Изобретение относится к машиностроению, а именно к кривошипно-пол-н зунным прямолинейно направляющим механизмам с постоянной длиной контура, описанного по крнцевым Точкам составляющих звеньев, может найти применение, в частности, в рабочих органах сельскохозяйственных машин с цепным приводом и переменной шириной захвата и является усовершенствованием изобретения по авт.св.№ 1270461.
Цель изобретения - расширение рабочего диапазонаj что позволяет повысить его производительность.
На чертеже показана кинематическая схема предлагаемого механизма.
Механизм содержит основание 1 с прямолинейной направляющей 2, уста новленные на основании 1 два кривошипа 3 равной длины, ось общего шарнира А которьк пересечена с продольной осью направляющей 2, и установленный в направляющей 2 ползун 4. Общим шарниром D с ползуном 4 связан одними концами первая пара шатунов 5 длина калсдого из которых равна двум длинам кривошипа 3, и вторая пара .шатунов 6, по длине равных друг дру- гу. Шатуны 5 первой пары своими серединами через шарниры В и в связаны каждый с соответствующим кривошипом 3, а шатуны 6 второй пары другими концами через шарниры N и N связаны каждый с соответству1ош 1м рычагом 7, которые, в свою очередь, через шарниры М и М другими концами связаны каждый с соответствующим кривошипом 3. К другим концам шатунов 6 второй пары жестко прикреплены прямолинейные стержни 8 (ML, ML ) одинаковой длины, расположенные вдоль продольных осей шатунов 6 и являющиеся их продолжением. Как частньй случай, шатуны 6 и стержни 8 могут быть выполнены за одно целое.
Механизм работает следующим образом.
При повороте кривошипов 3 на угол 1 от оси сш Метрии шатуны 5 и 6 совершают сложное движение. При этом концы шатунов 5 и 6, связанные шарниром Т), вместе с ползуном 4 совершает прямолинейное однонаправленное движение по оси симметрии DA, -а конц С и с шатунов 5 совершают прямолинейное разнонаправленное движение по оси X, перпендикулярной оси DA.
Из чертежа видно, что длина контура механизма по точкам ACLDL С А постоянна, если в процессе поворота кривошипов 3 на угол i сумма перемещения X с с точки С шатуна 5 и расстояния С между концевыми точками шатунов 5 и стержней В постоянна. Это условие выражается функцией цели
fCi) Xc+/( Xc)«+Y2 const,
где У-с перемещение точки С по
оси X; X1 - перемещение точки L по
оси X; ц - перемещение точки L по
оси Y.
После математических преобразований это выражение можно представить в виде
f(M )2sinM4- i| (b sinof-2 sini) +
..... Ml.. ... ,
+ (2 COS 4-b cosoO const,
где Q - угол поворота кривошипов 3; с/ - угол поворота шатунов 6; b - длина шатунов 6 вместе состержнями 8,
В предлагаемом механизме угол а геометрически связан с переменными звеньями и углом Lf следующим выражением:
, mj+4(1-mj)cos24 +m2j-c2 d arccps 2mj,m2,+4 (f+m О cos if (2--m,)
- arccos
m2+4(1 -m,)cos2M
где m, - расстояние от шарнира A
до шарнира М на кривошипе 3} т - расстояние от шарнира D до
шарнира N на шатуне 6j с - длина рычага 7. В диапазоне угла LC от О до 45 изменчивость контура ACLDL C A не превышает 0,325%.
