Изобретение относится к железнодорожному транспорту и может быть использовано для повышения уровня безопасности движения поездов при транспортировке длинномерных грузов, а именно рельсовых плетей (новых и старогодных), рельсов (новых, старогодных, инвентарных), сболченных в плети на рельсовозном составе.
Известны требования безопасности, которыми должна руководствоваться бригада, обслуживающая спецсостав в процессе погрузки, перевозки и выгрузки длинномерных рельсовых плетей. Согласно этим требованиям в пути следования груженого спецсостава из числа сопровождающих должен быть выделен дежурный в тамбур вагона для наблюдения за состоянием крепления рельсовых плетей на передней платформе и принятия необходимых мер (остановка поезда, подача сигнала тревоги) в случае нарушения правильного положения плетей в составе (обрыв плетей, повреждение роликовых опор концами плетей). Дежурный должен иметь комплект сигнальных принадлежностей и подавать сигналы машинисту (Состав рельсовозный для перевозки 800-метровых плетей. Инструкция по эксплуатации, утв. МПС СССР 31.05.1988 № ЦП-4596, пп. 6.4.12).
Однако на сегодняшний день по прежнему остается актуальной проблема обеспечения безопасности движения при транспортировке рельсовых плетей. Анализ причин возникновения аварийных ситуаций, связанных с выбросом рельсовой плети в пути следования показывает, что решающим является человеческий фактор, на который, в частности, оказывает влияние погодные условия и время суток.
Известен рельсовозный состав, содержащий локомотив, соединенный с ним вагон, переднюю платформу для закрепления рельсовых плетей, платформу, содержащую опоры с безребордными роликами, промежуточные платформы, оборудованные двумя опорами с ребордными роликами, понижающую платформу, оснащенную роликовыми опорами, заднюю платформу для закрепления рельсовых плетей, платформу, оснащенную противокантовочными устройствами, предохраняющими рельсовые плети от вертикальных и боковых перемещений, и дополнительным направляющим устройством, концевую платформу, оборудованную грузоподъемным, направляющим и захватными устройствами (патент на полезную модель RU 23441, МПК Е01В 29/02, 2002).
Недостатком известного рельсовозного состава является отсутствие технических средств для постоянного мониторинга условий перевозки длинномерных грузов.
Известна система контроля негабаритности подвижного состава (патент на полезную модель RU 120936, МПК B61K 9/02, 2012), содержащая смонтированные на боковых опорах с разнесением по высоте шесть видеокамер, которые подключены через блок обработки сигналов к входу персонального компьютера автоматизированного рабочего места диспетчера. Система снабжена синхронизатором, вход запуска которого соединен с выходом персонального компьютера, выход синхронизатора подключен к входам синхронизации видеокамер, при этом оптические оси видеокамер направлены вдоль железнодорожного пути таким образом, что две видеокамеры в верхней части и две видеокамеры на каждой боковой опоре образуют соответствующие стереопары.
Данная система позволяет повысить качество осмотра вагонов за счет объединения оптических камер в стереопары для стереоскопического изображения проходящего состава вагонов с грузом в разрешенных границах, однако такую систему нельзя использовать для контроля вагонов в пути следования.
Известна система видеонаблюдения вагона (патент на изобретение RU 2484532, МПК G08B 13/196, G08B 25/08, H04N 7/18, 2011), содержащая, по меньшей мере, одну видеокамеру, установленную с возможностью просмотра, по меньшей мере, части внутреннего пространства пассажирского вагона. Видеокамера подключена к входу видеорегистратора, к второму входу которого обратимо подключен блок контроля и управления, первый выход видеорегистратора выполнен с возможностью подключения к системе передачи данных, а второй выход подключен к монитору, установленному в купе проводника. Система может быть выполнена с возможностью передачи информации к компьютеру начальника поезда или по радиоканалу.
Эта система имеет ограниченные функциональные возможности. Она позволяет непрерывно контролировать и регистрировать возникновение нестандартных ситуаций внутри вагона в пути его следования, но ее технических средств недостаточно для организации контроля условий перевозки длинномерных грузов на специальном железнодорожном подвижном составе.
Наиболее близкой по своим технической сущности к изобретению является выбранная в качестве прототипа автоматизированная система мониторинга перевозок грузов железнодорожным транспортом (патент на изобретение RU 2466460, МПК G08G 1/01, G08G 1/13, G08G 1/123, G08B 25/08, G08B 25/10, B61L 25/00, 2012), включающая подвижный пункт мониторинга с автоматизированным рабочим местом, состоящий из подвижного диспетчерского пункта, располагаемого в вагоне сопровождения железнодорожного транспорта и включающего блок связи и навигации, блок питания блока связи и навигации, модуль радиоканала межвагонной связи с приемопередающей антенной, вход-выход которого через многопортовый преобразователь интерфейсов соединен с входом-выходом автоматизированного рабочего места подвижного диспетчерского пункта, источника бесперебойного питания, подключенного к блоку связи и навигации и автоматизированному рабочему месту подвижного диспетчерского пункта. Автоматизированная система мониторинга перевозок грузов содержит также комплекс технических средств мониторинга груза, располагаемого в вагоне с грузом и включающего комплект контактных датчиков типа «сухой контакт», комплект беспроводных датчиков с автономными источниками питания, модуль радиоканала межвагонной связи с приемопередающей антенной, взаимосвязанный по радиоканалу с аналогичным модулем радиоканала межвагонной связи подвижного диспетчерского пункта с приемопередающей антенной, аккумуляторную батарею для питания модуля радиоканала комплекса технических средств мониторинга груза. При этом комплекс технических средств мониторинга грузов выполнен с возможностью контроля состояния, например, дверей, люков, силы натяжения элемента крепления груза и т.п.
