Техническое решение относится к области гироскопической техники (МПК G 01 с 19/00) и предназначено для реализации в высокоточных поплавковых интегрирующих гироскопах и датчиках угловой скорости для бесплатформенных инерциальных навигационных систем (БИНС).
Список ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1. Ригли, Холлистер, Денхард. Теория, проектирование и испытания гироскопов. Перевод с анл. под ред. Харламова С.А., Москва, Мир, 1972 г.
2. Андрейченко К.П. "О возмущающих моментах сил вязкого трения в подвесе поплавкового гироскопа", МТТ №4, Известия, АН СССР, 1979 г.
3. Никитин Е.А., Пилюгина Н.Н. "Гидродинамические силы и моменты, действующие на поплавок при его движении относительно поплавковой камеры". Труды МВТУ, №372, Москва, 1982 г.
4. Андрейченко К.П. Динамика поплавковых гироскопов и акселерометров, Москва, Машиностроение, 1987 г. (прототип).
Известен способ подвеса ротора гиромотора, включающий шарикоподшипниковый (стр.296 /1/) или газодинамический (стр.314 /1/) подвес ротора гиромотора и собственное вращение ротора - инерционной массы. Недостаток подшипникового подвеса - повышенный уровень вибрации ротора и как следствие повышенный гидромеханический момент, обусловленный пространственными колебаниями цилиндрического чувствительного элемента - поплавка в цилиндрическом его подвесе гидростатического типа /1/. Такой подвес поплавка иногда также называют гидростатическим подвесом чувствительного элемента поплавкового гироскопа. Причем из-за случайной составляющей изменения амплитуды вибрации формируется случайная составляющая скорости дрейфа, не зависящая от ускорения, которая является важнейшим параметром, характеризующим точность поплавкового гироскопа. С целью минимизации этой случайной составляющей был реализован газодинамический подвес ротора гиромотора, который показал себя работоспособным и высокоточным в комфортных условиях работы. При этом стоимость высокоточного подшипникового и особенно газодинамического подвеса значительна (стр.296 /1/). Кроме достаточно высокой точности газодинамический подвес имеет существенный недостаток - это ограниченное количество запусков и остановов из-за механического контакта его поверхностей и повышенного износа в этом режиме. Кроме того газодинамический подвес становится "контактным" в момент начала движения основания с ускорением. Здесь предлагается подвес ротора гиромотора осуществить гидродинамическим способом. Этот подвес имеет повышенную радиальную жесткость по сравнению с газодинамическим и остается бесконтактным при действии перегрузок. Это утверждение проверено при использовании такого подвеса на высоко динамичных основаниях. В сравнении с шарикоподшипниковым подвесом в нем существенно снижен уровень вибрации, формирующий сложные пространственные колебания поплавка, и, как следствие, уменьшается случайная составляющая скорости дрейфа, не зависящая от ускорения. Поэтому применение гидродинамического подвеса наиболее оптимально с точки зрения формирования величины кинетического момента (стр.238 /1/) поплавкового гироскопа.
Первый вариант решения (без ускоренного разгона гидродинамического подвеса ротора-поплавка - инерционной массы). Здесь для ускорения формирования гидродинамического подвеса (т.е. формирования гидродинамического давления жидкости, которая выталкивает и поддерживает поплавок-ротор на оси вращения, т.е. осуществляет радиальное и осевое центрирование поплавка-ротора) и снижения времени контактного разгона ротора-поплавка предлагается дополнительно осуществить разгон поплавковой камеры посредством внешнего механического привода парой электродвигателей. По мере разгона ротора предложено отключать механический привод и осуществлять фиксацию (арретирование) внешней цилиндрической камеры ротора-поплавка носителя кинетического момента. Реализация гидродинамического цилиндрического подвеса цилиндрического поплавка-ротора формирует бесконтактное его собственное вращение на слое поддерживающей жидкости и минимизирует (что самое главное) "внутреннюю" вибрацию в цилиндрическом поплавке подвеса гидростатического типа.
Прототипом для способа заливки подвеса ротора - поплавка несмешивающимися жидкостями выбран способ подвеса ротора гиромотора, включающий шарикоподшипниковый (стр.296 /1/) или газодинамический (стр.314 /1/) подвес ротора гиромотора и собственное вращение ротора - инерционной массы. Недостаток в том, что он содержит только одну операцию, которая может быть применена в предложенном вновь решении.
