Изобретение относится к области гидроакустики и может быть использовано для расчета эффективности многопозиционной активно-пассивной гидроакустической системы наблюдения (ГСН). Гидроакустические антенны являются частью (чувствительным элементом) гидроакустических систем и комплексов. При этом специальные вычислители формируют на основе сигналов датчиков пространственно-временные либо пространственно-частотные спектры акустического поля с помощью адаптивных либо не адаптивных алгоритмов (Г.С. Малышкин "Оптимальные и адаптивные методы обработки гидроакустических сигналов", т. 1 "Оптимальные методы", СПб: Электроприбор, 2009 г., с. 175…185; Г.В. Лоскутова, К.И. Палканов "Пространственно-частотные и частотно-волновые методы описания и обработки гидроакустических полей", СПб: Наука, 2007 г., С. 108…135).
Расчет порога для построения вероятностных зон обнаружения при наличии одной излучающей и одной приемной антенны представлен в Р.А. Монзинго, Т.У. Миллер, Адаптивные антенные решетки, М: Радио и связь, 1986, с. 100-101.
Расчет дальности действия гидроакустических антенн-приемных систем (одна излучающая и одна приемная антенна) представлен в А.П. Сташкевич. Акустика моря, Ленинград "Судостроение", 1966, с. 314. Расчет реверберации (донной, объемной и поверхностной) представлен в А.П. Сташкевич, Акустика Моря, Ленинград "Судостроение", 1966, стр. 160.
Подходы, описанные в книге Р.А. Монзинго, Т.У. Миллер «Адаптивные антенные решетки.М.: Радио и связь, 1986, с. 100-101 и в книге А.П. Сташкевича «Акустика моря», Ленинград «Судостроение», 1966, с. 314, выбираются за аналог для заявляемого способа обработки сигналов.
Недостатком известных аналогов является отсутствие общей системы расчета, для наглядного демонстрирования определенной гидроакустической системы и сравнения ее с другими, с учетом различных конфигураций системы излучающих и приемных антенн и с учетом меняющихся гидрологических условий заданного региона.
Наиболее близким по своей сущности и достигаемому результату (прототипом) к предлагаемому способу является «Модель зон обнаружения морской РЛС» П.В. Николаева и Н.В. Самбурова, «Радиотехника», Журнал «Электромагнитные волны и электронные системы» №10 за 2014 г., с. 12-17, в которой рассмотрены прикладные вопросы построения зон обнаружения РЛС. Особое внимание уделено программной реализации построения зон и разработана модель прогнозирования зон обнаружения и алгоритм их построения, которая позволяют производить расчет и построение зон обнаружения на основе исходных данных о параметрах окружающей среды на трассе РЛС-цель, параметров станции и водной поверхности. Рассмотрены возможности разработанного ПО, реализующего основные положения работы.
Недостатком известной модели является отсутствие построения зон обнаружения при условии многопозиционной активно-пассивной гидроакустической системы. Также наш способ построения, в отличие от известной модели, учитывает водную среду распространения сигналов.
Обычно эффективность гидроакустических систем определяется вероятностью обнаружения при заданной вероятности ложной тревоги. Определение эффективности отдельных гидроакустических антенн обычно является частью гидроакустических расчетов и реализуется с помощью соответствующих компьютерных программ (в частности "Изделие «Онтомап В2» Программно-аппаратный комплекс гидроакустических расчетов - http://www.spiiras.nw.ru/ru/scientific-activity/unique-equipment.html).
Задачей изобретения является способ определения эффективности многопозиционных гидроакустических систем, содержащих произвольное число излучающих и приемных антенн.
Многопозиционные ГСН, состоящие из нескольких разнесенных в пространстве систем передающих и приемных антенн (в том числе и мобильных), являются более эффективными по сравнению с отдельными ГСН с одной передающей и одной приемной позициями. Методология построения многопозиционных ГСН и оценка их эффективности была разработана, в частности, в середине 80-х годов в Акустическом институте им. Н.Н. Андреева с учетом условий распространения звука в океане, определяемых с помощью расчетов функции Грина, статистических характеристик помех уровнями обмена между базовыми системами и центральным вычислительным комплексом (сигнальный уровень, уровень решающих статистик, уровень решений и т.д.).
Блок-схема устройства, реализующего способ определения эффективности многопозиционной гидроакустической системы, работающей в активном режиме, представлена на Фиг. 1.