Известная автоматизированная система предназначена, в основном, для контроля груза, перемещаемого в крытых вагонах и полувагонах. Однако ее технических средств недостаточно для обеспечения безопасных условий транспортирования длинномерных грузов (рельсовых плетей длиной 800 м), расположенных на рельсовозном составе, образованном соединенными между собой железнодорожными платформами с опущенными торцевыми бортами.
Изобретение решает задачу перехода от визуального контроля положения рельсовых плетей на рельсовозном составе к постоянному автоматизированному мониторингу груза для обеспечения безопасности движения других рельсовых транспортных средств (попутного следования, встречных) и предотвращения аварийных ситуаций, в том числе с вагоном сопровождения рельсовозного состава.
Технический результат заключается в повышении надежности контроля габаритного состояния транспортируемого длинномерного груза.
Указанный технический результат достигается тем, что автоматизированная система мониторинга перевозок грузов на железнодорожном подвижном составе содержит подвижный пункт мониторинга с автоматизированным рабочим местом, располагаемый в вагоне сопровождения железнодорожного подвижного состава, источник бесперебойного питания, подключенный к автоматизированному рабочему месту подвижного пункта мониторинга, комплекс технических средств мониторинга груза, смонтированный на вагонах с грузом, включающий комплекты датчиков, каналы связи, включающие модули радиоканала межвагонной связи с приемопередающими антеннами, взаимосвязанные по радиоканалу с модулем радиоканала межвагонной связи подвижного пункта мониторинга с приемопередающей антенной, и аккумуляторные батареи для питания модулей радиоканала межвагонной связи. Автоматизированная система дополнительно содержит модуль радиоканала межвагонной связи с приемопередающей антенной, предназначенный для контроля за целостностью проводного канала связи, первый комплект датчиков установлен с возможностью взаимодействия с длинномерным грузом и смонтирован на поперечно установленных на замковой платформе планках, одна из которых закреплена в отбойниках платформы, а другая - на ее конце, второй комплект датчиков размещен в отбойниках в средней части проходной платформы с возможностью взаимодействия с концами габаритной П-образной планки, третий комплект датчиков закреплен на модуле радиоканала межвагонной связи с приемопередающей антенной с возможностью взаимодействия с упорными планками, зажатыми между направляющими лыжами и концом длинномерного груза.
Благодаря наличию комплекса специальных технических средств мониторинга длинномерного груза (рельсовых плетей), смонтированного на вагонах-платформах, достигается возможность постоянного контроля за состоянием габарита груза при его транспортировании с учетом допустимого и необходимого смещения в пути следования. Этот комплекс предусматривает также возможность контроля концов рельсовых плетей от заклинивания путем мониторинга наличия на них специальных лыж.
Технический результат достигается также тем, что на концевой платформе установлен дизель-генератор, соединенный со смонтированным вдоль всего железнодорожного подвижного состава проводным каналом связи. Этот дизель-генератор позволяет автономно, в ходе следования, вырабатывать электроэнергию для обеспечения работоспособности автоматизированной системы и подзаряжать при этом аккумуляторы в модулях радиоканала межвагонной связи с приемопередающей антенной, входящих в комплекс технических средств мониторинга груза. Таким образом, наличие дизель-генератора существенно повышает надежность системы питания и снижает затраты на обслуживание системы в целом.
Наличием наряду с модулями радиоканала межвагонной связи проводного канала связи, передающего сигнал об аварийной ситуации при отсутствии возможности передачи радиосигнала (сложная местность - горы, подъемы и спуски), обеспечивается повышение надежности контроля габаритного состояния перевозимого длинномерного груза.
Кроме того, автоматизированное рабочее место подвижного пункта мониторинга содержит сигнальный пульт для приема сигнала по проводному каналу связи, блок радиоканала межвагонной связи с приемопередающей антенной, блок выносной индикации, источник бесперебойного питания, включающий блок аккумуляторных батарей и систему с зарядными устройствами для аккумуляторных батарей.
Каждый модуль радиоканала межвагонной связи с приемопередающей антенной, установленный на замковых и проходных платформах, содержит контактирующий с закрепленными на планках датчиками, датчик аварии, взаимодействующий по радиоканалу межвагонной связи с установленным на автоматизированном рабочем месте блоком радиоканала межвагонной связи с приемопередающей антенной, при этом вход датчика аварии через блок предохранителей соединен с аккумуляторной батареей, подключенной к зарядному устройству, через стабилизатор напряжения и блок предохранителей соединенному с проводным каналом связи.
Модули радиоканала межвагонной связи с приемопередающей антенной, установленные на концах длинномерного груза для контроля за положением направляющих лыж, содержат контактирующий посредством упорных планок с соответствующими датчиками датчик аварии, взаимодействующий по радиоканалу межвагонной связи с приемопередающей антенной с блоком радиоканала межвагонной связи с приемопередающей антенной, при этом вход датчика аварии через блок предохранителей соединен с аккумуляторной батареей.
Модуль радиоканала межвагонной связи с приемопередающей антенной, предназначенный для контроля за целостностью проводного канала связи, включает электромагнитное реле, датчик аварии, взаимодействующий по радиоканалу межвагонной связи с приемопередающей антенной с блоком радиоканала межвагонной связи с приемопередающей антенной, причем вход датчика аварии через блок предохранителей соединен с аккумуляторной батареей, подключенной к зарядному устройству, через стабилизатор напряжения и блок предохранителей соединенному с проводным каналом связи.
Первый комплект датчиков, смонтированных на замковой платформе, включает взаимодействующий с планкой, закрепленной на конце платформы, датчик круговых перемещений.
Второй комплект датчиков, предназначенный для контроля смещения длинномерного груза, размещен на каждой третьей проходной платформе.