Известные способы по заполнению подвесов чувствительных элементов гидростатического типа принципиально не могут быть применены при их реализации в связи с принципиальными различиями в принципах действия этих жидкостных подвесов. Гидродинамический подвес предполагает собственное вращение чувствительного элемента - поплавка, а подвес гидростатического типа содержит носитель кинетического момента во внутренней своей полости, а "сам" не осуществляет собственного вращения. Здесь же предлагается заполнение цилиндрического гидродинамического подвеса несмешивающимися жидкостями. Причем жидкость большей плотности должна располагаться (занимать положение) в торцевых частях подвеса на оси собственного вращения поплавка-ротора. Именно такое расположение жидкости большей плотности ρ2 по сравнению с жидкостью плотностью ρ1, размещающейся в радиальном зазоре, позволяет сформировать определенные центрирующие поплавок-ротор свойства при аксиальном смещении поплавка. Способ заполнения жидкостями подвеса ротора не очевиден, поэтому предлагается один из простейших его вариантов.
Задача решения - повышение точности поплавковых приборов (ПИГ и ДУС). Задача решается так, что способ гидродинамического подвеса ротора гиромотора поплавкового гироскопа, включающий вращение инерционной массы в рамке, установленной во внутренней полости цилиндрического поплавка, отличается тем, что инерционную массу выполняют в виде полого цилиндра и помещают во внутреннюю полость цилиндрической камеры, которую устанавливают во внутренней полости цилиндрического поплавка его подвеса гидростатического типа, зазор между цилиндрической инерционной массой ротором-поплавком и цилиндрической камерой заполняют несмешивающимися жидкостями плотности ρ1 и ρ2, причем в торцевых зазорах размещают одинаковые объемы жидкости плотности ρ2, большей плотности ρ1, при этом осуществляют собственное вращение цилиндрической инерционной массы и ее радиальное и осевое центрирование, а величину инерционной массы выбирают близкой массе вытесненной ею жидкости, но обеспечивают при этом положительную аксиальную плавучесть.
Осуществляют собственное вращение цилиндрической инерционной массы так, что ее собственное вращение осуществляют посредством синхронного гистерезисного электродвигателя, и формируют при этом кинетический момент гироскопа.
Осуществляют собственное вращение цилиндрической инерционной массы так, что внешнюю цилиндрическую полость, закрепленную в рамке поплавка, подвешивают в подшипниках качения и осуществляют разгон ее посредством внешнего привода, кинематически связанного с цилиндрической камерой торцевыми электродвигателями, причем по мере разгона инерционной массы до рабочей частоты собственного вращения прекращают внешний механический привод и фиксируют внешнюю цилиндрическую камеру, а собственное вращение инерционной массы осуществляют посредством синхронного гистерезисного электродвигателя, и формируют при этом кинетический момент гироскопа, кинематически связанный через внешнюю зафиксированную цилиндрическую камеру и рамку поплавка с выходной осью поплавкового гироскопа. Задача решения - заливка подвеса ротора-поплавка гиромотора несмешивающимися жидкостями.
Задача решается так, что способ заполнения цилиндрического гидродинамического подвеса ротора гиромотора поплавкового гироскопа несмешивающимися жидкостями, включающий вращение инерционной массы в рамке, установленной во внутренней полости цилиндрического поплавка, отличается тем, что заполняют жидкостью зазоры между цилиндрическим поплавком-ротором и камерой так, что заливают фиксированный объем жидкости плотностью ρ1 во внутреннюю полость подвеса, устанавливают равные торцевые зазоры между поплавком-ротором и камерой его цилиндрического гидродинамического подвеса, помещают подвес с приводом в не вращающийся замкнутый объем, осуществляют горизонтальное собственное вращение цилиндрического подвеса поплавка-ротора, при этом формируют торцевые воздушные полости равных объемов в цилиндрической камере гидродинамического подвеса поплавка-ротора, заполняют замкнутый объем жидкостью плотностью ρ2, большей плотности ρ1 и не смешивающейся с ней, заполняют при этом через заливочные каналы торцевые воздушные полости цилиндрического вращающегося в жидкости плотностью ρ2 гидродинамического подвеса, останавливают вращение подвеса и герметизируют заливочный канал со стороны, свободной от внешнего привода, освобождают подвес от элементов привода, разворачивают ось собственного вращения его вертикально и герметизируют второй заливочный канал.
