(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ КОВОЧНЫМ МОЛОТОМ И МЕХАНИЗМОМ ОРИЕНТАЦИИ ПОКОВКИ
1
Изобретение относится к обработ ке металлов давлением и может быть использовано для ковки длинномерных поковок типа осей, валов, штоков в автоматическом в полуавтоматическом режимах.
Известно устройство для управления ковочным молотом, содержащее состоящий из рабочей и установочных ступеней цилиндр управления, кинематически связанный с распределительным золотником рабочего цилиндра молота и падающими частями, пневмораспределители рабочей ступени, соединенные с ее полостями через регулируемые дроссели, пневмораспределители установочных ступеней, датчики контроля положений падающих частей молота - исходного, конечного, на весу, ограничения, функциональные блоки приема команд, автоматического режима, единичного и многократного реверса, исходной готовности, ори ентации на весу и ограничение.
прижима, генератор частоты с задат (Чиком частоты ударов и пepeключaтeлe задатчик режимов, преобразователи сигналов датчиков контроля положении падающих частей молота и тиристорные преобразователи электромагнитов пиевмораспределителей fI
Однако для известного устройства характерны его ограниченные технологические возможности, что обусловле1вно невозможностью совместного управления молотом и механизмом ориентации поковки.
Цель изобретения - расширение его
.технологических возможностей.
15
Поставленная цель достигается тем, что устройство для управления ковочным молотом, содержащее состоясшй из рабочей и установочных ступеней цилинд. управления, шток которого кинеX
,матически связан с распределительным
золотником рабочего цилиндра молота и падакнцими частями, пневмораспреде|лители рабочей ступени, соединенные
I с ее полостями через регулируемые дроссели, пневмораспределители установочных ступеней, датчики контроля положений падающих частей молота исходного, конечного, на весу, ограничения, функциональные блоки приема команд, автоматического режима, единичного и многократного реверса, исходной готовности, ориентации на весу и ограничения, прижима, генератор частоты с задатчиком частоты ударов и переключателем, задатчик режимов преобразователи сигналов датчиков контроля положений падающих частей молота и тиристорные преобразователи электромагнитов пневмораспределителей, снабжено блоком ударной готовности, блоком команды послеударного перемещения, блоком команды послеударного вращения, блоком команды шлихтовочного перемещения и вращения, задатчиком старта шлихтовочного перемещения, датчиком старта шлихтовочного вращения, задатчиком направления перемещения, задатчиком направления вращения, блоками послеударного отсчета перемещения и послеударного вращения, задачиками величины перемещения и угла
поворота, блоком изменения скорости перемещения с задатчиком скорости перемещения, блоком изменения скорости вращения с задатчиком скорости вращения, блоком имитации ударов с перемещением поковки с задатчиком имитации межударных интервалов, имитации ударов с вращением с задатчиком имитации межударных интервалов, устройствами включения приводов перемещения и вращения, а также элементом включения имитации ударов, при этом входы блока ударной готовности соединены с выходами преобразователей датчиков контроля положений падающих частей молота - конечного и ограничения, с выходами устройств включения приводов пер еме щения и вращения через задатчики направления перемещения и вращения, а также с элементом имитации ударов через задатчик режимов, входы блока команды послеударного перемещения соединены с блрком послеударного отсчета перемещения через задатчик направления перемещения и через задатчик режимов, с выходами преобразователей сигналов датчиков контроль lпoJlpжeний падающих частей молота исходного и на весу через выход Iблока ударной готовности,-а также с
iВЫХОДОМ блока имитации ударов с перемещением, входы блока команды послеударного вращения соединены с блоком послеударного отсчета угла поворота через задатчик направления вращения и через задатчик режимов, с выходами преобразователей сигналов датчиков контроля положений падающих частей молота - исходного, ина
