Изобретение относится к области прецизионного приборостроения и может быть использовано при разработке и производстве гистерезисных гиромоторов для двухстепенных поплавковых гироскопов.
Известен синхронный гистерезисный гиромотор [Гироскопические системы, ч. III. Элементы гироскопических приборов / Под редакцией Д.С. Пельпора.- М.: Высшая школа, 1988, с. 12], который состоит из статора, внутри которого на оси установлен ротор с активной частью. Активная часть ротора представляет собой цилиндрический шихтованный пакет из колец магнитотвердого материала.
Недостатком гиромотора является малый кинетический момент ротора. Кинетический момент ротора в значительной степени определяется его геометрическими размерами. Установка ротора внутри статора ограничивает эти размеры и, соответственно, ограничивает момент инерции. Кроме того, приведенная многозвенная конструкция ротора не удовлетворяет возросшим требованиям к точности современных гироприборов, так как неоднородность коэффициентов линейного расширения материалов наряду с недостатками, связанными с креплением пакета, не могут гарантировать стабильность центра масс ротора при воздействии климатических и механических факторов.
Известен также синхронный гистерезисный гиромотор (далее - гиромотор) [Гиродвигатели / Арбузов Ю.В. и др. / М.: Машиностроение, 1983, с. 38], который принимаем за прототип. Гиромотор содержит внутренний статор, закрепленный на неподвижной оси, наружный ротор, выполненный в виде обода из тяжелого сплава (викаллоя), на внутренней цилиндрической поверхности которого установлена шихтованная активная часть, и два газодинамических полусферических подшипника с подшипниковыми щитами, закрепленными винтами к ободу ротора.
Недостатком прототипа является малая точность работы гироскопа с такого типа гиромотором. Недостаток обусловлен следующим. Шихтованный из листов викаллоя активный пакет ротора завальцован на немагнитной втулке, которая установлена по посадке в обод ротора. Как составной шихтованный пакет, так и обе напряженные посадки обладают механической нестабильностью, приводящей к смещению центра масс. В случае же увеличения усилий посадки в пластинах викаллоя возникают упругие напряжения, вследствие которых сужается петля гистерезиса. При последующих температурных воздействиях происходят изменения магнитных свойств активной части ротора и, следовательно, токов и мощности гистерезисного гиромотора. Изменение же электрических параметров сопровождается нарушением теплового режима гиромотора и возникновением температурного дрейфа гироскопа. В ряде случаев изложенная природа нарушения магнитных характеристик приводит к выпадению ротора гиромотора из синхронизма или к появлению скольжения (псевдосинхронного режима). Таким образом, точность гироскопа, в составе которого используется такой гиромотор, ограничена нестабильностью центра масс многозвенного ротора и изменением его электрических параметров при температурных колебаниях окружающей среды.
Задачей настоящего изобретения является совершенствование технологического процесса изготовления гистерезисного гиромотора.
Достигаемый технический результат - повышение точности работы гироскопа, в составе которого используется предлагаемый гиромотор.
Поставленная задача решается тем, что в известном синхронном гистерезисном гиромоторе, содержащем ротор с размещенным внутри статором, два газодинамических подшипника с подшипниковыми щитами, ротор выполнен сплошным из литого магнитотвердого материала, с кольцевым фланцем, при этом на поверхности фланца равномерно расположены преимущественно шесть отверстий, для его соединения с торцевыми поверхностями подшипниковых щитов крепежными элементами (винтами или болтами), проходящими через эти отверстия.
Сущность изобретения поясняется чертежами фиг. 1-3.
