УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Данное изобретение относится к передатчикам параметра процесса, применяемым для измерения температуры в системах мониторинга и управления процессом. Более конкретно, данное изобретение относится к мониторингу уровня шума в измерительной цепи в процессе оцифровки измерения параметра процесса.
Передатчики параметра процесса применяются для измерения параметра процесса в системе мониторинга и управления процессом. Передатчики на основе микропроцессора часто включают в себя датчик, аналого-цифровой преобразователь для преобразования выходного сигнала с датчика в цифровую форму, микропроцессор для корректировки оцифрованного выходного сигнала и выходную цепь для передачи скомпенсированного выходного сигнала. В настоящее время данная передача обычно осуществляется по контуру управления процессом, такому как 4-20 мА контур управления, или беспроводным способом.
Одним примерным параметром, который измеряется такой системой, является температура, которая определяется путем измерения сопротивления термопреобразователя сопротивления (RTD), который также иногда называют платиновым термометром сопротивления (PRT) или напряжения на термопаре. Конечно, эти типы датчиков температуры являются только примерными, и другие также могут быть применены. Аналогично, температура является только примерным параметром процесса, и множество других параметров управления процессом могут быть также измерены, такие как давление, скорость потока, уровень pH и т.д. Следовательно, при том что далее описание будет продолжено относительно датчика температуры, будет оценено, что описание может быть легко продолжено относительно других датчиков.
В традиционных цепях измерения есть ряд соединительных точек между датчиком температуры и передатчиком измерения, которые могут выйти из строя или ухудшиться. Во многих областях применения измерения температуры для пользователя очень важно понимать, когда измерение температуры ухудшено по любой причине перед применением измерения в стратегии управления. Ухудшенные условия могут возникать из-за ряда различных причин, включая отказ вывода/датчика, избыточное сопротивление линии, корродированные или нарушенные соединения и т.д.
Ряд диагностик был применен в передатчиках температуры для оценки статических состояний, таких как сопротивление вывода, избыточное напряжение постоянного тока (DC) или отказ датчика. Тем не менее, любое из этих статических состояний может стать переходным, динамическим или непостоянным состоянием, что происходит при обработке измерения. Это может привести к определенному числу источников погрешности измерения.
Например, в процессе оцифровки входное напряжение аналого-цифрового преобразователя (АЦП) измерения усредняется, и не предоставляется никакой информации о шуме в процессе оцифровки. Асимметричный шум может привести к погрешности измерения в выходном сигнале, предоставляемом системе управления.
Кроме того, шум в настоящее время может быть оценен путем сравнения отсчетов с предыдущими в передатчике со скоростью обновления сигналов передатчика, но в некоторых случаях это может быть слишком медленно. Шум измерения, который возникает с большей частотой, чем скорость обновления сигналов, может, таким образом, также вызвать погрешность.
Кроме того, избыточное сопротивление линии или емкость измерения (как на линии датчика, так и внутри передатчика) могут повлиять на время установления цепи измерения. Если время установления не достаточно большое, могут возникнуть погрешности, выходящие за рамки точности в спецификации передатчика. Тем не менее, непосредственное увеличение времени установления уменьшает скорость обновления сигнала измерения. Следовательно, может быть баланс между скоростью обновления сигнала измерения и погрешностями измерения, которые возникают в связи с тем, что время установления слишком мало.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Передатчик параметра процесса включает в себя аналого-цифровой преобразователь (АЦП), который принимает сигнал датчика, предоставляемый датчиком, который считывает параметр процесса, и преобразует сигнал датчика в цифровой сигнал. Процессор принимает цифровой сигнал и предоставляет выходной сигнал измерения, соответствующий цифровому сигналу. Детектор шума принимает сигнал датчика и генерирует первое значение, соответствующее числу случаев положительного шума относительно положительного граничного значения, и второе значение, соответствующее числу случаев отрицательного шума относительно отрицательного граничного значения. Процессор оценивает число шумов и генерирует выходной сигнал шума, соответствующий обнаруженному шуму, на основании первого и второго значений.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
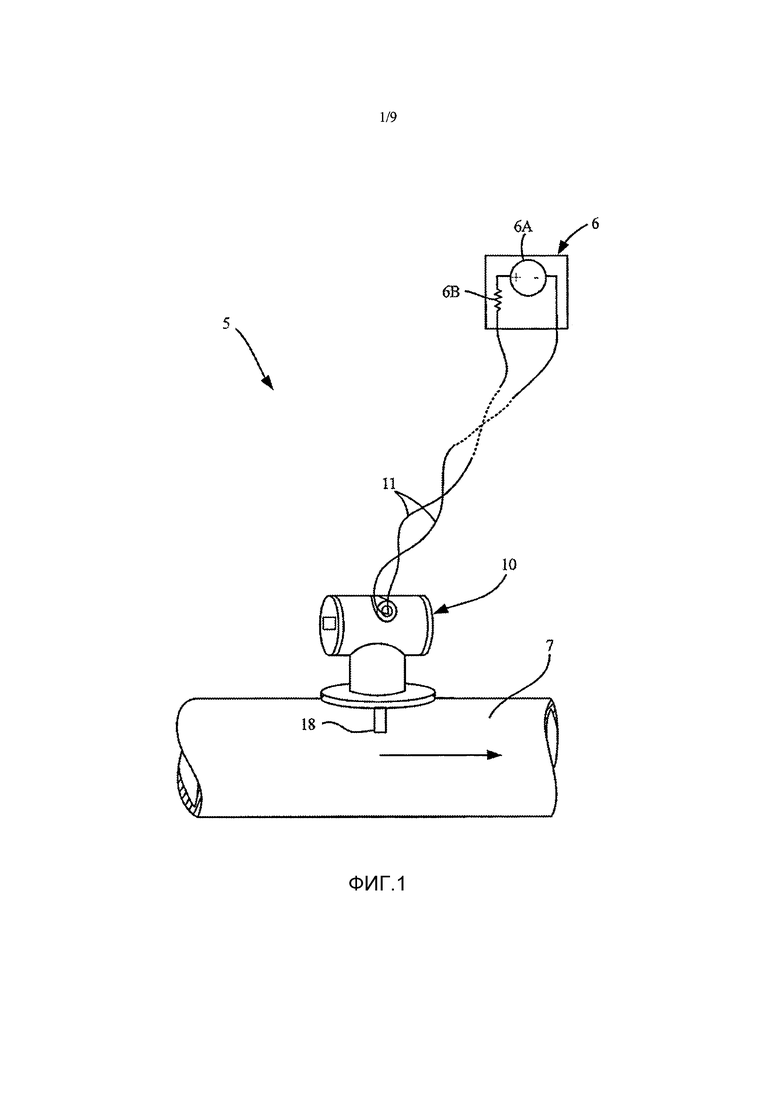
ФИГ. 1 является упрощенной схемой, изображающей промышленную систему управления процессом, включающую в себя датчик температуры, выполненный с возможностью считывать температуру технологической текучей среды.