весу через выход блока ударной готовности, а также с выходом блока имитации ударов с вращением, входы блока имитации ударов с перемещением соединены с устройством включения привода перемещения через выход блока ударной готовности и через задатчик режимов-, а также с задатчиком имитации межударных интервалов с перемещением, входы блока имитации ударов с вращением соединены с устройством включения привода вращения через выход блока ударной готовности и через задатчик режимов, а также с задатчиком имитации мёжударных интервалов с вращением, вход блока команды шлихтовочного перемещения и вращения соединен с, переключателем эадатчика частоты ударов через выход блоков прижима, приема команд, через входы датчиков старта шяихтовочного перемещения и вращени,я и через эадатчики направления перемещения и вращения, выход блока комацды шлихтовочного перемещения и вращения соединеи через задатчик режимов и через выход блока единичного peBejpca с приема команд, с блоками послеударного отсчета перемещения и послеударного отсчета угла поворота, с , устройством включения приводов перемещения и вращения через задатчики направления перемецеиия и вращения, выходам устройства бключеиия привода перемещения также соединены с блоком приема команд, с блоком изменения скорости, перемещения, с блоком послеударного отсчета перемещения через эадатчйк величины переме-. щения и вращения и через выход блока команды вшихтовочного перемещения
0 и вращения, выходы устройства включения привода вращения также соединены с блоком приема команд, с блоком изменения скорости врашзния, с блоком послеударного отсчета угла вращения
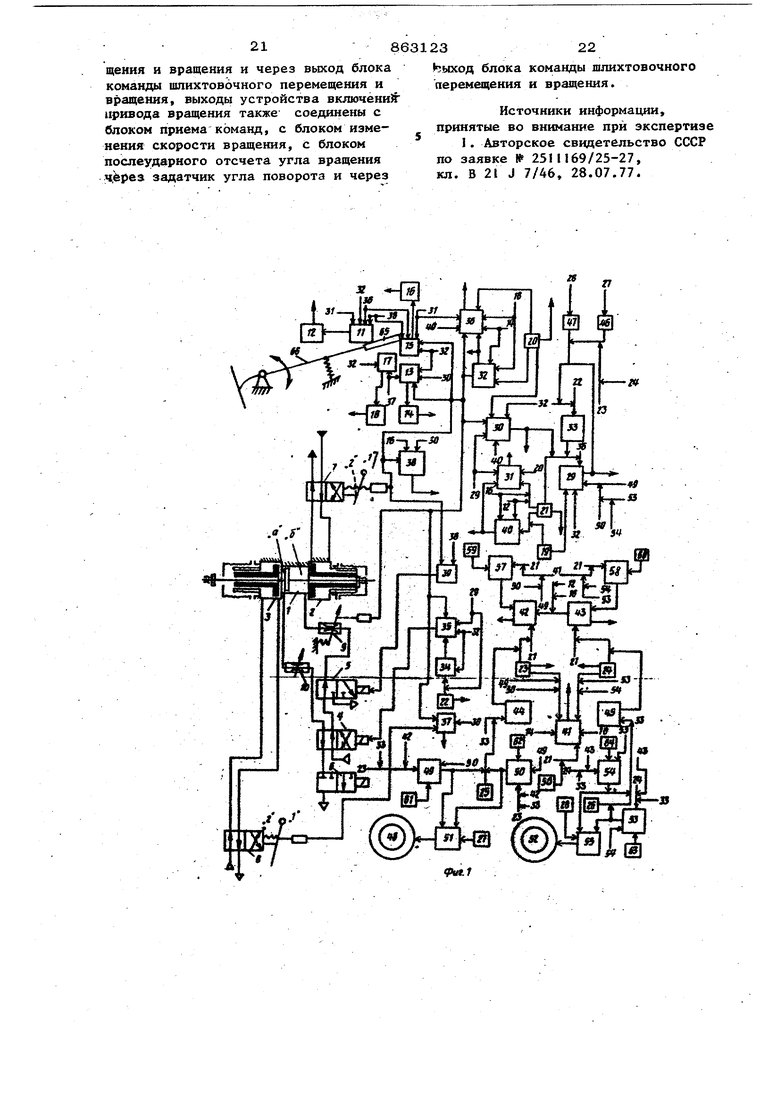
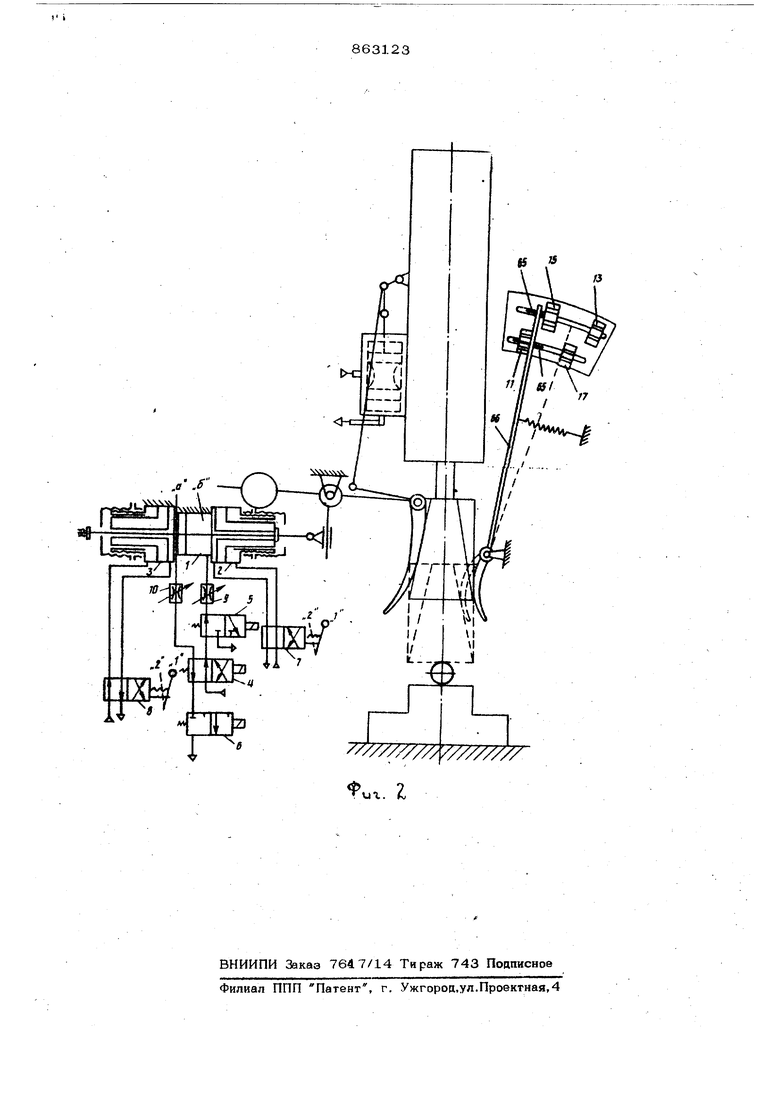
5 через задатчик угла поворота и через выход блока команды шлихто,вочного перемещения и вращения. На фиг. 1 изображена пневмоэлектрическая часть устройства; на фиг. пневматическая часть устройства во взаимосвязи с цилиндром управления, а также кинетическая связь штока ци линдра управления с распределительньи золотником молота и падающими частями. Устройство содержит цилиндр упра ления с рабочей ступенью 1 и устано вочными ступенями 2 и 3 (шток цилин ра управления кинематически соедине с золотником), пневмораспределители 4-8, дроссели управления 9 и 10, да чики контроля положений паданицкх ча тей молота - исходного i1 с преобр азователем 12, крнечного 13 с преобразователем 14, на весу 15 с пр образователем 16, ограничения 17 с преобразователем 18. Для управления устройств 1 служит пусковая кнопка 19, кнопка сброса 20, задатчик режимов 21, задатчик частоты 22 с переключателе, задатчики ориентации поковки - направления перемещения (вперед-назад) 23, направления вращения (от себя - на себя) 24, величины перемещения 25, угла поворота 26, скорости перемещения 27, скорости вращения 28. Для приема команд, выдаваемых кнопкой 19, служит блок 29, выход которого соединен со входами блока 30 автоматического режима,, блока 31 многократного реверса и через выход блока прижима 32 с блоком команды шлихтовочного перемещения и вращения 33,. генератором 34 частоты, тиристорного преобразователя 35. Устройство содержит блок 36 единичного реверса, выход ко торого соединен со входами датчиков 11 и 15, а также со входом блока 29; блок 37 готовности устройства к рабо те молота с ограничением хода падающих частей на удар; блок 38 готовности устройства к работе молота из положения паданицих частей на весу, выход которого соединен с тиристорным преобразователем 39, и блок 40 готовности устройства к работе молота из исходного положения падающих частей. Для осуществления совместной работы молота и устройства ориентации поковок служит блок.41 ударной готовности, выход которого соединен со входами блока 42 команды послеударного перемещения и блока 43 команды послеударного вращения, вход которых соединены через задатчик 36 режимов 21 и через задатчики направления перемещения 23 и направления вращения 24 с блоком 44 послеударного отсчета перемещения и блоком 45 послеударного отсчета угла поворота. Устройство также снабжено датчиком старта шлихтовочного перемещения 46 и датчиком старта шпихтовочного вращения 47, выходы которых соединены со входом блока 33 команды шлихтовочного перемещения и вращения. Для включения привода перемещения 48 предназначены устройство 49 (вперед) и устройство 50 (назад), выходы которых соединены со входом блока 51 изменения скорости перемещения. Для включения двигателя 52 (привода вращения) предназначены устройство 53 (на себя) и устройство 54 (от себя), выхода которьвс соединены со входом блока 55 изменения скорости вращения. Кнопка 56 служит для включения системы в работу в режиме имитации ударов. Дая получения эффекта имитации ударов с перемещением поковки служит блок 57, ас вращением поковки - блок 58, входа которых соединены соответственно с задатчиком 59 (в штации межударных интервалов с перемещением и с задатчиком 60 имитахщи межударных интервалов с вращением, через выход блока 41 соответственно с блоками 49 и 50 и с блоками 53 и 54, а также с задатчиком режимов 2. Выходы блоков и 58 соеди иены соответственно с блоками 42 и 43 (связь осуществляется .