Устанавливают равные торцевые зазоры между поплавком-ротором и камерой его цилиндрического гидродинамического подвеса так, что устанавливают во внутренней полости поплавка-ротора в диаметральной плоскости магниты на одинаковом расстоянии от торцов, устанавливают подвес вертикально относительно системы съема сигнала об аксиальном перемещении поплавка-ротора в виде кольцевой катушки, осуществляют собственное вращение подвеса и перемещают при этом поплавок-ротор до одной из торцевых стенок камеры и определяют момент взаимодействия его с ней по отсутствию изменений сигнала с его системы съема, переворачивают подвес на 180 градусов и определяют время Т перемещения поплавка вдоль суммы торцевых зазоров, затем переворачивают подвес снова на 180 градусов и перемещают поплавок-ротор в течение времени Т/2 и тем самым устанавливают поплавок на одинаковом расстоянии от торцевых стенок цилиндрического гидродинамического подвеса ротора-поплавка.
НОВИЗНА.
Впервые предложен цилиндрический гидродинамический подвес ротора-поплавка (инерционной массы) гиромотора в поплавковом подвесе гидростатического типа (ось вращения которого является выходной осью прибора) с важнейшей особенностью, обусловленной формированием аксиальных центрирующих свойств цилиндрического гидродинамического подвеса в направлении оси собственного вращения. Данная часть решения - это развитие идеи центрирования сферического поплавка в сферическом гидродинамическом подвесе, высказанная профессором Смирновым Е.Л. в 1967 году, и распространение ее на цилиндрический гидродинамический подвес цилиндрического поплавка-ротора - носителя кинетического момента поплавкового гироскопа. При этом, как вариант решения, предложен дополнительно привод гидродинамического подвеса ротора-поплавка посредством внешних электродвигателей для ускоренного формирования гидродинамического давления, обеспечивающего радиальное и осевое центрирование ротора-поплавка в цилиндрической камере с последующим переходом на режим вращения только посредством синхронного гистерезисного электродвигателя. Этот режим дополнительно позволяет существенно сократить время "контактного разгона" ротора-поплавка в цилиндрической камере. А это, в свою очередь, уменьшает износ поверхностей подвеса и увеличивает количество пусков и остановов подвеса. Следует отметить, что здесь количество пусков и остановов подвеса несоизмеримо больше, чем в газодинамическом подвесе ротора гиромотора, ранее освоенного в промышленности. Освоение же гидродинамического подвеса, несколько "задержалось" в связи со сложностью решения известных уравнений движения жидкости Навье-Стокса. Впервые результаты, показывающие возможность создания перегрузочного варианта сферического гидродинамического подвеса, докладывались лишь в конце 70-х. Впервые использование предложенного решения позволит (без применения дорогих газодинамических опор ротора гиромотора) получить случайную составляющую скорости дрейфа на уровне 0,005-0,001 град/час.
НОВИЗНА.
Применительно к представленному способу подвеса ротора-поплавка гиромотора гидродинамического типа впервые предложен способ заполнения цилиндрического гидродинамического подвеса жидкостью плотностью ρ1 в радиальном его зазоре и плотностью ρ2, большей ρ1, в торцевых его зазорах подвеса так, чтобы жидкость большей плотности располагалась на оси его вращения.