Важнейшей частью блока измерения гидрологических параметров является устройство измерения скорости звука в зависимости от глубины. В качестве такого устройства может быть применен, например, измеритель XSV для ВМС США (Тарасюк Ю.Ф. Измеритель XSV для ВМС США. Судостроение за рубежом, 1979, 4, с. 90-93). В зависимости от температуры воды скорость распространения звука в толще воды может сильно отличаться. Именно этот факт и обуславливает периодический режим измерений гидрологических условий. Блок измерения характеристик волнения моря может быть создан на основе соответствующего измерителя (Простаков А.Л. Электронный ключ к океану, Л., Судостроение, 1986, с. 69), а база данных характеристик дна - имеющихся баз данных (Океанографические таблицы, Л., Гидрометеоиздат, 1975 г.). Определение местоположения излучающих и приемных антенн может быть осуществлено с помощью спутниковой системы глобального позиционирования (например, ГЛОНАСС). Помеха может быть представлена как сумма динамических шумов океана (включая шумы дальнего судоходства, уровень которых для заданного региона обычно известен) и реверберационной помехи. Расчет реверберационной помехи может быть осуществлен в соответствии с (Сухаревский Ю.М. Статистика основных акустических параметров глубоководных районов океана и вероятностная дальность действия гидроакустических систем. Акустический журнал. 1995, т. 41, №5, с. 848-864). Расчет динамических шумов океана может быть выполнен на основании (Акустика океана. Под. ред. Л.М. Бреховских // М.: Наука, 1974, 656-657 с.).