по линии временной задержки сигнала). Кроме того, блоки 57 и 58 снабжены устройствами, обеспечивающими удержание (определенное время), в рабочем состоянии их самих, а также блоков 42 и 43 даже тогда, когда поступает сигнал запрета на включение блоков 57 и 58 соответственно с блоков 50 (49) и устройств 54 (53) через выход блока 41. Цпя Управления приводами 48 и 52 устройства ориентацин при обычном перемещении или вращении без взаимодействия с молотом служат переключатели 61-64 вперед, назад, на себя, от себя соответственно. Устройство также содеряа1т контрольные пластины 65, установленные на плече подпружиненного рычага 66, второе плечо-которого соприкасается с копирной поверхностью падающих частей молота. Молот и устройство управления раотают следующим образом. При подаче напряжения на схему управления срабатывает электромагнит пневмораспределителя 6 и выходная магистраль пневмораспределителя 4 соединяется с атмосферой. 1. Нанесение одиночных ударов пр максимальном ходе падающих частей молота. 1.1. Органы пневмоуправления нах дятся в положении, показанном на фиг. 1 И 2. 1,2. Ключ задатчика 21 устанавли вают на режиме Одиночный удар, подключается блок 40 исходной готов ности, отключается блок 31 многокра ного реверса. Кнопкой 19 подается сигнал на вход блока 29; При отсутс вии сигнала с блока 36 на выходе блока 29 появляется сигнал, поступающий на вход блока 30 и на вход тиристорного преобразователя 35. Срабатывает электромагнит пневмораспределителя 4, Заполняется возду хом полость а. Поршень цилиндра 1 перемещается на полную величину ход Воздух из полости (J через дроссел 9,пневмораспределители 5, 4 и 6 (последний включен с начала работы) отводится в атмосферу. Шток цилиндр 1 через кинематическую связь молота (рукоятку управления, балансир, рычаг сабли, тягу, двуплечий рычаг и серьгу) перемещает золотник молота вверх. Падающие части молота нанося удар. Одновременно (при отсутствии сигналов блоков 32 и 40) на выходе блока 30 появляется сигнал. В резул тате датчик 13 подключается к систе ме. При входе пластины 65 в зазор датчика 13 сигнал с преобразователя 14 устанавливают блок 36 в рабочее состояние. Сигнал с блока 36 поступает на вход датчика 11, подключая его к системе, и на вход блока 29, устанавливая последний в нерабо чее состояние. Электромагнит пневмораспределителя 4 обесточивается. Поршень цилиндра 1 перемещается в исходное положение, золотник молота вниз, а падающие части молота вверх. При входе контрольной пластины 65 в зазор датчика 1 1 сигнал с преобразователя 12 поступает на вход блока 40, который остается в нерабочем состоянии, так как нажата кнопка 19. С блока 36 на вход блока 29 поступает сигнал запрета, поэтому повторного удара не про1ИСХОДИТ, сколько бы оператор не уде 3-8 живал нажатой кнопку 19, Для нанесения повторного удара следует отпустить кнопку 19. При этом на выходе блока 40 появляется сигнал, устанавливающий в нерабочее состояние блоки 30 и 36. Обесточиваются датчики 11 и 13. Схема подготовлена к повторному включению. Сила удара регулируется дросселем 9. Скорость возврата падающих частей молота в верхнее положение регулируется дросселем 10. 2, Автоматический режим ковки из положения падающих частей молота на весу. 2.1.Рукоятку пневмораспределителя 7 устанавливают в положение 2. При этом подается сигнал на вход блока 38, который подготавливает к включению датчик 15. Поршень цилиндра 2 перемещается до упора в регулируемый ограничитель, которым задается требуемая высота установки падакяцих частей в положении на весу Тяговьм усилием поршня цилиндра 2 через шток поршень цилиндра 1 перемещается, золотник молота также перемещается вверх, но не на полную высоту, так как поршень цилиндра 2 имеет ограниченное перемещение. Падающие части проходят требуемое расстояние и останавливаются, не дойдя до поковки. При этом к системе .подключается датчик 15, и с преобразователя 16 поступает сигнал на вход тиристорного преобразователя 39, срабатывает электромагнит пневмораспределителя 5 (перекрывается входная магистр|аль от пневмордспределителя 4). Из полости о воздух, через дроссель 9 и пневмораспределитель 5 отводится в атмосферу, поэтому порщень цилиндра 1 не сжимает воздух в иолости S, Как только падающие части достигают заданного положения на весу (датчик 15 также предварительно устанавливают в требуемое положение), пластина 65 входит в зазор датчика 15, сигнал с преобразователя 16, поступающий на вход блока 38, обесточивает электромагнит пневмораспределителя 5, так как снимается сигнал блока 38 с тиристорного преобразователя 39. Воздух заполняет полость 5. Однако порщень 1 остается в оттянутом (порщнем цилиндра 2) положении, 2.2.Задатчик 21 устанавливают в положение Автоматический режим, от системы отключается блок 40, а
