутника далее осуществляет выбор набора решений о возможных орбитальных маневрах из матрицы, исходя из расчета минимального количества топлива, требуемого для выполнения решения об уклонении посредством вывода на новую орбиту.
29. Спутниковая система по п.15, отличающаяся тем, что предусматривает время задержки в процессе слежения за космическим мусором, которое используется для выполнения более подробных расчетов, связанных с одним или более обломками космического мусора, и устанавливает приоритет расчетов уклонения в зависимости от позиции и скорости обломков космического мусора.
30. Спутниковая система по п. 26, отличающаяся тем, что устройство данной спутниковой системы, выбранное из группы, включающей: орбитальное устройство слежения за космическим мусором, устройство для определения орбиты, устройство для расчета столкновения и устройство исполнительных действий, настраивается на игнорирование всех или части данных, связанных с игнорируемым объектом на основе вывода об игнорировании опасности столкновения.
31. Спутниковая система по п.15, отличающаяся тем, что устройство расчета эфемерид далее получает данные об орбитальных элементах космического мусора с процессора по определению орбиты и данные по орбитальным элементам спутника - от бортовых датчиков и/или со спутникового компьютера.
32. Спутниковая система по п.15, отличающаяся тем, что устройство расчета эфемерид получает часть данных об орбитальных элементах космического мусора с устройства для определения орбиты, а часть данных об орбитальных элементах спутника – со спутникового компьютера, причем устройство расчета эфемерид получает часть данных об орбитальных элементах космического мусора с одной или более наземных станций, а часть данных по орбитальным элементам спутника - с одной или более наземных станций.
| СПОСОБ УВЕЛИЧЕНИЯ СРОКОВ АКТИВНОГО СУЩЕСТВОВАНИЯ КОСМИЧЕСКИХ АППАРАТОВ | 1996 |
|
RU2137682C1 |
| и др | |||
| Радиотехнические системы предупреждения столкновений самолетов | |||
| - М.: Советское радио, 1977, c.30;US 20080033648 A1, 07.02.2008;US 20040075605 A1, 22.04.2004;US 20110196550 A1, 11.08.2011;US 6142423 A, 07.11.2000;FR 2656587 A1, 05.07.1991. | |||