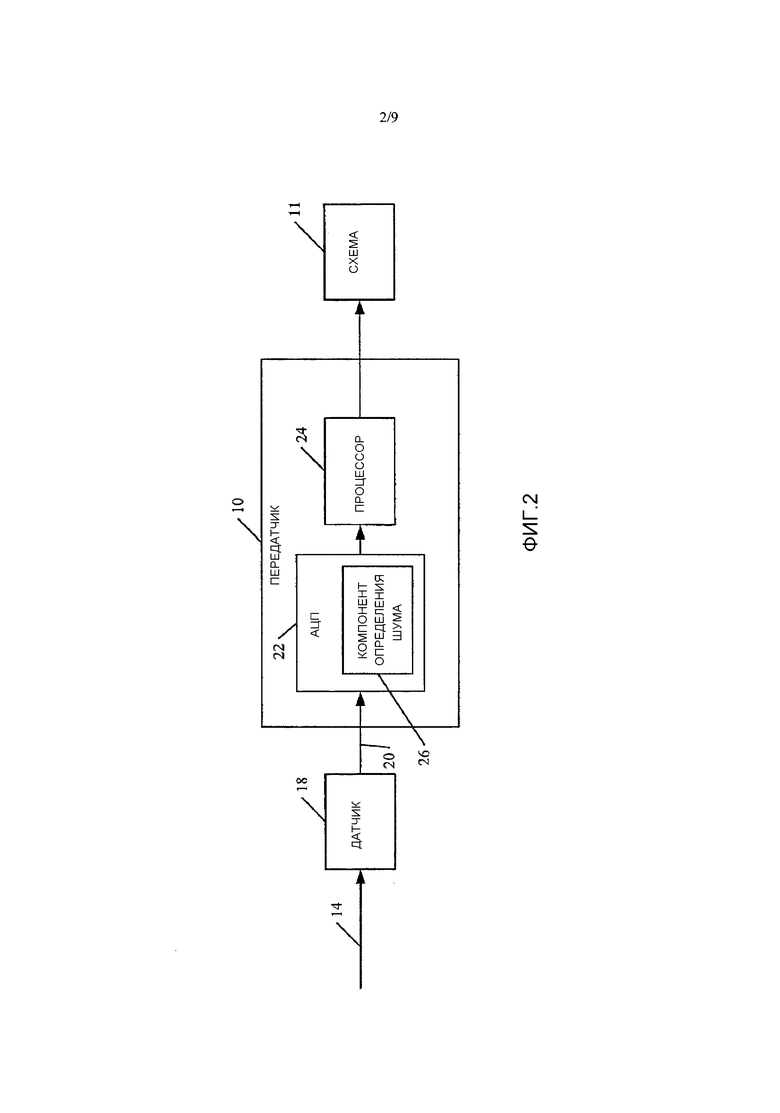
ФИГ. 2 является блок-схемой, изображающей передатчик с ФИГ. 1 более подробно.
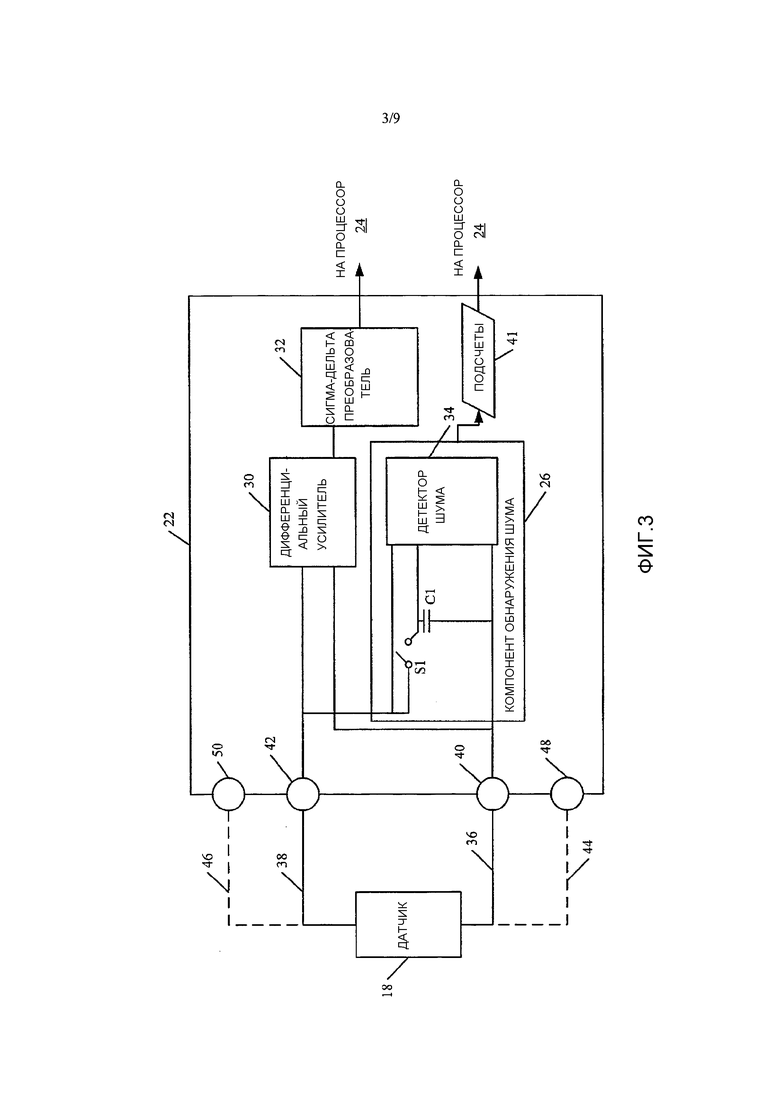
ФИГ. 3 является частично блок-схемой, частично схемой сети, изображающей аналого-цифровой преобразователь с датчиком шума.
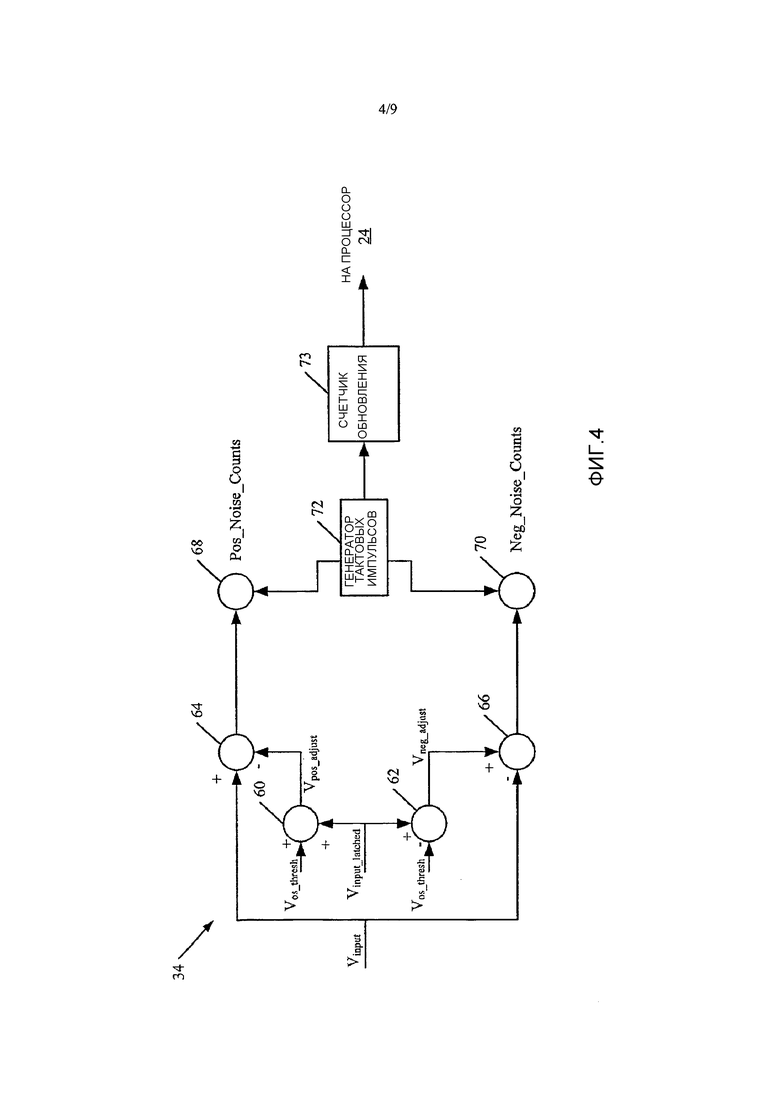
ФИГ. 4 является блок-схемой процесса, изображающей один вариант осуществления работы аналого-цифрового преобразователя, изображенного на ФИГ. 3.