свободный вход блока 29 подключается к выходу блока 30. Задатчики 23 и 24 устанавливают в соответствии с выбранными направлениями перемещения и вращения поковки. Задатчики 25 и 26 устанавливают в соответствии с требуемыми величиной перемещения и углом вращения. Устанавливают требуемую скоро.сть по шкале (шкала условно разделена на 2 части - зона малых оборотов, при которых в момент запуска не вырьшает поковку, из захватов, например от 0-10 об/мин, и зона больших оборотов от 10 об/мин до номиналного значения например до 40 об/мин задатчиками 27 и 28.
2.3. Нажимом кнопки 10 подается сигнал на вход блока 29. При отсутствии сигнала с блока 36 на выходе блока 29 появляется сигнал, поступаюащй на вход блока 30, а также на вход тиристорного преобразователя 35. На выходе блока 30 появляется сигнал, через задатчик 21 поступающий на дход блока 29 и удерживающий его в рабочем состоянии при снятии сигнала, выдаваемого кнопкой 19. При отсутствии сигнала с блока 32, подаваемого на вход тйристорного преобразователя 35, срабатывает электромагнит пневмо- распределителя 4. Заполняется воздухом полость Ь. Из полости (5 через дроссель 9 (дроссели 9 и 10 установлены так, что свободный поток направлен к полостям а и (У, а дросселируемый - к пневмораспределителям 5 и 4 соответственно), пневмораспределители 5, 4 и 6 воздух отводится в атмосферу Перемещается поршень цилиндра ,1 и соответственно золотник молота. Наносится удар по поковке. За счет наличия сигнала с блока 30 к системе подключен датчик 13. При входе пластины 65 в зазор датчика 13 сигнал с выхода преобразователя 14 поступает на вход блоков 36 и 41. Сигнал с блока 41 поступает на входы блоков 42 и. 43, однако оба блока остаются в нерабочем состоянии, так как на их выходах нет сигнала с преобразователя 16. При поступлении сигнала с преобрэзователя 14 на вход блока 36 с. выхода последнего сигнал поступает на вход блока 29, устанавливая его в нерабочее состояние. С выхода блока 29 снимается сигнал нейтрализации запуска, поступающий на вход блока 31 (последний подготовлен к установке в рабочее состояние). Так как блок 29 установлен в нерабочее
состояние, прекращается подача сигнала с тйристорного преобразователя 35 на электромагнит пневмораспределителя 4. Поршень цилиндра 1 возвращается в исходное положение - до упора в поршень цилиндра 2, который ограничивает дальнейшее перемещение поршня цилиндра I. В связи с этим падающие части при перемещении вверх доходят
только до заданного регулируемыми ограничителями цилиндра 2 положения, а не до самого верхнего. Пластина 65 входит в зазор датчика 15, с выхода преобразователя 16 поступает сигнал на входы блоков 42 и 4,3, устанавливая их в рабочее состояние. Блоки 42 и
43воздействуют на устройства 49 и 53, включающие приводы 48 и 52 устройства ориентации поковки которые перемещают ее и проворачивают. Одновременно с выходов устройств 49
и 53 подаются сигналы на вход блоков
44и 45, устанавливая их в рабочее состояние, а на вход блока 29 - сигнал запрета на установку его в рабочее состояние. Блок 29 остается в нерабочем состоянии (несмотря на то, что сигнал с блока 31 устанавливает блок 36 в нерабочее состояние и последний снимает сигнал запрета на устанрвку блока 29 в рабочее состояниеХ При достижении заданной величины перемещения и заданного угла поворота поковки прекращается подача сигнала с блоков 44 и 45 на вход блоков 42
и 43, которые снимают свое воздействие на устройства 49 и 53, и приводы 48 и 52 останавливаются. Как только устройства 49 и 53 устанавливгиотся в нерабочее состояние, снимаются
их сигналы на включение блока 29. Блок 29 устанавливается в рабочее состояние, наносится повторный удар, и вновь при возврате падающих частей в исходное положение происходит перемещение и поворот поковки на установленные расстояния .и, угол. Дпя прекращения работы следует нажать кнопку 20. Следует отметить, что удар падающими частями происходит
только тогда, когда полностью закончено последнее из двух движений поковки - перемещение при ранее закончившемся вращении поковки, шш вращение при ранее закончившемся перемещении. Если задатчик направления перемещения 23 установить в нейтральное положение, то чередование ударов происходит только при вращении поковки, Если задатчик 24 установить в
нейтральное положение, то чередовани ударов .происходит только при перемещении поковки. Величину перемещения можно увеличить, или уменьшить непосредственно в процессе ковки задатчиками 25 и 27 в любой последовательности или комбинации. Величину угла поворота в процессе ковки можно изменять задатчиками 26 и-28.
