Изобретение относится к устройствам ударного действия, в частности к отбойным молотам, молоткам, перфораторам и может быть использовано в машиностроении, строительстве, горном деле и других отраслях промышленности для обработки деталей пластическим деформированием импульсными нагрузками, придания формы обрабатываемому объекту, разрушения и преобразования горных пород и искусственных материалов, создания импульсного механического воздействия на материалы и среды.
Наиболее близким к заявляемому изобретению является гидравлическое ударное устройство, содержащее корпус, рабочий инструмент, цилиндр и боек, которые образуют камеры рабочего и обратного ходов, а также тормозную камеру, гидропневмоаккумулятор давления в напорной магистрали, распределитель, выполненный в виде гильзы и вращающегося золотника с турбиной в турбинной камере, сообщающий посредством окон и каналов камеру рабочего хода поочередно с напорной и сливной магистралями, а камеру обратного хода - постоянно с напорной магистралью, регулятор потока, задающий по состоянию бойка подачу рабочей жидкости на турбину золотника, выполненный в виде игольчатого дросселя с поршнем (патент РФ №2361996 МПК E21B 1/26 от 2009). Недостатком устройства является невозможность регулирования в автоматическом режиме частоты и энергии ударов по заранее заданному закону, а также наличие утечек по сопрягаемым поверхностям боек-корпус.
Задача, на решение которой направлено изобретение, состоит в расширении технологических возможностей устройства и рациональном использовании приводной мощности путем осуществления автоматического регулирования частоты и энергии ударов в зависимости от заданных параметров и режимов работы, создание импульсных нагрузок по заданному закону, исключения утечек по сопрягаемым поверхностям боек-корпус.
Техническая задача достигается тем, что устройство ударного действия содержит рабочий инструмент, корпус и боек, которые образуют камеры рабочего и обратного ходов, тормозную камеру, гидропневмоаккумулятор давления в напорной магистрали, распределитель, выполненный в виде гильзы и вращающегося золотника, сообщающий посредством окон и каналов одну из камер поочередно с напорной и сливной магистралями, и, согласно изобретению, снабжено шаговым двигателем, приводящим во вращение золотник, датчиками перемещения, отслеживающими положение бойка, и поворота золотника, а также электронный блок управления, формирующий на основе сигналов с датчиков по заданной программе, определяющей режим работы устройства, управляющее воздействие на шаговый двигатель для поворота золотника.
Технический результат достигается использованием датчиков перемещения бойка и угла поворота золотника, шагового двигателя и электронного блока управления, что позволяет автоматически регулировать частоту и энергию ударов, задавать их законы изменения, улучшить уплотнение в сопряжении боек-корпус. Необходимая энергия и частота ударов достигается путем поворота золотника распределителя на заданный угол за определенное время в различные такты рабочего цикла.
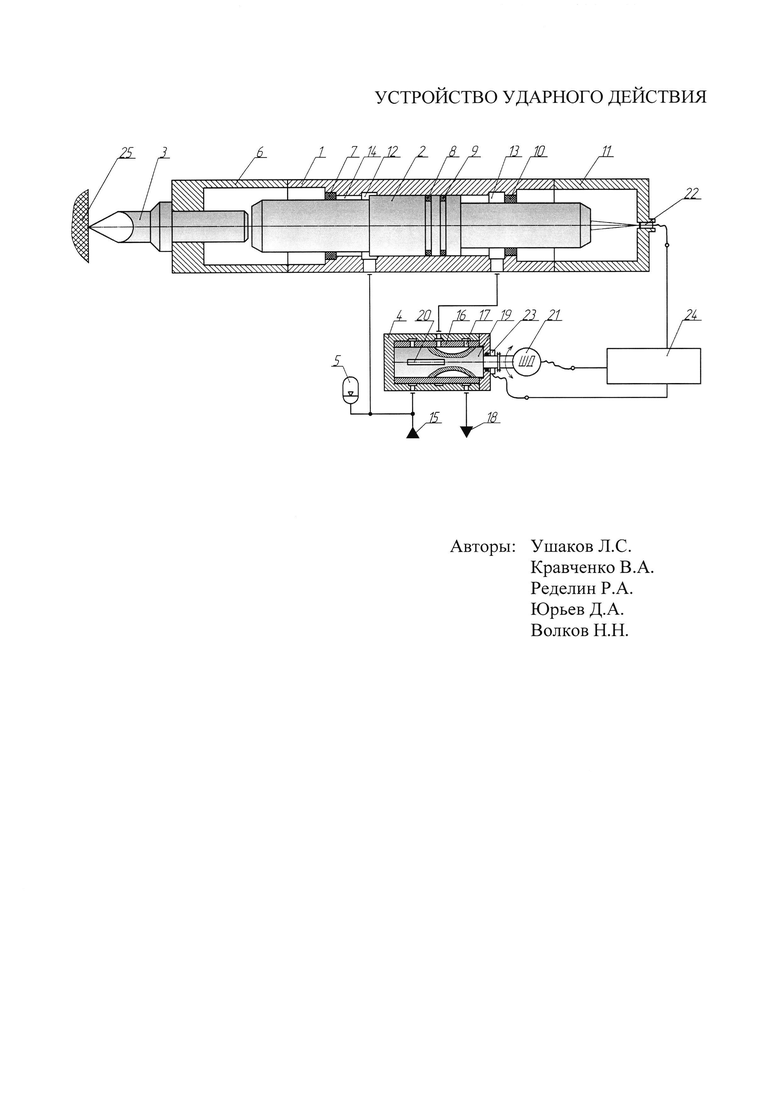
Сущность изобретения поясняется чертежом, на котором изображена схема устройства ударного действия.