ФИГ. 5 является схемой сумматора подсчетов шумов в компоненте определения шума.
ФИГ. 6-8 изображает графики подсчетов относительно напряжения.
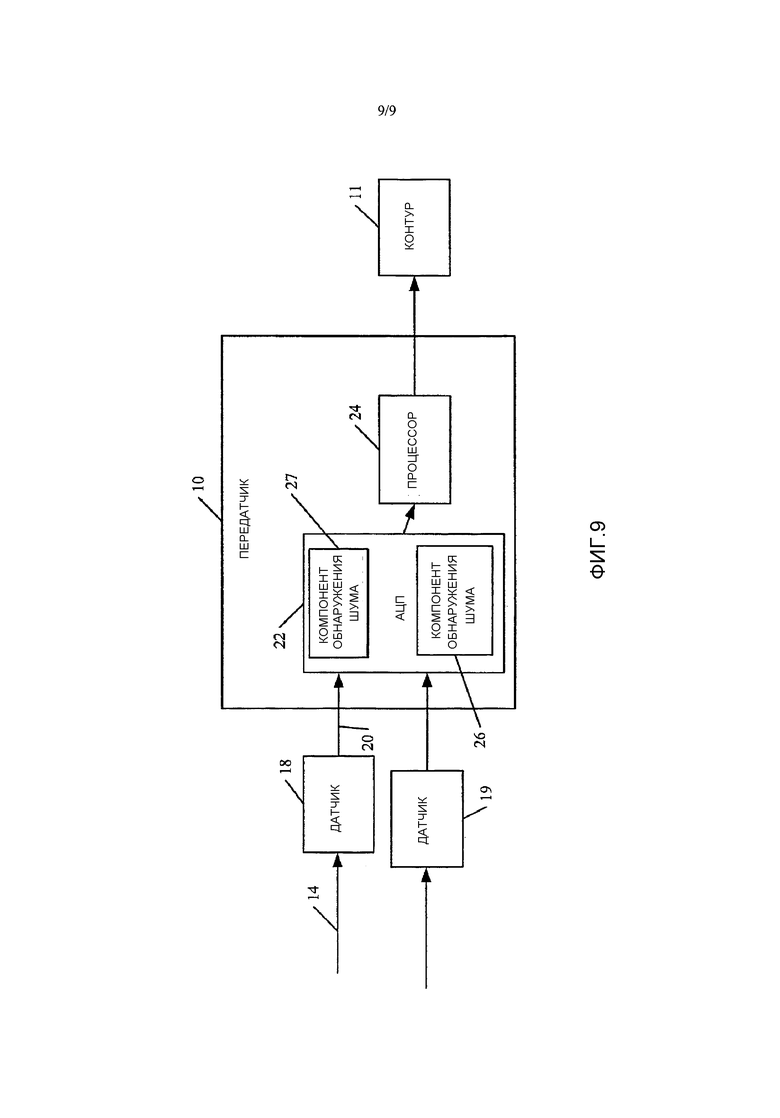
ФИГ. 9 является блок-схемой, аналогичной изображенной на ФИГ. 3, за исключением наличия множества датчиков.
ПОДРОБНОЕ ОПИСАНИЕ
Детектор уровня шума обнаруживает случаи как положительного, так и отрицательного шума в передатчике параметра процесса. Детектор может также осуществлять это в процессе снятия измерения таким образом, чтобы можно было определить изменение в процессе измерения. Детектор выдает сигнал, соответствующий шуму, в процессор, который может охарактеризовать шум и предложить обработку.
ФИГ. 1 является упрощенной схемой промышленной системы 5 управления процессом. На ФИГ. 1 трубопровод 7 переносит технологическую текучую среду. Передатчик 10 параметра процесса выполнен с возможностью соединения с технологическим трубопроводом 7. Передатчик 10 включает в себя датчик 18 параметра процесса, который в одном варианте осуществления содержит термопару или другой датчик температуры. Тем не менее, это приведено только в качестве примера. Передатчик 10 передает информацию в удаленную область, такую как комната 6 управления процессом. Передача может осуществляться через контур управления процессом, такую как двухпроводный контур 11 управления. Контур управления процессом может соответствовать любому желаемому формату, включая, например, 4-20 мА контур управления процессом, контур управления процессом, который осуществляет цифровую связь, беспроводной контур управления процессом и т.д. В примере, изображенном на ФИГ. 1, контур 11 управления процессом питается от источника 6А питания в комнате 6 управления. Эта энергия применяется для обеспечения энергией передатчика 10 параметра процесса. Резистор 6В датчика может применяться для считывания тока, проходящего через контур 11, хотя можно применить также и другие подходы.
ФИГ. 2 является блок-схемой части промышленной системы 5 управления процессом, изображенной на ФИГ. 1, и передатчик 10 изображен более подробно. На ФИГ. 2 датчик 18 в качестве иллюстрации является датчиком параметра процесса, который принимает входной сигнал 14 от контролируемого процесса. Входной сигнал 14 в качестве иллюстрации характеризует технологическую текучую среду, проходящую через трубопровод 7, а датчик 18 в качестве иллюстрации является датчиком температуры. Тем не менее, датчик 18 может также являться другим типом датчика, таким как один из датчиков для считывания давления, уровня pH, скорости потока и т.д. Датчик 18 мог бы также быть одним из числа различных типов датчиков температуры. Например, датчик 18 может являться термопарой или термопреобразователем сопротивления (RTD). В последнем случае передатчик 10 также включает управляемый источник тока, который обеспечивает ток возбуждения для датчика 18. В любом из этих вариантов осуществления датчик 18 в качестве иллюстрации предоставляет аналоговый выходной сигнал 20, соответствующий считываемому параметру, аналого-цифровому преобразователю 22 (АЦП) в передатчике 10.
В одном варианте осуществления следует отметить, что выходной сигнал 20 от датчика 18 может в качестве иллюстрации быть предоставлен цепи (не изображена), которая усиливает и фильтрует аналоговый сигнал подходящим образом. Она может являться частью датчика 18 или передатчика 10, или отдельной цепью. Усиленный и отфильтрованный сигнал 20 затем передается АЦП 22. АЦП 22 предоставляет оцифрованный выходной сигнал процессору 24, который является цифровым отображением аналогового сигнала 20, предоставленного датчиком 18. Процессор 24 имеет ассоциативную память и синхронизирующую цепь, и предоставляет информацию об определенном параметре через контур 11 управления процессом. Следует отметить, что процессор 24 может включать цепь входа/выхода (I/O), или цепь входа/выхода может быть предоставлена отдельно, которая передает информацию в цифровом формате в контур 11, или в аналоговом формате путем регулирования тока, проходящего через контур 11.
Вариант осуществления, изображенный на ФИГ. 2, изображает, что АЦП 22 также включает компонент 26 обнаружения шума. Компонент 26 обнаружения шума осуществляет мониторинг уровня шума в выходном сигнале 20 датчика и расположен либо внутри, либо вовне АЦП 22. Компонент 26 изображен вне АЦП 22 в примере, изображенном на ФИГ. 2, но это изображение приведено только в качестве примера. Компонент 26 обнаружения шума осуществляет мониторинг шума в процессе оцифровки входного сигнала 20 в АЦП 22.
ФИГ. 3 является более подробной схемой АЦП 22 и компонента 26 обнаружения шума. В варианте осуществления, изображенном на ФИГ. 3, АЦП 22 в качестве иллюстрации включает дифференциальный усилитель 30 и сигма-дельта преобразователь 32. Сигма-дельта преобразователь 32 изображен в качестве примера, и другие механизмы преобразования могут быть также применены.