Третий комплект датчиков, предназначенный для контроля за положением направляющих лыж, оснащен автономным источником питания.
У оператора автоматизированной системы мониторинга перевозок грузов, дежурящего за сигнальным пультом автоматизированного рабочего места подвижного пункта мониторинга, установлена прямая связь с машинистом локомотива, осуществляющего перевозку, что позволяет произвести остановку состава, значительно сокращая ущерб подвижному составу и прилегающей инфраструктуре.
Таким образом, автоматизированная система мониторинга перевозок грузов на железнодорожном подвижном составе позволяет в непрерывном режиме контролировать положение длинномерного груза - рельсовых плетей, исправность замковых устройств для них и состояние специальных лыж.
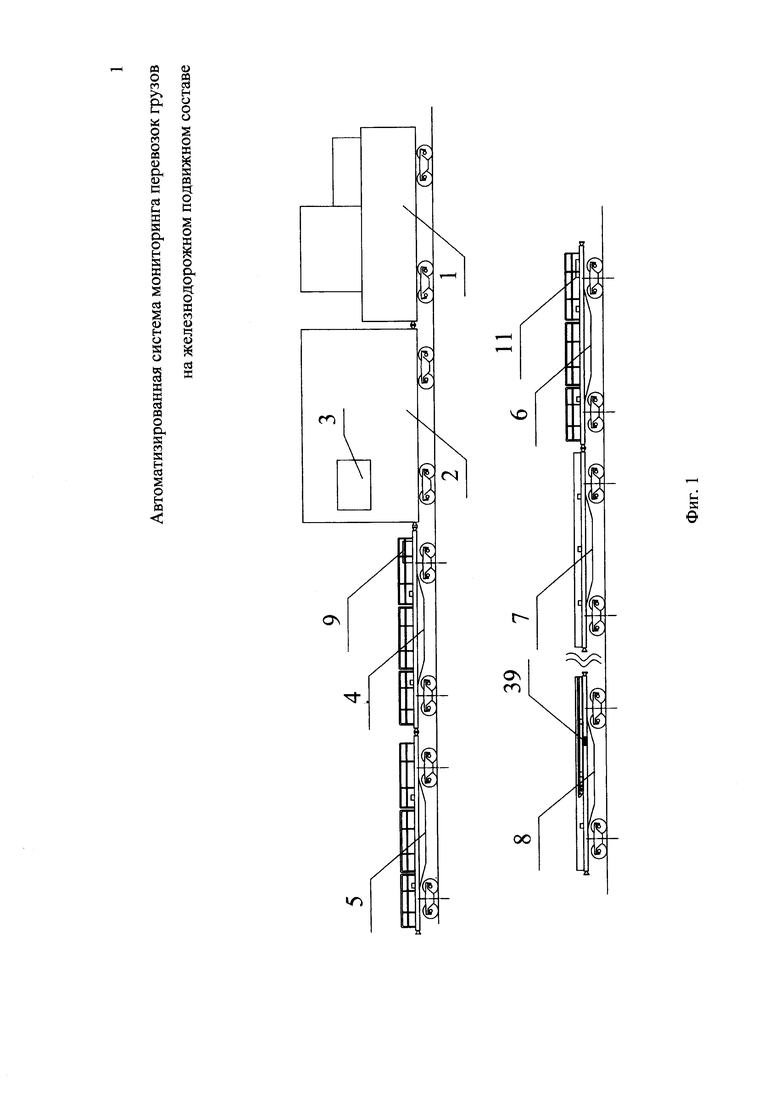
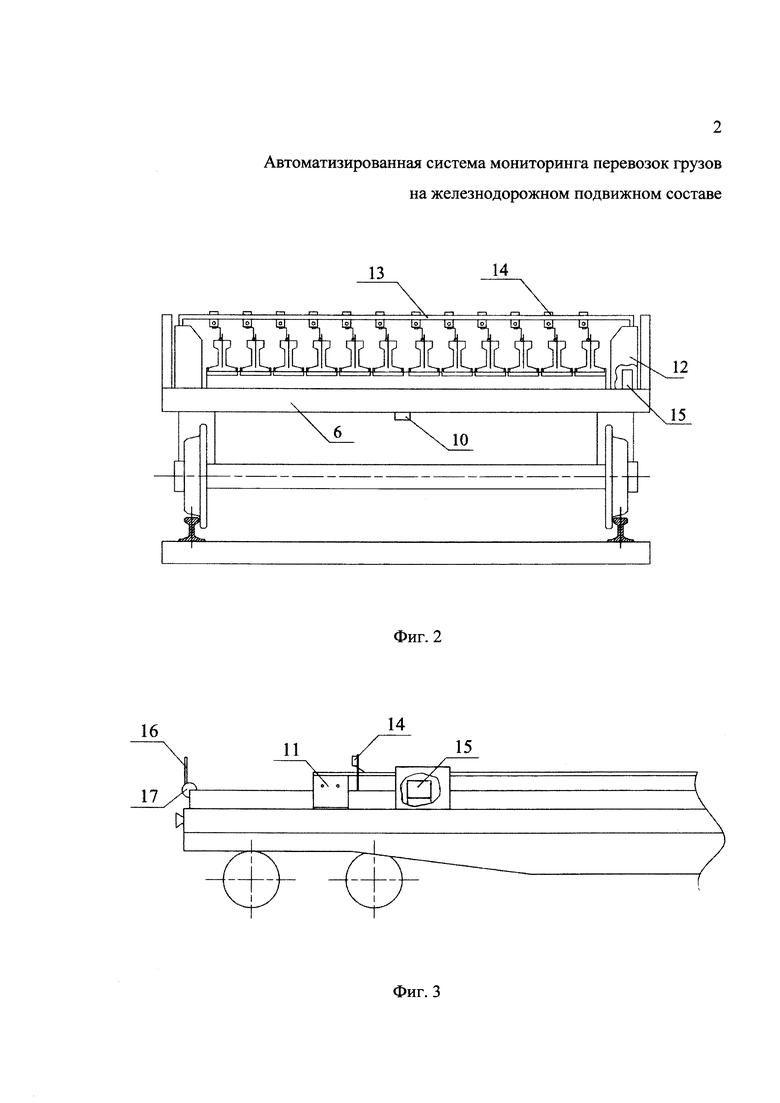
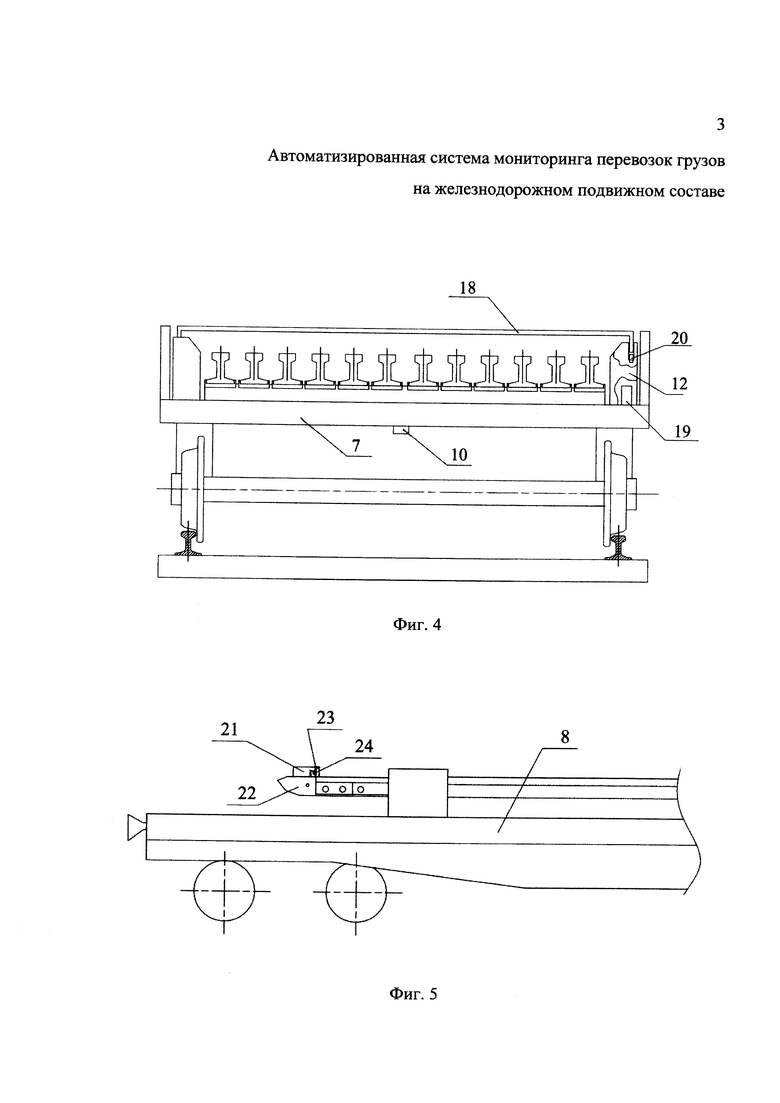
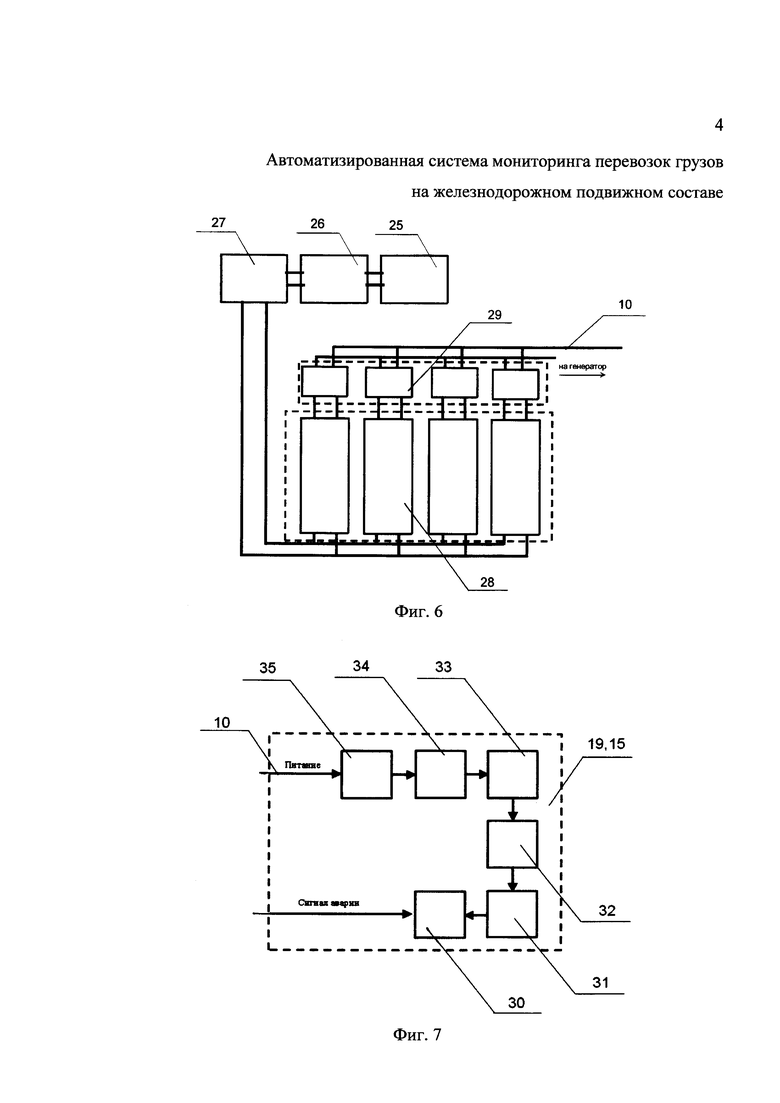
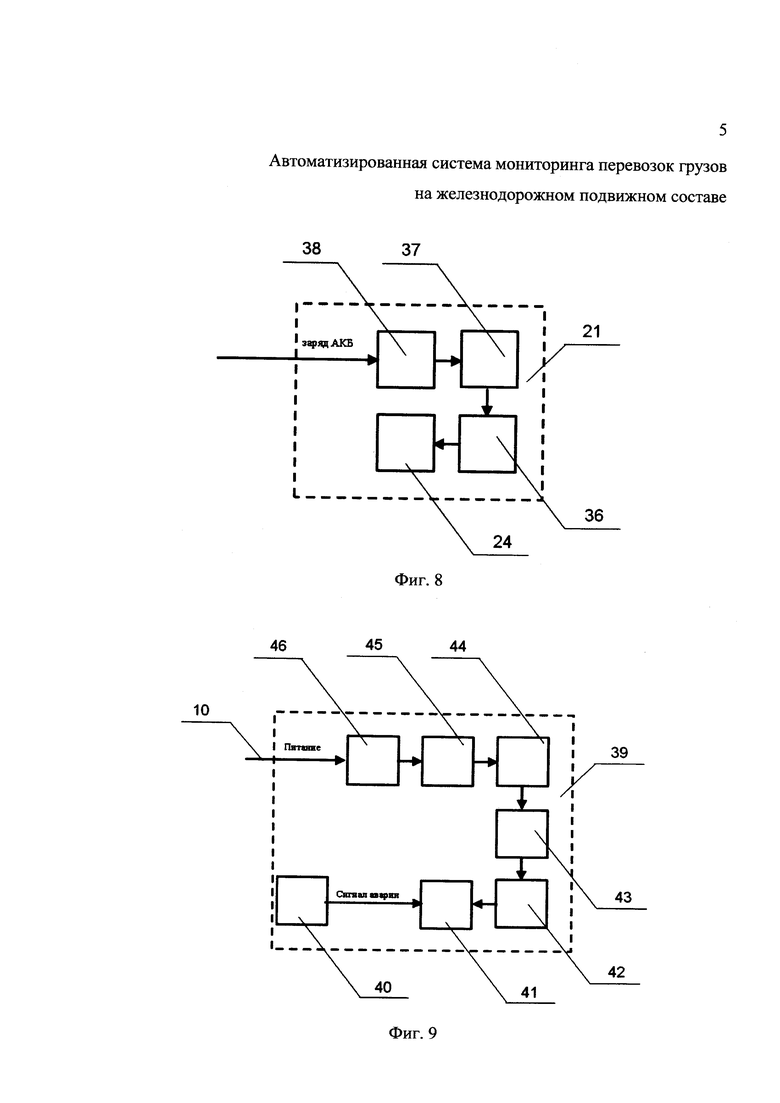
На фиг. 1 изображен вид спереди рельсовозного состава, оборудованного автоматизированной системой мониторинга перевозки длинномерных грузов; на фиг. 2 - замковая платформа, вид