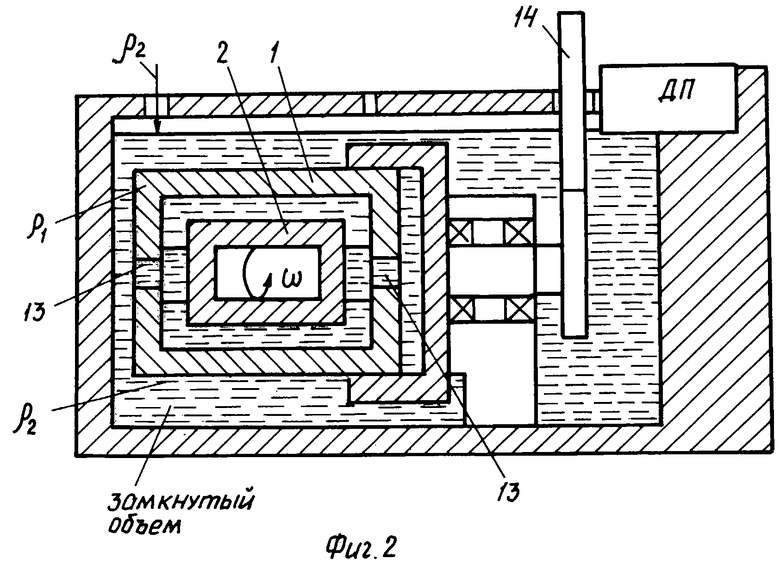
Фиг.1. Конструктивная схема гидродинамического подвеса ротора-поплавка, являющегося инерционной массой 2 в цилиндрическом поплавке - чувствительном элементе 2* поплавкового гироскопа. Здесь обозначено: 1 - цилиндрический корпус гироскопа, 1* - цилиндрическая камера гидродинамического ротора-поплавка 2, внутренняя полость 3 ротора-поплавка, где размещают кольцевой магнит (в случае необходимости) для реализации съема сигнала при заполнении жидкостью гидродинамического подвеса ротора-поплавка 2, 4 - залитый компаундом статор гистерезисного двигателя привода ротора-поплавка 2; 5 - гистерезисное кольцо; 6 - торцевые электродвигатели привода камеры 1 гидродинамического подвеса ротора-поплавка 2 (для второго варианта ускоренного разгона подвеса ротора-поплавка), 7 - механическая кинематическая "связь" электродвигателя 6 и цилиндрической камеры 1 (цилиндрические вставки в отверстиях камеры), 8 - шариковые подшипники механического внешнего привода камеры 1 разгона подвеса (помечены пунктиром как не использующиеся в первом варианте исполнения технического решения); ρ1, ρ2, ρ3 - плотности жидкости радиального зазора, торцевого зазора гидродинамического и гидростатического подвесов чувствительного элемента гироскопа, соответственно.
Фиг.2. Функциональная схема заполнения гидродинамического подвеса ротора-поплавка 2 жидкостью. Замкнутый объем заливают жидкостью плотностью ρ2 через отверстия в верхней его части. А в торцевые зазоры подвеса, вращающегося посредством двигателя привода ДП и редуктора 14, жидкость заливается по закону сообщающихся сосудов через отверстия 13, соосные с осью собственного вращения гидродинамического подвеса.
"Способ гидродинамического подвеса ротора гиромотора в чувствительном элементе гидростатического типа поплавкового гироскопа" реализуется следующим образом /фиг.1/.
Выполняют инерционную массу - поплавок-ротор в виде полого цилиндра и помещают во внутреннюю полость цилиндрической камеры.
Устанавливают во внутренней полости цилиндрического поплавка поплавкового подвеса гидростатического типа цилиндрическую камеру с помещенным в нем цилиндрическим поплавком в рамке, закрепленной во внутренней полости цилиндрического поплавка 2* поплавкового подвеса.
Зазор между цилиндрической инерционной массой ротором-поплавком 2 и цилиндрической камерой 1 заполняют несмешивающимися жидкостями плотности ρ1 и ρ2, причем в торцевых зазорах размещают одинаковые объемы жидкости плотности ρ2, большей плотности ρ1 (подробно способ заполнения зазоров гидродинамического подвеса жидкостью с различными плотностями рассмотрен ниже, т.к. он не очевиден).
Осуществляют собственное вращение цилиндрической инерционной массы 2 и ее радиальное и осевое центрирование, а величину инерционной массы предварительно выбирают близкой массе вытесненной ею жидкости, но обеспечивают при этом положительную аксиальную плавучесть.
Собственное вращение инерционной массы реализуют посредством синхронного гистерезисного электродвигателя и формируют при этом кинетический момент поплавкового гироскопа (это первый "классический" вариант исполнения привода ротора-поплавка гидродинамического подвеса с неподвижной внешней камерой без дополнительного внешнего привода).
Особенность исполнения гидродинамического подвеса ротора-поплавка 2 с ускоренным разгоном состоит в следующем. Внешнюю цилиндрическую полость 1 с поплавком ротором 2, закрепленную в рамке поплавка, подвешивают в подшипниках качения 8 и осуществляют разгон ее посредством внешнего привода, кинематически связанного 7 с цилиндрической камерой торцевыми электродвигателями 6. По мере разгона инерционной массы 2 до рабочей частоты собственного вращения прекращают внешний механический привод и фиксируют внешнюю цилиндрическую камеру 1.