ФИГ. 3 также изображает, что компонент 26 обнаружения шума в качестве иллюстрации включает детектор 34 шума, переключатель S1 и конденсатор С1. ФИГ. 3 изображает, что датчик 18 имеет два вывода 36 и 38, которые могут быть соединены со входными клеммами 40 и 42, соответственно. В одном варианте осуществления напряжение между клеммами 40 и 42 соответствует температуре, считываемой датчиком 18. ФИГ. 3 также изображает, что датчик 18 может являться датчиком с четырьмя выводами с дополнительными выводами 44 и 46, соединенными с дополнительными клеммами 48 и 50. Или дополнительные датчики могут быть соединены с этими клеммами, и мультиплексор может быть применен для выбора входных сигналов для измерения. Тем не менее, для данного примера описание будет продолжено относительно датчика 18, имеющего два вывода, соединенных с клеммами 40 и 42 соответственно.
Более подробно работа компонента 26 обнаружения шума описана далее со ссылкой на ФИГ. 4 и 5. Вкратце, тем не менее, напряжение Vinput создается между клеммами 40 и 42 и отображает температуру, считываемую датчиком 18. Это входное напряжение подается на дифференциальный усилитель 30, где оно усиливается и подается на преобразователь 32 для преобразования в цифровой сигнал, который подается на процессор 24. Vinput также фиксируется на определенном уровне и подается на конденсатор С1. Это осуществляется путем закрывания переключателя S1. Vinput сравнивается в детекторе 34 шума с пороговым напряжением, заданным для передатчика, за определенное число временных интервалов. Применяют два сумматора (или счетчика). Если разница напряжения между Vinput и пороговым значением, заданным для передатчика, больше или меньше порогового значения, один или два сумматора увеличивают подсчет. Один из сумматоров увеличивает подсчет для случаев шума в положительном направлении, в то время как другой увеличивает подсчет для случаев шума в отрицательном направлении. Значения в сумматорах называются подсчетами 41 шумов. После того, как Vinput оцифровывается преобразователем 32, подсчеты 41 шумов предоставляются детектором 34 шума процессору 24 для применения в характеристике типов обнаруженных шумов.
ФИГ. 4 является более подробной блок-схемой детектора 34 шума. ФИГ. 5 является схемой, иллюстрирующей работу компонента 26 обнаружения шума более подробно. ФИГ. 4 и 5 будут теперь описаны более подробно, связанные друг с другом.
До описания работы, изображенного на ФИГ. 5, сначала будут коротко разъяснены элементы с ФИГ. 4. Vinput с ФИГ. 4 является входным напряжением, поданным на датчик 18 (на ФИГ. 3) и приложенным между выводами 40 и 42. Vinput_latchred является напряжением на конденсаторе С1 (опять на ФИГ. 3), когда переключатель S1 замкнут. Vos_thresh является заданным значением напряжения, которое используется генераторами 60 и 62 положительного и отрицательного пороговых значений для генерации положительного и отрицательного пороговых значений (Vpos_adjust и Vneg_adjust). В изображенном варианте осуществления генераторы пороговых значений состоят из набора суммирующих узлов 60 и 62. Vinput_latched добавляется к пороговому значению шума Vos_thresh в суммирующем узле 60, а Vos_thresh вычитается из Vinput_latched в суммирующем узле 62. Следует также отметить, что пороговое значение шума Vos_thresh может быть определено эмпирически, или оно может меняться для различных областей применения. Аналогично, два разных пороговых значения могут применяться для генерации Vpos_adjust и Vneg_adjust. В одном варианте осуществления значение(я) Vos_thresh устанавливается во встроенном программном обеспечении или во время изготовления, так что пользователю не нужно его задавать или регулировать. Кроме того, оно может регулироваться пользователем, и решение о том, каким именно должно быть пороговое значение напряжение, может приниматься в процессе эксплуатации. Также пороговые значения могут изменяться на основании множества различных параметров, таких как значение сигнала датчика, или других параметров.
Получившиеся положительное и отрицательное пороговые значения напряжения (Vpos_adjust и Vneg_adjust) подаются на компараторы 64 и 66, где они сравниваются с Vinput. Выходные сигналы компараторов 64 и 66 подаются на вход счетчиков 68 и 70, соответственно, которые получают входной тактовый сигнал от генератора 72 тактовых импульсов. Когда Vinput превышает Vpos_adjust в положительном направлении, и когда генератор 72 тактовых импульсов подает тактовый импульс, счетчик 68 добавит единицу. Аналогично, когда Vinput превышает Vneg_adjust в отрицательном направлении, и когда генератор 72 тактовых импульсов подает тактовый импульс на счетчик 70, счетчик 70 добавит единицу. По сути, на каждом временном интервале генератора 72 тактовых импульсов выходные сигналы компараторов 64 и 66 оцениваются, и регистраторы шума (или счетчики) 68 и 70 применяются для суммирования подсчетов, соответствующих как положительным, так и отрицательным случаям шумов, если превышаются положительные и отрицательные пороговые напряжения (Vpos_adjust и Vneg_adjust). Счетчик 73 обновления также синхронизируется генератором 72 тактовых импульсов и предоставляет способ обновления Vinput_latch с предварительно заданной скоростью обновления. Счетчик обновления увеличивает счет вплоть до периода обновления, когда он обновляет напряжение, фиксированное на конденсаторе С1, со скоростью обновления, основанной на выходном сигнале со счетчика 73.
Вариант осуществления, изображенный на ФИГ. 4, является только одним иллюстрирующим вариантом осуществления, и другие могут быть также использованы. Например, в некоторых областях применения только один счетчик шумов может быть применен, который увеличивает счет для случаев положительных шумов и уменьшает подсчет для случаев отрицательных шумов. Это может применяться для характеристики симметрии шума, например.
С данным объяснением с ФИГ. 4, работа АЦП 22 для определения шума в целом будет сейчас описана со ссылкой на ФИГ. 5. ФИГ. 3-5 будут описаны как связанные друг с другом.
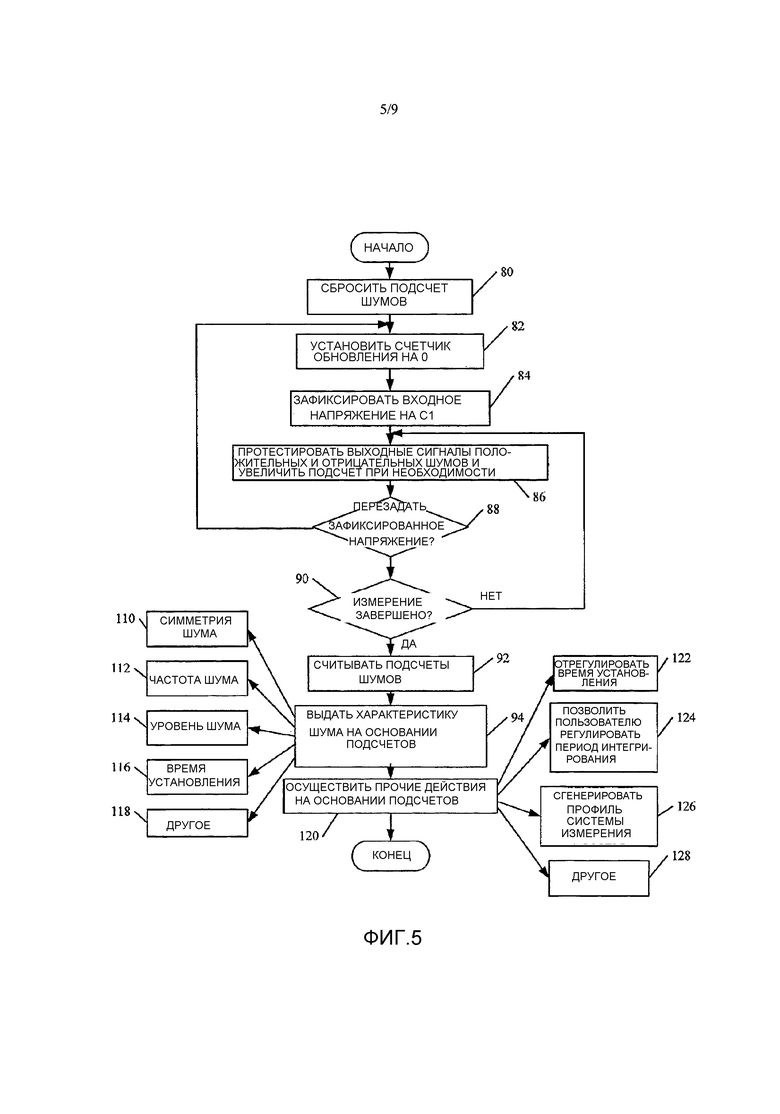
В одном варианте осуществления до обнаружения шума процессор 24 подает сигнал сброса счетчикам 68 и 70 для сброса счетчиков шумов. Это обозначено блоком 80 на ФИГ. 5. Процессор 24 также иллюстративно сбрасывает счетчик обновления 73. Это обозначено блоком 82 на ФИГ. 5.