Устройство содержит корпус 1, в котором установлены трехступенчатый боек 2, рабочий инструмент 3, распределитель 4, гидропневмоаккумулятор 5, направляющую 6 рабочего инструмента, уплотнения 7-10, заднюю крышку 11.
Корпус 1 и боек 2 образуют камеры обратного 12 и рабочего 13 хода. Между камерой 12 обратного хода и уплотнением 7 имеется тормозная камера 14, предназначенная для торможения бойка 3, диаметр которой на величину расчетного зазора больше наибольшего диаметра бойка 3.
Камера 12 обратного хода постоянно сообщена с напорной магистралью 15 и гидропневмоаккумулятором 5.
Распределитель 4 содержит неподвижную гильзу 16 с рядом окон 17, сообщающихся с напорной 15 и сливной 18 магистралями, а также с камерой рабочего хода 13, и вращающийся золотник 19, на цилиндрической поверхности которого по образующим выполнены каналы 20. Каналы 20 расположены по окружности таким образом, что при вращении золотника 19 происходит поочередное сообщение камеры 13 рабочего хода с напорной 15 или сливной 18 магистралями. Вращение золотника 19 происходит посредством шагового двигателя 21, с которым он механически соединен.
Для получения информации о положении бойка 2 и золотника 19 в задней крышке 11 установлен датчик 22 перемещения бойка 2, а на приводном валу золотника 19 - датчик 23 угла поворота. Информация с датчиков 22 и 23 поступает на электронный блок управления 24, в котором формируется управляющий сигнал. На чертеже указан обрабатываемый объект 25.
Устройство работает следующим образом.
При подаче, рабочей жидкости по напорной магистрали 15 производится зарядка аккумулятора 5 и заполнение жидкостью камеры 12 обратного хода.
Если торец бойка 2 находится в камере 12 обратного хода, то при сообщении посредством каналов 20 на золотнике 19 камеры 13 рабочего хода со сливной магистралью 18 происходит обратный ход бойка 2 (по чертежу вправо).
Если боек 2 находится в тормозной камере 14 и перекрывает доступ жидкости из камеры 12 обратного хода на торцовую площадку, то обратный ход бойка 2 не происходит, пока корпус 1 устройства не будет перемещен статическим усилием (по чертежу влево). После смещения корпуса 1 под действием статической силы в направлении обрабатываемого объекта 25 рабочий инструмент 3, упирающийся в объект 25, вдвигаясь по направляющей 6, смещает боек 2 вправо и его торец выводится из тормозной камеры 14 в камеру 12 обратного хода.
Дальнейшее перемещение бойка 2 вправо осуществляется силой давления жидкости, поступающей в камеру обратного хода 12 из напорной магистрали 15, при этом камера 13 рабочего хода сообщается каналами 20 золотника 19 со сливной магистралью 18 с низким давлением. Осуществляется обратный ход, в период которого происходит вытеснение жидкости, заполнившей камеру 13 рабочего хода при предшествующем рабочем цикле, в сливную магистраль 18. Одновременно заряжается гидропневмоаккумулятор 5.
При повороте золотника 19 на заданный угол следующий паз 20 на его поверхности сообщает камеру 13 рабочего хода с напорной магистралью 15. Теперь камеры обратного хода 12 и рабочего хода 13 сообщаются одновременно с напорной магистралью 15, но площадь камеры 13 рабочего хода больше, поэтому результирующая сила, действующая с ее стороны, перемещает боек 2 в направлении рабочего инструмента 3. Осуществляется рабочий ход, во время которого боек 2 перемещается с ускорением в направлении рабочего инструмента 3 и при завершении рабочего хода наносит удар по инструменту 3 с заданной энергией. В период рабочего хода жидкость из камеры 12 обратного хода переливается через распределитель 4 в камеру 13 рабочего хода. Гидропневмоаккумулятор 5 разряжается. Золотник 19 также может быть повернут на такой угол, что канал 20 на его поверхности открывается не полностью, тем самым дросселируя жидкость и, соответственно, вызывая задержку изменения давления.