Собственное вращение инерционной массы осуществляют посредством синхронного гистерезисного электродвигателя 4, 5 и формируют при этом кинетический момент, кинематически связанный через внешнюю зафиксированную цилиндрическую камеру 1 и рамку поплавка 2* с выходной осью поплавкового гироскопа (это второй вариант исполнения ускоренного одновременного разгона внешней подвижной цилиндрической камеры ротора-поплавка посредством внешнего привода и гистерезисного двигателя с последующим вращением посредством только гистерезисного двигателя).
Технический результат - это повышение точности поплавкового двухстепенного интегрирующего гироскопа или поплавкового датчика угловой скорости для БИНС за счет минимизации постоянной, а самое главное случайной составляющей скорости дрейфа. Этот технический результат получен за счет следующего технического эффекта.
Предложен подвес ротора-поплавка гиромотора гидродинамического типа цилиндрической формы с осевыми центрирующими свойствами. Дополнительно предложено осуществлять разгон инерционной массы посредством комбинированного привода: гистерезисным электродвигателем, вращающим ротор-поплавок и его цилиндрическую камеру гидродинамического подвеса механическим способом посредством внешних электродвигателей.
"Способ заполнения гидродинамического подвеса ротора гиромотора поплавкового гироскопа несмешивающимися жидкостями различной плотности" реализуется следующим образом (фиг.2).
Заливают фиксированный объем жидкости плотностью ρ1 во внутреннюю полость подвеса ротора-поплавка 2.
Устанавливают равные торцевые зазоры между поплавком-ротором и камерой его цилиндрического гидродинамического подвеса. Данная операция включает в себя комплекс действий: (содержание их на фиг.3 не отражены)
- устанавливают во внутренней полости поплавка-ротора в диаметральной плоскости магниты на одинаковом расстоянии от торцов,
- устанавливают ось собственного вращения подвеса вертикально относительно системы съема сигнала об аксиальном перемещении поплавка-ротора в виде кольцевой катушки (магнит и кольцевая катушка на фиг.3 не показаны, т.к. используются для предварительного осевого центрирования поплавка),
- осуществляют собственное вращение подвеса и перемещают при этом поплавок-ротор до одной из торцевых стенок камеры и определяют момент взаимодействия его с ней по отсутствию изменений сигнала с его системы съема,
- переворачивают подвес на 180 градусов и определяют время Т перемещения поплавка вдоль суммы торцевых зазоров,
- затем снова переворачивают подвес на 180 градусов и перемещают поплавок-ротор в течение времени Т/2 и тем самым устанавливают поплавок на одинаковом расстоянии от торцевых стенок цилиндрического гидродинамического подвеса ротора-поплавка.
Помещают вращающийся подвес с приводом в не вращающийся замкнутый объем, при этом во время нахождения подвеса в нем ось собственного вращения удерживают горизонтально.
Осуществляют горизонтальное собственное вращение цилиндрического подвеса поплавка-ротора 2 в замкнутом объеме посредством двигателя привода ДП и редуктора 14, при этом формируют торцевые воздушные полости равных объемов в цилиндрической камере 1 гидродинамического подвеса поплавка-ротора.
Заполняют замкнутый объем жидкостью плотностью ρ2, большей плотности ρ1, и не смешивающейся с ней, при этом через заливочные каналы 13, соосные с осью собственного вращения, заполняют по закону сообщающихся сосудов торцевые воздушные полости цилиндрического вращающегося в жидкости плотностью ρ2 гидродинамического подвеса.
Останавливают вращение подвеса и герметизируют заливочный канал со стороны, свободной от внешнего привода в замкнутом объеме.
Освобождают подвес от элементов привода, разворачивают ось собственного вращения его вертикально и герметизируют второй заливочный канал 13.
Технический результат данного способа заливки состоит в обеспечении размещения в торцевых зазорах равных объемов жидкости плотностью ρ2, большей чем плотность жидкости ρ1, размещенной в радиальном зазоре подвеса и не смешивающейся с ней. Получается этот технический результат за счет следующего технического эффекта. Заливают предварительно радиальный зазор цилиндрического гидродинамического подвеса ротора-поплавка жидкостью меньшей плотности ρ1. Затем осуществляют осевое центрирование его и формирование при собственном горизонтальном вращении одинаковых торцевых воздушных полостей. Эти полости заполняют жидкостью плотностью ρ2, большей плотности ρ1, в не вращающемся замкнутом объеме по закону сообщающихся сосудов. Герметизируют потом поочередно заливочные каналы.