с торца; на фиг. 3 - то же, фрагмент вида спереди; на фиг. 4 - проходная платформа, вид с торца; на фиг. 5 - проходная платформа, фрагмент вида спереди с концом рельсовой плети и направляющей лыжей; на фиг. 6 - блок-схема оборудования автоматизированного рабочего места подвижного пункта мониторинга; на фиг. 7 - блок-схема модулей контроля смещения груза, установленных на замковой и проходной платформах; на фиг. 8 - блок-схема модуля контроля за положением направляющих лыж; на фиг. 9 - блок-схема модуля контроля за целостностью проводного канала связи.
В данном примере осуществления изобретения автоматизированная система мониторинга перевозок грузов на железнодорожном подвижном составе смонтирована на рельсовозном составе, предназначенном для транспортировки длинномерного груза в виде рельсовых плетей длиной 800 м.
Рельсовозный состав (фиг. 1), включает локомотив 1, соединенные с ним вагон сопровождения 2 с размещенным в нем подвижным пунктом мониторинга с автоматизированным рабочим местом 3, железнодорожные платформы, в том числе: концевая платформа 4, противокантовочная платформа 5, замковая платформа 6, проходные платформы 7 и платформы 8. На платформах 7 и 8 рельсовозного состава опущены торцевые борта для образования единого места перевозки длинномерных рельсовых плетей.
На платформе 4 установлен дизель-генератор 9. На платформе 5 установка специального оборудования не предусмотрена.
Дизель-генератор 9 соединен со смонтированным вдоль всего рельсовозного состава проводным каналом связи 10 (фиг. 2), предназначенным для питания и заряда аккумуляторных батарей комплекса технических средств мониторинга груза, размещенного на платформах, а также для взаимодействия с оборудованием автоматизированного рабочего места 3, размещенного в вагоне сопровождения 2.
Платформа 6 оборудована замковыми устройствами 11, техническими средствами мониторинга груза, включающими смонтированные в отбойниках 12 (фиг. 2) планку 13, поперечно установленную относительно платформы, закрепленные на этой планке с возможностью взаимодействия с рельсовыми плетями контактные датчики 14, предназначенные для контроля продольных смещений рельсовых плетей в направлении лыж, и модули 15 радиоканала межвагонной связи с приемопередающей антенной для контроля смещения груза.