Формула изобретения Симметричный кривошипно-ползунньй механизм по авт.св. К 1270461, отличающийся тем, что, с целью расширения ра бочего диапазона, механизм снабжен двумя прямолинейными стержнями одинаковой длины, жестко связанными с другими концами соответ- .ствующих шатунов второй пары и являющимися их продолжениями.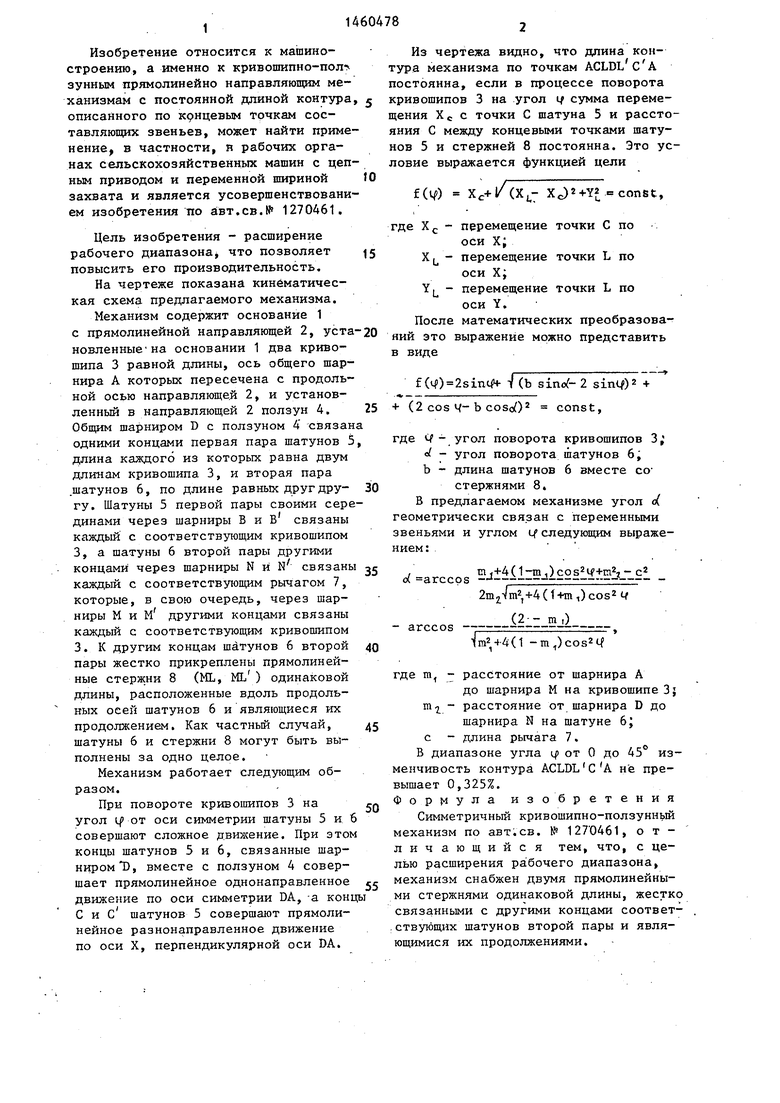
| название | год | авторы | номер документа |
|---|---|---|---|
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2014 |
|
RU2568159C2 |
| Симметричный кривошипно-ползунный механизм | 1985 |
|
SU1270461A1 |
| СИММЕТРИЧНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА | 2015 |
|
RU2609848C2 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2013 |
|
RU2553613C1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2015 |
|
RU2609843C2 |
| Прямолинейно-направляющий механизм | 1990 |
|
SU1803654A1 |
| Уравновешенный кривошипно-ползунный механизм | 1988 |
|
SU1627769A1 |
| КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ БОГДАНОВА СО ЗВЕНОМ, ДВИЖУЩИМСЯ ПРЯМОЛИНЕЙНО-ПОСТУПАТЕЛЬНО | 2015 |
|
RU2609845C2 |
| Дезаксиальный кривошипно-ползунный механизм | 1989 |
|
SU1747775A1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЯРИМОВА ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 2001 |
|
RU2202702C2 |