Работа в полуавтоматическом режим осуществляется аналогично описанному, однако кнопку запуска 19 следует удерживать в нажатом состоянии на протяжении требуемого цикла. Задатчик режимов 2I в этом случае должен устанавливаться в положение Полуавтоматический оежим. Для прекращения цикла достаточно снять нажимное усилие с кнопки 19.
3. Автоматический режим ковки при максимальном ходе падакицих частей молота.
3.1. Органы пневмоуправления находятся в положении, показанном на фиг. 1 и 2. Остановные органы управления устанавливают по п.2.2.
3.2. Нажатием на кнопку 19 подается сигнал на вход блока 29. С выхода блока 29 поступают сигналы на вход блока 30 и на вход тиристорного преобразователя 35. Срабатьшает электромагнит пневмораспределителя 4. Заполняется воздухом полость О цилиндра 1 , а воздух из полости (J через дроссель 9, пневмораспределитель 5,К9торый находится в нерабочем состоянии, выхлопную магистраль пневмораспределителя 4 и пневмораспределитель 6, который находится в рабочем состоянии с момента подачи напряжения, на схему, отводится в атмосферу. От штока цилиндра 1 через указанную кинематическую связь золотник перемещается вверх. Наносится удар по поковке. Блок 30, получивший сигнал от блока 29, подключает датчик 13. На выходе пластины 65 в зазор датчика 13, на выходе его преобразователя 14 появляется сигнал, поступающий на вход блока/ 36 и на вход блока 41, Сигнал 41 поступает на вход блоков 42 и 43, подготавливая их к работе. Выход сигнала с блока 36, поступающий на вход блока 29, устанавливает
его в нерабочее состояние - отключается электромагнит пневмораспределителя 4. Шток цилиндра 1 {через кинематическую связь) перемещает золотник молота в нижнее положение.
Падающие части начинают подъем. При. входе пластины 65 в зазор датчика 1I сигнал с преобразователя 12 устанавливает блоки 42 и 43 в рабочее состояние, с их выходов поступают сигналы на соответствуюир1е устройства 49 и 53, включаются приводы
48и 52. Устройство ориентирования поковки перемещает поковку (вперед-)
и проворачивает. Сигналы с устройств
49и 53 подаются также на вход блоков 44 и 45, устанавливая их в рабочее состояние, а на вход блока 29 поступает запрет на установку блока
в рабочее состояние. При достижении заданных величины перемещения и угла поворота поковки прекращается подача сигнала с блоков 44 и 45 на вход блоков 42 и 43, которые снимают свое
воздействие на устройства 49 и 53, и приводы 48 и 52 останавливаются. Так как падакицие части, достигают верхнего (исходного) положения, а пластина 65 входит в зазор датчика 11,
сигнал с преобразователя 12 (через задатчик 21) подается на вход блока 31 , родготовленный к включению сигналом з.апрета с блока 29, посколь-, ку последний находится в нерабочем состоянии. Сигнал с блока 31 устанавливает блок 36 в нерабочее состояние, последний снимает свой сиг-нал запрета на .включение блока 29 и устанавливает его в рабочее состояние (так как обесточены устройства
49 и 53, а их сигналы ..запрета на включение блока 29 сняты ). Блок 29 устанавливает в нерабочее состояние блок 31 и включает через тиристорный преобразователь 35 и злектромагнит пневмораспределитель 4. Наносится очередной удар. Для прекращения работы следует нажать кнопку 20.
Работа в полуавтоматическом режиме осуществляется аналогично описанному, однако кнопку 19 следует удерживать в нажатом состоянии.
4. .Автоматический режим ковки из положения ограничения хода падающих частей молота.