Технические средства мониторинга груза на платформе 6 также включают планку 16 (фиг. 3), оснащенную датчиком круговых перемещений 17, предназначенным для фиксации продольных смещений рельсовых плетей в направлении вагона сопровождения 2.
Проходные платформы 7, а именно каждая третья платформа рельсовозного состава, оборудованы техническими средствами мониторинга груза, выполненными в виде габаритной П-образной планки 18 (фиг. 4), расположенной в средней части платформы, и размещенным внутри отбойников 12 модулем 19 радиоканала межвагонной связи с приемопередающей антенной для контроля смещения груза, выполненным аналогично установленному на замковых платформах 6 модулю 15. Концы П-образных планок 18 установлены в вертикальные отверстия отбойников 12 с возможностью взаимодействия с контактными датчиками 20, установленными там же.
На концах рельсовых плетей, уложенных на платформе 8, также установлены технические средства мониторинга груза, включающие модули 21 радиоканала межвагонной связи с приемопередающей антенной (фиг. 5) для контроля за положением направляющих лыж 22 и упорные планки 23, зажатые между направляющими лыжами и концом рельсовой плети. На модуле 21 закреплены контактные датчики 24.
Автоматизированное рабочее место 3 подвижного пункта мониторинга оснащено сигнальным пультом 25 (фиг. 6) для приема сигнала по проводному каналу связи 10, блоком 27 радиоканала межвагонной связи с приемопередающей антенной, блоком выносной индикации 26, позволяющим определить, на какой платформе сработала аварийная сигнализация, источником бесперебойного питания, включающим блок аккумуляторных батарей 28 и систему с зарядными устройствами 29 для аккумуляторных батарей, соединенную с дизель-генератором 9.
Каждый из выполненных единообразно модулей 15 и 19 радиоканала межвагонной связи с приемопередающей антенной, установленных на платформах 6 и 7 соответственно, содержит контактирующий с датчиками 14, 17 или 20 датчик аварии 30 (фиг. 7), взаимодействующий по радиоканалу межвагонной связи с установленным на автоматизированном рабочем месте 3 блоком 27 радиоканала межвагонной связи с приемопередающей антенной. Вход датчика 30 через блок 31 предохранителей соединен с аккумуляторной батареей 32, подключенной к зарядному устройству 33, через стабилизатор напряжения 34 и блок 35 предохранителей соединенному с проводным каналом связи 10.
Закрепленные на концах рельсовых плетей на платформе 8 модули 21 радиоканала межвагонной связи с приемопередающей антенной, предназначенные для контроля за положением направляющих лыж, содержат контактирующий посредством упорных планок 23 с контактными датчиками 24 датчик аварии 36 (фиг. 8), взаимодействующий по радиоканалу межвагонной связи с приемопередающей антенной с блоком 27 радиоканала межвагонной связи с приемопередающей антенной. Вход датчика 36 через блок 37 предохранителей соединен с аккумуляторной батареей (АКБ) 38.
Кроме того, на платформе 8 расположен модуль 39 радиоканала межвагонной связи с приемопередающей антенной (фиг. 9), предназначенный для контроля за целостностью проводного канала связи 10, включающий электромагнитное реле 40, датчик аварии 41, взаимодействующий по радиоканалу межвагонной связи приемопередающей антенной с блоком 27 радиоканала межвагонной связи с приемопередающей антенной. Вход датчика 41 через блок 42 предохранителей соединен с аккумуляторной батареей 43, подключенной к зарядному устройству 44, через стабилизатор напряжения 45 и блок 46 предохранителей соединенному с проводным каналом связи 10.
Работает автоматизированная система мониторинга перевозок грузов железнодорожным транспортом следующим образом.
При подготовке автоматизированной системы рельсовозного состава к транспортированию груза проверяют уровень заряда аккумуляторных батарей 28 (фиг. 6), установленных в подвижном пункте мониторинга, размещенном в вагоне сопровождения 2 (фиг. 1). При снижении заряда аккумуляторных батарей их подзаряжают при помощи зарядных устройств 29, соединенных посредством проводного канала связи 10 с установленным на платформе 4 дизель-генератором 9. Зарядка аккумуляторных батарей в модулях 15, 19 (фиг. 7) и модуле 39 (фиг. 9) осуществляется по проводному каналу 10 от блока аккумуляторных батарей 28.
В случае проследования рельсовозного состава в нормальном режиме, без возникновения аварийных ситуаций, в штатном положении находятся размещенные на платформах 6, 7 модули 15, 19 радиоканала межвагонной связи с приемопередающей антенной для контроля смещения груза, размещенные на платформе 8 модуль 21 радиоканала межвагонной связи с приемопередающей антенной для контроля за положением направляющих лыж и модуль 39 радиоканала межвагонной связи с приемопередающей антенной для контроля за целостностью проводного канала связи 10.
Модули 15, 19, 21, 39 передают посредством радиосигнала через блок 27 (фиг. 6, 8) радиоканала межвагонной связи с приемопередающей антенной сигнал о безопасной транспортировке рельсовых плетей на блок выносной индикации 26 автоматизированного рабочего места 3, размещенного в вагоне сопровождения 2. Сигнал от модулей 15, 19 дублируются по проводному каналу связи 10, смонтированному вдоль рельсовозного состава, передается датчиком аварии на сигнальный пульт 25.
При срыве замковых устройств на платформе 6, приводящем к продольному смещению рельсовых плетей в направлении лыж (к концу рельсовозного состава), срабатывают контактные датчики 14 (фиг. 2). Модуль 15 радиоканала межвагонной связи с приемопередающей антенной посредством блока 27 радиоканала межвагонной связи передает сигнал тревоги на блок выносной индикации 26, а также по проводному каналу связи 10 на сигнальный пульт 25 автоматизированного рабочего места 3 подвижного пункта мониторинга. При этом на блоке выносной индикации 26 отображается информация, на какой именно платформе случилась аварийная ситуация. Далее оператор автоматизированной системы передает информацию путем средств радио- или мобильной связи машинисту локомотива 1 рельсовозного состава, который принимает меры к остановке состава.