Блок-схема устройства, реализующего систему определения эффективности многопозиционной гидроакустической системы, работающей в пассивном режиме представлена на Фиг. 2. Как показывает сравнение рисунков, в пассивном режиме отсутствует расчет реверберационной помехи.
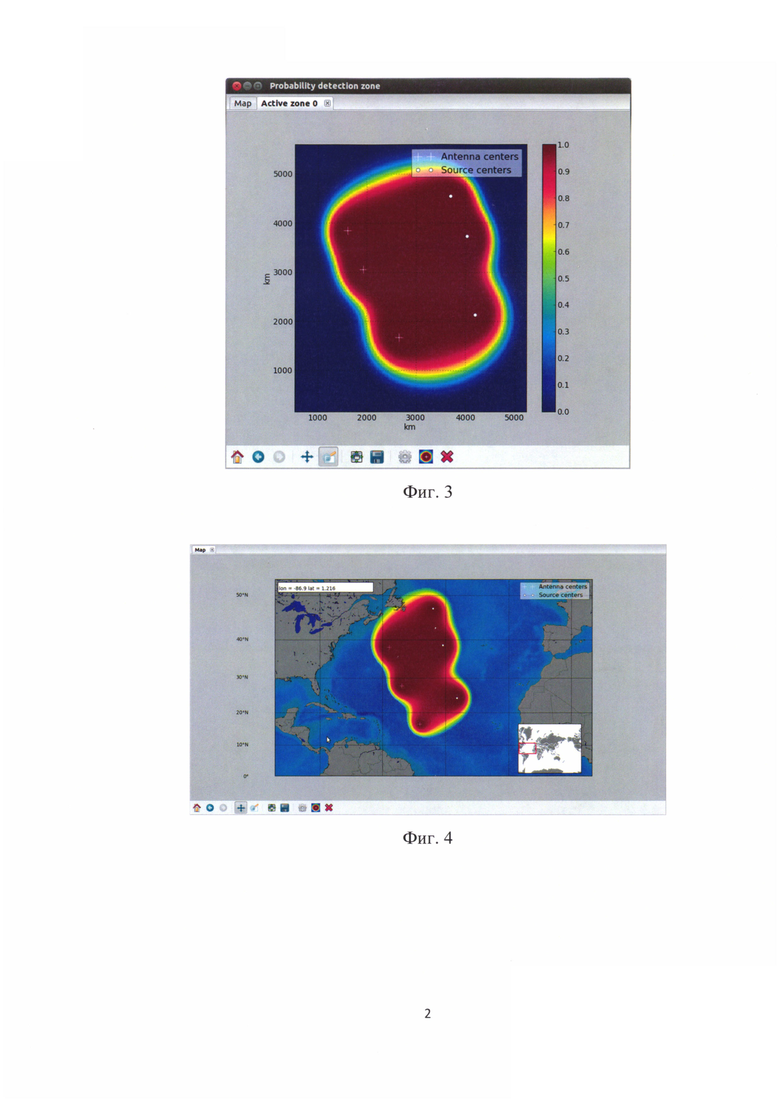
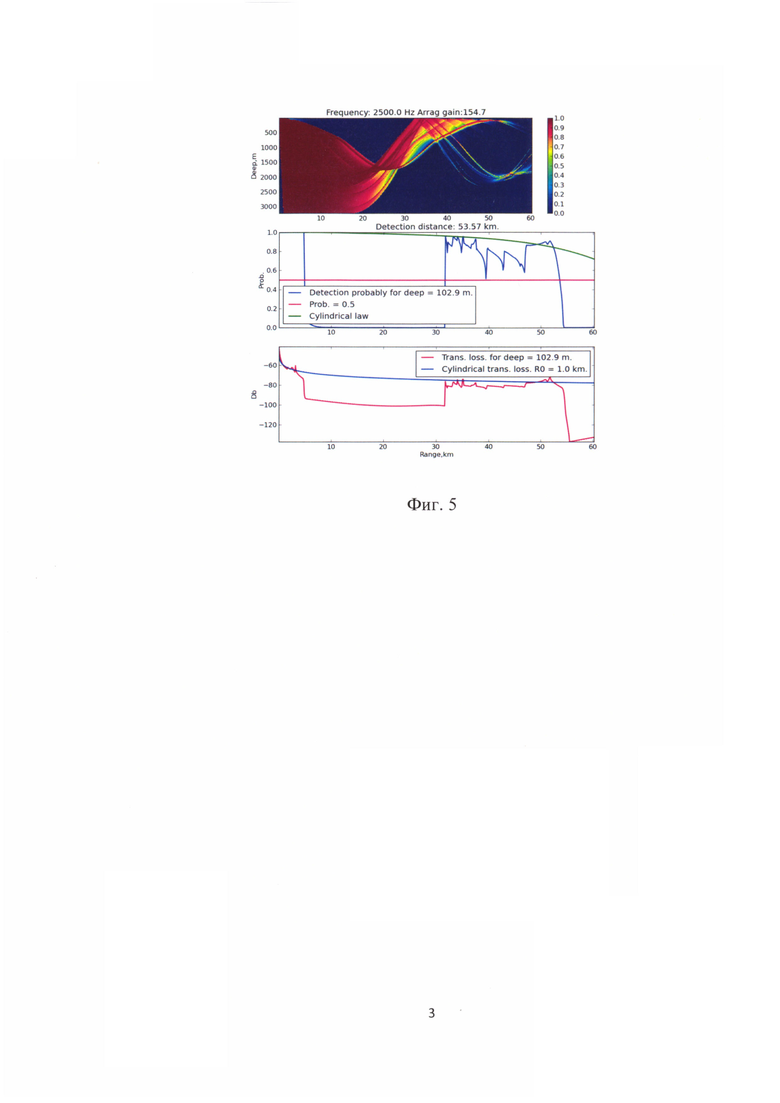
Наглядное изображение вероятности обнаружения может быть представлено в виде графических зон вероятности обнаружения (ЗВО) в виде сечений ЗВО в горизонтальной или вертикальной плоскости (фиг. 3, фиг. 4 и фиг. 5). Данные ЗВО позволяют оценить эффективность многопозиционной системы для заданной сигнально-помеховой обстановки, взаиморасположения приемных и излучающих антенн и гидрофизических параметров среды, что, в свою очередь, позволяет оценить дальности обнаружения в различных районах исследуемой зоны обнаружения, площади зон обнаружения с вероятностью, не ниже заданной и т.п.
Для системы из нескольких антенн возможны различные способы объединения информации, полученной на каждой из них. В частности, это объединение всей полученной информации, т.е. объединение статистик обнаружения, которое заключается в следующем. Рассматривается статистика следующего вида:
где uk - значение статистики на каждой антенне для каждого элемента пространственного разрешения (ЭПР), ak - весовые коэффициенты, в общем случае зависящие от номера ЭПР, K - количество приемных антенн.