На фиг. 1 изображен в разрезе синхронный гистерезисный гиромотор, в котором в качестве крепежных элементов, соединяющих фланец ротора с подшипниковыми щитами, применены винты;
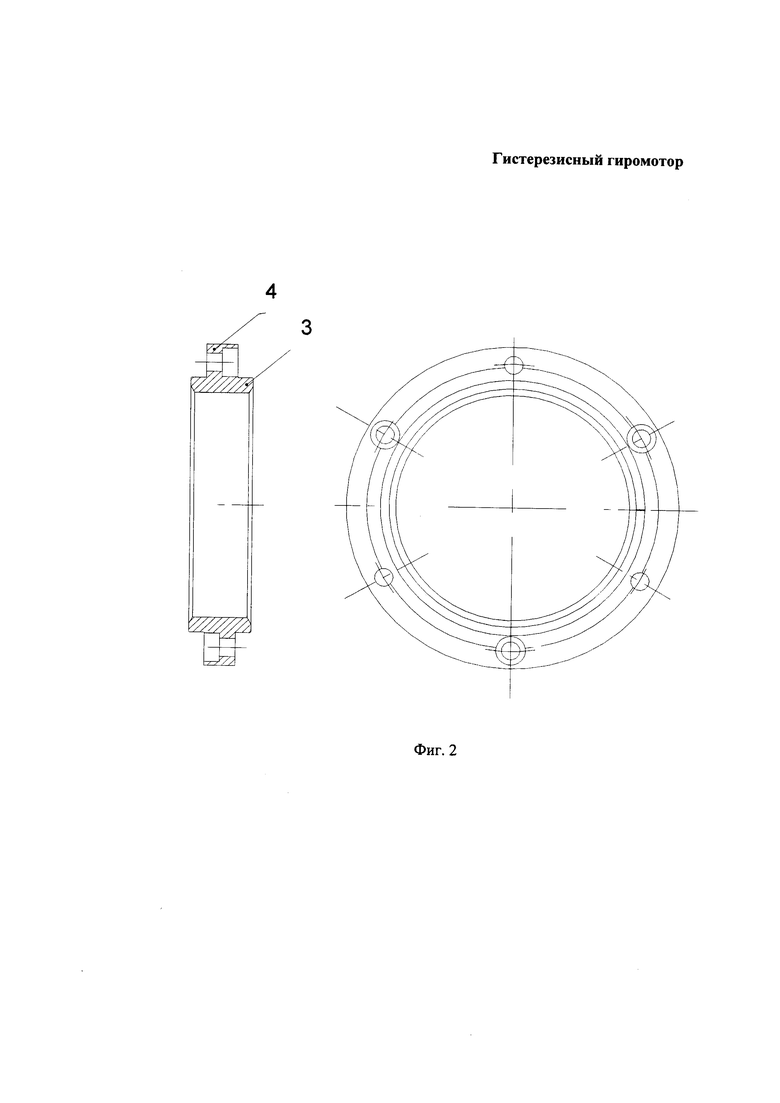
на фиг. 2 - активная часть ротора;
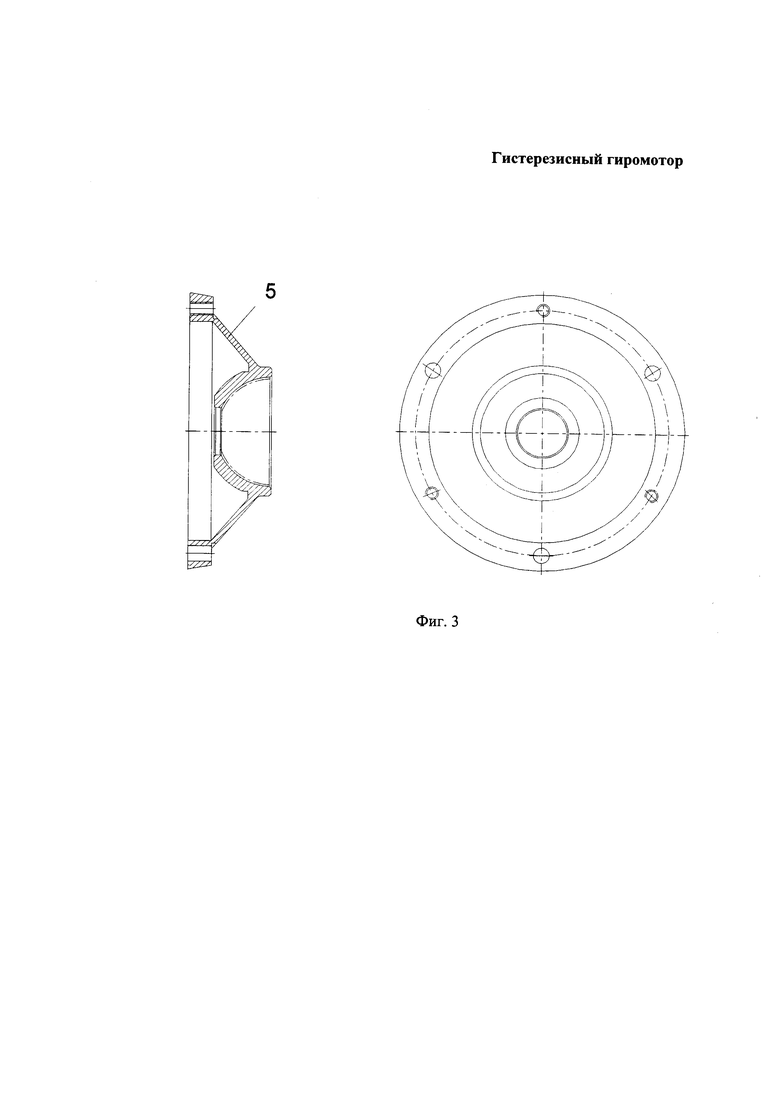
на фиг. 3 - конструктивный вариант выполнения подшипниковых щитов.