4.1. Рукоятку пневмораспределителя 8 устанавливают в положение 2. Поршень цилиндра 3 перемещается до упора в регулируемый ограничитель, которым задается требуемое ограничение удара, т.е. ограничивается перемещение бабы с учетом инерции, чем и ослабляется воздействие удара. При перемещении рукоятки пневмораспределителя 8 подается сигнал на вход блока 37, который устанавливается в рабочее состояние только при вклю чении на удар, когда дополнительно поступает сигнал с блока 30 (сигнал с блока 30 поступает в момент включения системы на удар). 4.2. Дальнейшая работа осуществл ется аналогично описанному в п. 3.2 одна;ко вместо датчика 13 и преобраг зователя 14 работают датчик 17 и преобразователь 18. При этом поршен цилиндра 1 перемещается так . .и в положении на весу, не-яа всю длину его хода. Это ограничение про изводится поршнем цилиндра 3. Работа в полуавтоматическом режи осуществляется аналогично, Задатчик 21 должен находиться в положени Полуавтоматический режим, кнопку I9 следует удерживать на протяжении всего цикла. 5.Нанесение одиночных ударов из положения ограничения хода падающих частей молота. Подготовка для работы в этом режиме осуществляется по п. 4.1, а работа .- по п. 1.2, однако вместо датчика 13 и преобразователя 14 работают датчик 17 и преобразователь 1 6.Автоматический режим ковки при установке падающих частей молота в положение на весу с последуунцим ограничением хода падающих частей молота на удар. 6.1.Подготовка к работе в этом режиме ковки производится по пп. 2. и 4.1.При этом поршни 1щлиндров 2 и 3 перемещаются только до упоров и ограничивают; ход штока цилиндра . При этом ограничение хода штока цилиндра 1 поршнями 2 и 3 не должно превышать величины возможного хода поршня цилиндра 1, иначе штоки цилин дра 1 разжаты между поршнчми цилиндров 2 и 3 и не перемещаются. 6.2.Нажимом на кнопку 19 подается сигнал на вход блока 29, выход с которого поступает, на входы блока 30 и тиристорного преобразователя 35. Сигнал с блока 30 через задатчик 21 поступает на вход блока 29, удерживая последний в рабочем состоянии (при снятии сигнала от кнопки 19). Тиристорный преобразователь 35 включает через электромагнит пневмораспределитель 4. Заполняется воздухом полость i цилиндра 1, а воздух из через пневмораспределите ПОЛОСТИ 314 ли 5, 4 и 6 отводится в атмосферу. Поршень цилиндра 1 пер емещается не на всю величину хода, так как его перемещение ограничено поршнем цилиндра 3. Падаюцще части наносят удар, однако энергия удара значительно меньше, м энергия удара при перемещен поршня цилиндра 1 на всю вейичи у хода. При входе пластины 65 в датчика 17 на его выходе появляется сигнал (датчик 13 отключен за счет наличия сигнала с блока 37), поступающий на вход преобразователя 18 и далее на вход блоков 36 и 41. На выходе блока 41 появляется сигнал, поступаюпщй на входы блоков 42 и 43, которые, однако, остаются в нерабочем состоянии, так как на их входах нет сигнала с преобразователя 16. При поступлении сигнала с преобразователя 18 на блок 36 на выходе последнего появляется сигнал, поступающий на вход блока 29, устанавливая его в нерабочее состояние. При этом с выхода блока 29 снимается сигнал запрета запуска блока 31, который подготовлен к установке в рабочее состояние. Обесточивается электромагнит пневмораспределителя 4. Поршень цилиндра I через кинематическую связь перемещает вниз золотник молота, который опускается не на максимальную величину хода, так как ход поршня цилиндра I ограничен поршнем цилиндра 2. Падающие части возвращаются в положение на весу, пластина 65 входит в зазор датчика 15. На выходе его преобразователя 16 появляется сигнал, поступающий на вход блоков 42 и 43, устанавливая их в рабочее состояние. Блоки 42 и 43 воздействуют на устройства 49 (50) и 53 (54), вклю чаются приводы 48 и 52, устройство ориентации перемещает поковку (вперед ) и поворачивает (вокруг ее оси) Одновременно с выходов устройств 49 (50)и 53 (54) подается сигнал на входы блоков 44 и 45, устанавливая их в рабочее состояние, а на вход блока 29 сигнал запрета на включение. При появлении сигнала с преобразователя 16 на входе 31 (он уже подготовлен к включению сиг- налом с блока 29) последний устанавивается в рабочее состояние и возействием своего выходного сигнала станавливает блок 36 в нерабочее состояние. В результате этого блок 36 снимает запрет на установку бло15ка 29 в рабочее состояние. Блок. 29, однако, остается в нерабочем состоянии, так как на его вход поступают сигналы запрета на включение с устройств 49 (50) и 53 (54). При достижении заданных величины перемещения и угла поворота поковки прекращается подача сигналов с блоко 44 и 45 на входы блоков 42 и 43, которые снимают свое воздействие на устройства 49 (50) и 53 (54), приводы 48 и 52 останавливаются. Как только устройства 49 (50) и 53 (54) устанавливаются в нерабочее состояние, снимаются их сигналы запрета на вклю чение блока 29. Блок 29 устанавливается в рабочее состояние, наносится удар, и вновь при возврате падающих частей в первоначальное положение (на весу) происходит перемещение и вращение поковки на установленные расстояния и угол. Для прекращения работы следует нажать кнопку 20. Работа в полуавтоматическом режи ме осуществляется аналогично. Задатчик 2 должен находиться в положении Полуавтоматический режим, кнопку 19 следует удерживать на протяжении всего цикла. 