Техническое решение: "Способ гидродинамического подвеса ротора гиромотора поплавкового гироскопа", способного дополнительно оценивать ускорения в направлении оси собственного вращения.
Прототип для данного решения тот же, что и для первого из вышеописанных.
Недостаток дополнительно состоит в том, что известное решение не позволяет оценивать ускорение в направлении оси собственного вращения. Особенность первого из предложенных решений позволяет дополнить его операциями, которые дадут возможность с реализованного подвеса снимать информацию об ускорениях в направлении оси собственного вращения. Анализ предложенной схемы подвеса ротора-поплавка показывает, что она напоминает при определенных условиях поплавковый гидродинамический акселерометр - стр.8 /4/. Особенностями предложенной схемы является плавучесть ротора-поплавка, близкая к ней тральной (т.е. плотность жидкости ρ1 приблизительно равна приведенной плотности поплавка ρп), но положительной за счет наличия в торцевых частях подвеса объемов жидкости с плотностью ρ2, большей плотности ρ1. Поэтому за счет смещения поплавка в направлении оси собственного вращения цилиндрического гидродинамического подвеса и перераспределения в торцевых зазорах объемов жидкости разной плотности возникает центрирующая (ограничивающая перемещение) поплавок-ротор сила, пропорциональная смещению поплавка и разности плотностей используемых в подвесе жидкостей. Дополнительно для оценки смещения поплавка-ротора необходимо осуществить регистрацию и сформировать сигнал на выходе датчика перемещений прибора. Это предложено сделать посредством датчика перемещений индукционного или емкостного типа. При этом даже незначительное смещение ротора-поплавка практически не вызовет осевого смещения центра масс и дополнительной разбалансировки, т.к. приведенная (средняя) плотность поплавка ρп близка по величине к плотности ρ1.
Задача решения - оценка осевого ускорения в направлении кинетического момента поплавковыми измерителями угловых перемещений.
Эта задача решается так, что вращают инерционную массу в рамке, установленной во внутренней полости цилиндрического поплавка, имеет особенность такую, что инерционную массу выполняют в виде полого цилиндра и помещают его во внутреннюю полость цилиндрической камеры, которую устанавливают во внутренней полости цилиндрического поплавка подвеса гидростатического типа, зазор между цилиндрической инерционной массой - поплавком-ротором и цилиндрической камерой заполняют несмешивающимися жидкостями плотности ρ1 и ρ2, причем в торцевых зазорах размещают одинаковые объемы жидкости плотности ρ2, большей плотности ρ1, при этом осуществляют собственное вращение цилиндрической инерционной массы и ее радиальное и осевое центрирование, а величину инерционной массы выбирают близкой массе вытесненной ею жидкости, но обеспечивают при этом положительную аксиальную плавучесть, устанавливают датчик осевых перемещений ротора-поплавка, при действии ускорений в направлении оси собственного вращения смещают ротор-поплавок на фиксированную величину, формируют сигнал, ей пропорциональный, и тем самым оценивают величину ускорения в направлении оси собственного вращения ротора-поплавка. Устанавливают датчик осевых перемещений ротора-поплавка так, что закрепляют в его диаметральной полости кольцевой магнит, а на не вращающейся части подвеса - статор датчика перемещений в виде кольцевой обмотки, при действии ускорения формируют сигнал, пропорциональный смещению перемещающейся части датчика, установленной внутри ротора-поплавка, относительно его статора. Или устанавливают датчик осевых перемещений ротора-поплавка так, что устанавливают в его диаметральной серединной плоскости центральный электрод, в торцевых частях подвеса балансные электроды, включают их по мостовой схеме с постоянными одинаковыми резисторами, при этом в одну из диагоналей подают питающее датчик напряжение, а с другой при действии ускорения снимают выходной сигнал, пропорциональный осевому перемещению цилиндрического ротора.
НОВИЗНА.