Гиромотор, приведенный на фиг. 1, содержит статор 1, закрепленный на оси 2, активную часть 3 ротора с кольцевым фланцем 4, два подшипниковых щита 5, прикрепленных к фланцу 4 ротора винтами 6, два газодинамических подшипника 7.
Активная часть 3 ротора (фиг. 2) выполнена сплошной из литого магнитотвердого материала типа "Альни" и имеет в средней части наружной цилиндрической поверхности кольцевой фланец 4. Подшипниковые щиты 5 (фиг. 1) базируются в радиальном направлении по наружной поверхности активной части 3. В осевом направлении подшипниковые щиты 5 крепятся винтами 6 к торцевым поверхностям кольцевого фланца 4. В приведенном примере каждый щит крепится тремя винтами 6, ввинченными в резьбовые отверстия противоположного щита 5, а фланец 4 ротора имеет шесть сквозных отверстий.
В случае болтового соединения минимальное количество отверстий может быть уменьшено до трех.
Геометрические размеры кольцевого фланца 4 активной части 3 ротора во многом определяются конструктивными соображениями: заданным кинетическим моментом и наружным диаметром обода ротора, механической прочностью и условиями крепления. Однако со стороны гистерезисного гиромотора налагаются некоторые ограничения. Расширение кольцевого фланца 4 по длине гистерезисной машины (гиромотора) приводит к увеличению объема активной части и к снижению рабочей индукции Вр в роторе, что ухудшает к.п.д. гиромотора и не позволяет осуществить его перевозбуждение. Следовательно, кольцевой фланец 4 должен выполняться достаточно узким, но обеспечивающим при этом прочное и надежное крепление подшипниковых щитов 5. Во всяком случае, поперечное сечение фланца 4 не должно превышать сечения активной части ротора.
На фиг. 3 приведен пример конструкции подшипниковых щитов 5.
Разработанное устройство работает следующим образом. Статор 1 подключается к сети переменного тока. Включается повышенное (форсированное) напряжение, достаточное для запуска гиромотора с газодинамических подшипников, которые в первый момент запуска представляют собой опоры скольжения. После взвешивания ротора в газовом потоке производится его разгон до синхронной скорости. Учитывая, что форсированный режим не экономичен, после вхождения ротора в синхронизм производят перевозбуждение гиромотора. Как отмечалось выше, наличие кольцевого фланца 4 ротора приводит к увеличению объема активной части ротора. Поскольку электромагнитная мощность гистерезисного гиромотора пропорциональна активной части 3 ротора, приведенный факт накладывает определенное ограничение на область применения изобретения. Наиболее целесообразно выполнять предлагаемую конструкцию в гистерезисных гиромоторах с газодинамическими опорами, работающими в форсированном режиме запуска, пусковая мощность которых составляет 10-30 Вт. У гиромотора на шарикоподшипниках при малой электромагнитной мощности расчетная толщина активной части составляет 1-2 мм, поэтому магнитный поток будет перераспределяться в зону фланца и нарушится условие оптимального проектирования гистерезисного гиромотора. Кроме того, применение предлагаемого устройства в шарикоподшипниковых устройствах не всегда приводит к достижению поставленной цели повышения точности, так как там не устранены более весомые причины, вызывающие смещение центра масс и обусловленные работой подшипников и состоянием смазки.