В дальнейшем будем рассматривать только объединение по статистикам. Важной характеристикой алгоритмов обнаружения является выходное отношение сигнал/помеха (ВОСП), определяемое как
где M1(u) - математическое ожидание статистики обнаружения при наличии сигнала, М0(u) - математическое ожидание статистики обнаружения при отсутствии сигнала, D0(u) дисперсия статистики обнаружения при отсутствии сигнала.
Итоговое ВОСП на каждой антенне, при условии независимости статистик для различных антенн, может быть найдено по формуле:

Итоговую вероятность обнаружения в пассивном режиме при заданной вероятности ложной тревоги а находим по формуле:
где

Перейдем к рассмотрению активного режима. Пусть имеется L излучающих и K приемных антенн. Обозначим ρkl ВОСП для k-й антенны, принявшей сигнал от 1-ого излучателя. Вероятность правильного обнаружения при заданном уровне ложной помехи описывается следующим выражением

где Kα = Г-1(1-α, К), символ Г-1 означает взятие квантили гамма-распределения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения класса шумящего морского объекта | 2021 |
|
RU2760912C1 |
| Способ определения текущих координат цели в бистатическом режиме гидролокации | 2017 |
|
RU2653956C1 |
| Способ обнаружения морского движущегося объекта | 2020 |
|
RU2759416C1 |
| Способ и устройство обнаружения шумящих в море объектов бортовой антенной | 2019 |
|
RU2723145C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ | 2005 |
|
RU2298203C2 |
| СПОСОБ ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ | 2014 |
|
RU2555192C1 |
| Способ синхронизации корабельных гидроакустических станций | 2019 |
|
RU2726934C1 |
| УСТРОЙСТВО ОПЕРАТИВНОГО ОСВЕЩЕНИЯ ПОДВОДНОЙ ОБСТАНОВКИ В АКВАТОРИЯХ МИРОВОГО ОКЕАНА | 2012 |
|
RU2522168C2 |
| АКТИВНЫЙ ГИДРОЛОКАТОР | 2007 |
|
RU2346295C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ШУМЯЩИХ В МОРЕ ОБЪЕКТОВ С ПОМОЩЬЮ КОМБИНИРОВАННОГО ПРИЕМНИКА | 2017 |
|
RU2654335C1 |

Изобретение относится к области активно-пассивной гидролокации. Предложен способ определения эффективности многопозиционной активно-пассивной гидроакустической системы, заключающийся в вычислении зон вероятности обнаружения сигнала в виде сечений зон в горизонтальной или вертикальной плоскости при заданной вероятности ложной тревоги, различных конфигураций системы излучающих и приемных антенн и для меняющихся гидрологических условий заданного региона. Излучающие и приемные антенны могут быть как стационарными, так и находящимися на мобильных носителях. Предполагается периодическое измерение меняющихся гидрологических условий (характеристик гидроакустического канала распространения сигналов, характеристик волнения моря и др.), уточнение координат приемных и излучающих антенн и проведение расчета вероятности правильного обнаружения при заданном уровне ложной тревоги. 5 ил.
Способ определения эффективности многопозиционной активно-пассивной гидроакустической системы, заключающийся в вычислении зон вероятности обнаружения сигнала в виде сечений зон в горизонтальной или вертикальной плоскости при заданной вероятности ложной тревоги для определенной сигнально-помеховой обстановки, различных конфигураций системы излучающих и приемных антенн и разной гидрологии заданного региона, отличающийся тем, что проводится расчет вероятности правильного обнаружения при заданном уровне ложной помехи на основе итоговых выходных отношений сигнал/помеха, определяемых по объединенным статистикам обнаружения для каждой излучающей и приемной антенны в активном и пассивном режимах.
| US6161434 A1, 19.12.2000 | |||
| МЕТОД ПАССИВНОГО АКУСТИЧЕСКОГО МОНИТОРИНГА ПРИДОННЫХ ГАЗОЖИДКОСТНЫХ ПОТОКОВ | 2013 |
|
RU2521717C1 |
| US4697456 A1, 06.10.1987 | |||
| JP06341978 A, 13.12.1994 | |||
| СПОСОБ ПОВЫШЕНИЯ ЭФФЕКТИВНОСТИ НАВЕДЕНИЯ НА ПОДВОДНУЮ ЦЕЛЬ КОРРЕКТИРУЕМОГО ПОДВОДНОГО СНАРЯДА ПРОТИВОЛОДОЧНОГО БОЕПРИПАСА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2531794C2 |