Алгоритм работы электронного блока управления 24 следующий.
В электронный блок управления 24 от датчика 22 перемещения бойка 2 поступает информация о текущем положении бойка 2 в соответствующий момент времени, для чего имеется программный таймер. Электронный блок управления 24 на основе полученной информации выполняет следующее:
а) рассчитывает перемещение бойка 2 во времени x(t).
б) дифференцирует перемещение бойка 2 по времени и рассчитывает скорость v перемещения бойка 2 на основе зависимости
v=dx(t)/dt.
в) дифференцирует скорость v бойка 2 по времени и рассчитывает ускорение бойка 2 на основе зависимости
а=dv/dt.
г) на основе значений скорости рассчитывает энергию Аб, накапливаемую бойком в процессе работы в соответствующий момент времени на протяжении всего хода по зависимости
Aб=0,5⋅mб⋅v2,
где mб - масса бойка;
д) на основе значений ускорения рассчитывает ударную силу бойка F по зависимости F=mб⋅a.
е) частоту ударов n, по зависимости
n=1/Т,
где Т - время цикла, определяемое электронным блоком управления 24;
ж) ударную мощность Nуд по зависимости:
Nуд=А⋅n,
где А - энергия бойка в момент удара.
Момент удара определяется по положению бойка 2 и резкого снижения его скорости или изменению направления вектора скорости.
Электронный блок управления 24 позволяет задавать необходимую энергию А и частоту ударов n в широких пределах (энергия может изменяться
в диапазоне от 0 до 0,5⋅mб⋅vдоп2, а частота от 0 до значения, зависящего от параметров привода).
Значение заданной энергии реализуется посредством разгона бойка 2 до необходимой скорости и поддержания ее до момента удара. Поддержание необходимой скорости осуществляется на основе программно реализованного алгоритма ПИД-регулирования.
Необходимое значение частоты ударов т реализуется посредством смещения бойка 2 на величину разгона L, значение которого может быть получено одним из способов:
а) по зависимости:
L=vpx/[n⋅(1+1/k)],
где k - коэффициент асимметрии цикла, зависящий от конструктивных параметров устройства ударного действия;
vрх=vдоп/2 - средняя скорость бойка 2 при рабочем ходе.
vдоп _ допустимая скорость бойка 2.
б) выбираться на основе карты экспериментальных данных, загруженных в электронный блок управления 24, для более точного задания частоты и энергии ударов (например, при использовании устройства в точном технологическом процессе).
Масса, допустимая скорость бойка, коэффициент асимметрии цикла k, а также другие конструктивные параметры заносятся в память электронного блока управления 24 до начала работы.
Электронный блок управления 24 на основе расчетных значений подает управляющий сигнал на шаговый двигатель 21, который реализуется на основе широтно-импульсной модуляции (ШИМ), что позволяет значительно повысить точность управления.
Датчик угла поворота 23 подает на электронный блок управления 24 сигнал о положении золотника 19 в момент запуска системы. Он также может использоваться для последующей корректировки угла поворота (например, при возможном сбое управляющего сигнала), а также контроля динамических нагрузок на золотнике 19. В качестве датчика угла поворота 23 может использоваться, например, абсолютный энкодер, или другой подходящий датчик.
Электронный блок управления 24 позволяет: реализовать заданное число ударов с заданной энергией на основе программного счетчика циклов; реализовать любой закон изменения энергии и частоты ударов в процессе работы; реализовать как циклический, так и ациклический рабочий цикл; осуществлять торможение бойка до входа его в тормозную камеру, тем самым снижая динамические эффекты; производить запись в память данных о параметрах работы большого числа циклов; получить экспериментальные данные работы в определенных условиях и использовать их в дальнейшем в качестве эталонных (например, подобрать оптимальные параметры при разрушении определенного материала и запомнить их в памяти для последующего использования).
Возможно несколько режимов работы устройства в зависимости от управляющего воздействия.
1. Золотник 19 вращается с постоянной угловой скоростью. В этом случае камера 13 рабочего хода попеременно сообщается то с напорной 15, то со сливной 18 магистралями. Частота и энергия ударов постоянные.
2. Золотник 19 вращается с переменной угловой скоростью. Частота и энергия ударов изменяются в зависимости от заданного закона и необходимых параметров импульсного воздействия в процессе работы.