В отличие от прототипа, в предлагаемом устройстве отсутствует шихтованный пакет активной части с сопутствующим ему многозвенным составным ротором. Монолитный литой ротор служит несущим элементом конструкции. Жесткое соединение винтами двух подшипниковых щитов с цельной деталью ротора определяет высокую стабильность центра масс вращающейся сборки ротора в осевом направлении. Центральное расположение кольцевого фланца на наружной цилиндрической поверхности обеспечивает симметрию конструкции: все возможные тепловые смещения происходят от базовых торцевых плоскостей фланца. Причем, учитывая относительно малую ширину фланца, можно заключить, что различие коэффициентов температурного расширения сочленяемых деталей не приведет к температурному изменению рабочих зазоров в газодинамических подшипниках.
В радиальном направлении базой является наружная поверхность активной части. Скользящая посадка подшипниковых щитов не приводит к упругим деформациям магнитотвердого материала. Кроме того, литой материал типа "Альни" обладает значительно меньшей магнитострикцией, чем отожженные холоднокатаные пластины из викаллоя. Изменение напряженности магнитного поля и выпуклости петли гистерезиса составляет не более трех раз при радиальных деформациях с усилием до 20 кг. Следовательно, в отличие от прототипа, гарантируется высокая стабильность электрических параметров гистерезисного гиромотора и их независимость от внешних климатических воздействий. Таким образом, точность работы гироскопа с предлагаемым гистерезисным гиромотором повышается как за счет механической стабильности центра масс ротора, так и за счет постоянства электромагнитных характеристик и их независимости от температуры окружающей среды.
Наряду с основными признаками, направленными на достижение поставленной цели, следует отметить некоторые дополнительные преимущества предлагаемого устройства по сравнению с прототипом.
1. За счет вихревых токов, наведенных вращающимся магнитным полем статора, в литом материале ротора возникает асинхронная составляющая электромагнитной мощности и увеличивается пусковой момент гистерезисного гиромотора.
2. Наличие осевых отверстий в кольцевом фланце активной части ротора, равномерно разнесенных по периметру, способствует некоторому перераспределению магнитного потока по сечению. Отверстия увеличивают магнитное сопротивление фланцевой зоны и тем самым выполняют запирающую функцию, уменьшая поток рассеивания. Кроме того, концентрация магнитного потока в зонах между отверстиями характеризует реактивный момент гистерезисного гиромотора, появление которого способствует увеличению максимального синхронного момента и его перегрузочной способности. Причем следует заметить, что указанный эффект достигается без увеличения приведенного воздушного зазора и без возрастания намагничивающей составляющей тока воздушного зазора, как это имеет место в обычных реактивных двигателях.
3. Упрощение конструкции ротора, уменьшение вероятности образования и попадания посторонних частиц в опоры ротора гиромотора (со стороны шихтованной конструкции в прототипе).
Таким образом, по сравнению с прототипом, предлагаемая конструкция гистерезисного гиромотора обладает следующими преимуществами, обеспечивающими повышение точности гироприбора:
1. Уменьшено количество составных элементов ротора, в частности устранен шихтованный пакет активной части и заменен литым магнитотвердым материалом, что повышает стабильность центра масс гиромотора.
2. Сплошная литая активная часть гистерезисного гиромотора является несущим элементом конструкции, в котором задачи базовых поверхностей и крепления подшипниковых щитов выполняет кольцевой фланец, содержащий, по меньшей мере, три осевых сквозных отверстия и расположенный в средней части наружной цилиндрической поверхности.
3. Устранены напряженные посадки, которые имел шихтованный пакет активной части ротора прототипа, влияющие на магнитные свойства активной части, и исключены пластины из викаллоя, воспринимающие упругие деформации и обладающие сильной магнитострикцией, чем существенно застабилизированы электрические параметры гиромотора и его тепловой режим.
4. Наличие осевых сквозных крепежных отверстий в активной части ротора, равномерно разнесенных по периметру, уменьшает потоки рассеяния, что позволяет выполнить гиромотор с оптимальными параметрами, а также способствует увеличению синхронного момента и перегрузочной способности за счет появления дополнительного реактивного момента.