7. Режим имитации ударов. Применяется для настройки величин перемещения и угла вращения поковки Поковка, удерживаемая механизмом ори ентации, заводится на нижний боек молота. Для установки Иеобходимых величины перемещения и угла поворота поковки при заданных задатчиком 27 скорости перемещения и задатчиком 28 скорости вращения ключ задатчика режимов 21 устанавливают в положение имитация ударов, ключи задат-чиков 23 и 24 устанавливают в положение, соответствующее требуемьм направлениям перемещения и вращения поковки устройством ориентации (например, вперед и на себя). Далее следует нажать кнопку 56, при этом подается сигнал на вход блока 42. Сигнал с выхода блока 42 поступает на вход блоков 57 и 58, устанавливая их в р бочее, состояние, однако сигналы с выходов блоков 57 и 58, доздействую щие на блоки 42 и 43, поступают по истечении определенного времени, со ответствуюй4его интервалам между ударами и перемещением или вращение поковки. Указанные интервалы устан вливаются задатчиками 59 и 60. течении времени, заданного задатчиками 59 и 60, на входах блоков 42 и 43 появляются сигналы, вследствие чего с выходов блоков 42 и 43 подаются сигналы на устройство.49 (пере- . мещение вперед) и устройство 53 (вращение на себя). Одновременно с блока 49 поступает сигнал на вход блока 44, а с блока 53 на вход блока 45. Указанные сигналы устанавливают в рабочее состояние блоки 44 и 45 послеударного отсчета перемещения и вращения. При срабатывании устройств 49 и 53 включается привод 48 (перемещение вперед) и привод 52 (вращение на себя). При заданных задатчиками 27 и 28 скоростях перемещения и вращения и задатчиком 25 величины перемещения, а задатчиком 26 угла вращения, поковка перемещается на требуемое расстояние и проворачивается на заданный угол. По истечении установленного задатчиками 25 и 26 отрезка времени, соответствующего величине перемещения и углу поворота, с выходов блоков 44 и 45 на входы локов 42 и 43 поступают сигналы, устанавливающие последние в нерабочее состояние. Со входов устройств 49 и 53 снимаются сигналы запрета запуска, а с выходов последних поступают сигналы запуска,через .выход блока 41 устанавливающие блоки 57 и 58 в рабочее состояние. Имитируется межударный интервал, по истечении которого вновь поступают сигналы с выходов блоков 57 и 58, устанавливающие блоки 42 и 43 и халее устройства 49 и 53 в рабочее состо.яние. Включаются приводы 48 и 52 перемещения и вращения поковки. После того, как выбрана требуемая величина послеударного перемещения поковки и установлен необходимый угол, на который следует повернуть поковку, надо нажать кнопку сброса 20. I 8. Работа устройства при доводке (шлихтовке) поковки. 8.1. Рукоятки задатчиков 27 и 28 устанавливают в положения, соответствующие минимальным оборотам приводов 48 и 52, так как иначе датчики старта (установленные под рукоятками задатчиков 27 и 28) предотвращают запуск приводов48 и 52. Если рукоятки задатчиков 27 и 28 находятся в случайных положениях, соответствующих большим оборотам приводов |48 и 52, устройство не включается. 1тобы не вырвать поковку из захвато механизма ориентации, так как рукоятки задатчиков 27 и 28 в этом случае не воздействуют на датчики 46 и 47, которые предотвращают запуск устройства. 8.2.При отжатии рукоятки дроссе ля 9 до упора подается сигнал на тиристорный преобразователь 35. Сра батьшает электромагнит пневмораспределителя 4. Воздух из полости через дроссель 9 (установленный в этом случае на максимальное дросселирование - ручка отжата до упора), пневмораспределительЗ, находяцийся в нерабочем состоянии, выхлоп пневмораспределителя 6 отводится в атмосферу. Полость cj заполняется воздухом входную магистраль пневмораспределителя 4 и дроссель 10, установленный так, что зап нение полости d происходит свободным потоком. Шток цилиндра 1 через кинематическую связь перемещает золотник молота медленно вверх. Падающие части медленно перемещаются вниз и прижимают поковку к нижнему бойку молота. При этом наличие сигнала с блока 32 на входах блоков 30 И 36 удерживает оба блока в нерабочем состоянии, а датчики П, 13, 15 и 17 отключены от системы. 8.3.Задатчики 23 и 24 устайавли вают в положения, соответствукицие выбранным направлениям перемещения и вращения. Переключателем задатчика 22 под слючают к системе генератор 34 и устанавливают необходимую частоту доводочных (шлихтовочных)ударов. При этом подается сигнал на блок 33, предварительно подготовленный к включению сигналом с блока 32. Так как рукоятки задатчиков 27 и 28 заранее установлены в положения, соответствующие минимальным оборотгш при водов, то при поступлении сигналов с датчиков 46 и 47, с блока 32 и с контактов переключателя задатчика 22 на выходе блока 33 появляется сиг нал, прступающий на вход 29. С блока 29 подается сигнал, поступанмций на второй вход генератора 34, так как на первый его вход поступает сигнал с блока 32J на выходе генератора 34 появляются импульсы, воздействующие на вход тиристорного преобразователя 35, в результате этого электромагнит пневмораспределителя 4 периодически отключается и ;включается с интервалами, равными длительности импульсов, выдаваемыгенератором 34. С частотой вк чений и выключений пневмоп -йР делителя 4 перемещается золотник молота - пада1ощ1 г части наносят шлихтовочиые удары по поковке. Одновременно с блока 33 подается сигнал на устройства 49 и 53 и сигнал запрета на включение блоков 44 и 45. Поковка перемещается и вра1цается, а падающие части наносят удары. Скорость перемещения и вращения поковки можно увеличить иа ходу задатчиками 27 и 28. При повороте рукояток задатчиков 27 и 28 возь|ожен случай (довольно часто когда рукоятки перестают воздействовать на датчики 46 и 47. Это, однако, не означает, что блок 33 обесточивается - он удерживается в рабочем состоянии через собственный выход. Для прекращения работы достаточно нажать кнопку сброса 20 с дальнейшим отключением и переключением задатчика 22, генератора 34. 