Процессор 24 затем фиксирует Vinput на конденсаторе С1 путем замыкания переключателя S1. Это обозначено блоком 84 на ФИГ. 5. Vinput может быть зафиксировано на конденсаторе С1 в некоторый момент времени, во время которого преобразователь 32 осуществляет аналого-цифровое преобразование Vinput. В одном варианте осуществления оно фиксируется в начале процесса преобразования, но оно может также периодически обновляться. Т.е. процессор 24 может размыкать переключатель S1 и снова замыкать его каждое X число счетов, выданных счетчиком 73 обновления. Определенная скорость обновления может быть задана эмпирически, или может регулироваться на основании заданной области применения, или каким-либо другим способом. Она может быть задана во встроенном программном обеспечении или во время изготовления, так что пользователю не нужно задавать скорость обновления. Кроме того, пользователь может быть обеспечен возможностью повторно задавать скорость обновления по желанию.
В любом случае, когда Vinput зафиксировано на конденсаторе С1, суммирующие узлы 60 и 62 генерируют положительное и отрицательное пороговые напряжения Vpos_adjust и Vneg_adjust, которые подаются на компараторы 64 и 66. Как было вкратце упомянуто выше, когда Vinput превышает Vpos_adjust в положительном направлении, счетчик 68 увеличивает счет с каждым тактом генератора 72 тактовых импульсов. Аналогично, когда Vinput превышает отрицательное граничное значение Vneg_adjust в отрицательном направлении, счетчик 70 увеличивает счет с каждым тактовым интервалом генератора 72 тактовых импульсов. Необходимая проверка выходных сигналов положительного и отрицательного шумов и увеличение счета счетчиков 68 и 70 обозначены блоком 86 на ФИГ. 5. После каждого тактового интервала определяется, достиг ли счетчик 73 обновления значения подсчета, которое указывает, что фиксированное напряжение Vinput_latched должно быть обновлено. В таком случае обработка возвращается к блоку 82, где счетчик 73 обновления установлен равным нулю. Принятие решения о необходимости сброса счетчика обновления обозначено блоком 88 на ФИГ. 5.
Если на блоке 88 принимается решение, что нет необходимости сбрасывать счетчик обновления, процессор 24 определяет, закончил ли преобразователь 32 измерение Vinput. Это обозначено блоком 90 на ФИГ. 5. Если нет, обработка возвращается к блоку 86, на котором детектор 34 продолжает сравнивать выходные сигналы положительного и отрицательного шумов и увеличивать подсчет счетчиков 68 и 70, если это необходимо.
Тем не менее, если на блоке 90 определяется, что аналого-цифровое преобразование завершено, подсчеты 41, предоставляемые счетчиками 68 и 79, подаются на процессор 24. Это обозначено блоком 92 на ФИГ. 5. Процессор 24, в свою очередь, может охарактеризовать обнаруженный шум на основании подсчетов 41.
Процессор 24 может затем выдавать характеристики шумов, которые были определены, на основании подсчетов 41 от счетчиков 68 и 70. Выдача характеристик шумов обозначена блоком 94 на ФИГ. 5.
При том что существует большое множество различных характеристик шумов, которые могут быть определены процессором 24 на основании подсчетов 41, с целью простоты сейчас будет описано только определенное число из них.
Первая характеристика шума называется симметрией шума. Если как положительный, так и отрицательный счетчики 68 и 70 предоставляют равные подсчеты, и эти подсчеты не превышают порогового значения (т.е. они не больше), процессор 24 может определить, что шум симметричен. Это может обеспечить указание на то, что выходное значение измерения будет подвергнуто воздействию шума измерения, но это позволяет процессору 24 обеспечить указание для пользователя на то, что может существовать ухудшенное состояние. Этот тип шума может наводиться деградирующими термопарами в промышленной среде, где шумовые токи вызывают измеримые напряжения, наводящиеся на линиях с большим полным сопротивлением. Это может проинформировать пользователя о том, что следует провести техническое обслуживание их измерительной схемы датчика, или другое техническое обслуживание.
Второй характеристикой является частота шума. То есть, процессор 24 может учитывать скорость обновления, которая определяет период, через который Vinput фиксируется на конденсаторе C1, и также значение подсчетов, выдаваемых счетчиками 68 и 70. При наличии данных параметров можно определить примерную частоту шума. Если новый уровень напряжения периодически фиксируется в процессе измерения, а подсчеты шумов все так же увеличиваются, это позволяет процессору 24 установить, по меньшей мере, примерно, величину шума, присутствующего в данном измерении.
Еще одной характеристикой шума является уровень шума. Уровень шума может быть определен по значению счетов, выдаваемых счетчиками 68 и 70, и по выбранному пороговому значению напряжения Vos_thresh. Пороговое значение может регулироваться для предоставления информации процессору 24, и, в конечном итоге, пользователю, о том, как много шума присутствует в системе. Это может быть важным, когда термо-электродвижущая сила (ЭДС) генерируется на линиях измерения RTD. Если точки соединения корродированны или изношены, и вдоль этого соединения существуют температурный градиент, динамическое состояние ЭДС может быть вызвано для RTD измерения. В таком случае пользователь может быть предупрежден об этом, так что он сможет провести техническое обслуживание измерительной схемы. Процессор 24 может генерировать сообщение, которое информирует пользователя о том, что необходимо техническое обслуживание.
Еще одна характеристика шума указывает, является ли время установления достаточным. То есть, если напряжение Vinput измерения зафиксировано на конденсаторе С1 в начале процесса оцифровки, осуществляемого преобразователем 32, и, принимая, что есть относительно большие значения счетов шумов в положительном или отрицательном направлениях (или в обоих), то процессор 24 может определить, что время установления необходимо регулировать. После регулирования времени установления новое измерение может быть проведено. Этот процесс может помочь инициализировать время установления для соединенного измерительного контура для обеспечения большего уровня точности с лучшей скоростью обновления.