Впервые предложено осуществлять съем сигнала с ротора-поплавка о величине ускорения в силу специфики принципа действия разработанного решения. В результате этого появляется возможность создания трехосной навигационной системы, измеряющей не только угловые, а и поступательные движения основания. В качестве чувствительного элемента этой системы могут быть использованы поплавковые гироскопы с представленными здесь усовершенствованиями. Традиционная тройка гироскопов и акселерометров может быть заменена поплавковыми гироскопами повышенной точности, способными оценивать ускорения в составе платформенной или бесплатформенной системы.
"Способ гидродинамического подвеса ротора гиромотора поплавкового гироскопа", способного дополнительно оценивать ускорения в направлении оси собственного вращения, реализуется следующим образом.
Данная часть технического решения является развитием первого из представленных и поэтому все операции его здесь повторяются. Особенностью его является способность оценивать ускорение в направлении оси собственного вращения. Операции, способствующие возможности измерения ускорений:
Величину инерционной массы выбирают близкой массе вытесненной ею жидкости, но обеспечивают при этом положительную аксиальную плавучесть ротора-поплавка. Данная операция и определяет возможность смещения ротора-поплавка в направлении оси собственного вращения при действии в данном направлении ускорения. Смещение поплавка приводит к перераспределению торцевых объемов жидкости. Со стороны, куда сместится поплавок, торцевой зазор уменьшается и радиус границы несмешивающихся жидкостей также увеличивается. На другом торце подвеса радиус границы несмешивающихся жидкостей уменьшается за счет перемещения части объема жидкости из той части подвеса, где радиус границы увеличился. Именно за счет перераспределения торцевых объемов возникает ограничивающая перемещение поплавка-ротора сила. При этом смещение поплавка-ротора пропорционально ускорению, его вызывающему. Регистрация смещения реализуется следующим образом.
Устанавливают датчик осевых перемещений ротора-поплавка. При этом: Закрепляют в его диаметральной полости кольцевой магнит, а на не вращающейся части подвеса - статор датчика перемещений в виде кольцевой обмотки. Магнит может состоять из двух частей, закрепленных в торцах поплавка-ротора, а обмотка - из пары катушек, размещенных соосно с вращающимся вместе с поплавком магнитом, соответственно против него.
При действии ускорения формируют сигнал, пропорциональный смещению перемещающейся части датчика, установленного внутри ротора-поплавка, относительно его статора. Этот сигнал формируется за счет изменения магнитного потокосцепления обмоток и вращающегося магнита. При действии ускорений в направлении оси собственного вращения смещают ротор-поплавок на фиксированную величину, формируют сигнал, ей пропорциональный, и тем самым оценивают величину ускорения в направлении оси собственного вращения ротора-поплавка. Так осуществляют индукционный съем сигнала с поплавка-ротора.
Емкостный съем сигнала можно сформировать так, что устанавливают в его диаметральной серединной плоскости центральный электрод, в торцевых частях подвеса балансные электроды, включают их по мостовой схеме с постоянными одинаковыми резисторами, при этом в одну из диагоналей подают питающее датчик напряжение, а с другой при действии ускорения снимают выходной сигнал, пропорциональный осевому перемещению цилиндрического ротора. Здесь за счет изменения емкостных сопротивлений в торцевых частях подвеса ротора-поплавка будет меняться баланс сопротивлений при смещении поплавка и в связи с этим будет получен сигнал, пропорциональный его смещению и ускорению. При действии ускорений в направлении оси собственного вращения ротора-поплавка смещают его на фиксированную малую величину, формируют сигнал, ей пропорциональный, и тем самым измеряют величину осевого ускорения.
Технический результат данной части решения дополнительно по отношению к решению, развитием которого оно является, это возможность измерения (оценки) ускорения в направлении оси собственного вращения и создание таким образом чувствительного элемента - поплавкового гироскопа, способного измерять кроме традиционных угловых перемещений основания еще и ускорение в направлении вектора кинетического момента. Тройка таких приборов может стать основой платформенной или бесплатформенной навигационной системы, способной измерять ускорения посредством поплавковых гироскопов (т.е. без использования акселерометров). В результате можно ожидать снижения стоимости системы и одновременно повышения ее точности измерения угловых перемещений. Этот технический результат получается за счет следующего технического эффекта. Дополнительно к выделенному в первом решении эффекту здесь устанавливают датчик перемещений и при действии осевых ускорений смещают ротор-поплавок на малую фиксированную величину, формируют сигнал, ей пропорциональный, и тем самым измеряют ускорение в направлении кинетического момента гироскопа.