9. Прижим поковки падающими частями молота. Прижим поковки паданщими частями молота к бойку производится в соответствии СП. 8.2; Для снятия прижима достаточно нажать кнопку сброса 20. В момент прижш а падакицими частями молота поковки возможен случай, когда исчезает напряжение со схемы управления. При этом обесточиваются электромагниты пневмораспределителей 4 и 6. Однако падающие части удерживают поковку прижатой, так как выхлоп воздуха из полости Q , которая в момент прижима запапнена воздухом несмотря на то, что пиевмораспределитель 4 при отключении электроэнергии устанавхшвается в нерабочее состояние, перекрыт пневыораспределителем 6, также устанавливагацимся в нерабочее состояние при отключении электроэнергии. Поэтому поступление воздуха в полость (j не происхо дит. Предлагаемое устройство позволяет . повысить производительность процесса доводки длинномерных поковок и улучщить их качество, так как появляется возможность более точно вести ковку поковок в полуавтоматическом и автоматическом режимах, а также пшихтовочную обработку. Формула изобретения Уст)ойство для управления ковочным ом и механизмом ориентации поковкиТ ч оцержащее состоящий из рабочей и уст т хаочных ступеней цилиндр управления, штгл 1соторого кине матически связан с распределйтцицц1ым золотником рабочего цилиндра молота и падающими частями, пневмораспредел тели рабочей ступени, соединенные с ее полостями через регулируемые дроссели, пневмораспределители установочных ступеней, датчики контроля .положений падающих частей молота исходного, конечного, на весу, ог раничения , функциональные блоки при ема команд, автоматического режима, 1ничного и-многократного реверса, исходной готовнос ти ориентацич навесу и ограничения, прижима. генератор частоты с задатчиком частоты ударов и переключателем, задатчик режимов, преобразователи сигналов датчиков контроля положений падающих частей молота, тиристорные преобразователи электромагнитов пневмораспределителей, отличающееся тем, что, с целью расширения технологических возможностей оно снабжено блоком ударной готовности, блоком команды послеударного перемещения, блоком команды послеударного вращения, блоком команды щпихтовочного перемещения и вращения, задатчиками старта шлихтовочного перемещения и вращения, задатчиками направления перемещения и вращения, блоками послеударного отсчета перемещения и послеударного вращения, задатчиками величины пере мещения и угла поворота, блоком изменения скорости перемещения с задатчиком скорости перемеще- . ния, блоком изменения скорости вращения с задатчиком скорости вращения, блоком имитации ударов с перемещением поковки с задатчиком имита ufiH -межударных интервалов, блоком :Имитации ударов с вращением с задат чиком имитации межударных интервалов , устройствами включения приводо перемещения и вращения, а также эле ментом включения имитации ударов, при этом входы блока ударной готовности соединены с выходами преобраз вателей датчиков контроля положений падающих частей молота - конечного и ограничения, с выходами устройс включения приводов перемещения и вращения через задатчики направлени еремещения и вращения, а также с элементом имитации ударов через заатчик режимов, а входы блока команды послеударного перемещения соединены с блоком послеударного отсчета перемещения через задатчик направления перемещения и через задатчик режимов , с выходами преобразователей йгт1вдов датчиков контроля положений падающих .1олота - исходного и на весу через выход блока ударной готовности, а также (Г йыходом блока имитации ударов с перемещением входы блока команды послеударного вращения соединены с блоком послеударного отсчета угла поворота через задатчик. направления вращения и через задатчик режимов, с выходами преобразователей сигналов датчиков контроля положений падакицих частей молота - исходного и на весу через выход блока ударной готовности, а также с выходом блока имитации ударов с вращением, входы блока имитации ударов с перемещением соединены с устройством включения привода перемещения через выход блока ударной готовности и через задатчик режимов , а также с задатчиком имитации межударных интервалов с перемещением, входы блока имитации ударов с вращением соединены устройством включения привода вращения через выход блока ударной готовности и через задатчик режимов, а также с задатчиком имитации межударных интервалов с вращением, вход блока команды щлйхтовочного перемещения и вращения соединен с переключателем задатчика частоты ударов через выход блоком прижима, приема команд, через входы датчиков старта шлихтовочного перемещения и вращения и через задатчики направления перемещения и вращения,, выход блока команды щлихтовочного перемещения и вращения соединен через задатчик режимов и через выход блока единичного реверса с блоком приема команд, с блоками послеударного отсчета перемещения и послеударйого отсчета угла поворота, с устройством включения приводов перемещения и вращения через задатчики направления перемещения и вращения, выходы устройства включения привода перемещения также соединены с блоком приема команд, с блоком изменения скорости перемещения, с блоком послеударного отсчета перемещения через задатчик величины перемещения и вращения и через выход блока команды ишихтовочного перемещения и вращения, выходы устройства включений {фивода вращения также соединены с блоком приема команд, с блоком изменения скорости вращения, с блоком послеударного отсчета угла вращения ч,6рез задатчик угла поворота и через
блока команды шлихтовочного перемещения и вращения.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке № 2511169/25-27, кл. В 21 J 7/46, 28.07.77.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления ковочным молотом и механизмом ориентации поковки | 1981 |
|
SU1087242A1 |
| Пневмоэлектрическое устройство для управления ковочным молотом | 1977 |
|
SU738739A1 |
| Устройство управления паровоздушным молотом | 1983 |
|
SU1131584A1 |
| Система управления приводным пневматическим молотом | 1986 |
|
SU1353561A1 |
| Система управления пневматическим молотом с закрепленным на станине ресивером | 1983 |
|
SU1076175A1 |
| Система автоматического управления парогидравлическим ковочным прессом | 1979 |
|
SU774966A1 |
| Система управления паровоздушным штамповочным молотом | 1985 |
|
SU1310087A1 |
| Система управления штамповочным молотом | 1984 |
|
SU1175632A1 |
| Система управления молотом | 1986 |
|
SU1391793A1 |
| Пневмоэлектрическое устройство для управления ковочным молотом | 1977 |
|
SU651881A1 |
«fff
ifutr
//////////////////
иг. г