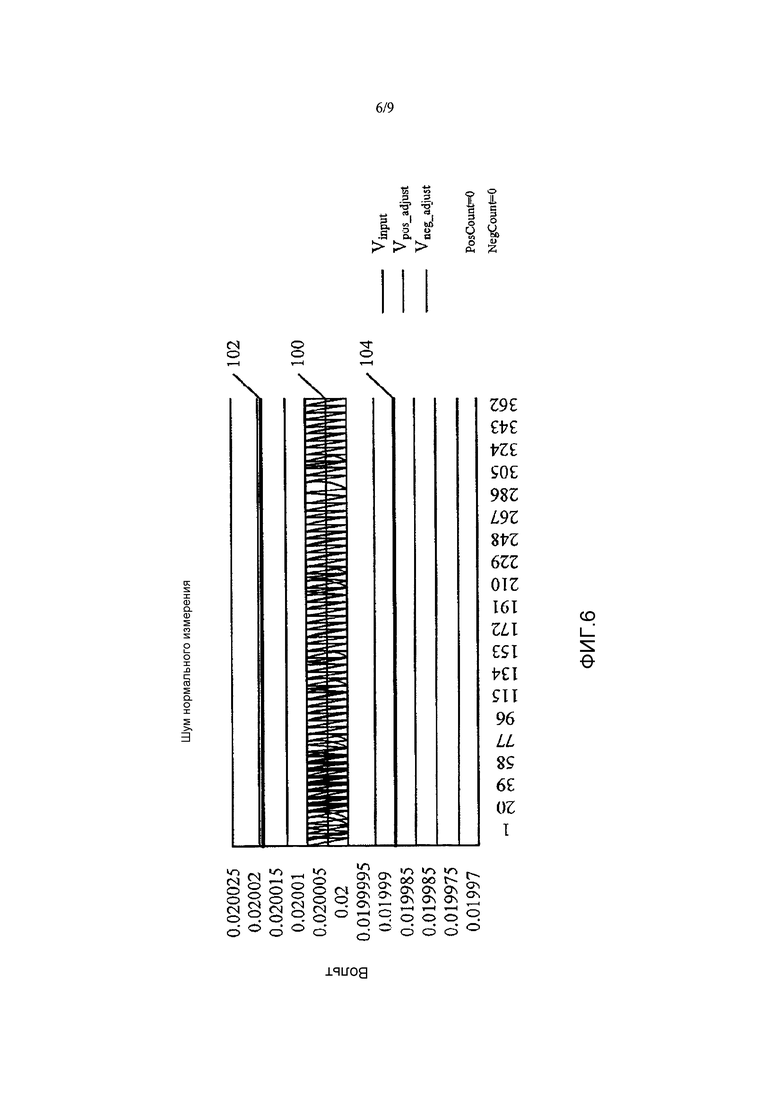
ФИГ. 6-8 являются графиками зависимости подсчетов 68 и 70 по оси x от напряжения по оси y. ФИГ. 6-8 иллюстрируют некоторые из характеристик шума. На ФИГ. 6 Vinput представлено линией 100, а Vpos_adjust представлено линией 102, в то время как Vneg_adjust представлено линией 104. ФИГ. 6 изображает то, что может быть отображением нормального шума измерения. То есть, Vinput изменяется строго внутри пороговых значений, представленных пороговыми напряжениями 102 и 104. Можно увидеть, что оба выходных сигнала со счетчиков 68 и 70 нулевые, так как Vinput не перешло ни одного из пороговых значений 102 или 104 в течение цикла измерения.
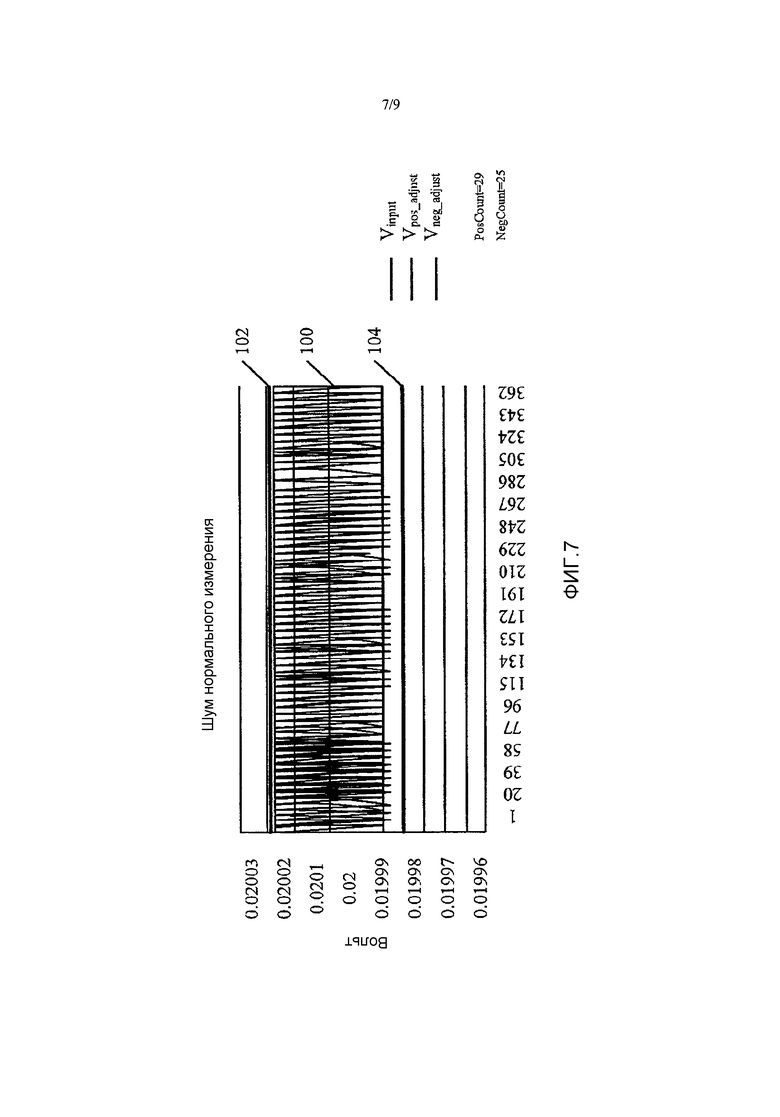
ФИГ. 7 аналогична ФИГ. 6, и схожие элементы пронумерованы схожим образом. Тем не менее, на ФИГ. 7 можно увидеть, что Vinput 100 переходит пороговые напряжения 102 и 104 определенное количество раз. Положительный подсчет со счетчика 68 равен 29, в то время как отрицательный подсчет со счетчика 70 равен 25. Это указывает на то, что шум немного асимметричен в положительном направлении.
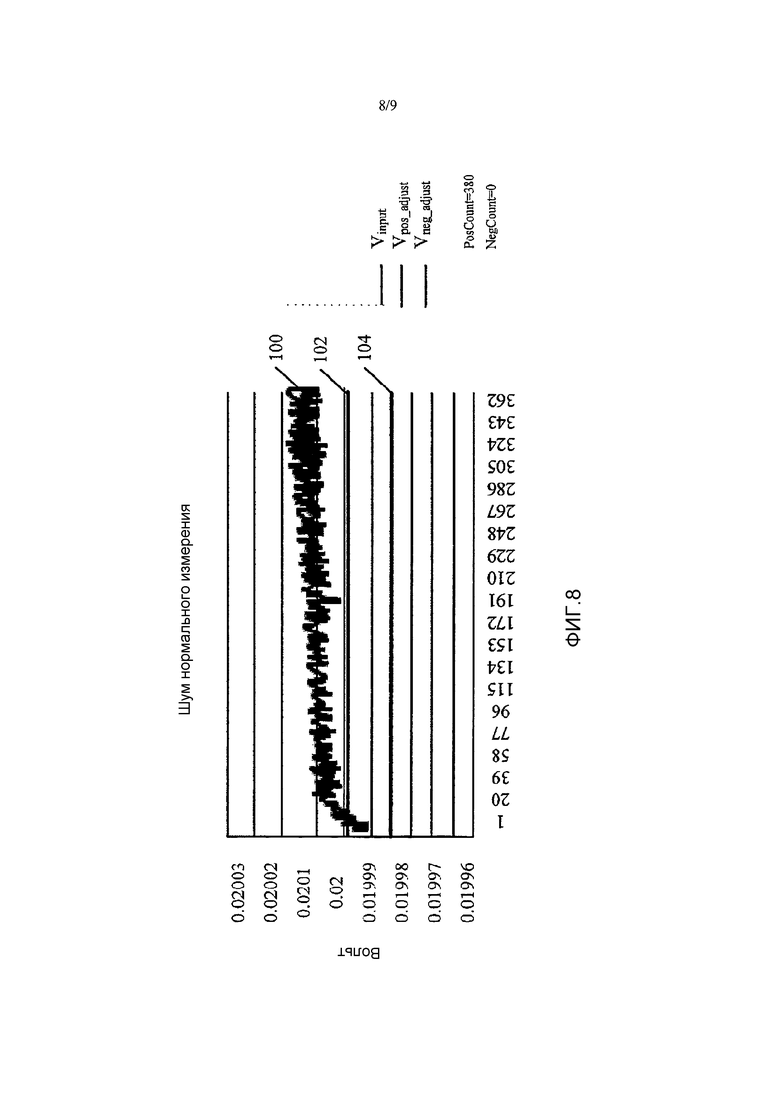
ФИГ.8 также аналогична ФИГ. 6, и схожие элементы пронумерованы схожим образом. Тем не менее, ФИГ. 8 изображает, что за исключением самого начала цикла измерения Vinput все время находится выше положительного порогового значения 102. Следовательно, положительный подсчет, выдаваемый счетчиком 68, равен 380, в то время как отрицательный счет отсутствует. Это указывает на то, что время установления не точно, и его необходимо отрегулировать.