При срыве замковых устройств на платформе 6 и продольному смещению рельсовых плетей в направлении вагона сопровождения 2 (к началу рельсовозного состава) опускается планка 16 (фиг. 3) и срабатывает датчик круговых перемещений 17, модуль 15 радиоканала межвагонной связи с приемопередающей антенной посредством блока 27 радиоканала межвагонной связи передает сигнал тревоги на блок выносной индикации 26, а также по проводному каналу связи 10 на сигнальный пульт 25 автоматизированного рабочего места 3 подвижного пункта мониторинга. При этом на блоке выносной индикации 26 отображается информация, на какой именно платформе случилась аварийная ситуация. Далее оператор автоматизированной системы передает информацию путем средств радио- или мобильной связи машинисту локомотива 1 рельсовозного состава, который принимает меры к остановке состава.
В случае выброса рельсовой плети (плетей) на проходных платформах 7 срывается габаритная П-образная планка 18 (фиг. 4), срабатывает концевой датчик 20 и модуль 19 радиоканала межвагонной связи с приемопередающей антенной посредством блока 27 радиоканала межвагонной связи и проводного канала связи 10 передает сигнал тревоги на автоматизированное рабочее место 3. Модуль 19 радиоканала межвагонной связи с приемопередающей антенной посредством блока 27 радиоканала межвагонной связи передает сигнал тревоги на блок выносной индикации 26, а также по проводному каналу связи 10 на сигнальный пульт 25 автоматизированного рабочего места 3 подвижного пункта мониторинга. При этом на блоке выносной индикации 26 отображается информация, на какой именно платформе случилась аварийная ситуация. Далее оператор автоматизированной системы передает информацию путем средств радио- или мобильной связи машинисту локомотива 1 рельсовозного состава, который принимает меры к остановке состава.
В случае потери направляющей лыжи 22 срабатывает прижатый к упорной планке 23 контактный датчик 24, взаимодействующий с модулем 21 радиоканала межвагонной связи с приемопередающей антенной. Модуль 21 посредством блока 27 радиоканала межвагонной связи передает сигнал тревоги на блок выносной индикации 26 автоматизированного рабочего места 3, на котором отображается номер плети с утерянным контролем лыжи.
Модуль 21 радиоканала межвагонной связи с приемопередающей антенной посредством блока 27 радиоканала межвагонной связи передает сигнал тревоги на блок выносной индикации 26, а также по проводному каналу связи 10 на сигнальный пульт 25 автоматизированного рабочего места 3 подвижного пункта мониторинга. При этом на блоке выносной индикации 26 отображается информация, на какой именно платформе случилась аварийная ситуация. Далее оператор автоматизированной системы передает информацию путем средств радио- или мобильной связи машинисту локомотива 1 рельсовозного состава, который принимает меры к остановке состава.
При наращении целостности проводного канала (порыв, излом соединения, хищение и т.д.) срабатывает электромагнитное реле 40, модуль 39 радиоканала межвагонной связи с приемопередающей антенной посредством блока 27 радиоканала межвагонной связи передает сигнал тревоги на автоматизированное рабочее место 3. На блоке выносной индикации 26 отображается информация о нарушении целостности линии. В этом случае оператор автоматизированной системы визуально с применением бинокля проверяет рельсовозный состав. Более детальную проверку целостности кабельной линии проводят на ближайшей остановке.
При обнаружении факта хищения оператор автоматизированной системы передает информацию путем средств радио- или мобильной связи машинисту локомотива и дежурной по станции для передачи информации в правоохранительные органы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| Съемный модуль с оборудованием рельсовозного состава для подтягивания рельсовых плетей | 2024 |
|
RU2817656C1 |
| Автоматизированная система контроля мотор-вагонного подвижного состава | 2021 |
|
RU2774509C1 |
| Система контроля целостности состава | 2015 |
|
RU2614158C1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УЧЕТА ГРУЗОВЫХ ПЕРЕВОЗОК И ONLINE МОНИТОРИНГА СОХРАННОСТИ ГРУЗОВ | 2017 |
|
RU2672172C1 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| Способ мониторинга объектов инфраструктуры железнодорожной станции | 2019 |
|
RU2744414C2 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА БЕЗОПАСНОСТИ ТРАНСПОРТИРОВАНИЯ СПЕЦИАЛЬНЫХ ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2014 |
|
RU2574496C1 |
| Рельсовозный состав | 1988 |
|
SU1608281A1 |
| Система для мониторинга состояния объектов железнодорожного транспорта | 2023 |
|
RU2807663C1 |
Изобретение относится к области автоматики и телемеханики на железнодорожном транспорте для контроля при перевозке длинномерных рельсовых плетей. Система включает подвижный пункт мониторинга с автоматизированным рабочим местом, источник бесперебойного питания и комплекс технических средств мониторинга груза, включающий комплекты датчиков, каналы проводной и беспроводной связи, а также аккумуляторные батареи. Дополнительно введены модуль межвагонной связи, предназначенный для контроля за целостностью проводного канала связи, первый комплект датчиков, смонтированный на поперечно установленных на замковой платформе планках, второй комплект датчиков, размещенный на проходной платформе с возможностью взаимодействия с концами габаритной П-образной планки, третий комплект датчиков, закрепленный на модуле радиоканала межвагонной связи с приемопередающей антенной с возможностью взаимодействия с упорными планками, зажатыми между направляющими лыжами и концом длинномерного груза. Достигается повышение надежности контроля габаритного состояния транспортируемого груза. 8 з.п. ф-лы, 9 ил.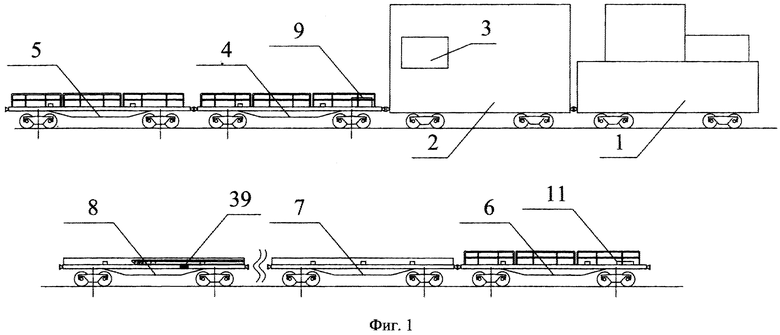