Поставленная задача решена.
На предприятии АО «Концерн «ЦНИИ «Электроприбор» предлагаемое устройство изготовлено и испытано. При испытаниях получены положительные результаты. В настоящее время разрабатывается техническая документация для серийного изготовления в производстве двухстепенных поплавковых гироскопов с предлагаемым гиромотором.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЫПЛАВЛЯЕМЫЙ МАГНИТНЫЙ МАТЕРИАЛ НА ОСНОВЕ МАГНИТОТВЕРДОГО СПЛАВА И СПОСОБ ИЗГОТОВЛЕНИЯ ИЗ НЕГО МОНОЛИТНЫХ МАГНИТОПРОВОДОВ ЭЛЕКТРИЧЕСКИХ МАШИН | 2007 |
|
RU2361307C2 |
| СПОСОБ ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА (ВАРИАНТЫ) И СПОСОБ ЗАПОЛНЕНИЯ ЦИЛИНДРИЧЕСКОГО ГИДРОДИНАМИЧЕСКОГО ПОДВЕСА РОТОРА ГИРОМОТОРА ПОПЛАВКОВОГО ГИРОСКОПА НЕСМЕШИВАЮЩИМИСЯ ЖИДКОСТЯМИ | 2004 |
|
RU2272252C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2015 |
|
RU2588599C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ОБРАЩЕННЫЙ ВЕТРОГЕНЕРАТОР | 2006 |
|
RU2331792C2 |
| Электромагнитный редуктор | 2019 |
|
RU2717820C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2588230C1 |
| Гистерезисный электродвигатель | 1959 |
|
SU131405A1 |
| Синхронный электродвигатель для винта вертолета | 2019 |
|
RU2708382C1 |
| СИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ С МАГНИТНОЙ РЕДУКЦИЕЙ | 2013 |
|
RU2544835C1 |
| ШАГОВЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2015 |
|
RU2596145C1 |

Изобретение относится к области прецизионного приборостроения и может быть использовано при разработке и производстве гистерезисных гиромоторов для двухстепенных поплавковых гироскопов. Гистерезисный гиромотор содержит ротор с размещенным внутри статором, два газодинамических подшипника с подшипниковыми щитами, на поверхности которых выполнены отверстия, ротор выполнен из сплошного литого магнитотвердого материала, при этом ротор выполнен с кольцевым фланцем, на поверхности фланца равномерно расположены преимущественно шесть отверстий для его соединения с торцевыми поверхностями подшипниковых щитов крепежными элементами, проходящими через эти отверстия. Технический результат – повышение точности двухстепенного поплавкового гироскопа, в составе которого используется предлагаемый гиромотор. 2 з.п. ф-лы, 3 ил.
1. Гистерезисный гиромотор, содержащий ротор с размещенным внутри статором, два газодинамических подшипника с подшипниковыми щитами, на поверхности которых выполнены отверстия, при этом ротор выполнен из сплошного литого магнитотвердого материала, отличающийся тем, что ротор выполнен с кольцевым фланцем, на поверхности фланца равномерно расположены преимущественно шесть отверстий для его соединения с торцевыми поверхностями подшипниковых щитов крепежными элементами, проходящими через эти отверстия.
2. Гистерезисный гиромотор по п. 1, отличающийся тем, что в качестве крепежных элементов используются винты.
3. Гистерезисный гиромотор по п. 1, отличающийся тем, что в качестве крепежных элементов используются болты.
| СПОСОБ ВЫСТАВКИ ОСЕВОГО ЗАЗОРА В ГАЗОДИНАМИЧЕСКОМ ПОДВЕСЕ ОСИ ВРАЩЕНИЯ РОТОРА ГИРОМОТОРА | 2014 |
|
RU2554628C1 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП С ШАРОВЫМ ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ | 2004 |
|
RU2264596C1 |
| US 4610172 A1, 09.09.1986 | |||
| СИСТЕМА ОЧИСТКИ ЖИДКИХ ЗАГРЯЗНЕННЫХ ДИЭЛЕКТРИЧЕСКИХ СРЕД | 2024 |
|
RU2829523C1 |