Изобретение относится к криво- шипно-ползунным прямолинейно направляющим механизмам, с постоянной длиной контура и м.б. применено в частности в рабочих органах сельскохозяйственных машин с цепным приводом и переменной шириной захвата. Цель изобретения - расширение рабочего диапазрна механизма, что обеспечивает повышение производительности машин. На основании 1 с прямолинейной направляющей 2 на общем шарнире А ус« « с, тановлены два кривошипа 3 равной длины. На ползуне 4 общим шарниром D связаны концы основных шатунов 5, равных по длине каждый двум длинам кривошипа 3, и концы дополнительных шатунов 6 равной длины. Оси шарниров кривошипов 3 и шатунов 5, 6 расположены на оси симметрии механизма, совпадающей с продольной осью направляющей 2. Основные шатуны 5 своими серединами шармирно соединены каждый с соответствующим кривошипом 3, а другие концы дополнительных шатунов 6 с помощью рычагов 7 шарнирно соединены каждый со своим кривошипом 3, расположенным по другую сторону от оси симметрии. К другим концам шатунов 6 жестко присоединень стержни 8 один ковой длины, являющиеся продолжением шатунов 6. При повороте кривошипов 3 на угол 0-45° от оси симметрии концы .С, с шатунов 5 движутся разнонаправленно по прямой, а длина контура ACLDL C A остается постоянной. 1 ил. ID О О 00 J o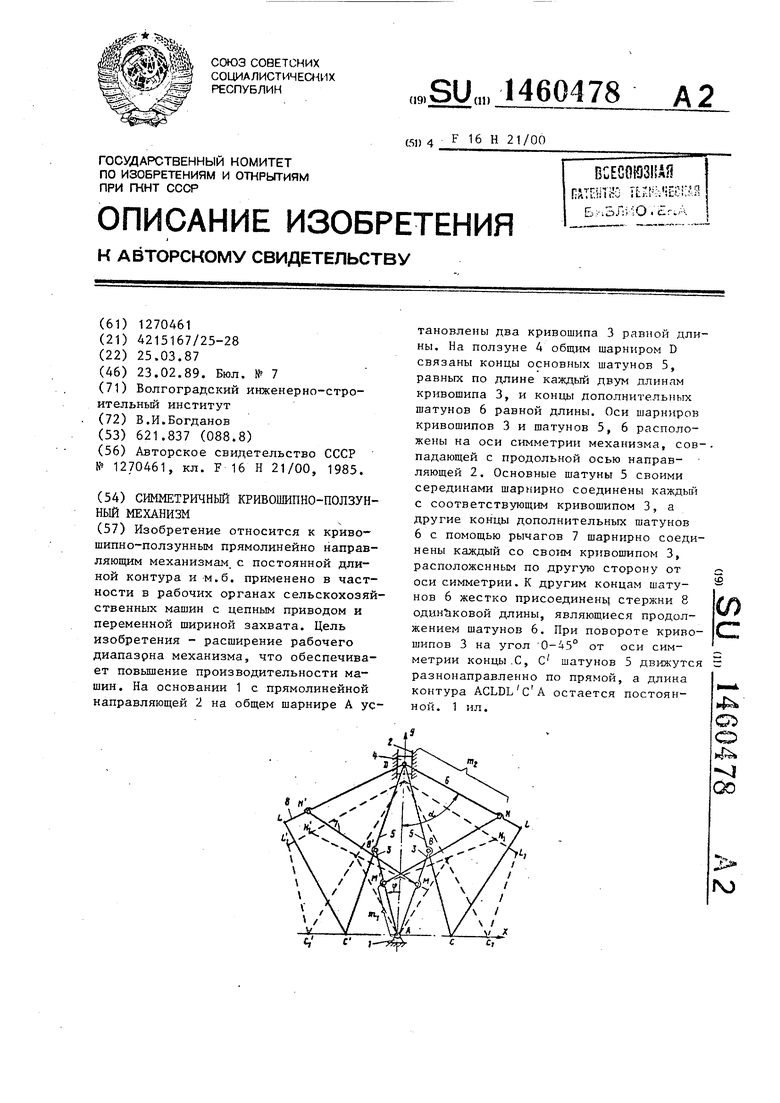
| Симметричный кривошипно-ползунный механизм | 1985 |
|
SU1270461A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