3. Золотник 19 совершает реверсивные повороты. Частота и энергия ударов переменные. Данный режим может использоваться для осуществления ударов с небольшой энергией и повышенной частотой, а также дополнительного принудительного торможения бойка 2 для снижения динамических нагрузок.
4. Золотник 19 дросселирует жидкость, обеспечивая тем самым торможение бойка 2.
Использование датчиков перемещения 22 бойка 2 и угла поворота 23 золотника 19, шагового двигателя 21 и электронного блока управления 24 позволяет автоматически регулировать частоту и энергию ударов, задавать их законы изменения, улучшить уплотнение в сопряжении боек-корпус, что ведет к рациональному использованию подводимой мощности, увеличению коэффициента полезного действия и повышению эффективности работы.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2008 |
|
RU2361996C1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2010 |
|
RU2456424C1 |
| Устройство для разрушения мерзлых грунтов | 1981 |
|
SU981523A1 |
| ГИДРОУДАРНОЕ УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ДЕТАЛЕЙ ПОВЕРХНОСТНЫМ ПЛАСТИЧЕСКИМ ДЕФОРМИРОВАНИЕМ | 1995 |
|
RU2090342C1 |
| Гидравлическое устройство ударного действия | 1977 |
|
SU699167A1 |
| Гидропневматическое устройство ударного действия | 1990 |
|
SU1776783A1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2009 |
|
RU2412324C1 |
| МНОГОСТЕРЖНЕВОЕ УСТРОЙСТВО ДЛЯ УПРОЧНЕНИЯ ПОВЕРХНОСТНЫМ ПЛАСТИЧЕСКИМ ДЕФОРМИРОВАНИЕМ | 2002 |
|
RU2219042C1 |
| Гидропневматическое ударное устройство | 1981 |
|
SU962458A1 |
| Ударное устройство для разрушения горных пород | 1983 |
|
SU1141190A1 |
Изобретение относится к устройствам ударного действия, в частности к отбойным молотам, молоткам, перфораторам, и может быть использовано в машиностроении, строительстве, горном деле и других отраслях промышленности. Устройство ударного действия содержит рабочий инструмент, корпус и боек, которые образуют камеры рабочего и обратного ходов, тормозную камеру, гидропневмоаккумулятор давления в напорной магистрали, распределитель, выполненный в виде гильзы и вращающегося золотника, сообщающий посредством окон и каналов одну из камер поочередно с напорной и сливной магистралями, шаговым двигателем, приводящим во вращение золотник, датчиками перемещения, отслеживающими положение бойка, и поворота золотника, а также электронный блок управления, формирующий на основе сигналов с датчиков по заданной программе, определяющей режим работы устройства, управляющее воздействие на шаговый двигатель для поворота золотника. Обеспечивается расширение технологических возможностей устройства и рациональное использование приводной мощности путем осуществления автоматического регулирования частоты и энергии ударов в зависимости от заданных параметров и режимов работы, создание импульсных нагрузок по заданному закону, исключения утечек по сопрягаемым поверхностям боек-корпус. 1 ил.
Устройство ударного действия, содержащее рабочий инструмент, корпус и боек, которые образуют камеру рабочего хода и камеру обратного хода, тормозную камеру, гидропневмоаккумулятор давления в напорной магистрали, распределитель, выполненный в виде гильзы и вращающегося золотника, сообщающий посредством окон и каналов одну из камер поочередно с напорной и сливной магистралями, отличающееся тем, что оно снабжено шаговым двигателем, механически соединенным с золотником, датчиками перемещения бойка и поворота золотника, электрически связанными с электронным блоком управления.
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УДАРНОГО ДЕЙСТВИЯ | 2008 |
|
RU2361996C1 |
| УДАРНОЕ УСТРОЙСТВО (ВАРИАНТЫ), БЛОК УПРАВЛЕНИЯ УДАРНЫМ УСТРОЙСТВОМ И СПОСОБ УПРАВЛЕНИЯ УДАРНЫМ УСТРОЙСТВОМ | 2005 |
|
RU2390404C2 |
| Смывной бачок к унитазу | 1950 |
|
SU93095A1 |
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1979 |
|
SU863123A1 |
| СПОСОБ УПРАВЛЯЕМОГО БУРЕНИЯ ПРИ ПОМОЩИ БУРИЛЬНОГО МОЛОТКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2223171C2 |
| УДАРНОЕ УСТРОЙСТВО | 2006 |
|
RU2386527C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАБОЧИМ ЦИКЛОМ УДАРНОЙ МАШИНЫ ПРИ ПОМОЩИ ДАВЛЕНИЯ (ВАРИАНТЫ) | 2012 |
|
RU2510325C2 |
| US 5174387 A1, 29.12.1992 | |||
| US 6318478 B1, 20.11.2001. | |||