Ссылаясь снова на ФИГ. 5, выдача процессором 24 указание на характеристику шума, соответствующую симметрии шума, обозначена блоком 110. Выдача характеристики шума, соответствующей частоте шума, обозначена блоком 112, в то время как выдача характеристики шума, соответствующей уровню шума, обозначена блоком 114, а выдача указания, отображающего время установления, обозначена блоком 116. Конечно, процессор 24 может также генерировать другие выходные сигналы 118, соответствующие другим характеристикам шума.
Будет оценено, что процессор 24 или другие компоненты передатчика 10 могут осуществлять другие действия, также основанные на счетах, выдаваемых счетчиками 68 и 70. Осуществление этих прочих действий обозначено блоком 120 на ФИГ. 5. Например, процессор 24 может регулировать время установления, что обозначено блоком 122, или он может позволять пользователю регулировать период интегрирования для цикла измерения, что обозначено блоком 124. Аналогично, процессор 24 может генерировать профиль системы измерения на основании характеристик шума, определенных из подсчетов 41, выданных счетчиками 68 и 70. Это обозначено блоком 126 на ФИГ. 5. Генерация профиля может быть осуществлена множеством способов. Например, применяя процесс обучения, такой как статичный мониторинг процесса, процессор 24 может генерировать профиль для системы измерения, на который потом можно ссылаться. Это может помочь понять, какие уровень шума, скорость обновления и время установления должны использоваться для конфигурации каждой отдельной установки пользователя. Уровень шума при запуске может быть также применен как опорное значение для сравнения с другими периодами снятия измерений во времени. Передатчик 10 или другие компоненты могут осуществлять также множество других действий, и это обозначено блоком 128 на ФИГ. 5.
Аналогично, подсчеты могут применяться для определения частоты линии, воздействию которой может быть подвержен контур измерения. Например, в некоторых установках пользователя частота линии (такая как 50 Гц или 60 Гц) может являться частотой линий измерения. В таких установках пользователь может быть обеспечен регулируемым параметром, который позволяет интеграцию измерения за этот период времени.
Также будет оценено, что множество компонентов 26 обнаружения шума могут быть обеспечены в данном передатчике 19. Каждый из них может быть выполнен с возможностью обрабатывать различную характеристику шума в течение цикла измерения. Например, один компонент 26 обнаружения шума может быть выполнен с возможностью отдельно определять время установления, в то время как другой может быть сфокусирован на частоте шума, а еще один на уровне шума и т.д.
Кроме того, компонент 26 обнаружения шума может быть применен для непрерывного мониторинга шума на каждом из множества различных датчиков независимо, даже когда заданный выходной сигнал датчика не измеряется в данный момент передатчиком 10. ФИГ. 9 изображает такой вариант осуществления, который аналогичен изображенному на ФИГ. 2, за исключением того, что второй датчик 19 также изображен. Конечно, множество дополнительных датчиков может быть обеспечено, и ФИГ. 9 изображает только два датчика в качестве примера. В варианте осуществления с ФИГ. 9 может быть, что передатчик 10 получает одновременно только один входной сигнал от датчика через мультиплексор. Таким образом, может быть, что передатчик 10 не измеряет выходной сигнал датчика 18, так как он измеряет выходной сигнал датчика 19. В таком случае, тем не менее, компонент 27 обнаружения шума все еще определяет шум выходного сигнала с датчика 18. Таким образом, при том, что компонент 26 обнаружения шума определяет шум датчика 19, с которого в данный момент снимаются измерения преобразователем 22, шум выходного сигнала датчика 18 также определяется компонентом 27 обнаружения шума, так как определение шума выходного сигнала датчика, когда с него не снимаются измерения, также может быть значимо и полезно. Этот вариант осуществления может также позволить системе охарактеризовать различия шумов между различными датчиками.
Система может также помочь точно компенсировать определенный шум. Когда шум охарактеризован, компенсация становится более точной. Кроме того, тактовый импульс, применяемый для синхронизации счетчиков, может регулироваться для получения большего количества информации. Если частоту синхронизации увеличить, можно определить компоненты шума более высокой частоты. Таким образом, частота синхронизации может регулироваться по желанию.
Хотя данное изобретение и было описано со ссылкой на предпочтительные варианты осуществления, специалисты в данной области техники распознают, что изменения могут быть сделаны относительно формы и деталей, не выходя за рамки сущности и объема изобретения.
Группа изобретений относится к передатчикам параметра процесса. Технический результат – повышение точности измерения параметра процесса. Для этого передатчик параметра процесса включает в себя аналого-цифровой преобразователь (АЦП), который принимает сигнал датчика, предоставляемый датчиком, который считывает параметр процесса и преобразует сигнал датчика в цифровой сигнал. Процессор принимает цифровой сигнал и предоставляет выходной сигнал измерения, соответствующий цифровому сигналу. Детектор шума принимает сигнал датчика и генерирует первое значение, соответствующее числу событий положительных шумов относительно положительного порогового значения, и второе значение, соответствующее числу событий отрицательных шумов относительно отрицательного порогового значения. Процессор оценивает подсчет шумов и генерирует выходной сигнал шума, соответствующий обнаруженному шуму, на основании первого и второго значений. 3 н. и 18 з.п. ф-лы, 9 ил.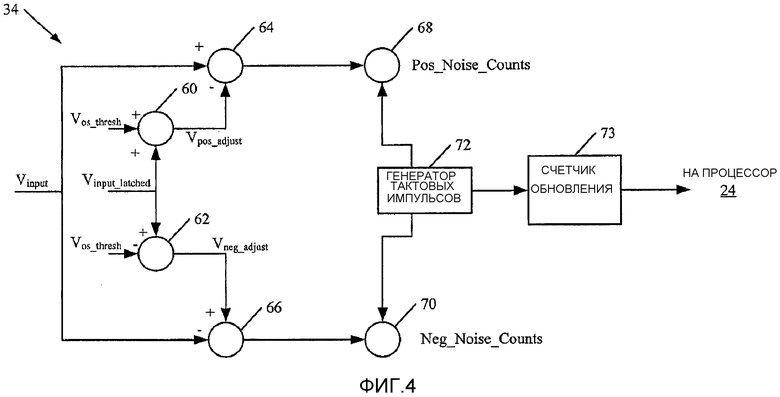
1. Передатчик параметра процесса, содержащий:
датчик параметра процесса, выполненный с возможностью измерять параметр процесса для технологического процесса и предоставлять в ответ сигнал датчика, представляющий измеренный параметр процесса;
аналого-цифровой преобразователь (АЦП), который принимает сигнал датчика и преобразует сигнал датчика в цифровой сигнал со скоростью преобразования;
процессор, который принимает цифровой сигнал и предоставляет выходной сигнал измерения, указывающий на параметр процесса на основании цифрового сигнала; и
детектор шума, который принимает сигнал датчика со скоростью обновления, которая больше, чем скорость преобразования, и генерирует первое значение, указывающее на число событий положительных шумов относительно положительного порогового значения, и второе значение, указывающее на число событий отрицательных шумов относительно отрицательного порогового значения, причем процессор оценивает события положительных шумов и события отрицательных шумов и генерирует выходной сигнал шума, который указывает на обнаруженный шум на основании первого и второго значений;
причем детектор шума содержит:
генератор положительного порогового значения шума, который принимает сигнал датчика и генерирует положительное пороговое значение в качестве положительного порогового напряжения; и
генератор отрицательного порогового значения шума, который принимает сигнал датчика и генерирует отрицательное пороговое значение в качестве отрицательного порогового напряжения,
причем события положительных шумов соответствуют сигналам, превышающим положительное пороговое значение в положительном направлении, а события отрицательных шумов соответствуют сигналам, превышающим отрицательное пороговое значение в отрицательном направлении.
