Изобретение относится к области навигации, в частности к устройству гироскопа.
Известны конструкции трехстепенных гироскопов с шаровым газодинамическим подвесом [А.Ю.Ишлинский. Механика гироскопических систем. Изд. АН СССР, M., 1963 г.]. Шаровый подвес в них одновременно выполняет роль опор ротора-носителя кинетического момента - и подвеса осей чувствительности.
Наиболее близким техническим решением является "Трехстепенный гироскоп" (Патент РФ №2119146 от 20.09.1998 г.).
Недостатком этого гироскопа является наличие упругих связей между ротором гироскопа и его корпусом, на котором крепится статор гиродвигателя: при появлении угла рассогласования α межу вектором кинетического момента Н и вектором момента гиродвигателя Мдв на ротор накладывается корректирующий момент М=МдвSinα, который совмещает вектор Н с вектором Мдв. Кроме того, из-за наличия угла α возникает момент тяжения между статором гиродвигателя и ротором гироскопа, уводящий ротор относительно другой оси чувствительности. Поскольку газодинамические опоры для обеспечения своей работоспособности требуют сравнительно высокого давления газовой среды, то момент, развиваемый гиродвигателем, значителен. Поэтому все существующие трехстепенные гироскопы с шаровой газодинамической опорой имеют сравнительно невысокую точность.
Для устранения этого недостатка предлагается трехстепенный гироскоп с шаровым газодинамическим подвесом, в котором вектор кинетического момента ротора и вектор момента гиродвигателя всегда остаются неподвижными относительно друг друга.
Конструкция предлагаемого гироскопа показана на чертеже.
Трехстепенный гироскоп содержит корпус 1, в котором жестко закреплена ось 2 со сферой газодинамического шарового подвеса 3, и гиромотор 4.
Гиромотор 4 состоит из двух крышек 5, неподвижно соединенных друг с другом. На крышках 5 жестко закреплены статоры 6 гиродвигателя и невращающиеся элементы (полусферы) газодинамических подшипников 7 ротора, который содержит маховик 8 и две полуопоры 9, каждая из которых содержит одну полусферу шарового газодинамического подвеса осей чувствительности гироскопа и одну полусферу скоростного газодинамического подшипника ротора. Вместо газодинамических подшипников ротора могут быть использованы шарикоподшипники, а в качестве типа гиродвигателя - магнитоэлектрический, гистерезисный или асинхронный.
На корпусе 1 по каждой из осей X, Y, Z жестко закреплены статоры датчиков моментов 10, 11, 12 и датчиков углов 13, 14, 15, а роторы этих датчиков закреплены на крышках 5 гиродвигателя. По оси Z установлены два датчика угла 13 с целью исключения влияния разворотов по оси X.
Каждый канал датчиков угла соединен с соответствующим датчиком момента через усилитель, не показанный на чертеже, отрицательной обратной связью. Питание гиродвигателя осуществляется через три токоподвода 17. Для ограничения углов поворота гиромотора 4 по осям X, Y, Z установлен упор 16. Габаритные размеры описываемого гироскопа: диаметр - 57 мм, длина - 62,5 мм.
Гироскоп работает следующим образом.
При подаче питания на статоры 6 гиродвигателя 4, ротор 8, 9 приходит во вращение, при этом гиромотор 4 под действием реактивного момента ложится на упор 16 по оси Z. При определенной скорости вращения ротор всплывает на полусферических опорах 7 (т.е. в них исчезает сухое трение), а весь гиромотор 4 взвешивается на шаровом газодинамическом подвесе 3. При включении отрицательной обратной связи по осям X, Y, Z сигналы датчиков углов обнулятся, при этом токи в соответствующих датчиках момента будут пропорциональны: по осям X, Y моментам остаточных дисбалансов по осям X, Y соответственно, по оси Z - моменту на оси гиродвигателя. При разворотах корпуса 1 относительно осей X, Y ротор гироскопа 8, 9, а следовательно, и гиромотор 4, который связан с ним подшипниками, имеющими большую угловую жесткость, и практически нулевую угловую жесткость в шаровом подвесе 3, останется неподвижным в инерциальном пространстве; в датчиках угла по осям X, Y появятся сигналы рассогласования, пропорциональные углам разворота корпуса 1 вокруг соответствующих осей. Изменения токов в датчиках моментов будут пропорциональны углам разворота корпуса 1 в инерциальном пространстве.