1. Автоматизированная система мониторинга перевозок грузов на железнодорожном подвижном составе, содержащая подвижный пункт мониторинга с автоматизированным рабочим местом, располагаемый в вагоне сопровождения железнодорожного подвижного состава, источник бесперебойного питания, подключенный к автоматизированному рабочему месту подвижного пункта мониторинга, комплекс технических средств мониторинга груза, смонтированный на вагонах с грузом, включающий комплекты датчиков, каналы связи, включающие модули радиоканала межвагонной связи с приемопередающими антеннами, взаимосвязанные по радиоканалу с модулем радиоканала межвагонной связи подвижного пункта мониторинга с приемопередающей антенной, аккумуляторные батареи для питания модулей радиоканала межвагонной связи, отличающаяся тем, что она дополнительно содержит модуль радиоканала межвагонной связи с приемопередающей антенной, предназначенный для контроля за целостностью проводного канала связи, первый комплект датчиков установлен с возможностью взаимодействия с длинномерным грузом и смонтирован на поперечно установленных на замковой платформе планках, одна из которых закреплена в отбойниках платформы, а другая - на ее конце, второй комплект датчиков размещен в отбойниках в средней части проходной платформы с возможностью взаимодействия с концами габаритной П-образной планки, третий комплект датчиков закреплен на модуле радиоканала межвагонной связи с приемопередающей антенной с возможностью взаимодействия с упорными планками, зажатыми между направляющими лыжами и концом длинномерного груза.
2. Система по п. 1, отличающаяся тем, что на концевой платформе установлен дизель-генератор, соединенный со смонтированным вдоль всего железнодорожного подвижного состава проводным каналом связи.
3. Система по п. 1, отличающаяся тем, что автоматизированное рабочее место подвижного пункта мониторинга содержит сигнальный пульт для приема сигнала по проводному каналу связи, блок радиоканала межвагонной связи с приемопередающей антенной, блок выносной индикации, источник бесперебойного питания, включающий блок аккумуляторных батарей и систему с зарядными устройствами для аккумуляторных батарей.
4. Система по п. 1, отличающаяся тем, что каждый модуль радиоканала межвагонной связи с приемопередающей антенной, установленный на замковых и проходных платформах, содержит контактирующий с закрепленными на планках датчиками датчик аварии, взаимодействующий по радиоканалу межвагонной связи с установленным на автоматизированном рабочем месте блоком радиоканала межвагонной связи с приемопередающей антенной, при этом вход датчика аварии через блок предохранителей соединен с аккумуляторной батареей, подключенной к зарядному устройству, через стабилизатор напряжения и блок предохранителей соединенному с проводным каналом связи.
5. Система по п. 1, отличающаяся тем, что модули радиоканала межвагонной связи с приемопередающей антенной, установленные на концах длинномерного груза для контроля за положением направляющих лыж, содержат контактирующий посредством упорных планок с контактными датчиками датчик аварии, взаимодействующий по радиоканалу межвагонной связи с приемопередающей антенной с блоком радиоканала межвагонной связи с приемопередающей антенной, при этом вход датчика аварии через блок предохранителей соединен с аккумуляторной батареей.
6. Система по п. 1, отличающаяся тем, что модуль радиоканала межвагонной связи с приемопередающей антенной, предназначенный для контроля за целостностью проводного канала связи, включает электромагнитное реле, датчик аварии, взаимодействующий по радиоканалу межвагонной связи приемопередающей антенной с блоком радиоканала межвагонной связи с приемопередающей антенной, причем вход датчика аварии через блок предохранителей соединен с аккумуляторной батареей, подключенной к зарядному устройству, через стабилизатор напряжения и блок предохранителей соединенному с проводным каналом связи.
7. Система по п. 1, отличающаяся тем, что первый комплект датчиков, установленных на замковой платформе, включает взаимодействующий с планкой, закрепленной на конце платформы, датчик круговых перемещений.
8. Система по п. 1, отличающаяся тем, что второй комплект датчиков, предназначенный для контроля смещения длинномерного груза, размещен на каждой третьей проходной платформе.
9. Система по п. 1, отличающаяся тем, что третий комплект датчиков, предназначенный для контроля направляющих лыж, оснащен автономным источником питания.
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА МОНИТОРИНГА ПЕРЕВОЗОК ГРУЗОВ ЖЕЛЕЗНОДОРОЖНЫМ ТРАНСПОРТОМ | 2010 |
|
RU2466460C2 |
| Центрирующее приспособление для автоматических сцепок железнодорожного подвижного состава | 1930 |
|
SU23441A1 |
| Способ получения непредельных углеводородов или богатых ими концентратов | 1928 |
|
SU29171A1 |
| DE 4408261 A1, 14.09.1995. | |||