2. Передатчик параметра процесса по п. 1, в котором детектор шума дополнительно содержит:
счетчик положительных шумов, который принимает сигнал датчика, входной тактовый сигнал и положительное пороговое напряжение и увеличивает события положительных шумов с каждым тактовым импульсом тактового сигнала, когда сигнал датчика превышает положительное пороговое напряжение в положительном направлении.
3. Передатчик параметра процесса по п. 2, в котором детектор шума дополнительно содержит:
счетчик отрицательных шумов, который принимает сигнал датчика, входной тактовый сигнал и отрицательное пороговое напряжение и увеличивает события отрицательных шумов с каждым тактовым импульсом тактового сигнала, когда сигнал датчика превышает отрицательное пороговое напряжение в отрицательном направлении.
4. Передатчик параметра процесса по п. 3, в котором процессор генерирует выходной сигнал шума на основании суммирования событий положительных и отрицательных шумов.
5. Передатчик параметра процесса по п. 4, в котором процессор генерирует выходной сигнал шума в качестве характеристики шума на основании суммирования событий положительных и отрицательных шумов.
6. Передатчик параметра процесса по п. 5, в котором процессор генерирует характеристику шума при преобразовании на АЦП сигнала датчика в цифровой сигнал.
7. Передатчик параметра процесса по п. 5, в котором процессор генерирует выходной сигнал шума путем анализа первого и второго значений для определения симметрии шума, частоты шума и уровня шума.
8. Передатчик параметра процесса по п. 6, в котором АЦП преобразует сигнал датчика в цифровой сигнал за время установления и в котором процессор генерирует выходной сигнал шума для определения, влияет ли время установления на погрешность измерения.
9. Передатчик параметра процесса по п. 5, в котором процессор генерирует профиль шума для передатчика параметра процесса на основании характеристики шума во времени.
10. Передатчик параметра процесса по п. 1, в котором процессор периодически фиксирует сигнал датчика на запоминающем конденсаторе со скоростью обновления, и в котором генераторы положительного и отрицательного пороговых значений шума принимают в качестве сигнала датчика напряжение на запоминающем конденсаторе.
11. Передатчик параметра процесса по п. 10, в котором детектор шума дополнительно содержит:
счетчик обновления, причем процессор обновляет сигнал датчика, зафиксированный на запоминающем конденсаторе, на основании выходного сигнала счетчика обновления.
12. Передатчик параметра процесса по п. 1, в котором детектор шума является частью АЦП.
13. Передатчик параметра процесса по п. 1, в котором детектор шума отделен от АЦП.
14. Передатчик параметра процесса по п. 1, в котором процессор предоставляет выходной сигнал измерения по контуру управления процессом.
15. Передатчик параметра процесса по п. 1, в котором датчик содержит по меньшей мере один датчик температуры, выбранный из группы, содержащей термопреобразователь сопротивления и термопару.
16. Передатчик параметра процесса по п. 1, в котором выходной сигнал шума указывает на шум линии.
17. Передатчик параметра процесса по п. 1, в котором детектор шума осуществляет мониторинг шума по множеству сигналов датчиков.
18. Способ измерения параметра процесса в передатчике параметра процесса, содержащий:
измерение параметра процесса с помощью датчика параметра процесса и предоставление в ответ аналогового сигнала датчика;
прием от датчика аналогового сигнала датчика, указывающего на параметр процесса;
преобразование аналогового сигнала датчика в цифровой сигнал с помощью аналого-цифрового преобразователя со скоростью преобразования;
в процессе преобразования аналогового сигнала датчика в цифровой сигнал, суммирование подсчетов положительных шумов в счетчике положительных шумов, которые указывают на события шумов, которые превышают положительное пороговое значение шума в положительном направлении, суммирование подсчетов отрицательных шумов в счетчике отрицательных шумов, которые указывают на события шумов, которые превышают отрицательное пороговое значение шума в отрицательном направлении, со скоростью обновления, которая больше, чем скорость преобразования;
создание характеристики шума по аналоговому сигналу датчика на основании подсчета положительных шумов и подсчета отрицательных шумов; и
генерация выходного сигнала в контуре управления процессом, указывающего на цифровой сигнал и характеристику шума по аналоговому сигналу датчика.
19. Способ по п. 18, в котором суммирование подсчетов положительных шумов содержит генерацию положительного порогового значения шума на основании сигнала датчика и в котором суммирование подсчетов отрицательных шумов содержит генерацию отрицательного порогового значения шума на основании сигнала датчика.
20. Способ по п. 19, в котором генерация выходного сигнала, указывающего на характеристику шума, содержит:
генерацию выходного сигнала для идентификации по меньшей мере одного из оценки симметрии шума, частоты шума, уровня шума, источника шума и профиля шума для передатчика параметра процесса.
21. Передатчик параметра процесса, содержащий:
датчик температуры процесса, выполненный с возможностью измерения температуры процесса для технологического процесса и предоставления в ответ сигнала датчика температуры процесса;
аналого-цифровой преобразователь (АЦП), который принимает сигнал датчика температуры и преобразует сигнал датчика температуры в цифровой сигнал со скоростью преобразования;
процессор, который принимает цифровой сигнал и управляет током в контуре управления процессом для предоставления выходного сигнала измерения, указывающего на цифровой сигнал; и
детектор шума, который принимает сигнал датчика температуры и генерирует в процессе преобразования сигнала датчика температуры в цифровой сигнал со скоростью обновления, которая выше, чем скорость преобразования, первое значение подсчета, указывающее на число событий положительных шумов относительно положительного порогового значения, и второе значение подсчета, указывающее на число событий отрицательных шумов относительно отрицательного порогового значения, причем процессор генерирует выходной сигнал шума, который указывает на характеристику обнаруженного шума, на основании первого и второго значений подсчета;
причем детектор шума содержит:
генератор положительного порогового значения шума, который принимает сигнал датчика температуры процесса и генерирует положительное пороговое значение в качестве положительного порогового напряжения; и
генератор отрицательного порогового значения шума, который принимает сигнал датчика температуры процесса и генерирует отрицательное пороговое значение в качестве отрицательного порогового напряжения,
причем события положительных шумов соответствуют сигналам, превышающим положительное пороговое значение в положительном направлении, а события отрицательных шумов соответствуют сигналам, превышающим отрицательное пороговое значение в отрицательном направлении.
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 6614271 B1, 02.09.2003 | |||
| US 5600942 A, 11.02.1997 | |||
| ДАТЧИК ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА С ВОЗМОЖНОСТЬЮ ДИАГНОСТИКИ | 2006 |
|
RU2386992C2 |