Заявленное техническое решение по сравнению с прототипом дает возможность существенно увеличить точность трехстепенных гироскопов с шаровым газодинамическим подвесом.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОСКОП | 2010 |
|
RU2446382C1 |
| ГИРОСКОП | 2019 |
|
RU2728733C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2011 |
|
RU2460040C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВЫХ СКОРОСТЕЙ ПОДВИЖНОГО ОБЪЕКТА С ПОМОЩЬЮ ТРЕХСТЕПЕННОГО ГИРОСКОПА С ЭЛЕКТРИЧЕСКОЙ ПРУЖИНОЙ | 1993 |
|
RU2111455C1 |
| ГИРОСКОП (ВАРИАНТЫ) | 2005 |
|
RU2308680C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| ГИРОМОТОР ШАРОВОГО ГИРОСКОПА | 2002 |
|
RU2231756C1 |
| Двухканальный датчик угловой скорости | 2019 |
|
RU2725880C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ С УСКОРЕНИЕМ АППАРАТА С ПОМОЩЬЮ ГИРОВЕРТИКАЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1998 |
|
RU2138017C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ДВУХСТЕПЕННОГО ПОПЛАВКОВОГО ГИРОСКОПА С ГАЗОДИНАМИЧЕСКИМ ПОДВЕСОМ РОТОРА ГИРОМОТОРА | 2014 |
|
RU2570223C1 |
Изобретение относится к области навигации, в частности к гироскопам. Сущность изобретения: ротор гироскопа конструктивно связан с элементами гиродвигателя с помощью скоростных подшипников, а весь гиромотор взвешен на шаровом подвесе, сфера которого жестко связана с корпусом гироскопа и вектор кинетического момента ротора и вектор момента гиродвигателя всегда остаются неподвижными друг относительно друга, что минимизирует появление вредных моментов и значительно повышает точность прибора. 1 ил.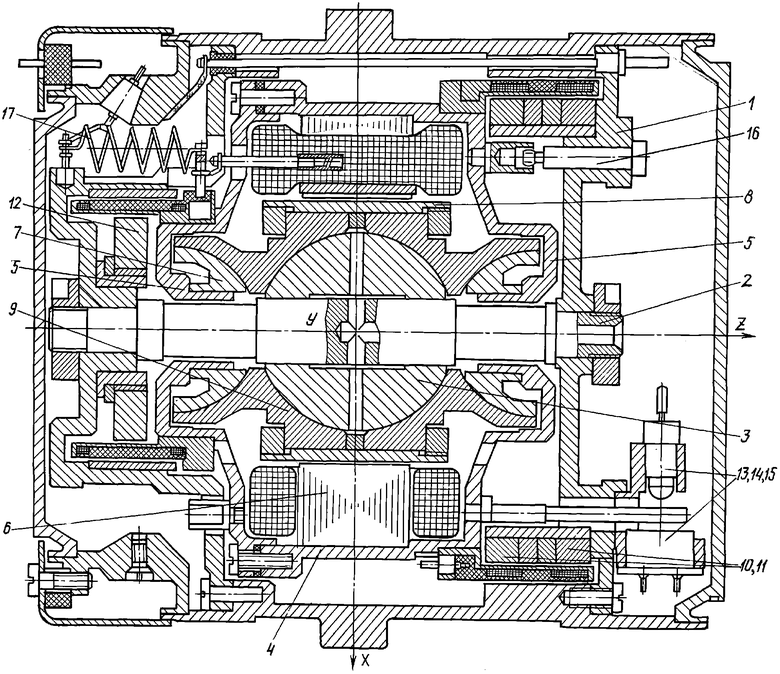
Трехстепенный гироскоп с шаровым газодинамическим подвесом, содержащий корпус, в котором жестко закреплена ось со сферой шарового газодинамического подвеса, гиромотор, датчики угла и момента, при этом гиромотор состоит из ротора, двух крышек, неподвижно соединенных друг с другом, на которых жестко закреплены статоры гиродвигателя и невращающиеся полусферы газодинамических подшипников, отличающийся тем, что ротор содержит маховик и две полуопоры, каждая из которых содержит одну полусферу шарового газодинамического подвеса осей чувствительности гироскопа и одну полусферу скоростного газодинамического подшипника ротора.
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1996 |
|
RU2119146C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| ГОРЕНШТЕЙН И.А | |||
| и др., Инерциальные навигационные системы, М., Машиностроение, 1970, с.177-178 | |||
| US 3522737 А, 04.08.1970 | |||
| Рама транспортного средства | 1983 |
|
SU1141039A1 |
| US 3446082 А, 27.05.1969. | |||