Изобретение предназначено для высокоточных поплавковых интегрирующих гироскопов и датчиков угловой скорости для бесплатформенных инерциальных навигационных систем. В способе подвеса ротора-поплавка гиромотора гидродинамического типа цилиндрической формы с осевыми центрирующими свойствами осуществляется разгон инерционной массы посредством комбинированного привода: гистерезисным электродвигателем, вращающим ротор-поплавок, и его цилиндрической камеры механическим способом посредством внешних электродвигателей. Способ заливки жидкостью гидродинамического подвеса ротора-поплавка заключается в том, что заливают предварительно радиальный зазор цилиндрического гидродинамического подвеса ротора-поплавка жидкостью меньшей плотности ρ1, затем осуществляют осевое центрирование его и формирование при собственном горизонтальном вращении одинаковых торцевых воздушных полостей. Эти полости заполняют жидкостью плотностью ρ2, большей плотности ρ1, в не вращающемся замкнутом объеме по закону сообщающихся сосудов. Герметизируют поочередно заливочные каналы. Техническим результатом является уменьшение случайной составляющей скорости дрейфа. 3 с. и 5 з.п. ф-лы, 2 ил.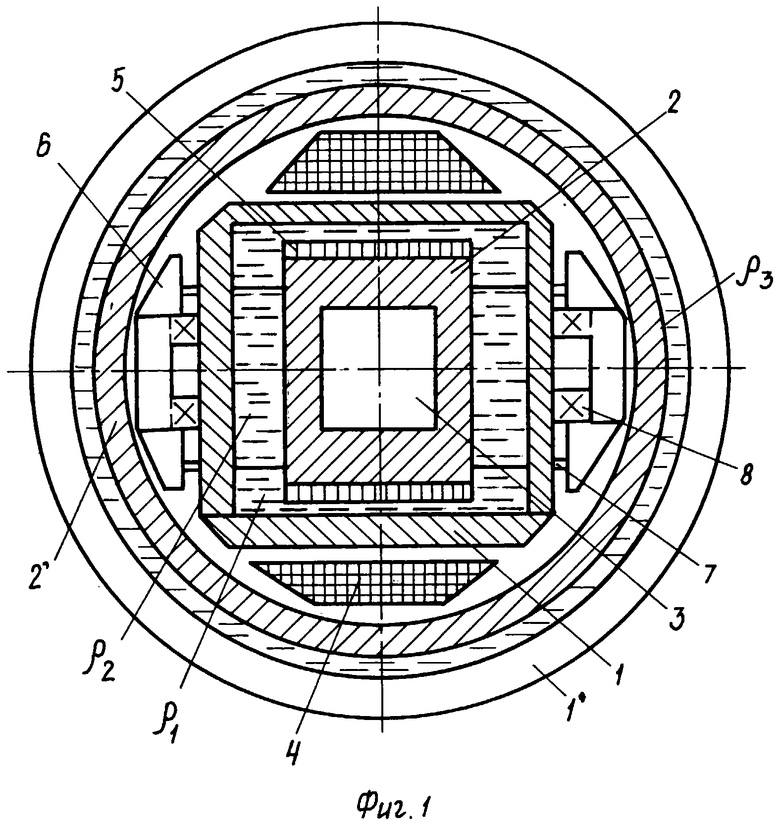
| АНДРЕЙЧЕНКО К.П | |||
| Динамика поплавковых гироскопов и акселерометров | |||
| - М.: Машиностроение, 1987, с.8 | |||
| РИГЛИ У | |||
| и др | |||
| Теория, проектирование и испытание | |||
| гироскопов | |||
| - М.: Мир, 1972, с.238, 296, 314 | |||
| ДВУХСТЕПЕННОЙ ПОПЛАВКОВЫЙ ГИРОСКОП | 2002 |
|
RU2229100C1 |
| ПРИБОР ДЛЯ ИССЛЕДОВАНИЯ ПОПЛАВКОВЫХ УЗЛОВ НАВИГАЦИОННЫХ ПРИБОРОВ | 0 |
|
SU250475A1 |
| 1972 |
|
SU414486A1 | |
| US 5245880 А, 21.09.1993 | |||
| US 4448086 A, 15.05.1984. | |||

